- Основные задачи синтеза кулачковых механизмов

Содержание
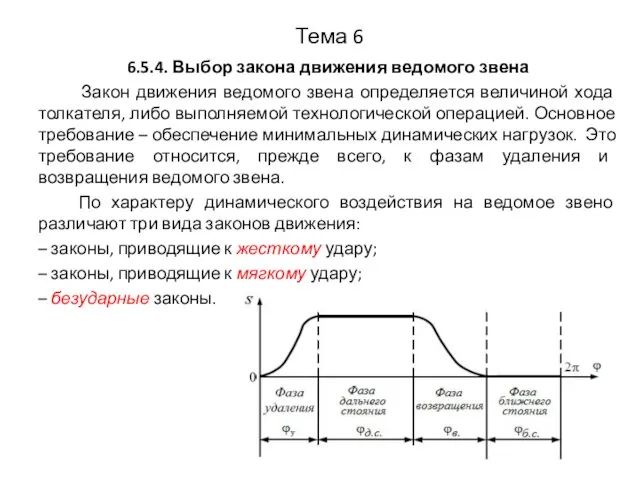
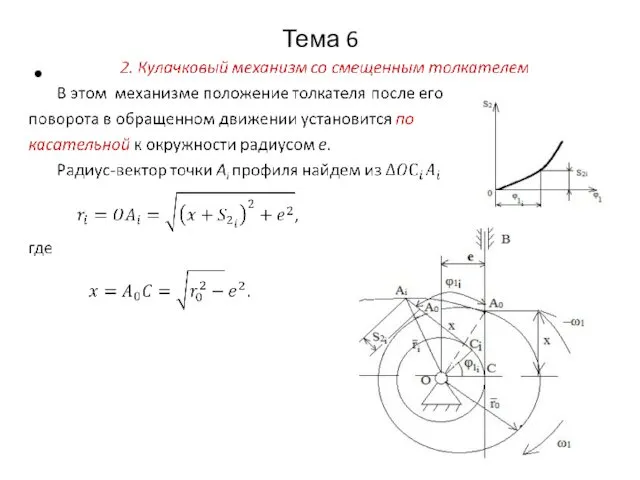
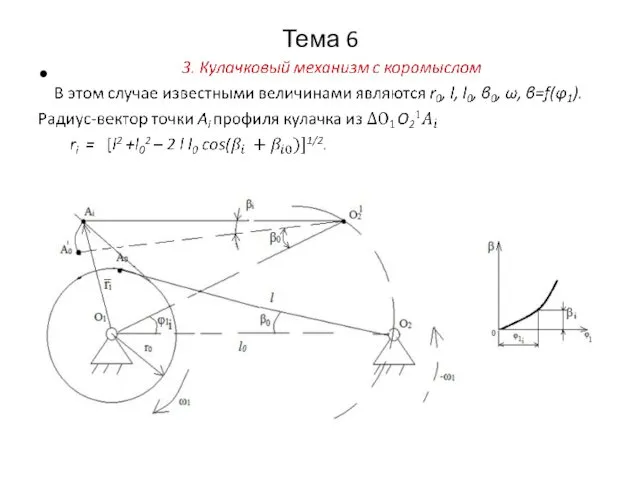
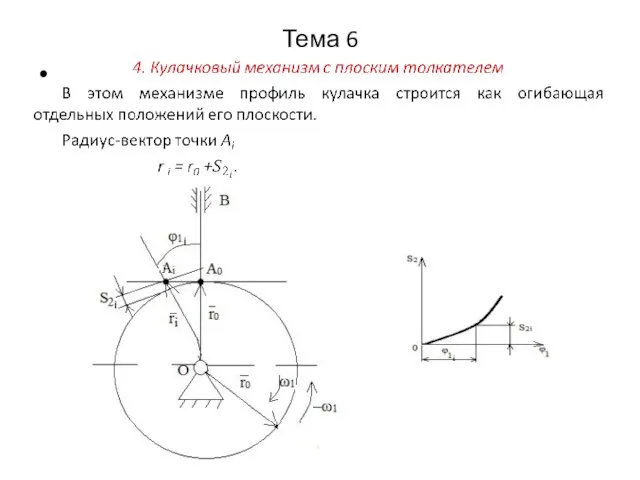
- 2. Тема 6 6.5.4. Выбор закона движения ведомого звена Закон движения ведомого звена определяется величиной хода толкателя,
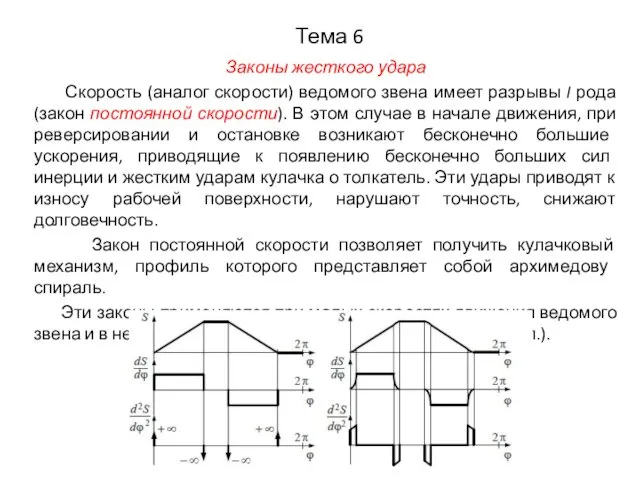
- 3. Тема 6 Законы жесткого удара Скорость (аналог скорости) ведомого звена имеет разрывы I рода (закон постоянной
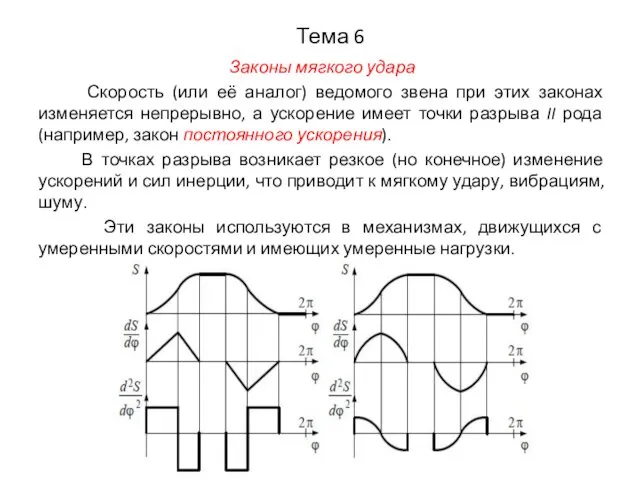
- 4. Тема 6 Законы мягкого удара Скорость (или её аналог) ведомого звена при этих законах изменяется непрерывно,
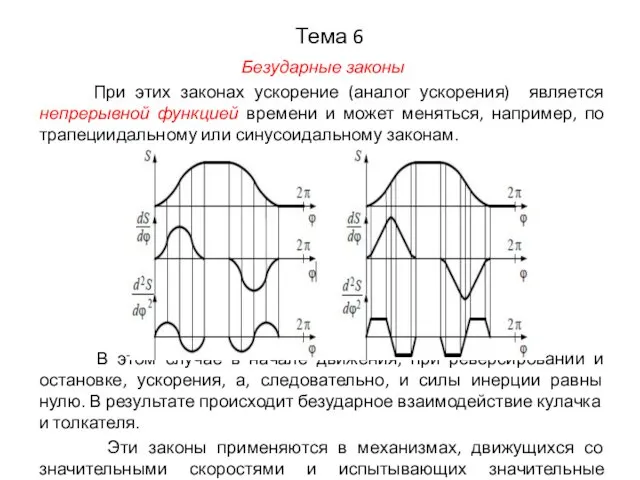
- 5. Тема 6 Безударные законы При этих законах ускорение (аналог ускорения) является непрерывной функцией времени и может
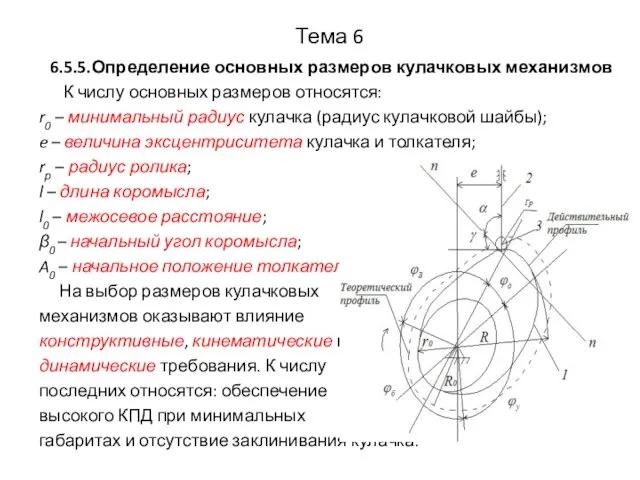
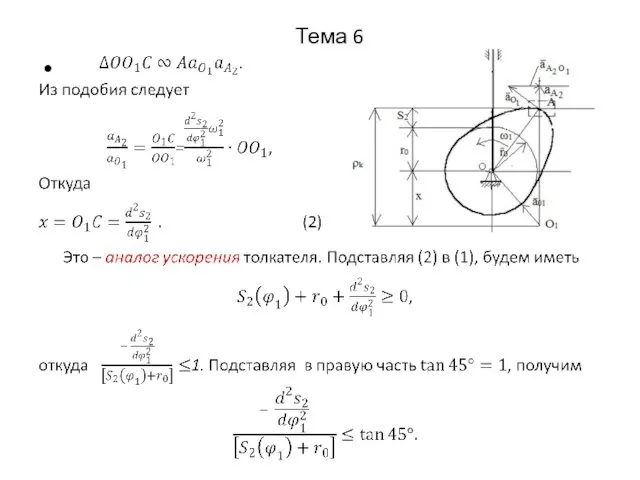
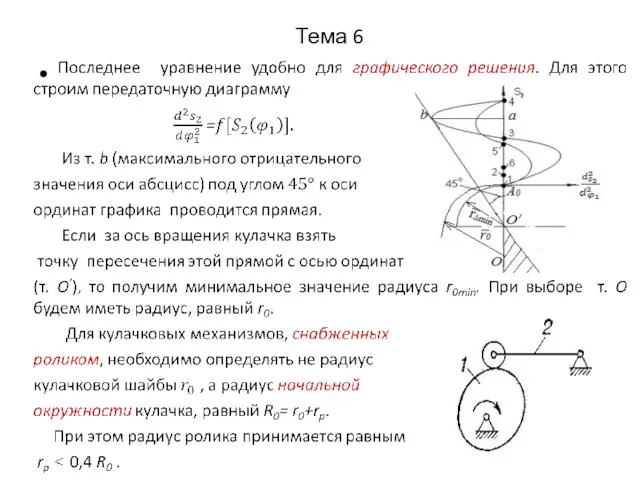
- 6. Тема 6 6.5.5.Определение основных размеров кулачковых механизмов К числу основных размеров относятся: r0 – минимальный радиус
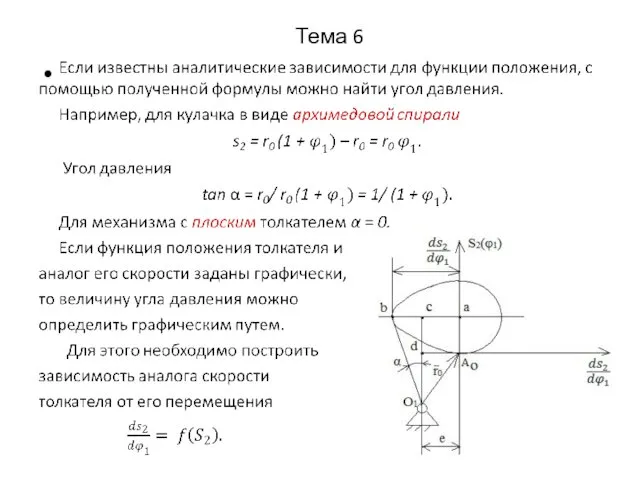
- 7. Тема 6
- 8. Тема 6
- 9. Тема 6
- 10. Тема 6
- 11. Тема 6
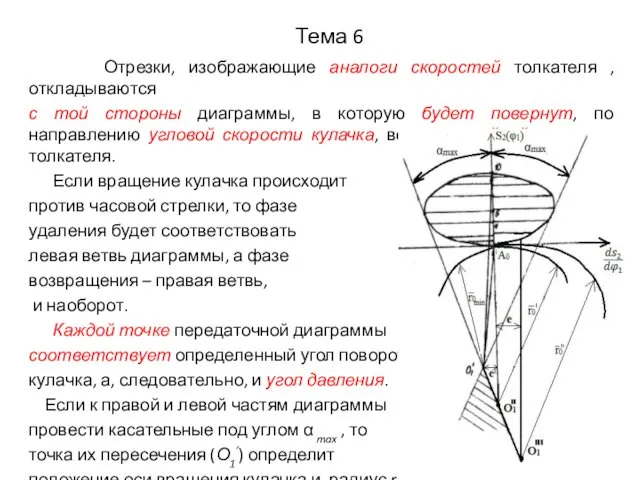
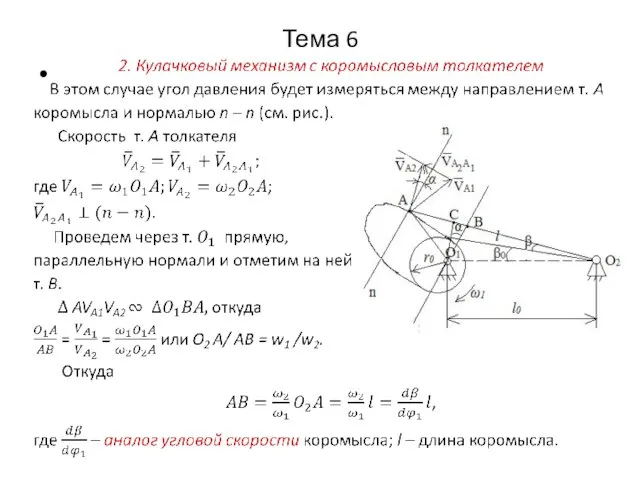
- 12. Тема 6 Отрезки, изображающие аналоги скоростей толкателя , откладываются с той стороны диаграммы, в которую будет
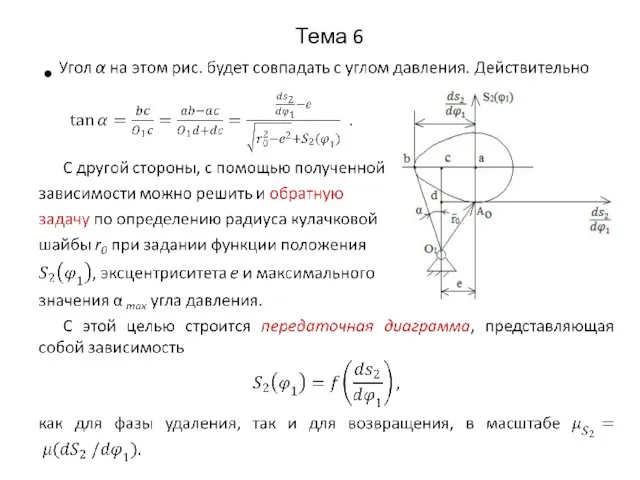
- 13. Тема 6
- 14. Тема 6
- 15. Тема 6
- 16. Тема 6
- 17. Тема 6
- 18. Тема 6
- 19. Тема 6
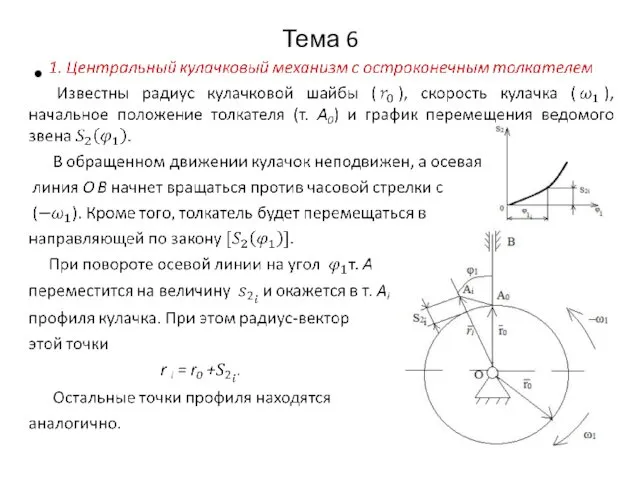
- 20. Тема 6 6.5.6. Построение теоретического профиля кулачка После определения основных размеров кулачкового механизма и выбора законов
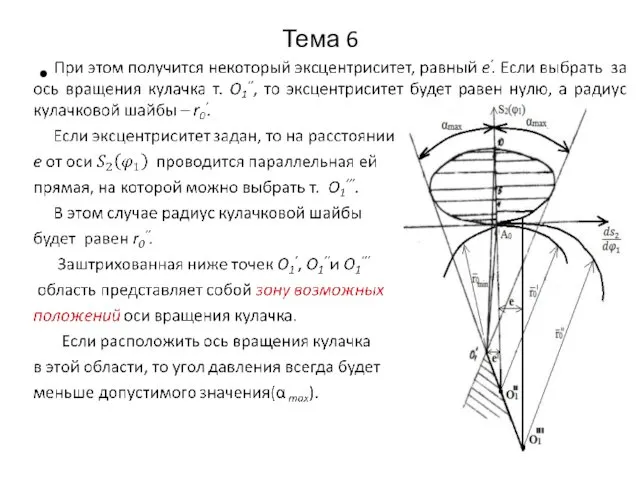
- 21. Тема 6
- 22. Тема 6
- 23. Тема 6
- 24. Тема 6
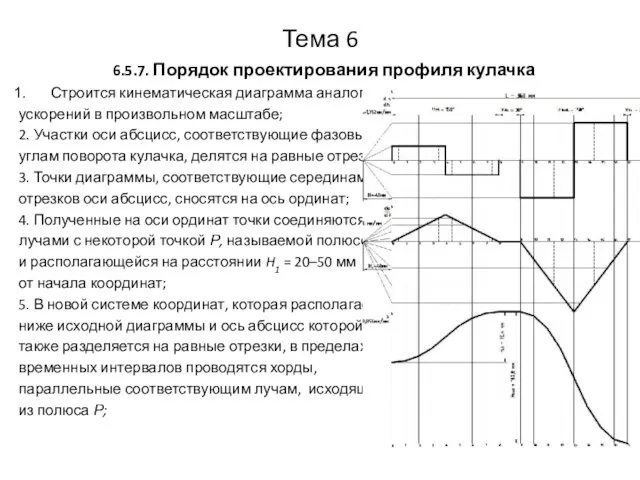
- 25. Тема 6 6.5.7. Порядок проектирования профиля кулачка Строится кинематическая диаграмма аналога ускорений в произвольном масштабе; 2.
- 26. Тема 6 6. Полученный в виде ломаной линии график аналогов скоростей заменяется плавной кривой; 7. Аналогичным
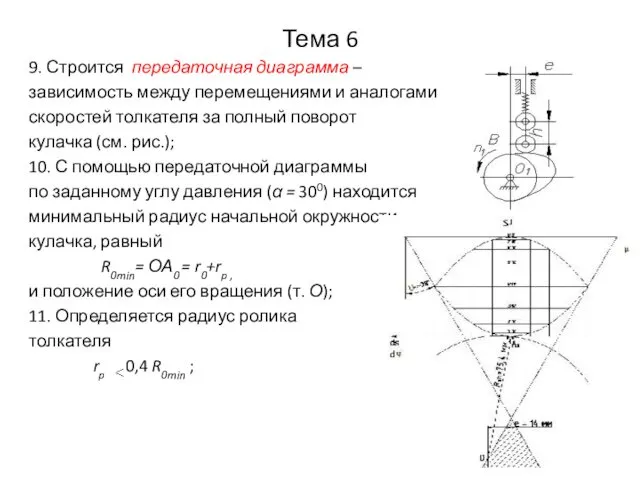
- 27. Тема 6 9. Строится передаточная диаграмма – зависимость между перемещениями и аналогами скоростей толкателя за полный
- 29. Скачать презентацию
Тема 6
6.5.4. Выбор закона движения ведомого звена
Закон движения ведомого звена
Тема 6
6.5.4. Выбор закона движения ведомого звена
Закон движения ведомого звена
Тема 6
Законы жесткого удара
Скорость (аналог скорости) ведомого звена имеет разрывы
Тема 6
Законы жесткого удара
Скорость (аналог скорости) ведомого звена имеет разрывы
Тема 6
Законы мягкого удара
Скорость (или её аналог) ведомого звена при
Тема 6
Законы мягкого удара
Скорость (или её аналог) ведомого звена при
Тема 6
Безударные законы
При этих законах ускорение (аналог ускорения) является непрерывной
Тема 6
Безударные законы
При этих законах ускорение (аналог ускорения) является непрерывной
Тема 6
6.5.5.Определение основных размеров кулачковых механизмов
К числу основных размеров относятся:
r0
Тема 6
6.5.5.Определение основных размеров кулачковых механизмов
К числу основных размеров относятся:
r0
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Отрезки, изображающие аналоги скоростей толкателя , откладываются
с той
Тема 6
Отрезки, изображающие аналоги скоростей толкателя , откладываются
с той
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
6.5.6. Построение теоретического профиля кулачка
После определения основных размеров кулачкового
Тема 6
6.5.6. Построение теоретического профиля кулачка
После определения основных размеров кулачкового
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
Тема 6
6.5.7. Порядок проектирования профиля кулачка
Строится кинематическая диаграмма аналога
ускорений в произвольном
Тема 6
6.5.7. Порядок проектирования профиля кулачка
Строится кинематическая диаграмма аналога
ускорений в произвольном

Тема 6
6. Полученный в виде ломаной линии
график аналогов скоростей заменяется
плавной
Тема 6
6. Полученный в виде ломаной линии
график аналогов скоростей заменяется
плавной
Тема 6
9. Строится передаточная диаграмма –
зависимость между перемещениями и аналогами
скоростей
Тема 6
9. Строится передаточная диаграмма –
зависимость между перемещениями и аналогами
скоростей
 Виды сил
Виды сил Измерение атмосферного давления
Измерение атмосферного давления Точность систем автоматического управления
Точность систем автоматического управления Адсорбация ПАВ на границе раствор - газ
Адсорбация ПАВ на границе раствор - газ Рівноприскорений рух. Прискорення. Рівняння рівноприскореного руху. Розв’язування задач
Рівноприскорений рух. Прискорення. Рівняння рівноприскореного руху. Розв’язування задач Аттестационная работа. Программа для отделения НО “Юный физик” для учащихся 7-9 классов
Аттестационная работа. Программа для отделения НО “Юный физик” для учащихся 7-9 классов Презентация по физике "Физика для всех" - скачать
Презентация по физике "Физика для всех" - скачать  Зубчатые передачи
Зубчатые передачи Общий физический практикум. Введение в технику эксперимента. Описания задач
Общий физический практикум. Введение в технику эксперимента. Описания задач Аттестационная работа. Использование проектно-исследовательской деятельности на уроках физики
Аттестационная работа. Использование проектно-исследовательской деятельности на уроках физики Задачи по МДК
Задачи по МДК Классификация редукторов
Классификация редукторов Реконструкция систем электроснабжения и релейной защиты подстанции 110/10 кВ Иваново
Реконструкция систем электроснабжения и релейной защиты подстанции 110/10 кВ Иваново Магнитное поле в веществе. (Лекция 17)
Магнитное поле в веществе. (Лекция 17) Презентация по физике "Применение правила равновесия рычага к блоку" - скачать
Презентация по физике "Применение правила равновесия рычага к блоку" - скачать  Фемтомагнетизм и сверхбыстрое оптическое перемагничивание Орлова Наталья Борисовна
Фемтомагнетизм и сверхбыстрое оптическое перемагничивание Орлова Наталья Борисовна Открытие нейтрона и протона
Открытие нейтрона и протона домашняя лаб. работа
домашняя лаб. работа Электрическое поле. Электризация тел (Тест)
Электрическое поле. Электризация тел (Тест) Проводники в электростатическом поле
Проводники в электростатическом поле Уравнения Максвелла
Уравнения Максвелла Основные модели прочностной надежности
Основные модели прочностной надежности Периодический закон в свете учения о строении атома. Лекция 1
Периодический закон в свете учения о строении атома. Лекция 1 Презентация по физике "Вычисление массы и объема тела" - скачать бесплатно
Презентация по физике "Вычисление массы и объема тела" - скачать бесплатно Использование энергии солнца на земле
Использование энергии солнца на земле Решение задач
Решение задач МОЛЕКУЛЯРНАЯ ФИЗИКА .
МОЛЕКУЛЯРНАЯ ФИЗИКА .  Сила. Сила тяжести (7 класс)
Сила. Сила тяжести (7 класс)