- Механика электропривода

Содержание
- 2. МЕХАНИКА ЭЛЕКТРОПРИВОДА В механическом движении элементов электропривода (ЭП) участвуют ротор электродвигателя, элементы механической передачи и исполнительный
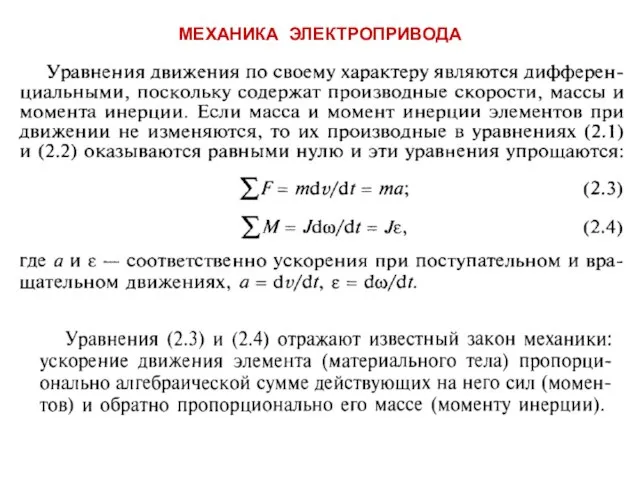
- 3. МЕХАНИКА ЭЛЕКТРОПРИВОДА
- 4. МЕХАНИКА ЭЛЕКТРОПРИВОДА
- 5. 2.1. Уравнение движения электропривода Рассмотрим простейшую механическую систему, состоящую из ротора электродвигателя и непосредственно связанной с
- 6. Рис. 2.1. Модель механической части электропривода
- 7. В системе на рис. 2.1 действуют два момента - электромагнитный момент М, развиваемый двигателем, и момент
- 8. Правая часть уравнения (2.1) - динамический момент который возникает, если алгебраическая сумма моментов М и Мс
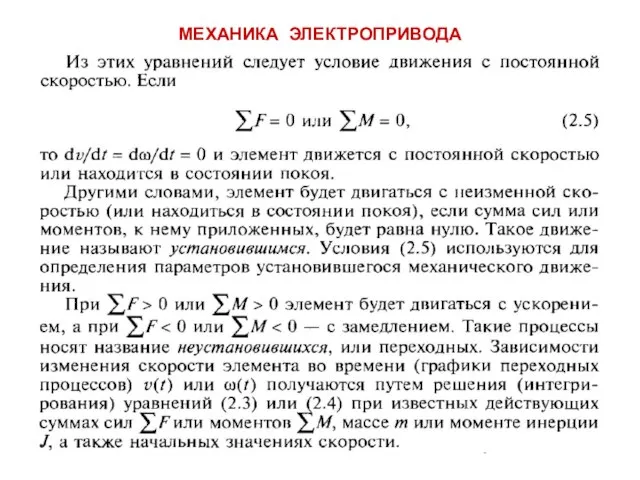
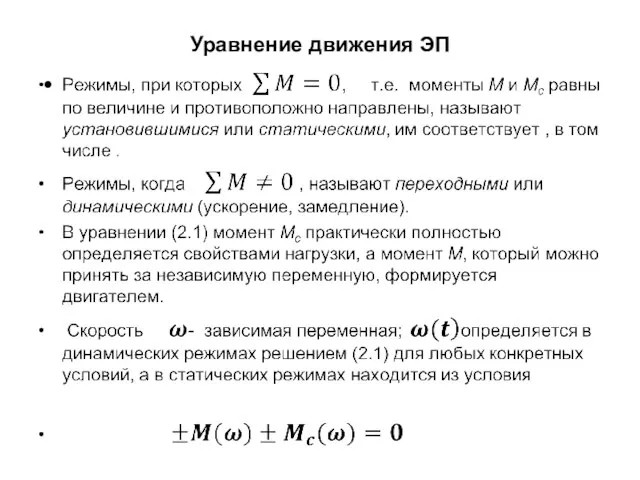
- 9. Состояние привода определяется знаком и значением динамического момента Мдин. При Мдин=0 привод имеет постоянную скорость или
- 10. УРАВНЕНИЕ ДВИЖЕНИЯ ЭЛЕКТРОПРИВОДА
- 11. УРАВНЕНИЕ ДВИЖЕНИЯ ЭЛЕКТРОПРИВОДА
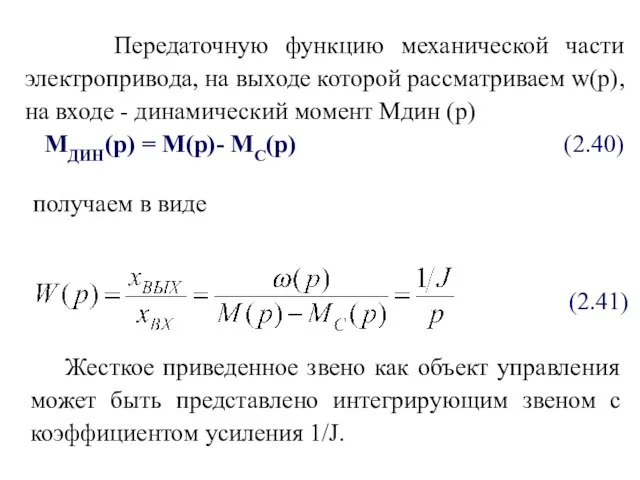
- 12. Уравнение движения ЭП
- 13. 2.2 Приведение моментов сопротивления и моментов инерции Обычно между двигателем и нагрузкой находится какая-либо механическая передача,
- 14. 2.2 Приведение моментов сопротивления и моментов инерции Рис. 2.2. приведение Мсм и Jнагр к валу двигателя
- 15. 2.2 Приведение моментов сопротивления и моментов инерции
- 16. Приведение моментов сопротивления
- 17. ПРИВЕДЕНИЕ МОМЕНТОВ ИНЕРЦИИ
- 18. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ Моменты М и Мс могут зависеть от времени, от положения, от скорости. Эти зависимости
- 19. Рис. 2.3. Пример механических характеристик
- 20. МОМЕНТЫ, ДЕЙСТВУЮЩИЕ В ЭП Моменты принято делить на активные и реактивные. Активные моменты могут быть как
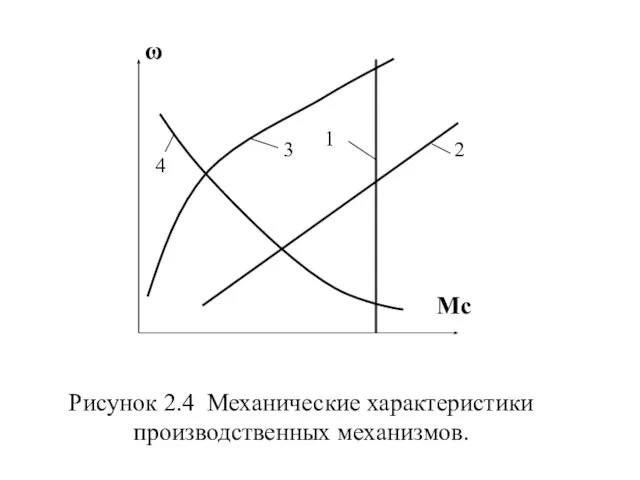
- 21. Рис. 2.4. Механические характеристики с различной жесткостью Механические характеристики принято оценивать их жесткостью . Они бывают
- 22. Классификация механических характеристик рабочих машин и электродвигателей Зависимость между приведенными к валу двигателя скоростью и моментом
- 24. Приведенная формула позволяет классифицировать механические характеристики производственных механизмов ориентировочно на следующие основные категории: 1. Не зависящая
- 25. 2. Линейно-возрастающая механическая характеристика (прямая 2 па рис. 2.4). В этом случае х = 1 и
- 26. 4. Нелинейно-спадающая механическая характеристика (кривая 4 на рис. 2.4). При этом х =-1 и момент сопротивления
- 28. Механической характеристикой электродвигателя называется зависимость его угловой скорости от вращающего момента, т.е. ω=f(M). Почти все электродвигатели
- 31. Механические характеристики электродвигателей можно разделить на четыре основные категории: 1.Абсолютно жесткая механическая характеристика ( ) -
- 32. Жесткой механической характеристикой обладают двигатели постоянного тока независимого возбуждения, а также асинхронные двигатели в пределах рабочей
- 33. 3. Мягкая механическая характеристика — это характеристика, при которой с изменением момента скорость значительно изменяется. Такой
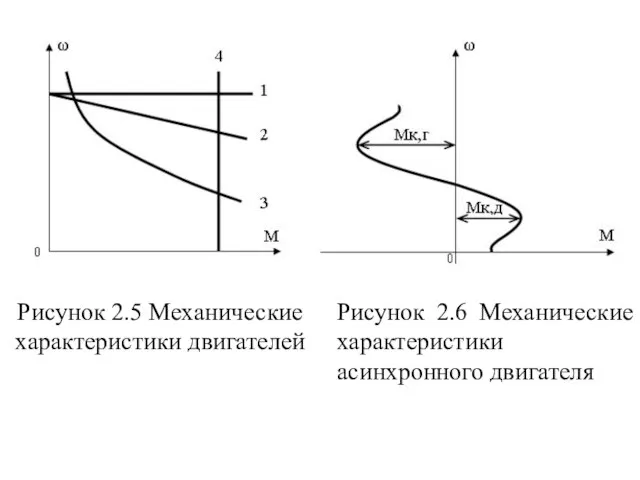
- 34. 4. Абсолютно мягкая механическая характеристика (β=0) - это характеристика, при которой момент двигателя с изменением угловой
- 36. Кинематические схемы и параметры механической части ЭП Основная задача электропривода - приведение в движение исполнительных механизмов
- 37. Кинематические схемы конкретных электроприводов бесконечно многообразны, однако обладают общими особенностями: 1. Простейшим примером может служить кинематическая
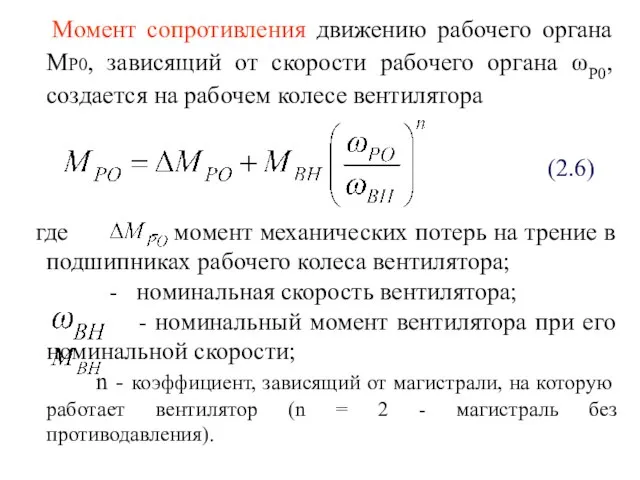
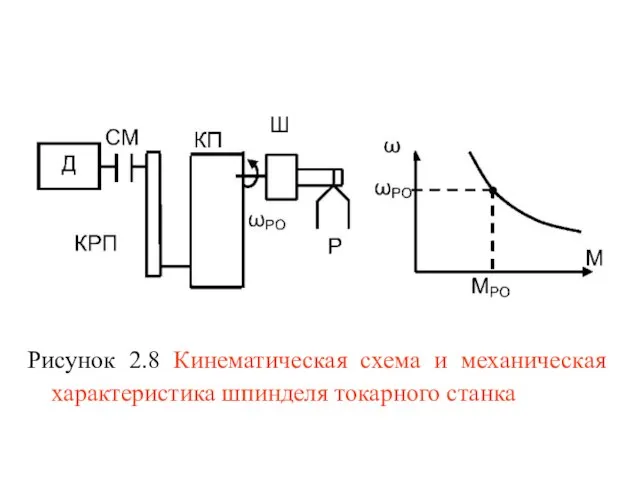
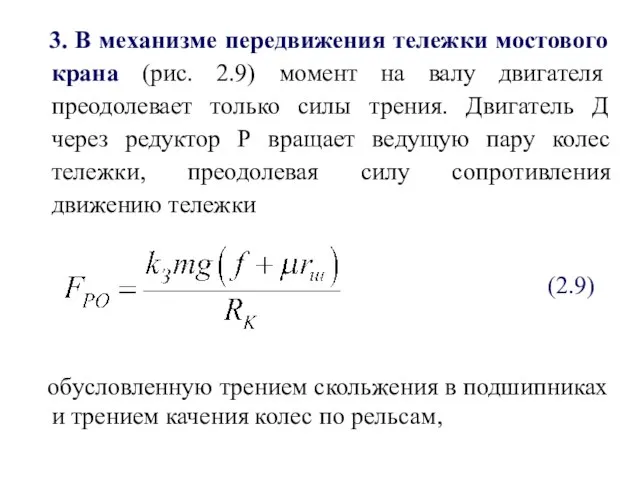
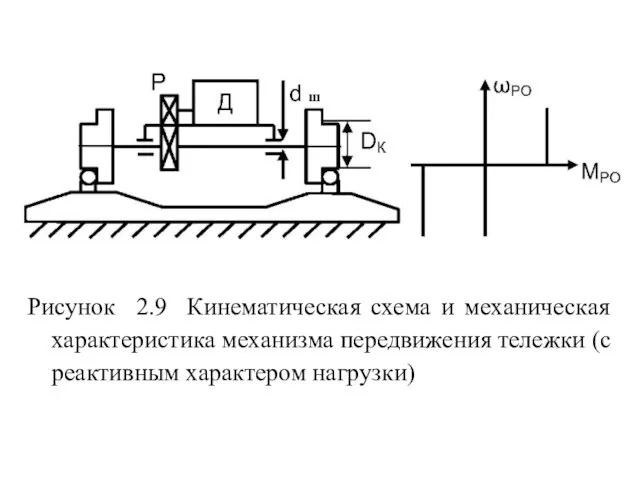
- 40. 2. В кинематическую схему привода шпинделя токарного станка (рис. 2.8) введена клиноременная передача КРП и коробка
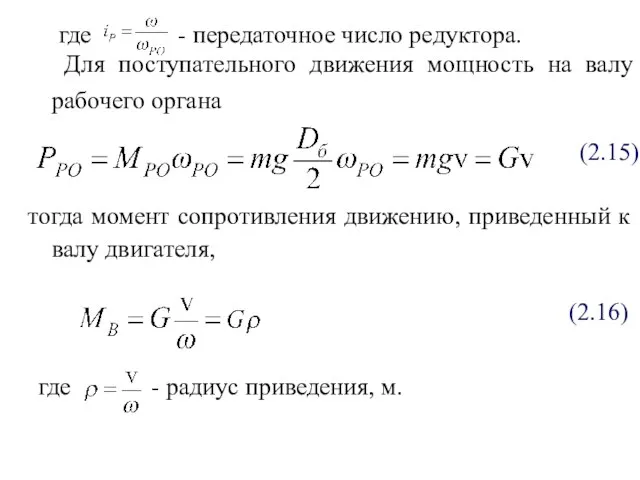
- 41. По требованиям технологии обработка деталей ведется в режиме постоянства мощности Pz = MZ • ωРО =
- 46. Из формулы (2.9) следует, что модуль силы трения не зависит от скорости вращения рабочего органа. Приведенная
- 47. ω1
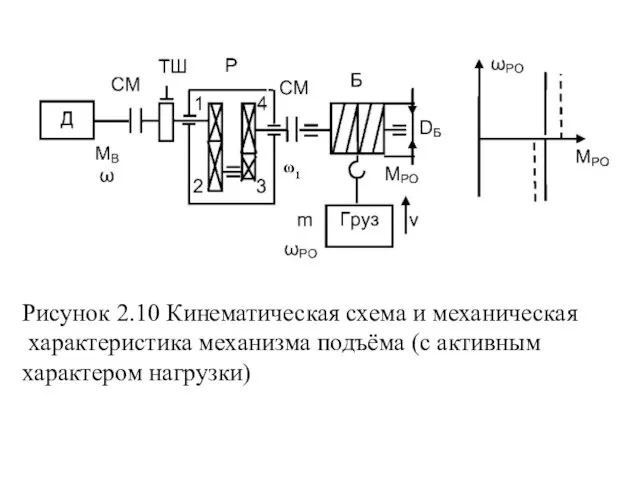
- 48. Кроме силы тяжести двигатель преодолевает силы трения в подшипниках и зубчатых зацеплениях редуктора (пунктирные линии на
- 49. При многообразии кинематических схем рабочего органа по отношению к электроприводу они обладают следующими особенностями: реверсивные или
- 50. моменты сопротивления могут иметь характер активный (энергия поступает от другого источника или имеется запас потенциальной энергии)
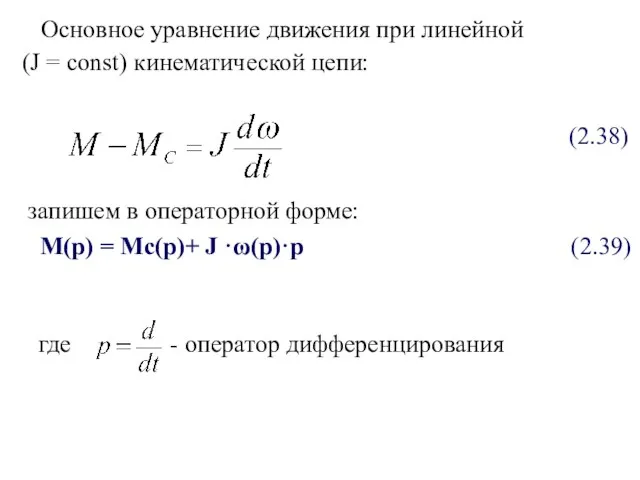
- 51. 2.4 Расчетные схемы механической части электропривода Кинематическая схема дает представление об идеальных кинематических связях между движущимися
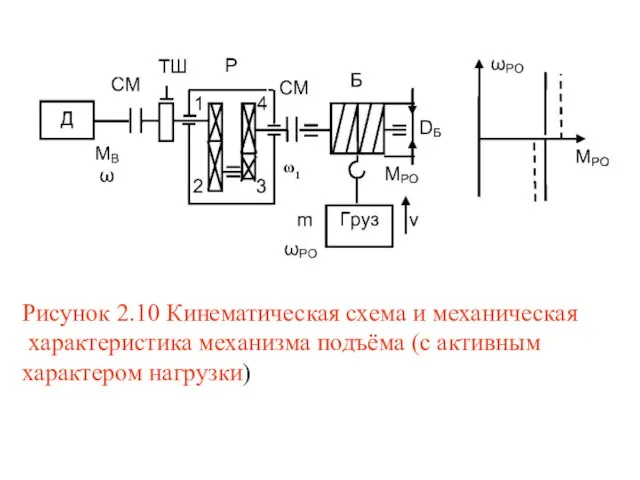
- 52. Приведение моментов сопротивления движению к валу двигателя. Критерием приведения моментов сопротивления движению к валу двигателя является
- 53. ω1
- 56. Приведение моментов инерции к валу двигателя. Критерием приведения является равенство запаса кинетической энергии реальной и расчетной
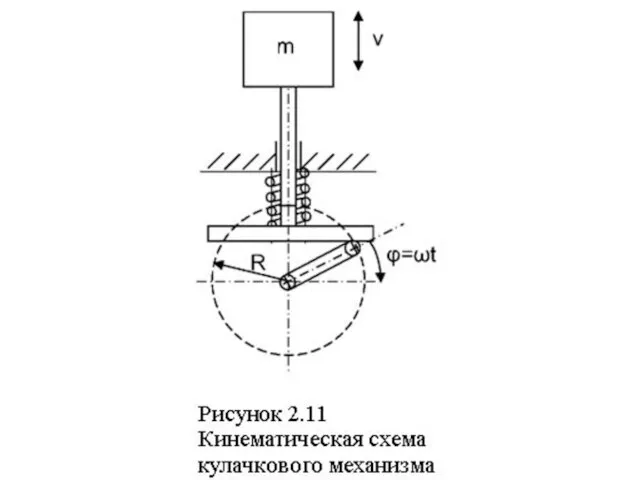
- 60. В кулачковом механизме (рис.2.11) на валу двигателя закреплен рычаг радиуса R, на конце которого установлен ролик.
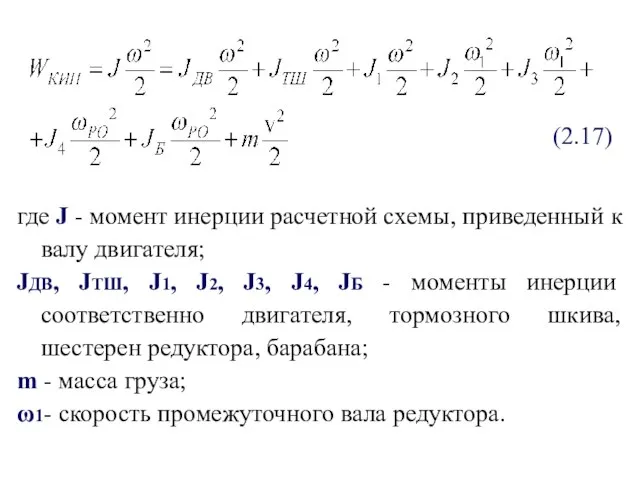
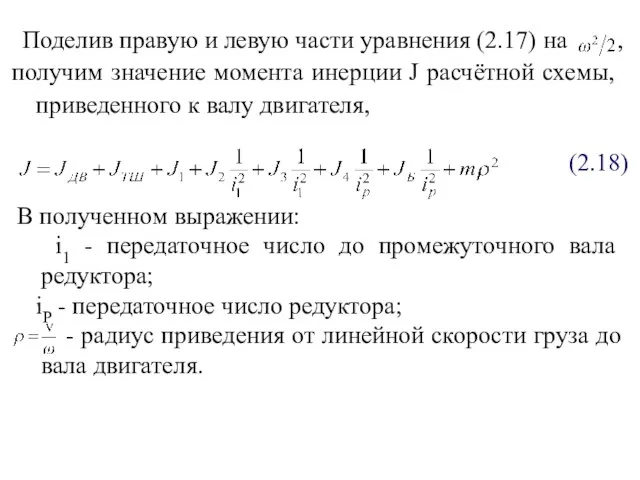
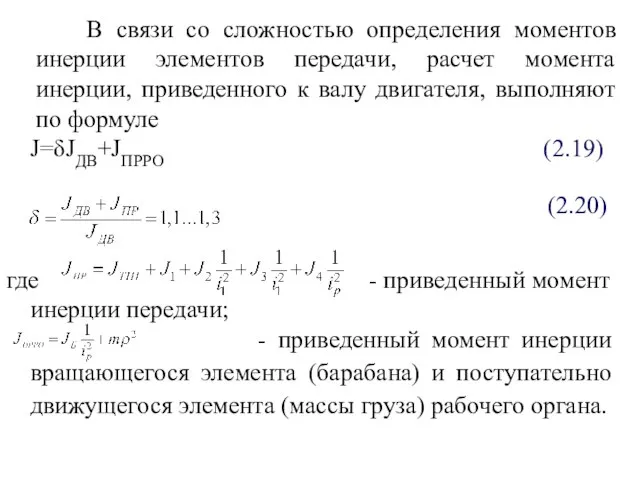
- 62. Приведенным моментом инерции расчётной схемы называют момент инерции простейшей системы, состоящей из элементов, вращающихся со скоростью
- 63. GD2=m(2ρ)2=4mρ2=4JP (2.23) где ρ — радиус инерции, м. Если сила тяжести выражена в ньютонах, то масса
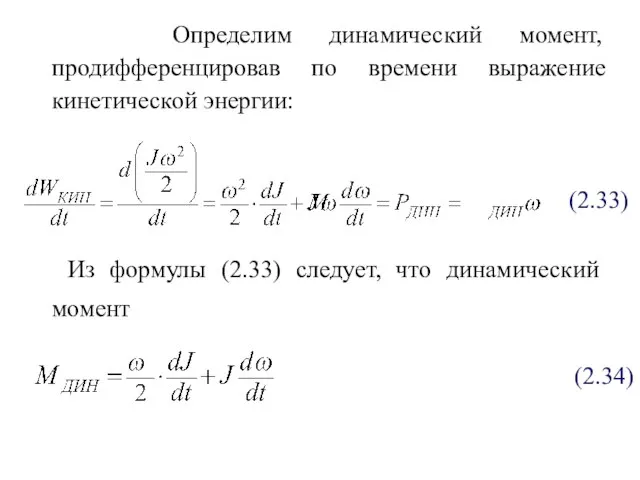
- 66. 2.5 Уравнение движения ЭП Механическая энергия на валу двигателя WДВ расходуется: - на совершение полезной работы
- 70. В основное уравнение движения входят: - М - электромагнитный момент двигателя; - Мс - момент сопротивления
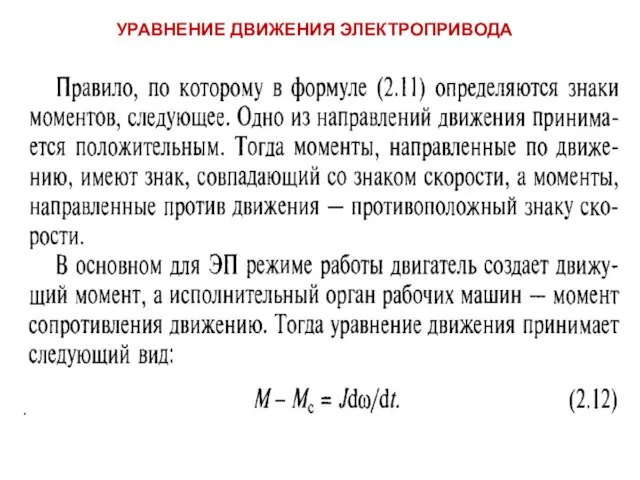
- 72. Знаки моментов: - момент двигателя положительный - М (+), если направление действия момента двигателя совпадает с
- 78. При скачке на входе МДИН(р) = М(р)-МС(р)=const и J=const выходная величина ω(t) будет нарастать по линейному
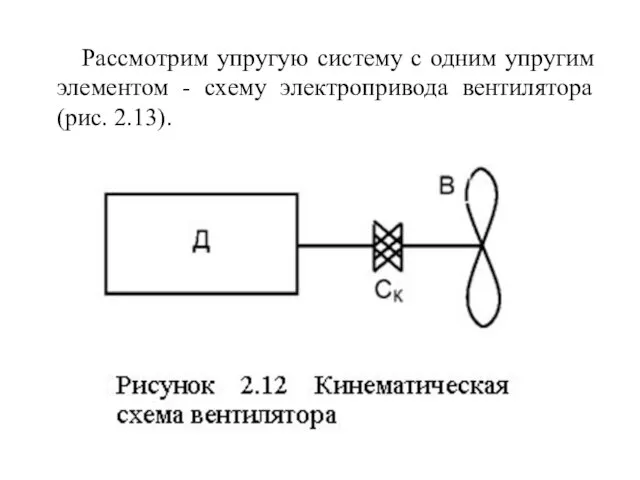
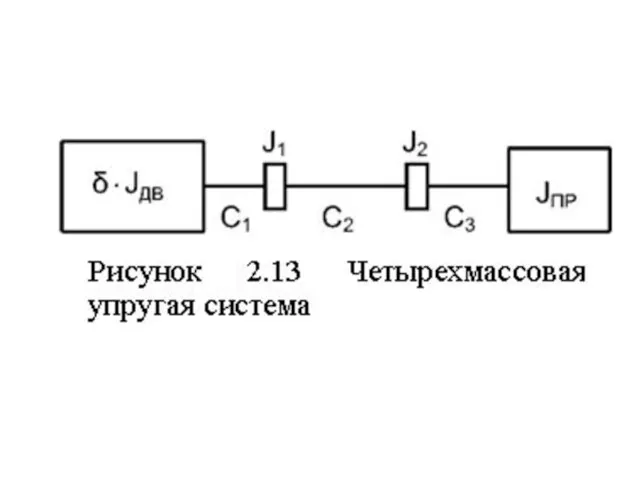
- 82. При наличии упругих элементов не всегда удаётся получить одномассовую расчётную схему, и в зависимости от числа
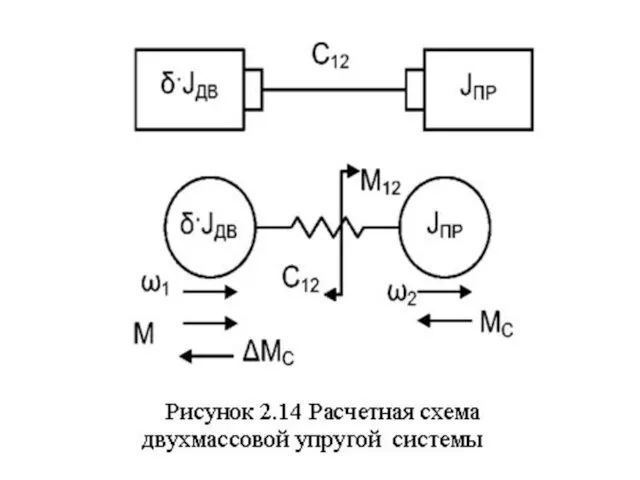
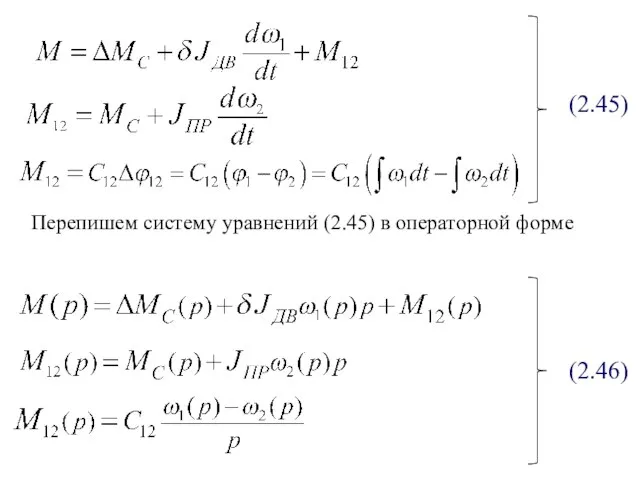
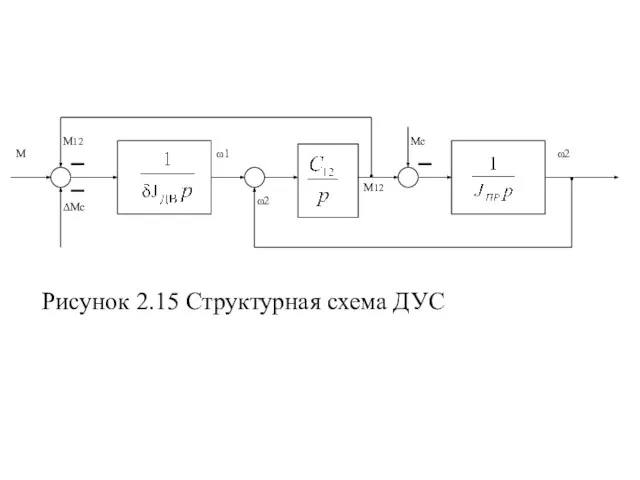
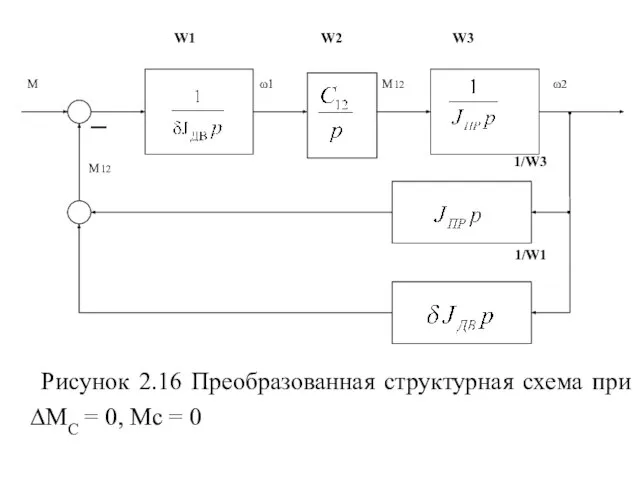
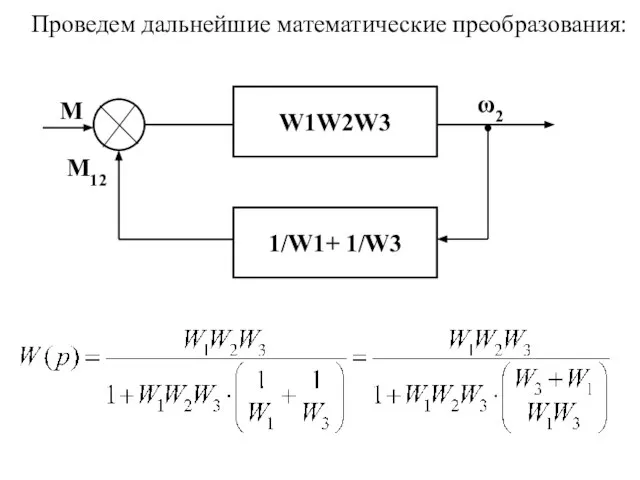
- 86. Главная масса δJДВ вращается со скоростью ω1, к ней приложен момент двигателя М и момент статический
- 95. Нетрудно убедиться, что амплитуда консервативного звена будет равна бесконечности А =∞ при Ω =1/Тк. Таким образом,
- 97. 2.7 Статическая и динамическая устойчивость ЭП Для расчетной одномассовой схемы установившееся механическое движение ЭП будет определяться
- 98. Механической характеристикой двигателя называется зависимость его угловой скорости от развиваемого момента ω(М) (для вращательного движения) или
- 99. Естественная характеристика двигателя (она у него единственная) соответствует основной (паспортной) схеме его включения и номинальным параметрам
- 101. Если включение двигателя происходит не по основной схеме, или в его электрические цепи включены какие-либо дополнительные
- 102. Механической характеристикой исполнительного органа называется зависимость скорости его движения от усилия или момента на нем, т.е.
- 103. Механические характеристики некоторых исполнительных органов приведены на рис. 2.18 б (5 - механизма главного движения металлообрабатывающего
- 104. По характеру действия моменты нагрузки Мс как указывалось ранее делятся на активные и реактивные. Активные моменты
- 105. Количественно механические характеристики двигателя и исполнительного органа оцениваются жесткостью β = dM/dω≈∆M/∆ω (2.48) Используя этот показатель,
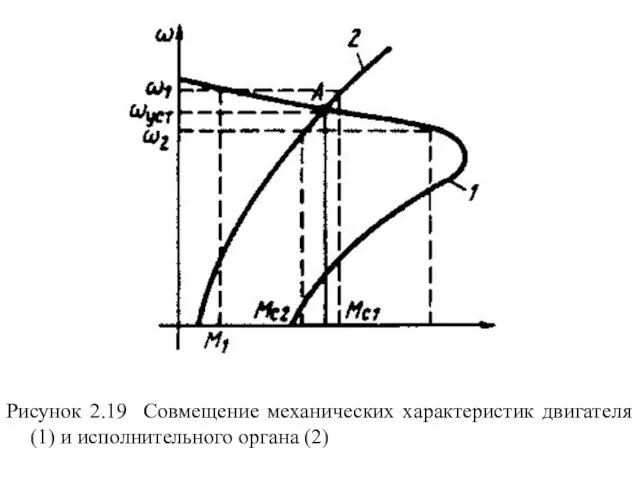
- 106. Введенное понятие механических характеристик позволяет графически выполнить проверку условия установившегося движения и найти его параметры. Для
- 107. Аналитический способ для такой проверки применяется в тех случаях, когда механические характеристики двигателя и нагрузки заданы
- 108. Видом механических характеристик двигателя и исполнительного органа определяется устойчивость установившегося движения. Под устойчивостью понимается свойство системы
- 110. Предположим, что по какой-то причине скорость ЭП повысилась до уровня ω1. Выясним, что будет происходить со
- 111. Рассмотрим теперь положение, при котором кратковременное возмущение вызвало снижение скорости до уровня ω2 Мс2 и под
- 112. Проверка на устойчивость движения может быть выполнена также аналитически с использованием понятия жесткости характеристик. Движение будет
- 113. Неустановившееся движение ЭП имеет место, когда моменты двигателя и нагрузки отличаются друг от друга, т. е.
- 114. Целью рассмотрения неустановившегося движения является получение зависимостей механических переменных (координат) ЭП - моментов, скорости и угла
- 115. Рассмотрим наиболее часто имеющий место случай, когда моменты двигателя и нагрузки ЭП являются постоянными величинами, не
- 117. Постоянная интегрирования С находится из начального условия переходного процесса: при t = 0 ω=ωНАЧ. Подставляя это
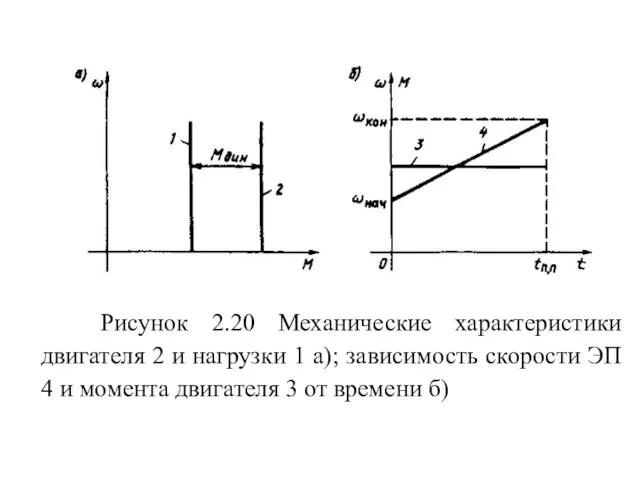
- 118. Время переходного процесса tПП, за которое скорость изменится от некоторого начального ωНАЧ до конечного ωКОН уровня,
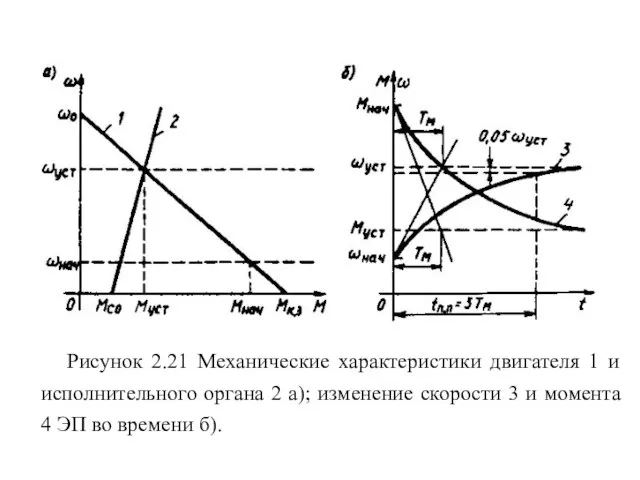
- 119. На рис. 2.21а показаны линейные механические характеристики двигателя 1 и исполнительного органа 2, построенные по следующим
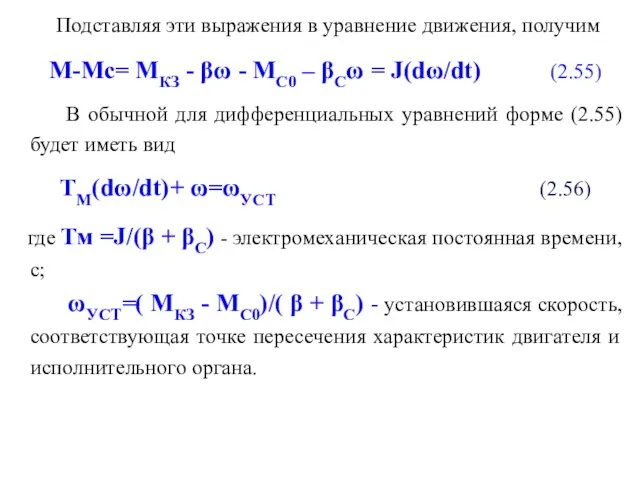
- 121. Подставляя эти выражения в уравнение движения, получим М-Мс= МКЗ - βω - МС0 – βСω =
- 122. Выражение (2.56) по своей форме является линейным неоднородным дифференциальным уравнением первого порядка, решение которого имеет вид
- 123. Запишем момент двигателя в функции времени, исходя из (2.58) и (2.59): М(t) = МКЗ - βω(t)
- 124. Время переходного процесса tПП, за которое скорость двигателя изменится от некоторого начального значения ωНАЧ до конечного
- 125. Как следует из (2.62), время достижения установившихся уровней скорости и момента (т.е. время переходного процесса) является
- 126. Постоянная времени Тм имеет определенное графическое и физическое выражение. На рис. 2.21,б она равна отрезку, отсекаемому
- 127. Линеаризация нелинейных механических характеристик двигателя и исполнительного органа основана на представлении (аппроксимации) этих характеристик или их
- 128. При переходных процессах этого вида моменты двигателя и исполнительного органа различны и могут быть нелинейными функциями
- 130. Точное интегрирование уравнения движения используется в тех случаях, когда моменты двигателя и исполнительного органа заданы аналитически
- 132. Скачать презентацию
МЕХАНИКА ЭЛЕКТРОПРИВОДА
В механическом движении элементов электропривода (ЭП) участвуют ротор электродвигателя, элементы
МЕХАНИКА ЭЛЕКТРОПРИВОДА
В механическом движении элементов электропривода (ЭП) участвуют ротор электродвигателя, элементы
МЕХАНИКА ЭЛЕКТРОПРИВОДА
МЕХАНИКА ЭЛЕКТРОПРИВОДА
МЕХАНИКА ЭЛЕКТРОПРИВОДА
МЕХАНИКА ЭЛЕКТРОПРИВОДА
2.1. Уравнение движения электропривода
Рассмотрим простейшую механическую систему, состоящую из ротора электродвигателя
2.1. Уравнение движения электропривода
Рассмотрим простейшую механическую систему, состоящую из ротора электродвигателя
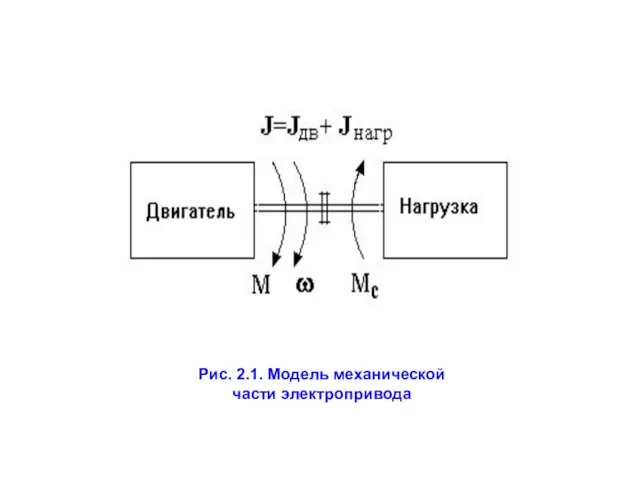
Рис. 2.1. Модель механической части электропривода
Рис. 2.1. Модель механической части электропривода
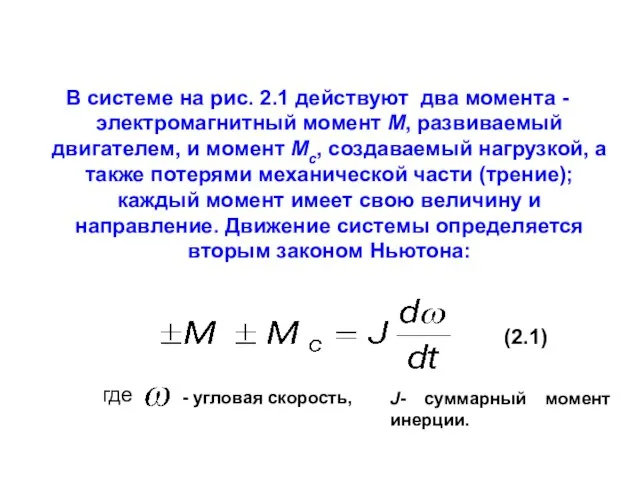
В системе на рис. 2.1 действуют два момента - электромагнитный момент
В системе на рис. 2.1 действуют два момента - электромагнитный момент
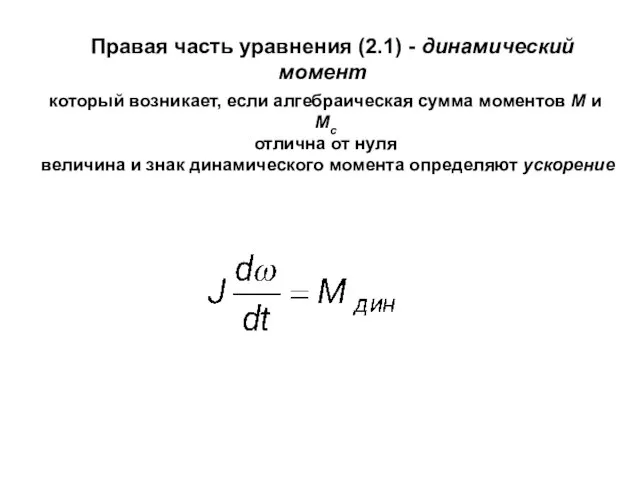
Правая часть уравнения (2.1) - динамический момент
который возникает, если
Правая часть уравнения (2.1) - динамический момент
который возникает, если
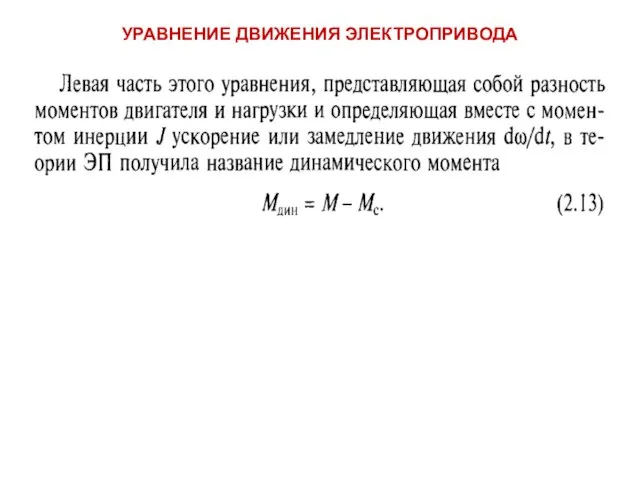
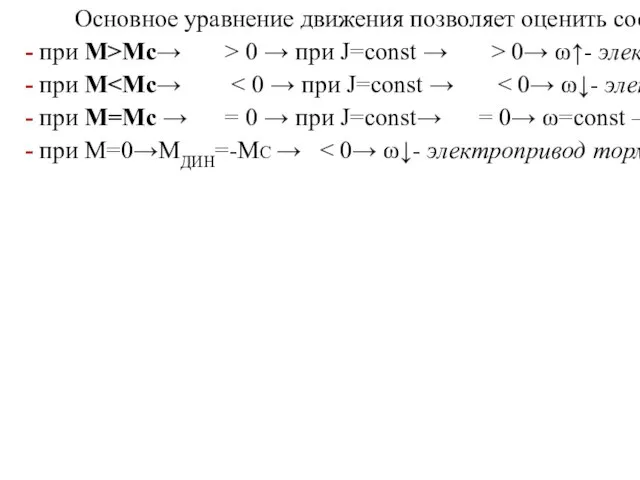
Состояние привода определяется знаком и значением динамического момента Мдин.
Состояние привода определяется знаком и значением динамического момента Мдин.
УРАВНЕНИЕ ДВИЖЕНИЯ ЭЛЕКТРОПРИВОДА
УРАВНЕНИЕ ДВИЖЕНИЯ ЭЛЕКТРОПРИВОДА
УРАВНЕНИЕ ДВИЖЕНИЯ ЭЛЕКТРОПРИВОДА
УРАВНЕНИЕ ДВИЖЕНИЯ ЭЛЕКТРОПРИВОДА
Уравнение движения ЭП
Уравнение движения ЭП
2.2 Приведение моментов сопротивления и моментов инерции
Обычно между двигателем и нагрузкой
2.2 Приведение моментов сопротивления и моментов инерции
Обычно между двигателем и нагрузкой
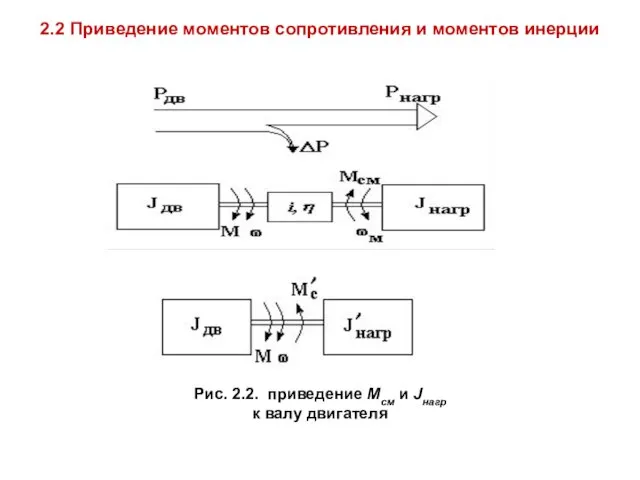
2.2 Приведение моментов сопротивления и моментов инерции
Рис. 2.2. приведение Мсм и
2.2 Приведение моментов сопротивления и моментов инерции
Рис. 2.2. приведение Мсм и
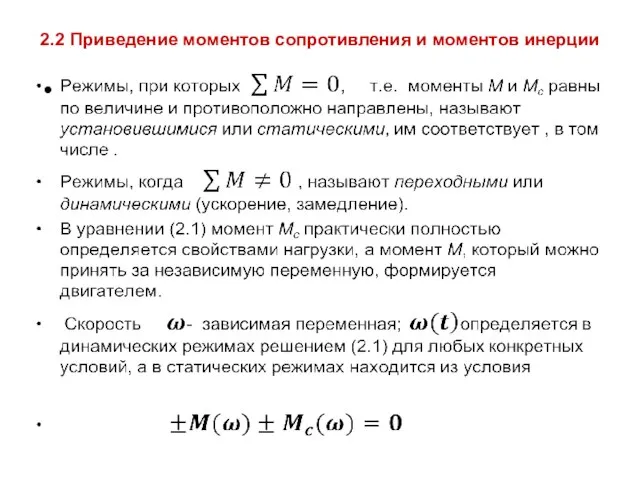
2.2 Приведение моментов сопротивления и моментов инерции
2.2 Приведение моментов сопротивления и моментов инерции
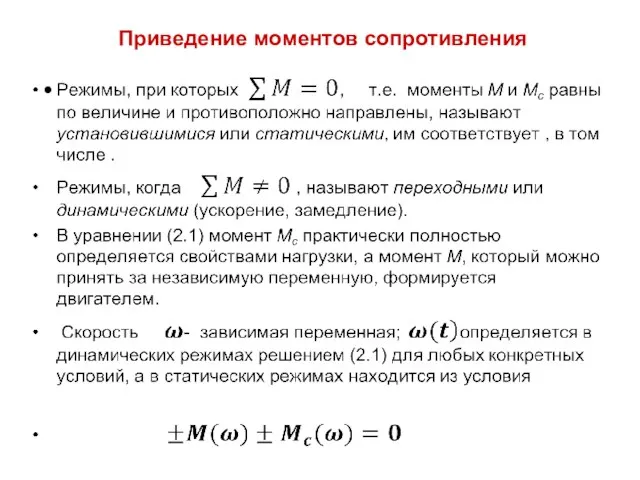
Приведение моментов сопротивления
Приведение моментов сопротивления
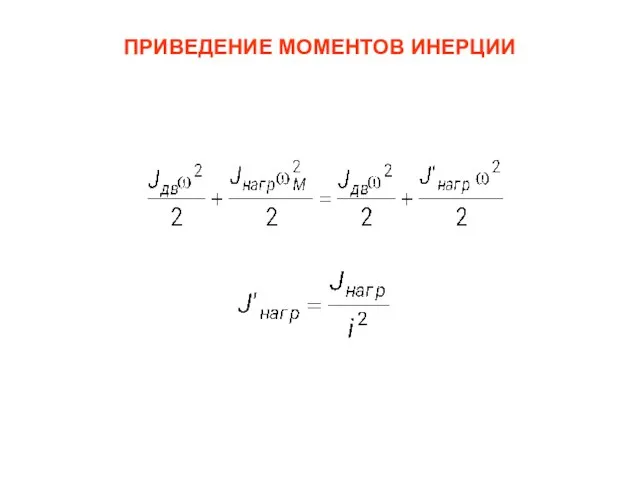
ПРИВЕДЕНИЕ МОМЕНТОВ ИНЕРЦИИ
ПРИВЕДЕНИЕ МОМЕНТОВ ИНЕРЦИИ
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Моменты М и Мс могут зависеть от времени, от положения,
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Моменты М и Мс могут зависеть от времени, от положения,
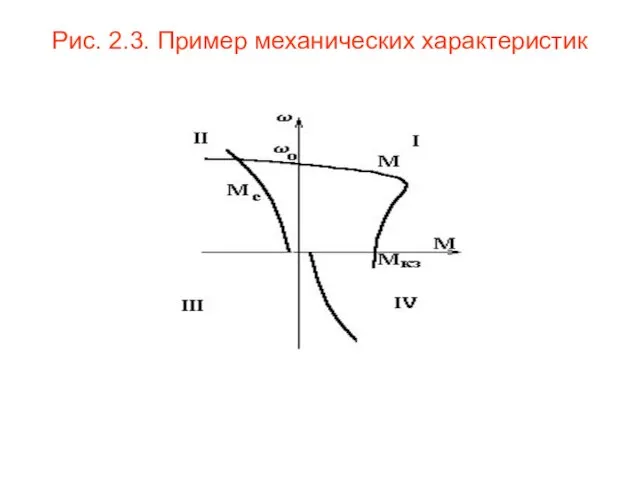
Рис. 2.3. Пример механических характеристик
Рис. 2.3. Пример механических характеристик
МОМЕНТЫ, ДЕЙСТВУЮЩИЕ В ЭП
Моменты принято делить на активные и реактивные.
Активные
МОМЕНТЫ, ДЕЙСТВУЮЩИЕ В ЭП
Моменты принято делить на активные и реактивные.
Активные
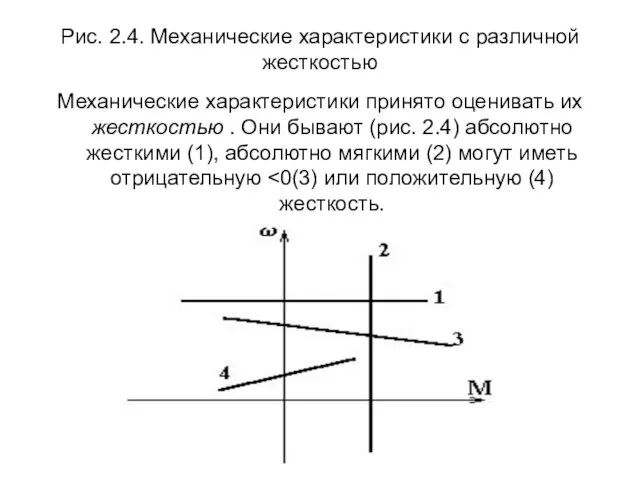
Рис. 2.4. Механические характеристики с различной жесткостью
Механические характеристики принято оценивать их
Рис. 2.4. Механические характеристики с различной жесткостью
Механические характеристики принято оценивать их
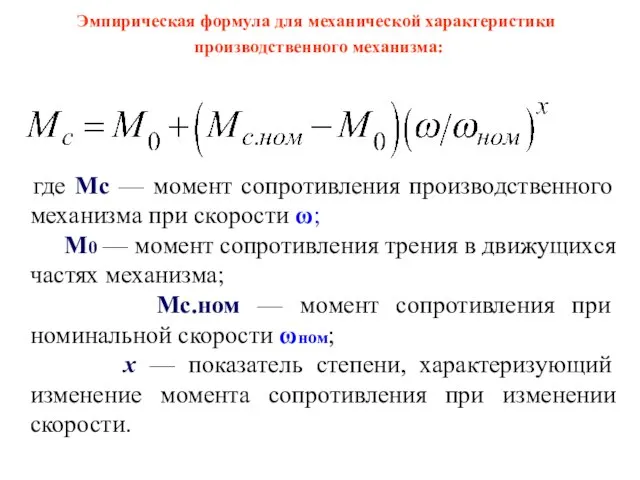
Классификация механических характеристик рабочих машин и электродвигателей
Зависимость между приведенными к валу
Классификация механических характеристик рабочих машин и электродвигателей
Зависимость между приведенными к валу
Приведенная формула позволяет классифицировать механические характеристики производственных механизмов ориентировочно на
Приведенная формула позволяет классифицировать механические характеристики производственных механизмов ориентировочно на
2. Линейно-возрастающая механическая характеристика (прямая 2 па рис. 2.4).
2. Линейно-возрастающая механическая характеристика (прямая 2 па рис. 2.4).
4. Нелинейно-спадающая механическая характеристика (кривая 4 на рис. 2.4).
4. Нелинейно-спадающая механическая характеристика (кривая 4 на рис. 2.4).
Механической характеристикой электродвигателя называется зависимость его угловой скорости от вращающего
Механической характеристикой электродвигателя называется зависимость его угловой скорости от вращающего
Механические характеристики электродвигателей можно разделить на четыре основные категории:
1.Абсолютно
Механические характеристики электродвигателей можно разделить на четыре основные категории:
1.Абсолютно
Жесткой механической характеристикой обладают двигатели постоянного тока независимого возбуждения, а
Жесткой механической характеристикой обладают двигатели постоянного тока независимого возбуждения, а
3. Мягкая механическая характеристика — это характеристика, при которой с
3. Мягкая механическая характеристика — это характеристика, при которой с
4. Абсолютно мягкая механическая характеристика (β=0) - это характеристика, при
4. Абсолютно мягкая механическая характеристика (β=0) - это характеристика, при
Кинематические схемы и параметры механической части ЭП
Основная задача электропривода -
Кинематические схемы и параметры механической части ЭП
Основная задача электропривода -
Кинематические схемы конкретных электроприводов бесконечно многообразны, однако обладают общими особенностями:
Кинематические схемы конкретных электроприводов бесконечно многообразны, однако обладают общими особенностями:

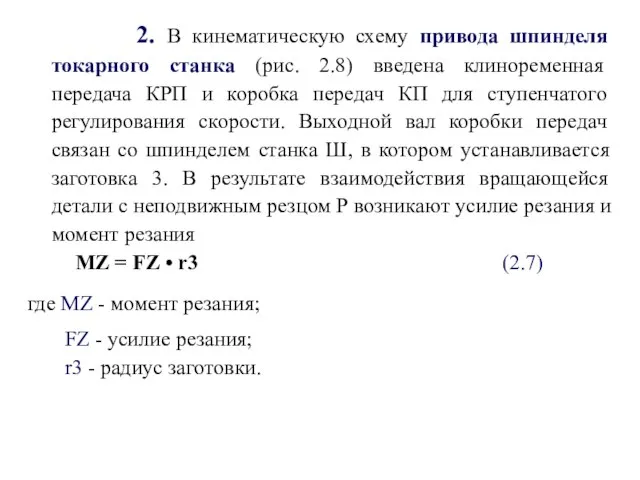
2. В кинематическую схему привода шпинделя токарного станка (рис. 2.8)
2. В кинематическую схему привода шпинделя токарного станка (рис. 2.8)
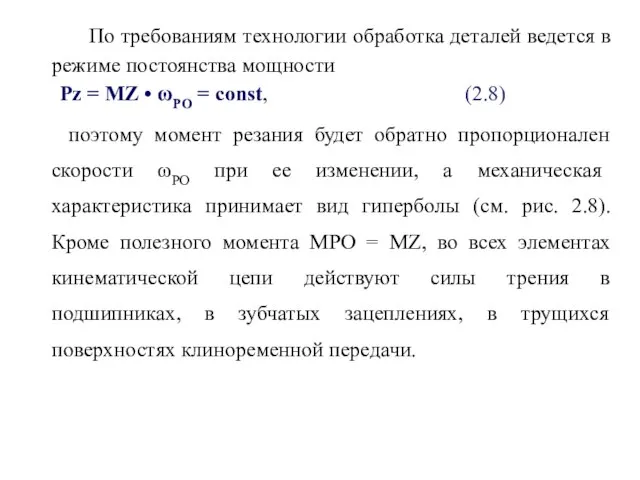
По требованиям технологии обработка деталей ведется в режиме постоянства мощности
По требованиям технологии обработка деталей ведется в режиме постоянства мощности

Из формулы (2.9) следует, что модуль силы трения не зависит
Из формулы (2.9) следует, что модуль силы трения не зависит
ω1
ω1
Кроме силы тяжести двигатель преодолевает силы трения в подшипниках и
Кроме силы тяжести двигатель преодолевает силы трения в подшипниках и
При многообразии кинематических схем рабочего органа по отношению к электроприводу
При многообразии кинематических схем рабочего органа по отношению к электроприводу
моменты сопротивления могут иметь характер активный (энергия поступает от другого
моменты сопротивления могут иметь характер активный (энергия поступает от другого
2.4 Расчетные схемы механической части электропривода
Кинематическая схема дает представление
2.4 Расчетные схемы механической части электропривода
Кинематическая схема дает представление
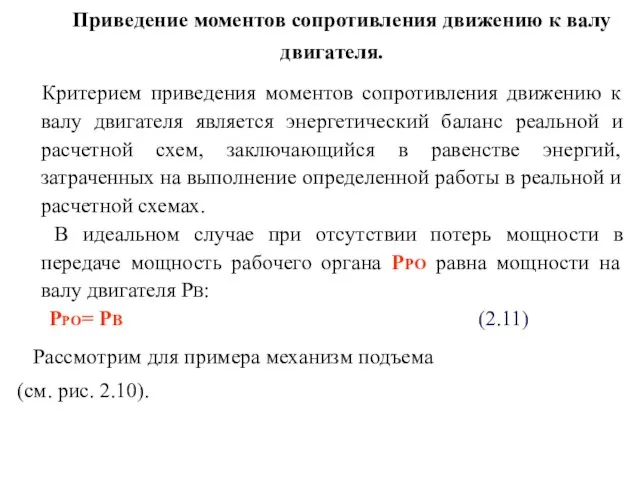
Приведение моментов сопротивления движению к валу двигателя.
Критерием приведения
Приведение моментов сопротивления движению к валу двигателя.
Критерием приведения
ω1
ω1

Приведение моментов инерции к валу двигателя.
Критерием приведения является равенство
Приведение моментов инерции к валу двигателя.
Критерием приведения является равенство
В кулачковом механизме (рис.2.11) на валу двигателя закреплен рычаг радиуса
В кулачковом механизме (рис.2.11) на валу двигателя закреплен рычаг радиуса
Приведенным моментом инерции расчётной схемы называют момент инерции простейшей системы,
Приведенным моментом инерции расчётной схемы называют момент инерции простейшей системы,
GD2=m(2ρ)2=4mρ2=4JP (2.23)
где ρ — радиус инерции, м.
Если сила тяжести
GD2=m(2ρ)2=4mρ2=4JP (2.23)
где ρ — радиус инерции, м.
Если сила тяжести
2.5 Уравнение движения ЭП
Механическая энергия на валу двигателя WДВ расходуется:
2.5 Уравнение движения ЭП
Механическая энергия на валу двигателя WДВ расходуется:

В основное уравнение движения входят:
- М - электромагнитный момент
В основное уравнение движения входят:
- М - электромагнитный момент
Знаки моментов:
- момент двигателя положительный - М (+), если направление
Знаки моментов:
- момент двигателя положительный - М (+), если направление

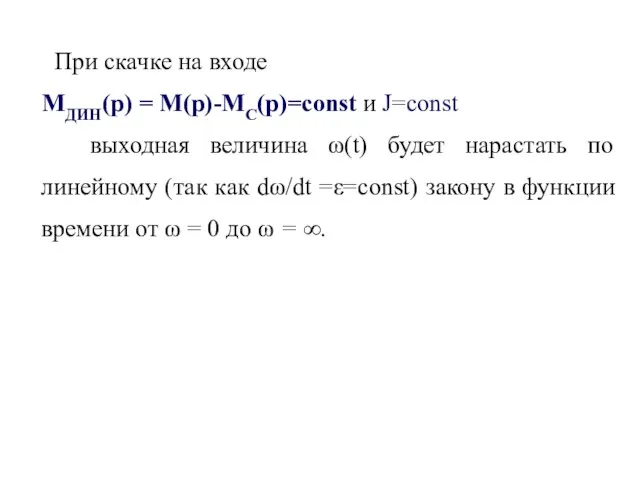
При скачке на входе
МДИН(р) = М(р)-МС(р)=const и J=const
При скачке на входе
МДИН(р) = М(р)-МС(р)=const и J=const


При наличии упругих элементов не всегда удаётся получить одномассовую расчётную
При наличии упругих элементов не всегда удаётся получить одномассовую расчётную

Главная масса δJДВ вращается со скоростью ω1, к ней приложен
Главная масса δJДВ вращается со скоростью ω1, к ней приложен


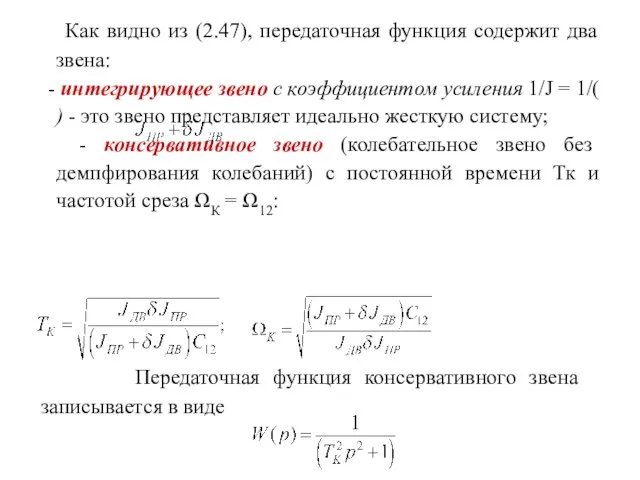
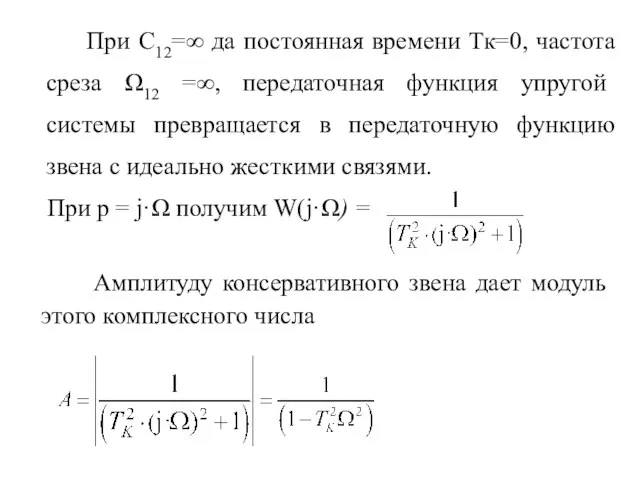
Нетрудно убедиться, что амплитуда консервативного звена будет равна бесконечности
Нетрудно убедиться, что амплитуда консервативного звена будет равна бесконечности

2.7 Статическая и динамическая устойчивость ЭП
Для расчетной одномассовой схемы
2.7 Статическая и динамическая устойчивость ЭП
Для расчетной одномассовой схемы
Механической характеристикой двигателя называется зависимость его угловой скорости от развиваемого
Механической характеристикой двигателя называется зависимость его угловой скорости от развиваемого
Естественная характеристика двигателя (она у него единственная) соответствует основной (паспортной)
Естественная характеристика двигателя (она у него единственная) соответствует основной (паспортной)

Если включение двигателя происходит не по основной схеме, или в
Если включение двигателя происходит не по основной схеме, или в
Механической характеристикой исполнительного органа называется зависимость скорости его движения от
Механической характеристикой исполнительного органа называется зависимость скорости его движения от
Механические характеристики некоторых исполнительных органов приведены на рис. 2.18 б
Механические характеристики некоторых исполнительных органов приведены на рис. 2.18 б
По характеру действия моменты нагрузки Мс как указывалось ранее делятся
По характеру действия моменты нагрузки Мс как указывалось ранее делятся
Количественно механические характеристики двигателя и исполнительного органа оцениваются жесткостью
β
Количественно механические характеристики двигателя и исполнительного органа оцениваются жесткостью
β
Введенное понятие механических характеристик позволяет графически выполнить проверку условия установившегося
Введенное понятие механических характеристик позволяет графически выполнить проверку условия установившегося
Аналитический способ для такой проверки применяется в тех случаях, когда
Аналитический способ для такой проверки применяется в тех случаях, когда
Видом механических характеристик двигателя и исполнительного органа определяется устойчивость установившегося
Видом механических характеристик двигателя и исполнительного органа определяется устойчивость установившегося
Предположим, что по какой-то причине скорость ЭП повысилась до уровня
Предположим, что по какой-то причине скорость ЭП повысилась до уровня
Рассмотрим теперь положение, при котором кратковременное возмущение вызвало снижение скорости
Рассмотрим теперь положение, при котором кратковременное возмущение вызвало снижение скорости
Проверка на устойчивость движения может быть выполнена также аналитически с
Проверка на устойчивость движения может быть выполнена также аналитически с
Неустановившееся движение ЭП имеет место, когда моменты двигателя и нагрузки
Неустановившееся движение ЭП имеет место, когда моменты двигателя и нагрузки
Целью рассмотрения неустановившегося движения является получение зависимостей механических переменных (координат)
Целью рассмотрения неустановившегося движения является получение зависимостей механических переменных (координат)
Рассмотрим наиболее часто имеющий место случай, когда моменты двигателя и
Рассмотрим наиболее часто имеющий место случай, когда моменты двигателя и
Постоянная интегрирования С находится из начального условия переходного процесса: при
Постоянная интегрирования С находится из начального условия переходного процесса: при
Время переходного процесса tПП, за которое скорость изменится от некоторого
Время переходного процесса tПП, за которое скорость изменится от некоторого
На рис. 2.21а показаны линейные механические характеристики двигателя 1 и
На рис. 2.21а показаны линейные механические характеристики двигателя 1 и
Подставляя эти выражения в уравнение движения, получим
М-Мс= МКЗ -
Подставляя эти выражения в уравнение движения, получим
М-Мс= МКЗ -
Выражение (2.56) по своей форме является линейным неоднородным дифференциальным уравнением
Выражение (2.56) по своей форме является линейным неоднородным дифференциальным уравнением
Запишем момент двигателя в функции времени, исходя из (2.58) и
Запишем момент двигателя в функции времени, исходя из (2.58) и
Время переходного процесса tПП, за которое скорость двигателя изменится от
Время переходного процесса tПП, за которое скорость двигателя изменится от
Как следует из (2.62), время достижения установившихся уровней скорости и
Как следует из (2.62), время достижения установившихся уровней скорости и
Постоянная времени Тм имеет определенное графическое и физическое выражение. На
Постоянная времени Тм имеет определенное графическое и физическое выражение. На
Линеаризация нелинейных механических характеристик двигателя и исполнительного органа основана на
Линеаризация нелинейных механических характеристик двигателя и исполнительного органа основана на
При переходных процессах этого вида моменты двигателя и исполнительного органа
При переходных процессах этого вида моменты двигателя и исполнительного органа

Точное интегрирование уравнения движения используется в тех случаях, когда моменты
Точное интегрирование уравнения движения используется в тех случаях, когда моменты
 Тема 6. Магнитные возбуждения в твердом теле. Магнетизм
Тема 6. Магнитные возбуждения в твердом теле. Магнетизм Явления при стекании тока в землю
Явления при стекании тока в землю Физические и химические явления
Физические и химические явления Закон сохранения энергии
Закон сохранения энергии Загальне знання повітряних суден. Планер літального апарата
Загальне знання повітряних суден. Планер літального апарата Московский городской педагогический университет Педагогический институт физической культуры Кафедра информатизации образовани
Московский городской педагогический университет Педагогический институт физической культуры Кафедра информатизации образовани Презентация по физике "Энергия связи ядра и дефект масс" - скачать
Презентация по физике "Энергия связи ядра и дефект масс" - скачать  Механические свойства твердых тел и методы их определения
Механические свойства твердых тел и методы их определения Действие магнитного поля на проводник с током. Закон Ампера
Действие магнитного поля на проводник с током. Закон Ампера Tvaika starppārkarsējums
Tvaika starppārkarsējums Сила и импульс (Force & Momentum)
Сила и импульс (Force & Momentum) Презентация по физике Физика твердого тела
Презентация по физике Физика твердого тела  Использование электроэнергии в транспорте
Использование электроэнергии в транспорте Агрегатные состояния веществ
Агрегатные состояния веществ Ядерное оружие
Ядерное оружие Проста модель освітлення
Проста модель освітлення Конвективный теплообмен в однофазных средах. (Лекция 8)
Конвективный теплообмен в однофазных средах. (Лекция 8) Биомеханика человека
Биомеханика человека ЗАКОН СОХРАНЕНИЯ ВНУТРЕННЕЙ ЭНЕРГИИ
ЗАКОН СОХРАНЕНИЯ ВНУТРЕННЕЙ ЭНЕРГИИ Явления электромагнитной индукции
Явления электромагнитной индукции The possibility of modifying the elements of the metal powder assembly with nanoparticles in order to reduce the friction
The possibility of modifying the elements of the metal powder assembly with nanoparticles in order to reduce the friction Tok energie
Tok energie Теоретические основы бокового каротажа
Теоретические основы бокового каротажа Свет в жизни человека
Свет в жизни человека Кинематика твердого тела. Плоское движение
Кинематика твердого тела. Плоское движение Молниезащита. (Лекция 9)
Молниезащита. (Лекция 9) Аналіз технологій мультимедійного доступу через кабельні мережі
Аналіз технологій мультимедійного доступу через кабельні мережі Дислокации в тонких пленках
Дислокации в тонких пленках