- Механические характеристики электродвигателей в процессе работы, пуска и торможения

Содержание
- 2. Механические характеристики электродвигателей в процессе работы, пуска и торможения. 1. Характеристики ДПТ 2. Способы пуска и
- 4. Якорь двигателя М и его обмотка возбуждения ОВ обычно получают питание от разных, независимых друг от
- 5. При установившемся режиме работы двигателя приложенное напряжение U, В, уравновешивается падением напряжения в якорной цепи IR
- 6. Е = kФω, (3.2) где k - коэффициент, зависящий от конструктивных данных двигателя, k = pN/2πa
- 8. Это легко сделать, если учесть, что момент, Н·м, развиваемый двигателем, связан с током якоря и магнитным
- 9. Коэффициент с принимается постоянным, не зависящим от нагрузки, если у двигателя с независимым возбуждением имеется компенсационная
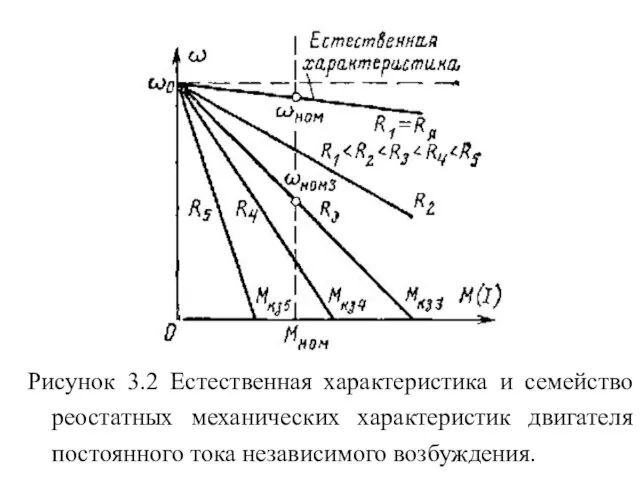
- 10. На рис. 3.2 представлены механические характеристики двигателя независимого возбуждения для различных сопротивлений якорной цепи. Как видно
- 11. При скорости идеального холостого хода ЭДС якоря, направленная навстречу приложенному напряжению, равна ему по абсолютному значению.
- 13. Второй член (3.6) характеризует собой статическое падение угловой скорости (перепад) относительно угловой скорости идеального холостого хода:
- 14. Верхняя характеристика из семейства, приведенного на рис. 3.2, носит название естественной. Естественной характеристикой называется такая характеристика
- 15. Соответственно перепад скорости для естественной характеристики ∆ω =MRЯ/k2Ф2ном. По (3.9) определяется статическое падение скорости для любой
- 16. Если в якорную цепь двигателя включен дополнительный резистор (реостат), то механические характеристики, получаемые при этом, называются
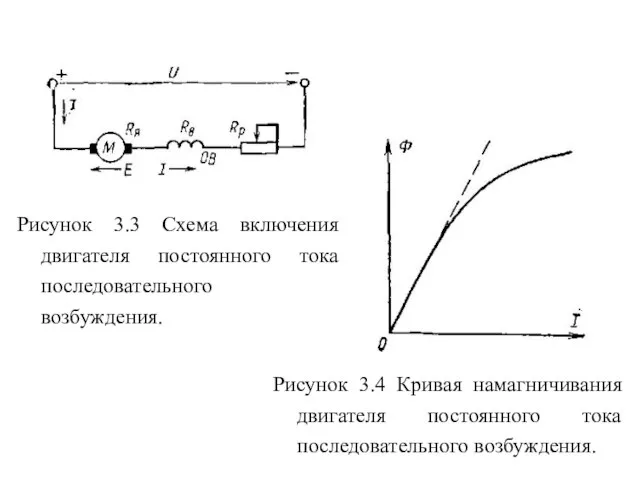
- 18. В отличие от двигателя независимого возбуждения здесь магнитный поток Ф является функцией тока якоря I. Эта
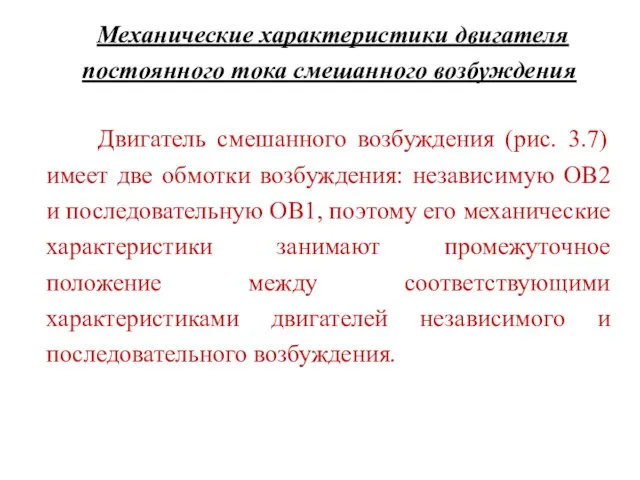
- 21. Значительное увеличение угловой скорости при малых нагрузках обусловливается соответствующим уменьшением магнитного потока. Уравнение (3.13) дает лишь
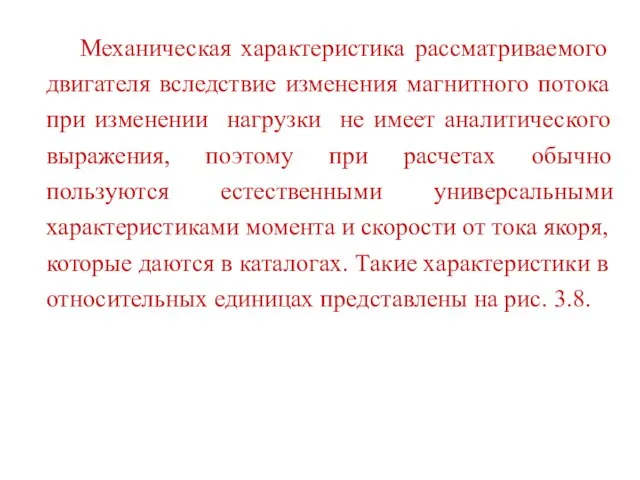
- 23. Механические характеристики двигателя постоянного тока смешанного возбуждения Двигатель смешанного возбуждения (рис. 3.7) имеет две обмотки возбуждения:
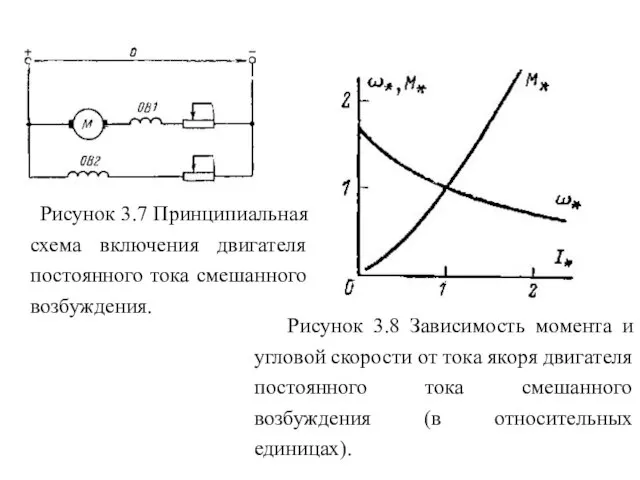
- 24. Механическая характеристика рассматриваемого двигателя вследствие изменения магнитного потока при изменении нагрузки не имеет аналитического выражения, поэтому
- 26. В отличие от двигателя последовательного возбуждения двигатель смешанного возбуждения имеет конечное значение скорости идеально холостого хода.
- 27. Соотношения МДС независимой и последовательной обмоток различны для двигателей разных серий. Наиболее употребительным является соотношение, которое
- 30. Кроме противоЭДС, в обмотке якоря имеется ЭДС Еа, образуемая на активном сопротивлении цепи якоря RЯ при
- 31. Из векторной диаграммы (рис. 3.9, б) видно, что приложенное к двигателю напряжение уравновешивается противоЭДС ЕЯ и
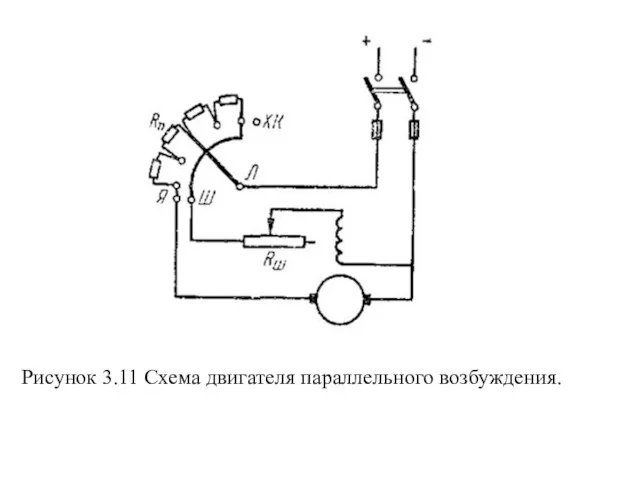
- 34. Двигатель параллельного возбуждения У двигателя параллельного возбуждения, который часто называют шунтовым, обмотку возбуждения включают параллельно якорю.
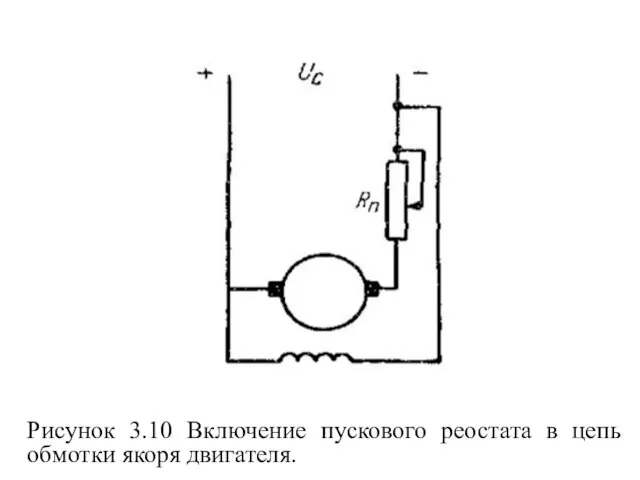
- 35. Большая часть тока проходит по металлической рукоятке реостата на пусковое сопротивление Rп и в обмотку якоря.
- 37. Так как вращающий момент двигателя М=СМIЯФ, то для того, чтобы пусковой момент при пуске был наибольшим,
- 40. При постоянной же нагрузке противоЭДС двигателя EДВ должна оставаться постоянной по величине. Если же увеличить магнитный
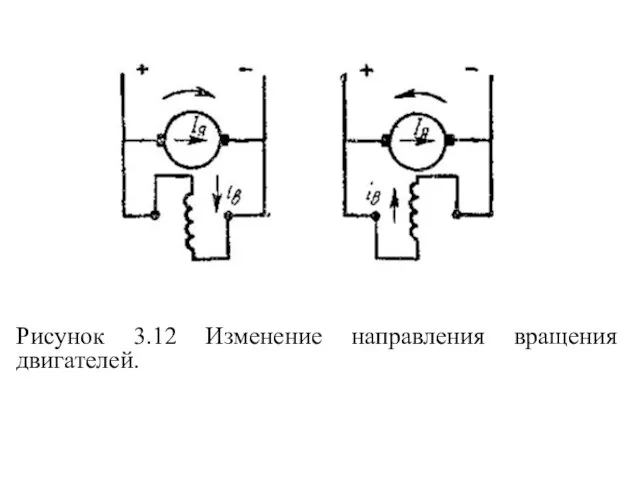
- 42. Если изменить направление тока в обмотке возбуждения, то изменится полярность полюсов, а направление тока в якоре
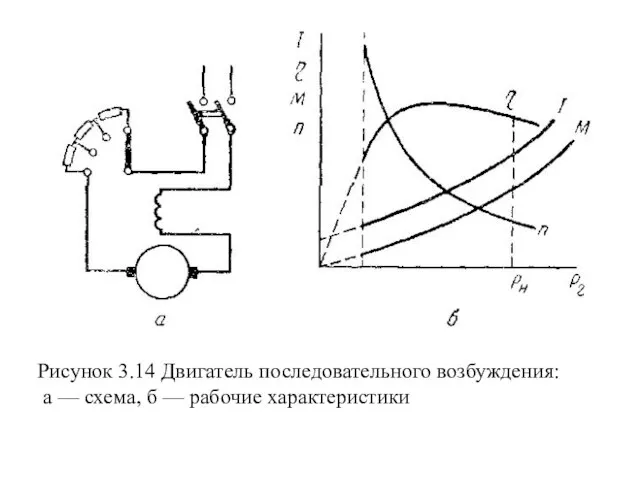
- 44. Свойства двигателя определяют его рабочие характеристики. Рабочими характеристиками называют зависимость скорости вращения n, величины тока I,
- 45. Ток двигателя с увеличением нагрузки возрастает, вращающий момент М также увеличивается почти прямо пропорционально нагрузке. Так
- 46. Двигатель последовательного возбуждения У двигателей последовательного возбуждения, которые часто называются сериесными, обмотки якоря и возбуждения соединены
- 49. Она отличается от формулы (3.17) оборотов двигателя параллельного возбуждения тем, что в ней учитывается также падение
- 50. Как видно из формулы оборотов (3.18), скорость двигателя можно регулировать изменением подводимого напряжения, для этого вместо
- 52. Двигатель смешанного возбуждения Двигатели смешанного возбуждения, которые часто называют компаундными, имеют две обмотки возбуждения, и поэтому
- 54. Знак плюс в формуле соответствует согласному включению обмоток, когда магнитные потоки обмоток складываются. Так в подавляющем
- 55. Знак минус соответствует встречному включению обмотки, когда магнитные потоки обмоток вычитаются. В двигателях нормального исполнения встречное
- 56. Встречное включение обмоток применяют в том случае, когда хотят получить постоянное число оборотов двигателя при изменении
- 58. Скоростная характеристика имеет промежуточное значение между соответствующими кривыми двигателей параллельного и последовательного возбуждения. Скорость двигателей смешанного
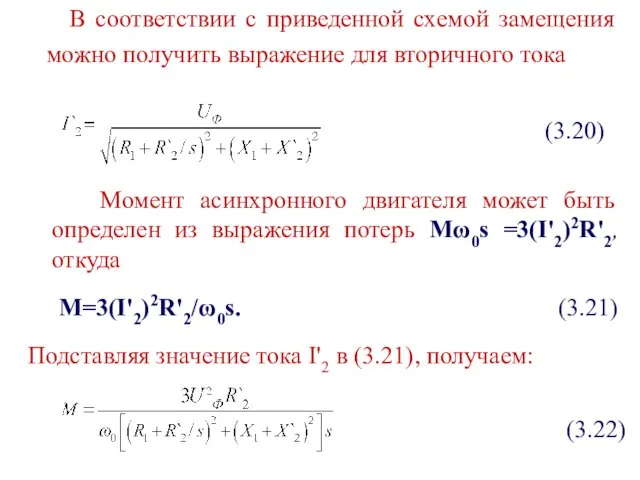
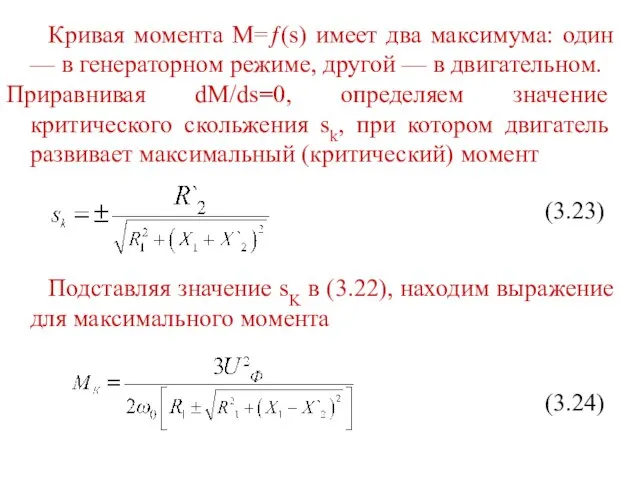
- 59. 3.3 Характеристики трехфазных АД Для вывода уравнения механической характеристики асинхронного двигателя можно воспользоваться упрощенной схемой замещения,
- 70. Эта линейная часть характеристики является ее рабочей частью, на которой двигатель обычно работает в установившемся режиме.
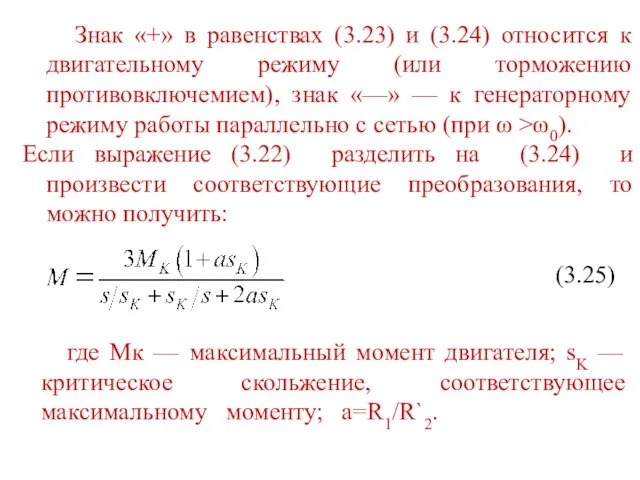
- 73. Более точным является метод, когда спрямление характеристик производится на меньшем участке. Кратность максимального момента λ=MK,Д/MH0М, должна
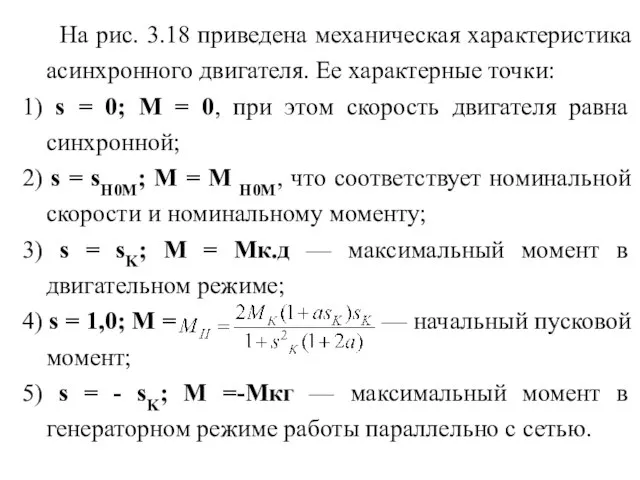
- 74. На рис. 3.21 представлены примерные естественные характеристики двигателя с нормальным короткозамкнутым ротором, имеющим круглые пазы. Эти
- 77. При увеличении скольжения растет ЭДС ротора Е2=I2ks, возрастает ток ротора I'2 в соответствии с (3.20), асимптотически
- 79. Необходимо отметить, что у двигателей с короткозамкнутым ротором пусковой момент практически не всегда является наименьшим значением
- 80. У двигателей с фазным ротором начальный пусковой момент увеличивается по мере возрастания до известных пределов сопротивления
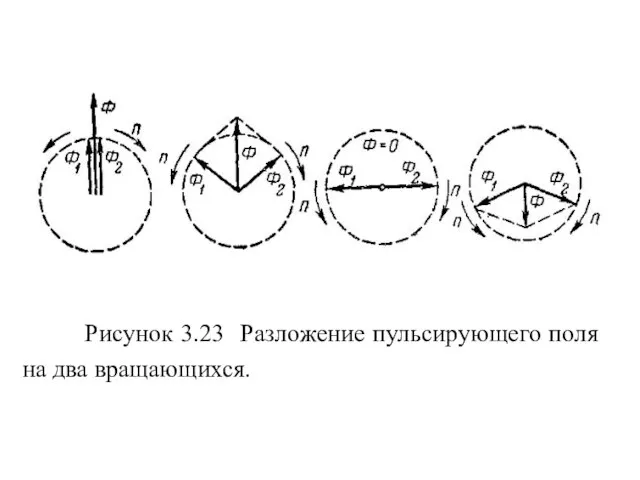
- 82. Такая замена возможна, так как эти два поля Ф1 и Ф2, вращающиеся в разные стороны, создают
- 84. Если же посторонней силой раскрутить ротор двигателя, то он будет вращаться и может быть нагружен. При
- 85. Скорость прямого поля Ф1 относительно ротора равна разности скоростей ноля и ротора n1 – n2= n1
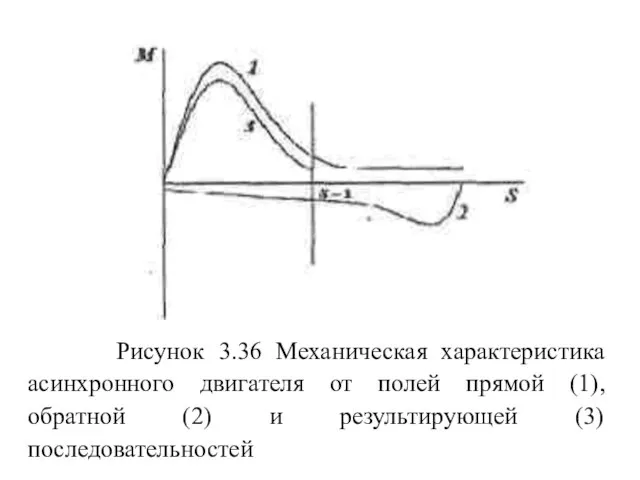
- 86. Рисунок 3.24 Кривые вращающих моментов однофазного двигателя в зависимости от скольжения.
- 87. Ток, индуктируемый прямым полем, взаимодействуя с ним, создает большой вращающий момент, так как активная составляющая этого
- 88. Поскольку обратный момент носит тормозной характер по отношению к прямому, то это приводит к ухудшению характеристик
- 89. Отмеченные выше недостатки трехфазного АД в однофазном режиме в известной мере преодолеваются путем создания в его
- 90. Условием получения кругового вращающегося поля при двух статорных обмотках должно быть равенство по величине их магнитодвижущих
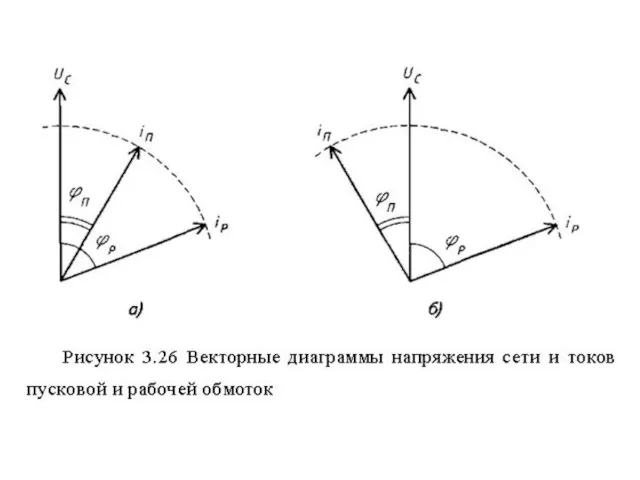
- 91. Схемы пуска АД в однофазном режиме с пульсирующим полем
- 93. Включение резистора приводит к сдвигу вектора тока пусковой обмотки по отношению к вектору тока рабочей обмотки
- 94. 3) перекомпенсировать реактивную мощность, т. е. двигатель с таким конденсатором не только покрывает свои потребности в
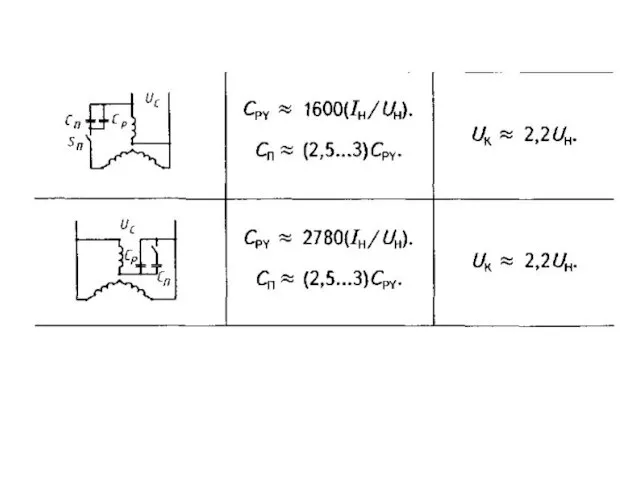
- 95. Приведем сводную таблицу схем соединения фазных обмоток конденсаторного АД, включения рабочего и пускового конденсаторов и приближенных
- 96. Таблица 3.1 Схемы соединения и расчетные формулы конденсаторного АД
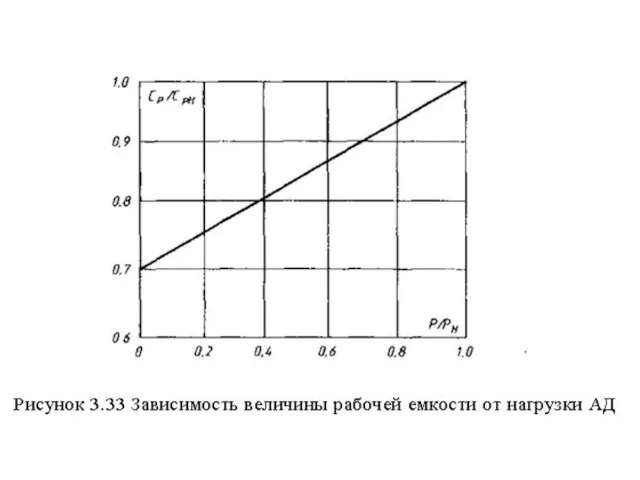
- 98. Особенности работы и эффективное использование конденсаторного АД Зависимость величины емкости рабочего конденсатора от нагрузки на валу
- 99. Например, для Р=0,2РН отношение СР/СРН — 0,75. Это означает, что при такой длительной нагрузке величина рабочей
- 101. Однофазные двигатели Двигатели, которые называют однофазными, имеют на статоре, как правило, две обмотки. Одна из них
- 103. Как видно из этих рисунков, результирующий магнитный поток Фрез перемещается справа налево, т. е. в электродвигателе
- 109. При пульсации нагрузки на валу двигателя в установившемся режиме значение мгновенной скорости колеблется около среднего значения.
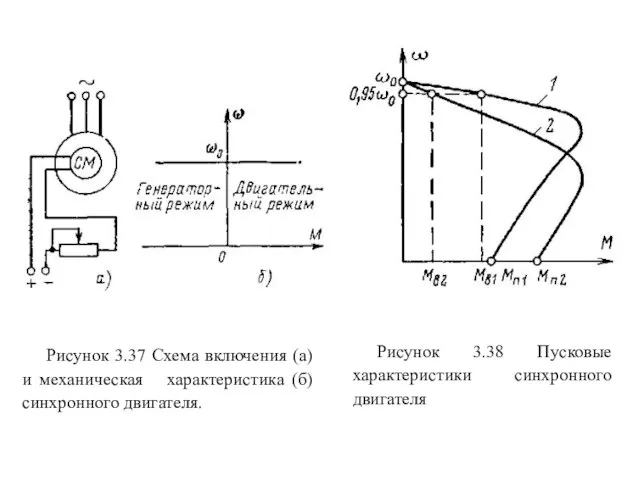
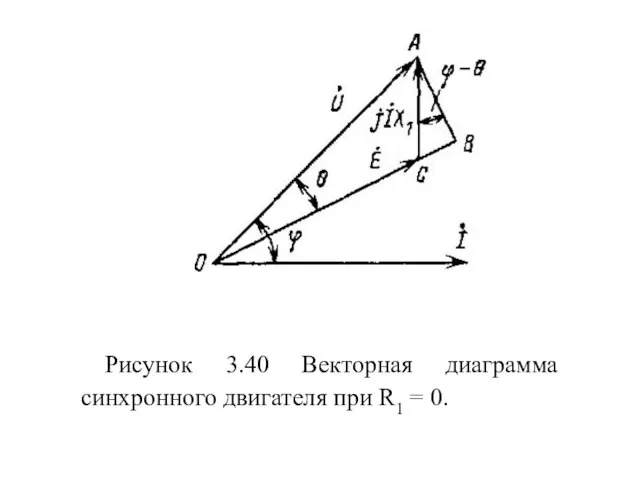
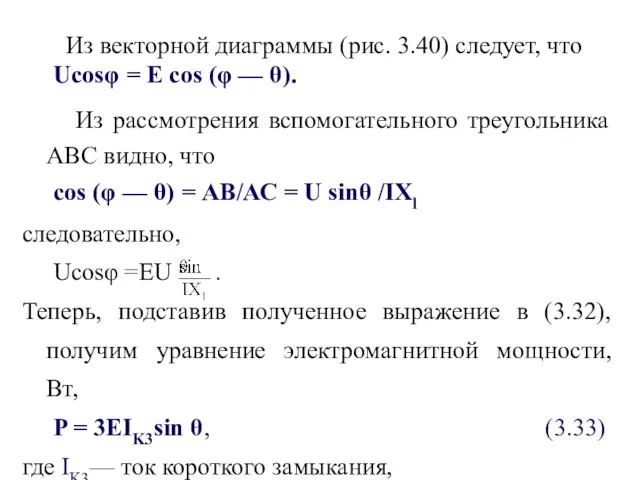
- 110. Если пренебречь потерями в активном сопротивлении статора, считая R1= 0 (рис. 3.40), то подводимая к синхронному
- 115. Номинальному моменту двигателя Мном практически соответствует угол θном = 30…25°. При этом кратность максимального момента к
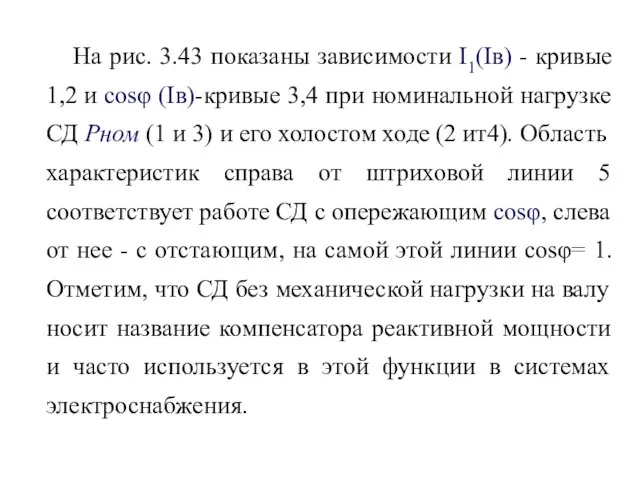
- 116. СИНХРОННЫЙ ДВИГАТЕЛЬ КАК КОМПЕНСАТОР РЕАКТИВНОЙ МОЩНОСТИ Возможность работы СД в качестве источника (компенсатора) реактивной мощности иллюстрируют
- 118. На рис. 3.43 показаны зависимости I1(Iв) - кривые 1,2 и cosφ (Iв)-кривые 3,4 при номинальной нагрузке
- 120. 3) Пуск с ограничением тока через пусковые резисторы, включенные в цепь статора. 4) Пуск с повышением
- 121. Рисунок 3.45 Реверс двигателя осуществляется изменением чередования фаз. При реверсе двигателя в приводе возникают удары от
- 123. 1) Торможение с отдачей энергии в сеть (генераторный режим работы параллельно с сетью) осуществляется в том
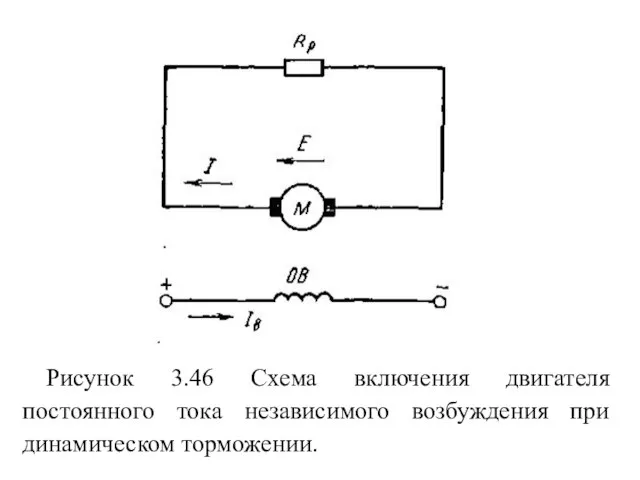
- 124. 2) Динамическое торможение происходит при отключении якоря двигателя от сети и замыкании его на резистор (рис.
- 126. Ток якоря определяется но формуле I = -E/R, (3.40) где R — сопротивление якорной цепи. Тормозной
- 127. 3) Торможение противовключением (генераторный режим работы последовательно с сетью) осуществляется в том случае, когда обмотки двигателя
- 129. При этом ток в якоре, как обычно в двигательном режиме, определяется по формуле I = (U-E)/R.
- 130. Когда момент сопротивления при дальнейшем увеличении груза превысит момент двигателя в неподвижном состоянии, последний начнет вращаться
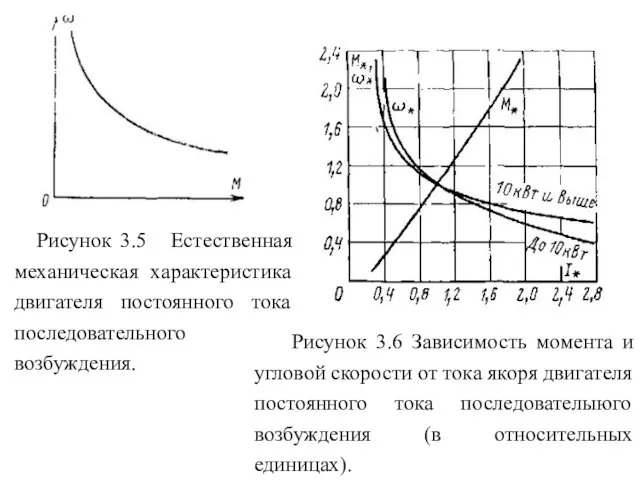
- 131. Механические характеристики двигателя постоянного тока последовательного возбуждения в тормозных режимах Для двигателя последовательного возбуждения возможны два
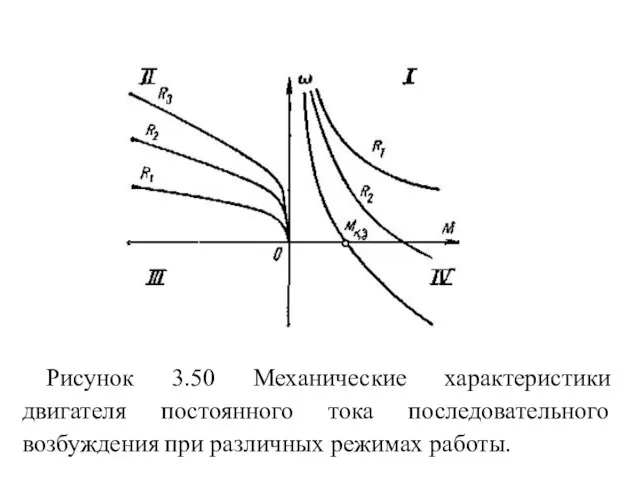
- 132. Механические характеристики для этого торможения являются продолжением характеристик двигательного режима в область отрицательной угловой скорости. Это
- 134. Динамическое торможение двигателя последовательного возбуждения может быть осуществлено двумя способами; с самовозбуждением и с независимым возбуждением.
- 136. Механические характеристики асинхронного двигателя в тормозных режимах. Торможение с отдачей энергии в сеть Механические характеристики асинхронного
- 138. Торможение противовключением Торможение противовключением имеет значительно большее применение на практике. Режим торможения противовключением может быть получен,
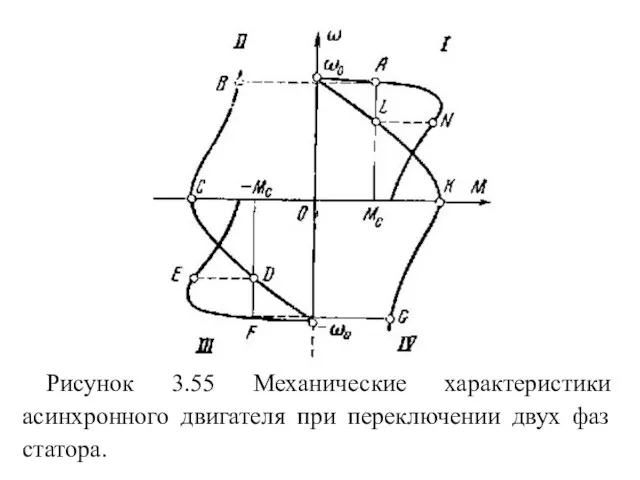
- 139. Торможение противовключением может быть получено также путем переключения на ходу двух фаз обмотки статора, что ведет
- 142. Скачать презентацию
Механические характеристики электродвигателей в процессе работы, пуска и торможения.
1. Характеристики
Механические характеристики электродвигателей в процессе работы, пуска и торможения.
1. Характеристики
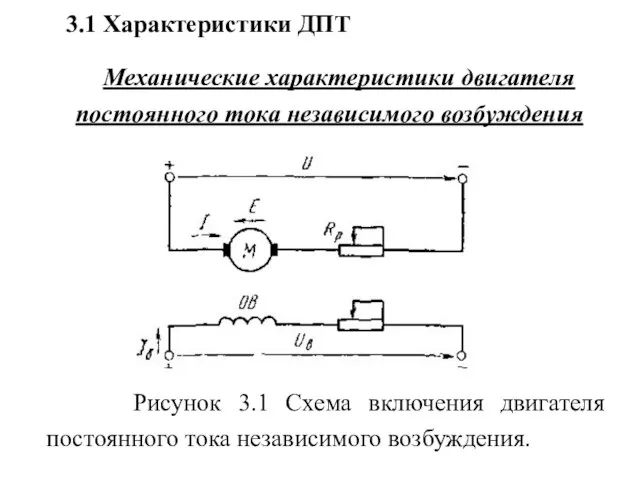
Якорь двигателя М и его обмотка возбуждения ОВ обычно получают
Якорь двигателя М и его обмотка возбуждения ОВ обычно получают
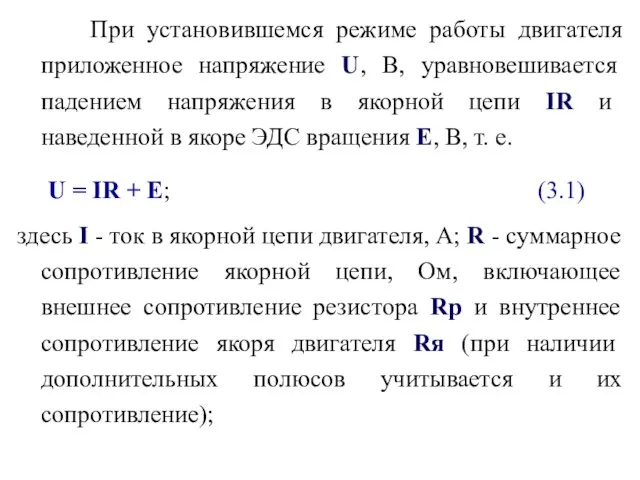
При установившемся режиме работы двигателя приложенное напряжение U, В, уравновешивается
При установившемся режиме работы двигателя приложенное напряжение U, В, уравновешивается
Е = kФω, (3.2)
где k - коэффициент, зависящий от конструктивных
Е = kФω, (3.2)
где k - коэффициент, зависящий от конструктивных
Это легко сделать, если учесть, что момент, Н·м, развиваемый двигателем,
Это легко сделать, если учесть, что момент, Н·м, развиваемый двигателем,
Коэффициент с принимается постоянным, не зависящим от нагрузки, если у
Коэффициент с принимается постоянным, не зависящим от нагрузки, если у
На рис. 3.2 представлены механические характеристики двигателя независимого возбуждения для
На рис. 3.2 представлены механические характеристики двигателя независимого возбуждения для
При скорости идеального холостого хода ЭДС якоря, направленная навстречу приложенному
При скорости идеального холостого хода ЭДС якоря, направленная навстречу приложенному
Второй член (3.6) характеризует собой статическое падение угловой скорости (перепад)
Второй член (3.6) характеризует собой статическое падение угловой скорости (перепад)
Верхняя характеристика из семейства, приведенного на рис. 3.2, носит название
Верхняя характеристика из семейства, приведенного на рис. 3.2, носит название
Соответственно перепад скорости для естественной характеристики
∆ω =MRЯ/k2Ф2ном.
По (3.9)
Соответственно перепад скорости для естественной характеристики
∆ω =MRЯ/k2Ф2ном.
По (3.9)
Если в якорную цепь двигателя включен дополнительный резистор (реостат), то
Если в якорную цепь двигателя включен дополнительный резистор (реостат), то
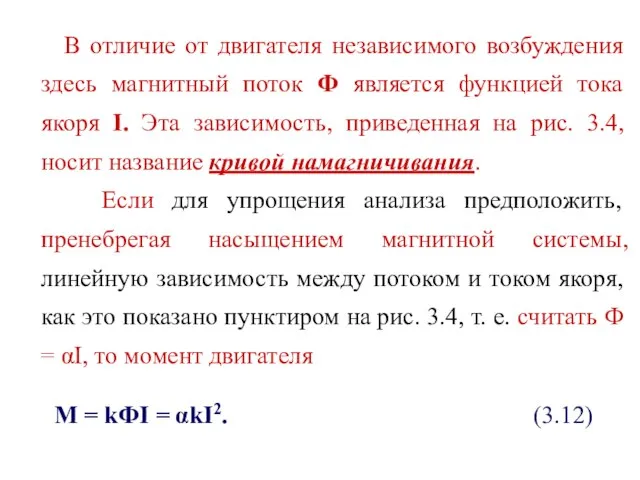
В отличие от двигателя независимого возбуждения здесь магнитный поток Ф
В отличие от двигателя независимого возбуждения здесь магнитный поток Ф
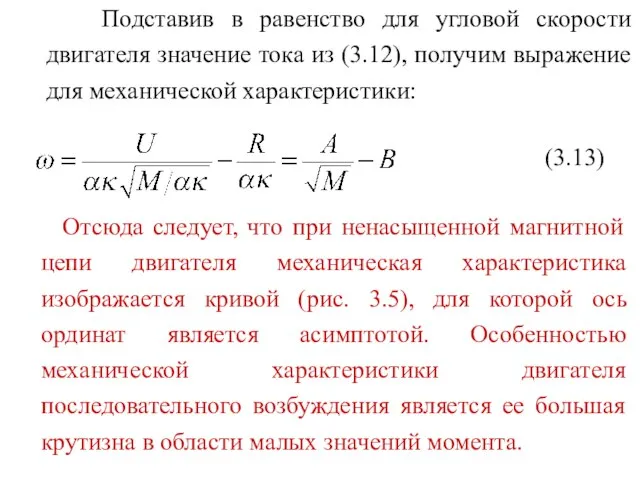
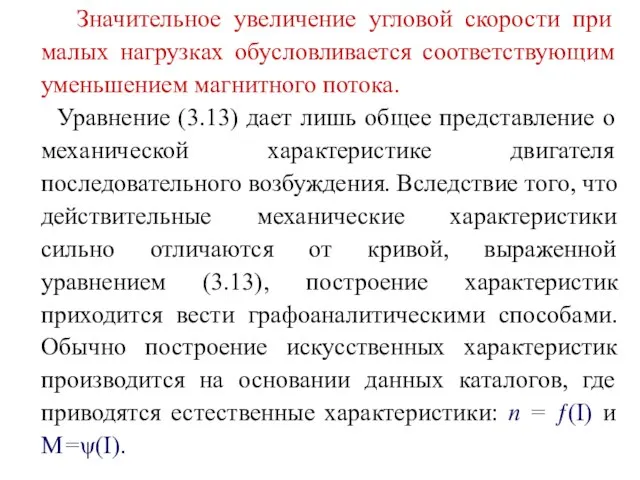
Значительное увеличение угловой скорости при малых нагрузках обусловливается соответствующим уменьшением
Значительное увеличение угловой скорости при малых нагрузках обусловливается соответствующим уменьшением
Механические характеристики двигателя постоянного тока смешанного возбуждения
Двигатель смешанного возбуждения
Механические характеристики двигателя постоянного тока смешанного возбуждения
Двигатель смешанного возбуждения
Механическая характеристика рассматриваемого двигателя вследствие изменения магнитного потока при изменении
Механическая характеристика рассматриваемого двигателя вследствие изменения магнитного потока при изменении
В отличие от двигателя последовательного возбуждения двигатель смешанного возбуждения имеет
В отличие от двигателя последовательного возбуждения двигатель смешанного возбуждения имеет
Соотношения МДС независимой и последовательной обмоток различны для двигателей разных
Соотношения МДС независимой и последовательной обмоток различны для двигателей разных
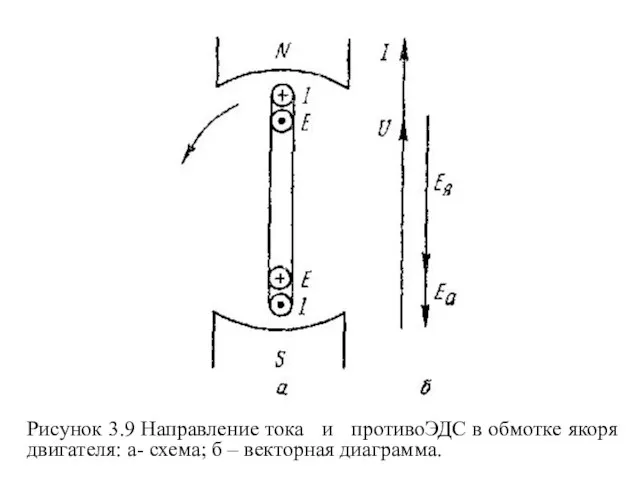
Кроме противоЭДС, в обмотке якоря имеется ЭДС Еа, образуемая на
Кроме противоЭДС, в обмотке якоря имеется ЭДС Еа, образуемая на
Из векторной диаграммы (рис. 3.9, б) видно, что приложенное к
Из векторной диаграммы (рис. 3.9, б) видно, что приложенное к
Двигатель параллельного возбуждения
У двигателя параллельного возбуждения, который часто называют
Двигатель параллельного возбуждения
У двигателя параллельного возбуждения, который часто называют
Большая часть тока проходит по металлической рукоятке реостата на пусковое
Большая часть тока проходит по металлической рукоятке реостата на пусковое
Так как вращающий момент двигателя М=СМIЯФ, то для того, чтобы
Так как вращающий момент двигателя М=СМIЯФ, то для того, чтобы
При постоянной же нагрузке противоЭДС двигателя EДВ должна оставаться постоянной
При постоянной же нагрузке противоЭДС двигателя EДВ должна оставаться постоянной
Если изменить направление тока в обмотке возбуждения, то изменится полярность
Если изменить направление тока в обмотке возбуждения, то изменится полярность
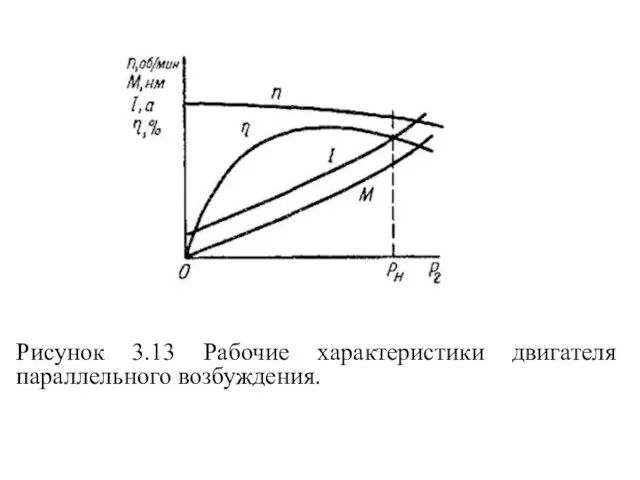
Свойства двигателя определяют его рабочие характеристики.
Рабочими характеристиками называют зависимость
Свойства двигателя определяют его рабочие характеристики.
Рабочими характеристиками называют зависимость
Ток двигателя с увеличением нагрузки возрастает, вращающий момент М также
Ток двигателя с увеличением нагрузки возрастает, вращающий момент М также
Двигатель последовательного возбуждения
У двигателей последовательного возбуждения, которые часто называются
Двигатель последовательного возбуждения
У двигателей последовательного возбуждения, которые часто называются
Она отличается от формулы (3.17) оборотов двигателя параллельного возбуждения тем,
Она отличается от формулы (3.17) оборотов двигателя параллельного возбуждения тем,
Как видно из формулы оборотов (3.18), скорость двигателя можно регулировать
Как видно из формулы оборотов (3.18), скорость двигателя можно регулировать

Двигатель смешанного возбуждения
Двигатели смешанного возбуждения, которые часто называют компаундными,
Двигатель смешанного возбуждения
Двигатели смешанного возбуждения, которые часто называют компаундными,
Знак плюс в формуле соответствует согласному включению обмоток, когда магнитные
Знак плюс в формуле соответствует согласному включению обмоток, когда магнитные
Знак минус соответствует встречному включению обмотки, когда магнитные потоки обмоток
Знак минус соответствует встречному включению обмотки, когда магнитные потоки обмоток
Встречное включение обмоток применяют в том случае, когда хотят получить
Встречное включение обмоток применяют в том случае, когда хотят получить

Скоростная характеристика имеет промежуточное значение между соответствующими кривыми двигателей параллельного
Скоростная характеристика имеет промежуточное значение между соответствующими кривыми двигателей параллельного
3.3 Характеристики трехфазных АД
Для вывода уравнения механической характеристики асинхронного
3.3 Характеристики трехфазных АД
Для вывода уравнения механической характеристики асинхронного


Эта линейная часть характеристики является ее рабочей частью, на которой
Эта линейная часть характеристики является ее рабочей частью, на которой

Более точным является метод, когда спрямление характеристик производится на меньшем
Более точным является метод, когда спрямление характеристик производится на меньшем
На рис. 3.21 представлены примерные естественные характеристики двигателя с нормальным
На рис. 3.21 представлены примерные естественные характеристики двигателя с нормальным
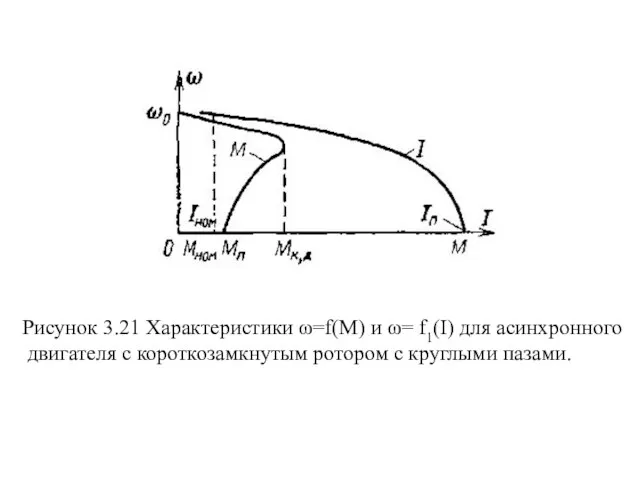

При увеличении скольжения растет ЭДС ротора Е2=I2ks, возрастает ток ротора
При увеличении скольжения растет ЭДС ротора Е2=I2ks, возрастает ток ротора
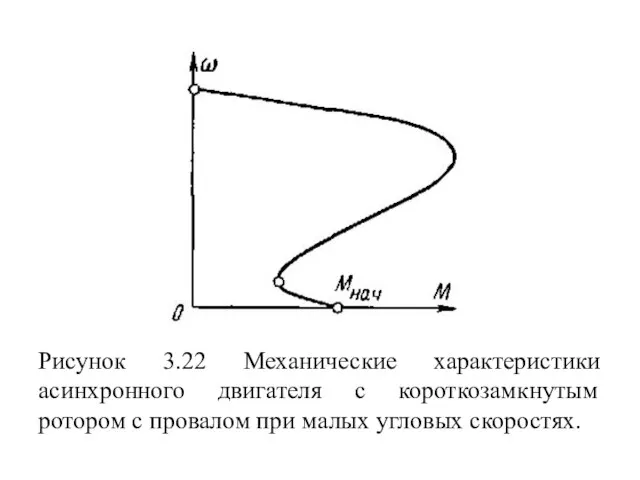
Необходимо отметить, что у двигателей с короткозамкнутым ротором пусковой момент
Необходимо отметить, что у двигателей с короткозамкнутым ротором пусковой момент
У двигателей с фазным ротором начальный пусковой момент увеличивается по
У двигателей с фазным ротором начальный пусковой момент увеличивается по
Такая замена возможна, так как эти два поля Ф1 и
Такая замена возможна, так как эти два поля Ф1 и
Если же посторонней силой раскрутить ротор двигателя, то он будет
Если же посторонней силой раскрутить ротор двигателя, то он будет
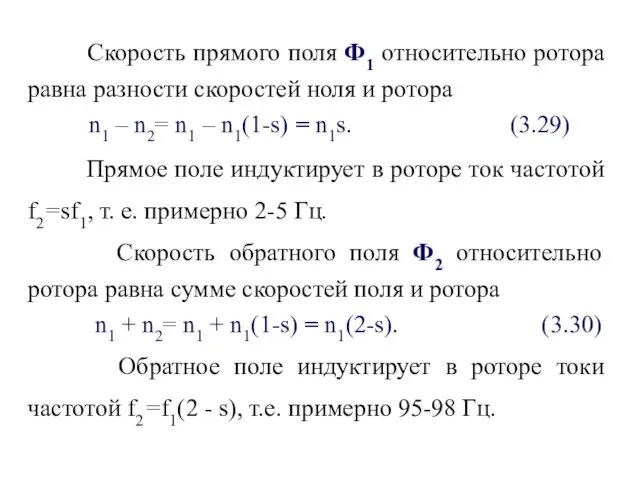
Скорость прямого поля Ф1 относительно ротора равна разности скоростей ноля
Скорость прямого поля Ф1 относительно ротора равна разности скоростей ноля
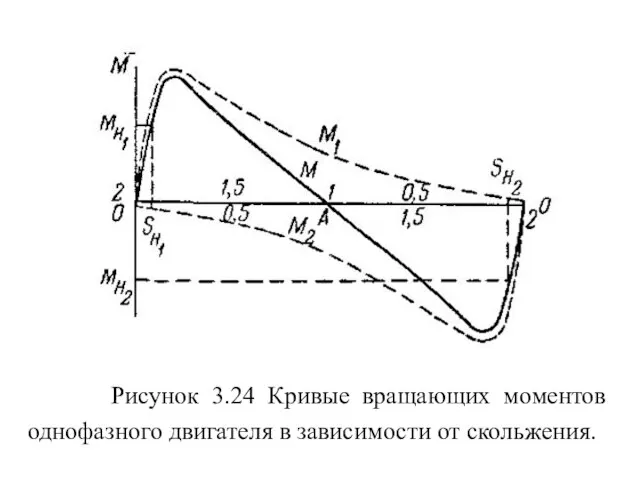
Рисунок 3.24 Кривые вращающих моментов однофазного двигателя в зависимости от
Рисунок 3.24 Кривые вращающих моментов однофазного двигателя в зависимости от
Ток, индуктируемый прямым полем, взаимодействуя с ним, создает большой вращающий
Ток, индуктируемый прямым полем, взаимодействуя с ним, создает большой вращающий
Поскольку обратный момент носит тормозной характер по отношению к прямому,
Поскольку обратный момент носит тормозной характер по отношению к прямому,
Отмеченные выше недостатки трехфазного АД в однофазном режиме в известной
Отмеченные выше недостатки трехфазного АД в однофазном режиме в известной
Условием получения кругового вращающегося поля при двух статорных обмотках должно
Условием получения кругового вращающегося поля при двух статорных обмотках должно
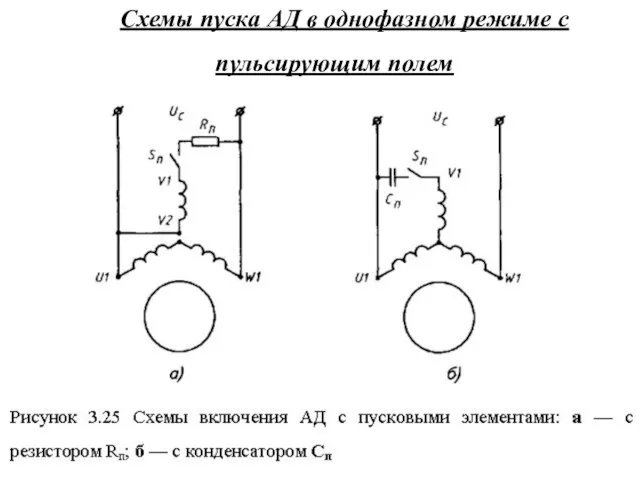
Схемы пуска АД в однофазном режиме с пульсирующим полем
Схемы пуска АД в однофазном режиме с пульсирующим полем
Включение резистора приводит к сдвигу вектора тока пусковой обмотки по
Включение резистора приводит к сдвигу вектора тока пусковой обмотки по
3) перекомпенсировать реактивную мощность, т. е. двигатель с таким конденсатором не
3) перекомпенсировать реактивную мощность, т. е. двигатель с таким конденсатором не
Приведем сводную таблицу схем соединения фазных обмоток конденсаторного АД, включения
Приведем сводную таблицу схем соединения фазных обмоток конденсаторного АД, включения
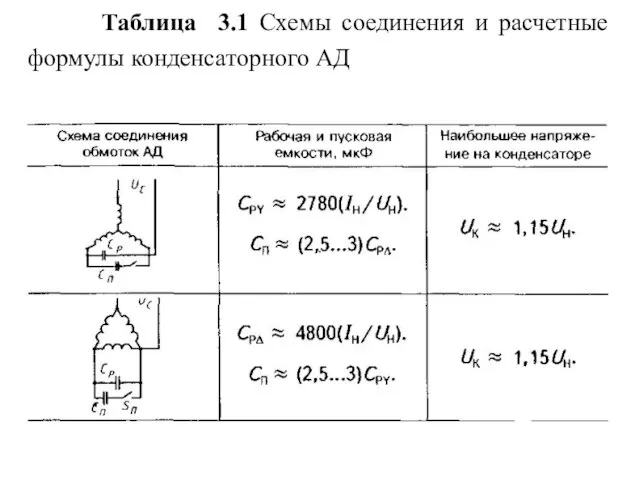
Таблица 3.1 Схемы соединения и расчетные формулы конденсаторного АД
Таблица 3.1 Схемы соединения и расчетные формулы конденсаторного АД
Особенности работы и эффективное использование конденсаторного АД
Зависимость величины емкости
Особенности работы и эффективное использование конденсаторного АД
Зависимость величины емкости
Например, для Р=0,2РН отношение СР/СРН — 0,75. Это означает, что
Например, для Р=0,2РН отношение СР/СРН — 0,75. Это означает, что
Однофазные двигатели
Двигатели, которые называют однофазными, имеют на статоре, как
Однофазные двигатели
Двигатели, которые называют однофазными, имеют на статоре, как
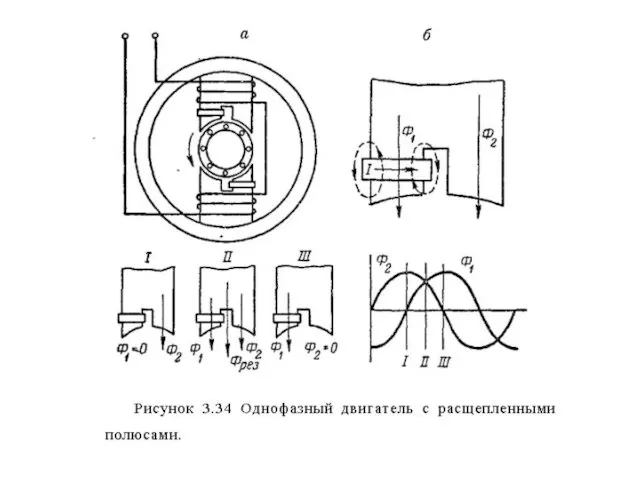
Как видно из этих рисунков, результирующий магнитный поток Фрез перемещается
Как видно из этих рисунков, результирующий магнитный поток Фрез перемещается

При пульсации нагрузки на валу двигателя в установившемся режиме значение
При пульсации нагрузки на валу двигателя в установившемся режиме значение
Если пренебречь потерями в активном сопротивлении статора, считая R1= 0
Если пренебречь потерями в активном сопротивлении статора, считая R1= 0

Номинальному моменту двигателя Мном практически соответствует угол θном = 30…25°.
Номинальному моменту двигателя Мном практически соответствует угол θном = 30…25°.
СИНХРОННЫЙ ДВИГАТЕЛЬ КАК КОМПЕНСАТОР РЕАКТИВНОЙ МОЩНОСТИ
Возможность работы СД в качестве
СИНХРОННЫЙ ДВИГАТЕЛЬ КАК КОМПЕНСАТОР РЕАКТИВНОЙ МОЩНОСТИ
Возможность работы СД в качестве
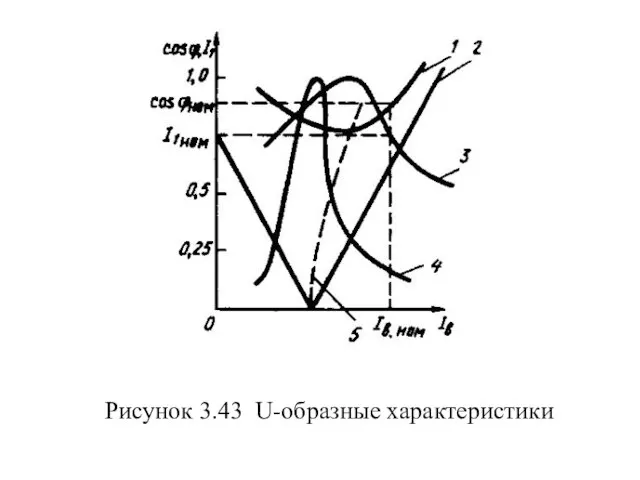
На рис. 3.43 показаны зависимости I1(Iв) - кривые 1,2 и
На рис. 3.43 показаны зависимости I1(Iв) - кривые 1,2 и
3) Пуск с ограничением тока через пусковые резисторы, включенные в цепь
3) Пуск с ограничением тока через пусковые резисторы, включенные в цепь
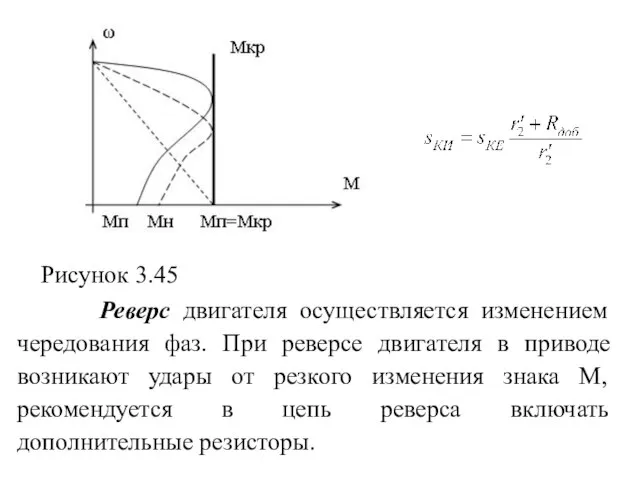
Рисунок 3.45
Реверс двигателя осуществляется изменением чередования фаз. При реверсе
Рисунок 3.45
Реверс двигателя осуществляется изменением чередования фаз. При реверсе
1) Торможение с отдачей энергии в сеть (генераторный режим работы параллельно
1) Торможение с отдачей энергии в сеть (генераторный режим работы параллельно
2) Динамическое торможение происходит при отключении якоря двигателя от сети
2) Динамическое торможение происходит при отключении якоря двигателя от сети
Ток якоря определяется но формуле
I = -E/R, (3.40)
где R
Ток якоря определяется но формуле
I = -E/R, (3.40)
где R
3) Торможение противовключением (генераторный режим работы последовательно с сетью) осуществляется
3) Торможение противовключением (генераторный режим работы последовательно с сетью) осуществляется

При этом ток в якоре, как обычно в двигательном режиме,
При этом ток в якоре, как обычно в двигательном режиме,
Когда момент сопротивления при дальнейшем увеличении груза превысит момент двигателя
Когда момент сопротивления при дальнейшем увеличении груза превысит момент двигателя
Механические характеристики двигателя постоянного тока последовательного возбуждения в тормозных режимах
Механические характеристики двигателя постоянного тока последовательного возбуждения в тормозных режимах
Механические характеристики для этого торможения являются продолжением характеристик двигательного режима
Механические характеристики для этого торможения являются продолжением характеристик двигательного режима
Динамическое торможение двигателя последовательного возбуждения может быть осуществлено двумя способами;
Динамическое торможение двигателя последовательного возбуждения может быть осуществлено двумя способами;

Механические характеристики
асинхронного двигателя в тормозных режимах.
Торможение с отдачей энергии в
Механические характеристики
асинхронного двигателя в тормозных режимах.
Торможение с отдачей энергии в

Торможение противовключением
Торможение противовключением имеет значительно большее применение на практике.
Торможение противовключением
Торможение противовключением имеет значительно большее применение на практике.
Торможение противовключением может быть получено также путем переключения на ходу
Торможение противовключением может быть получено также путем переключения на ходу
 Управління режимом роботи фрагменту електричної мережі напругою 110/35 кВ Києво-Святошинського РП в умовах його експлуатації
Управління режимом роботи фрагменту електричної мережі напругою 110/35 кВ Києво-Святошинського РП в умовах його експлуатації Радиоактивный распад атомных ядер. (Тема 1.2)
Радиоактивный распад атомных ядер. (Тема 1.2) Презентация Электробезопасность Опасности электрических систем
Презентация Электробезопасность Опасности электрических систем  Nəbi Xəzri
Nəbi Xəzri Звукові Хвилі Виконав учень 10 класу Васильківської ЗОШ І-ІІІ ступенів №9 Вінтула Богдан
Звукові Хвилі Виконав учень 10 класу Васильківської ЗОШ І-ІІІ ступенів №9 Вінтула Богдан  Плоские волны
Плоские волны Подшипники. Конструкция подшипника скольжения
Подшипники. Конструкция подшипника скольжения Решение задач
Решение задач Опиливание заготовок их сортового проката
Опиливание заготовок их сортового проката Испарение и конденсация
Испарение и конденсация Загальне знання повітряних суден. Планер літального апарата
Загальне знання повітряних суден. Планер літального апарата Оптика. Линзы
Оптика. Линзы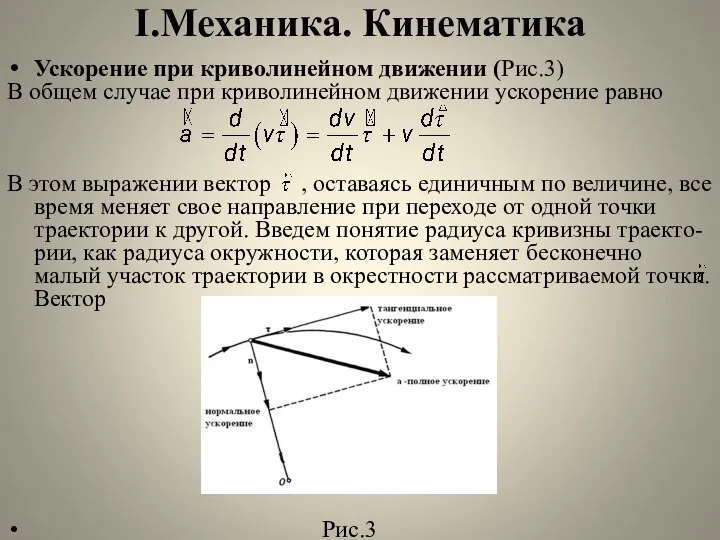 I.Механика. Кинематика
I.Механика. Кинематика Электричество. Постоянный ток
Электричество. Постоянный ток Введение в динамику системы. Масса. Центр масс. Моменты инерции
Введение в динамику системы. Масса. Центр масс. Моменты инерции Основные понятия и определения
Основные понятия и определения Динамика материальной точки (частицы)
Динамика материальной точки (частицы) Презентация по физике "усилители" - скачать
Презентация по физике "усилители" - скачать  Синхронды машиналар
Синхронды машиналар Электрический двигатель своими руками
Электрический двигатель своими руками Жылулық құбылыстар
Жылулық құбылыстар Схема системы технического обслуживания и ремонта
Схема системы технического обслуживания и ремонта Закон Максвелла. Электромагнитное поле
Закон Максвелла. Электромагнитное поле Електростатика. Закон взаємодії електричних зарядів
Електростатика. Закон взаємодії електричних зарядів Крыло. Его назначение
Крыло. Его назначение Внутрицентровое поглощение света на примесных уровнях в ИК-диапазоне
Внутрицентровое поглощение света на примесных уровнях в ИК-диапазоне Конденсатори
Конденсатори  Определение технического состояния трансмиссии автомобилей
Определение технического состояния трансмиссии автомобилей