- Точность систем автоматического управления

Содержание
- 2. 1)Понятие точности. Постоянные ошибки Основным назначением системы является как можно более точное воспроизведение управляющего сигнала. Точность
- 3. Структурная схема стандартной САУ имеет вид Изображение ошибки имеет вид Ошибка системы определяется суммой двух составляющих:
- 4. При определенных типах воздействий и определенной структуре системы установившаяся ошибка в системе будет постоянной и может
- 5. Пусть передаточная функция разомкнутой системы имеет вид При подставлении в (2) имеем (3) Если - статическая
- 6. (4) Если - коэффициент ошибки по скорости - ошибка системы по скорости
- 7. (5) Если - коэффициент ошибки по ускорению - ошибка системы по ускорению. Из приведенных выражений следует,
- 8. Переходные процессы в различных системах при отработке скачка по положению и скорости: 1 – для статической
- 9. Рассмотрим влияние порядка астатизма на точность отработки задающего воздействия
- 11. Пример: Пусть имеем структурную схему системы в виде Рассмотрим влияние параметров системы на величину установившейся ошибки,
- 12. установившаяся ошибка будет равна Изображение сигнала ошибки имеет вид Подставляя в это выражение Таким образом, установившаяся
- 13. Пусть имеем систему в виде Установившаяся ошибка будет равна Изображение сигнала ошибки имеет вид Система обладает
- 14. 2) Установившиеся ошибки при произвольном входном сигнале Коэффициенты ci носят название коэффициентов ошибок и характеризуют, с
- 15. Если В статической системе ν=0 Для системы с астатизмом первого порядка ν=1 Аналогично можно показать, что
- 16. На практике используется следующий способ нахождения коэффициентов ошибок (9) Так как то, деля полином числителя на
- 17. Величина коэффициентов ошибок в конечном итоге определяет величину ошибки в системе. Из изложенного следует, что величины
- 18. Деля полином числителя на полином знаменателя, получим Определим установившуюся ошибку в системе при воздействии
- 19. Пример: Пусть передаточная функция разомкнутой системы имеет вид Найти первые четыре коэффициента ошибок. Передаточная функция замкнутой
- 20. Деля полином числителя на полином знаменателя, получим Находим
- 21. 3) Установившиеся ошибки при гармоническом воздействии Главная передаточная функция замкнутой системы имеет вид Входной сигнал задан
- 22. Аналогично, зная передаточную функцию по ошибке, можно найти закон изменения ошибки в установившемся режиме при гармоническом
- 23. Из (12), (13) можно получить ошибки воспроизведения амплитуды гармонического сигнала на заданной частоте, равные (14) (15)
- 24. Под полосой пропускания системы понимают диапазон частот (16) Полоса пропускания является важной характеристикой системы. С одной
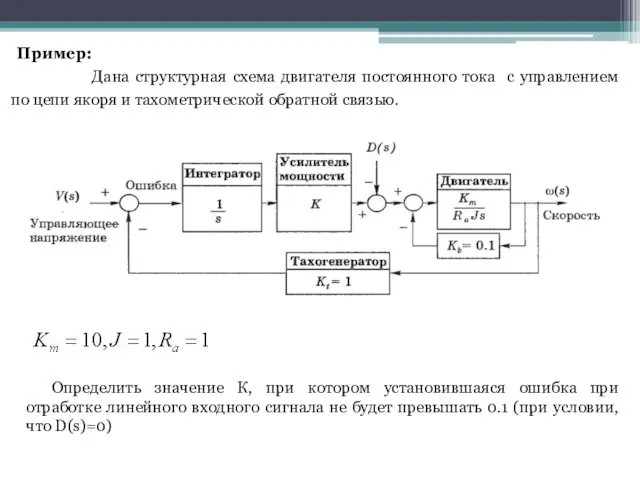
- 25. Пример: Дана структурная схема двигателя постоянного тока с управлением по цепи якоря и тахометрической обратной связью.
- 26. Передаточная функция разомкнутой системы будет иметь вид Передаточная функция замкнутой системы по ошибке
- 27. Установившаяся ошибка Найдем значение К при котором установившаяся не будет превышать 0.1 Входной сигнал имеет вид
- 28. Установившаяся ошибка e=0.1 v(t) y(t)
- 29. Найдем значение К при котором установившаяся не будет превышать 0.1 Входной сигнал имеет вид При К=1,
- 37. Скачать презентацию
1)Понятие точности. Постоянные ошибки
Основным назначением системы является как можно более точное
1)Понятие точности. Постоянные ошибки
Основным назначением системы является как можно более точное
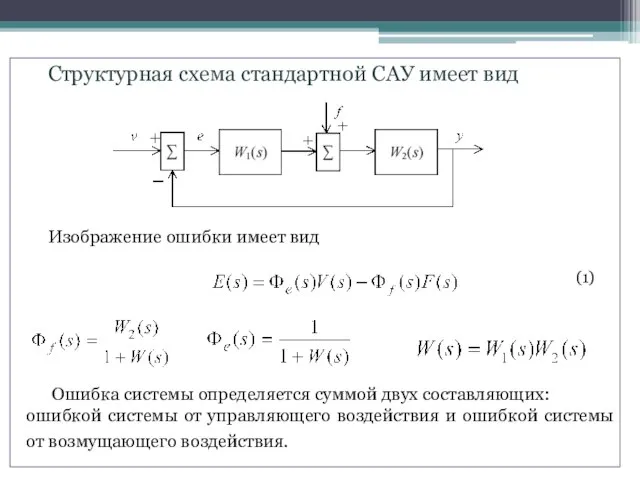
Структурная схема стандартной САУ имеет вид
Изображение ошибки имеет вид
Ошибка системы определяется
Структурная схема стандартной САУ имеет вид
Изображение ошибки имеет вид
Ошибка системы определяется
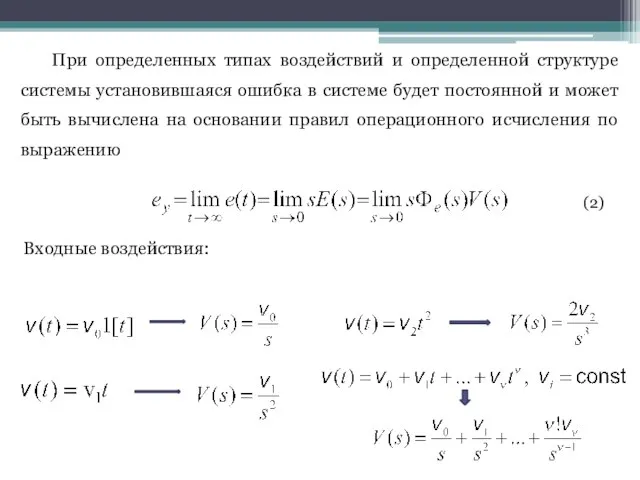
При определенных типах воздействий и определенной структуре системы установившаяся ошибка в
При определенных типах воздействий и определенной структуре системы установившаяся ошибка в
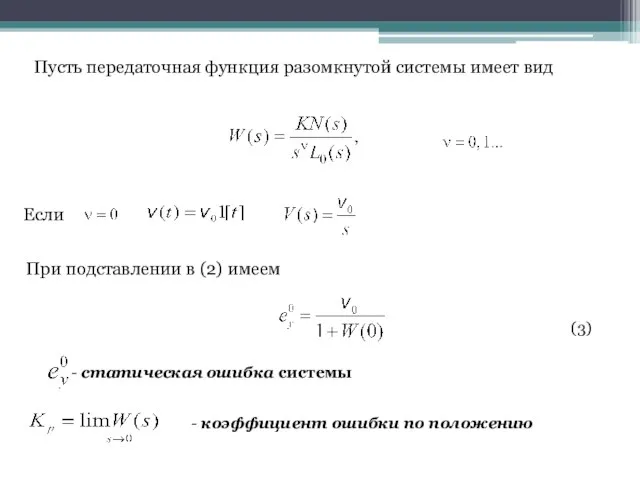
Пусть передаточная функция разомкнутой системы имеет вид
При подставлении в (2) имеем
(3)
Если
-
Пусть передаточная функция разомкнутой системы имеет вид
При подставлении в (2) имеем
(3)
Если
-
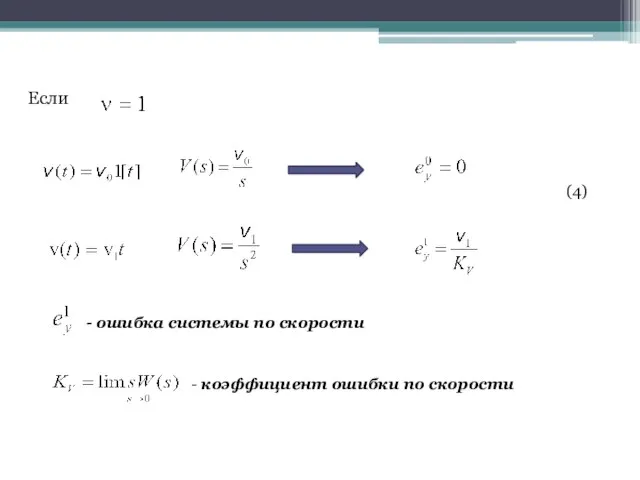
(4)
Если
- коэффициент ошибки по скорости
- ошибка системы по скорости
(4)
Если
- коэффициент ошибки по скорости
- ошибка системы по скорости

(5)
Если
- коэффициент ошибки по ускорению
- ошибка системы по ускорению.
Из приведенных выражений
(5)
Если
- коэффициент ошибки по ускорению
- ошибка системы по ускорению.
Из приведенных выражений
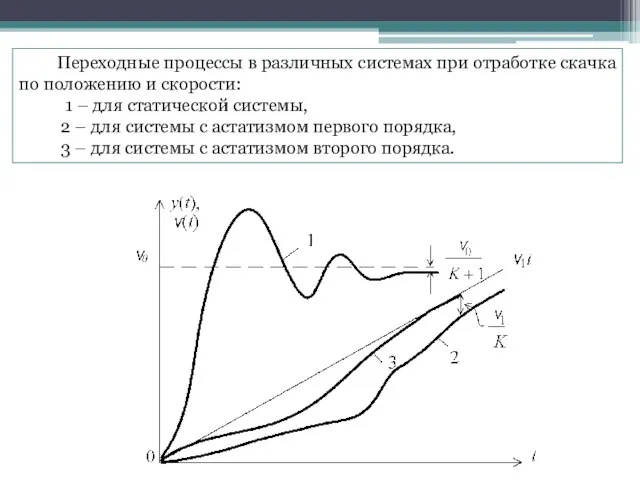
Переходные процессы в различных системах при отработке скачка по положению и
Переходные процессы в различных системах при отработке скачка по положению и

Рассмотрим влияние порядка астатизма на точность отработки задающего воздействия
Рассмотрим влияние порядка астатизма на точность отработки задающего воздействия


Пример: Пусть имеем структурную схему системы в виде
Рассмотрим влияние параметров системы
Пример: Пусть имеем структурную схему системы в виде
Рассмотрим влияние параметров системы
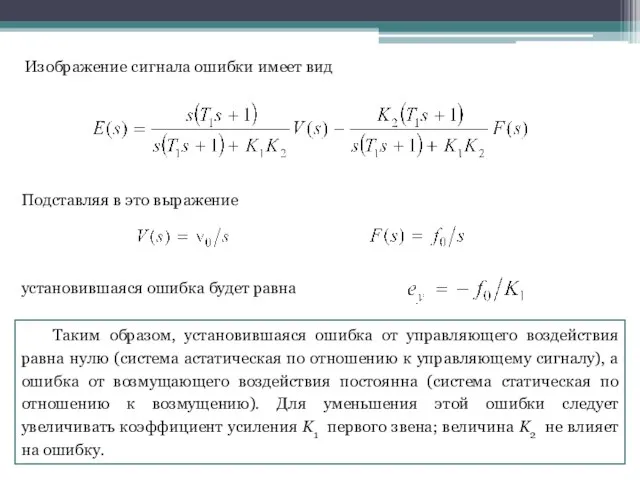
установившаяся ошибка будет равна
Изображение сигнала ошибки имеет вид
Подставляя в это выражение
установившаяся ошибка будет равна
Изображение сигнала ошибки имеет вид
Подставляя в это выражение
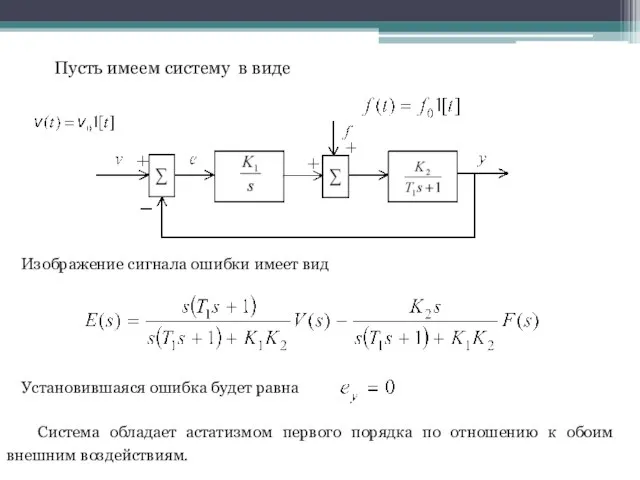
Пусть имеем систему в виде
Установившаяся ошибка будет равна
Изображение сигнала ошибки имеет
Пусть имеем систему в виде
Установившаяся ошибка будет равна
Изображение сигнала ошибки имеет
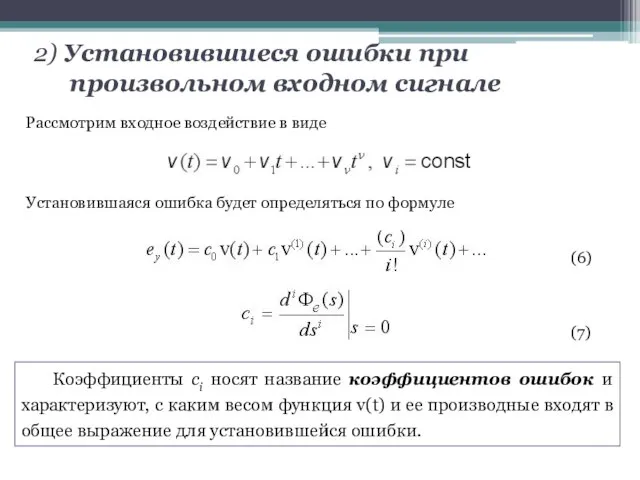
2) Установившиеся ошибки при произвольном входном сигнале
Коэффициенты ci носят название коэффициентов
2) Установившиеся ошибки при произвольном входном сигнале
Коэффициенты ci носят название коэффициентов

Если
В статической системе ν=0
Для системы с астатизмом первого порядка
Если
В статической системе ν=0
Для системы с астатизмом первого порядка

На практике используется следующий способ нахождения коэффициентов ошибок
(9)
Так как
то, деля
На практике используется следующий способ нахождения коэффициентов ошибок
(9)
Так как
то, деля

Величина коэффициентов ошибок в конечном итоге определяет величину ошибки в системе.
Величина коэффициентов ошибок в конечном итоге определяет величину ошибки в системе.
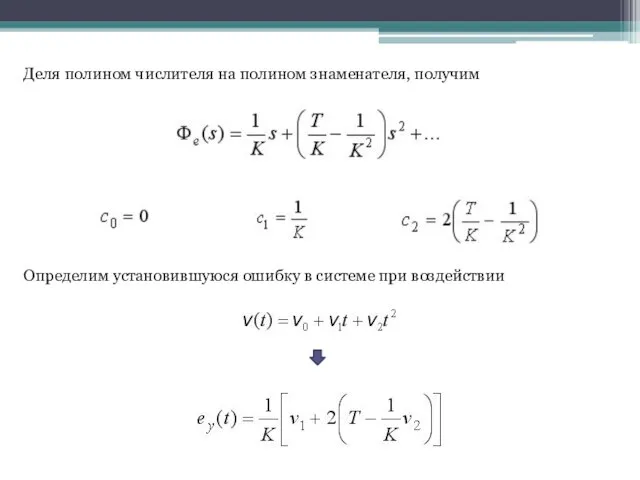
Деля полином числителя на полином знаменателя, получим
Определим установившуюся ошибку в
Деля полином числителя на полином знаменателя, получим
Определим установившуюся ошибку в

Пример: Пусть передаточная функция разомкнутой системы имеет вид
Найти первые четыре коэффициента
Пример: Пусть передаточная функция разомкнутой системы имеет вид
Найти первые четыре коэффициента

Деля полином числителя на полином знаменателя, получим
Находим
Деля полином числителя на полином знаменателя, получим
Находим
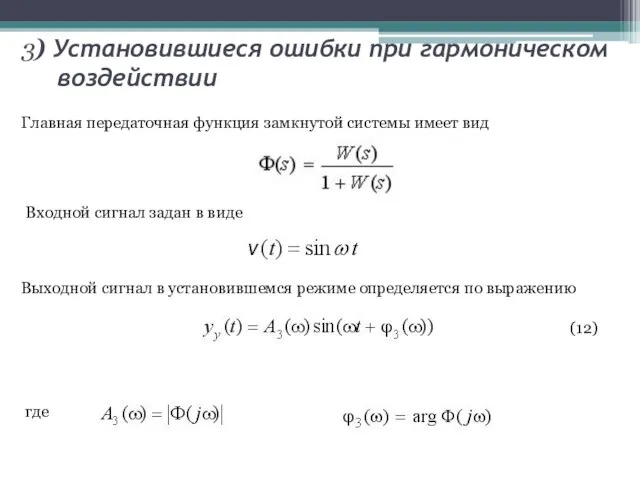
3) Установившиеся ошибки при гармоническом воздействии
Главная передаточная функция замкнутой системы имеет
3) Установившиеся ошибки при гармоническом воздействии
Главная передаточная функция замкнутой системы имеет

Аналогично, зная передаточную функцию по ошибке, можно найти закон изменения ошибки
Аналогично, зная передаточную функцию по ошибке, можно найти закон изменения ошибки

Из (12), (13) можно получить ошибки воспроизведения амплитуды гармонического сигнала на
Из (12), (13) можно получить ошибки воспроизведения амплитуды гармонического сигнала на
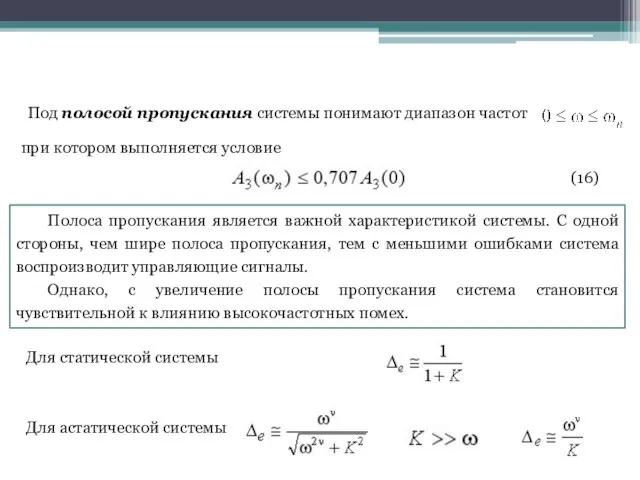
Под полосой пропускания системы понимают диапазон частот
(16)
Полоса пропускания является важной
Под полосой пропускания системы понимают диапазон частот
(16)
Полоса пропускания является важной
Пример:
Дана структурная схема двигателя постоянного тока с управлением по цепи
Пример:
Дана структурная схема двигателя постоянного тока с управлением по цепи
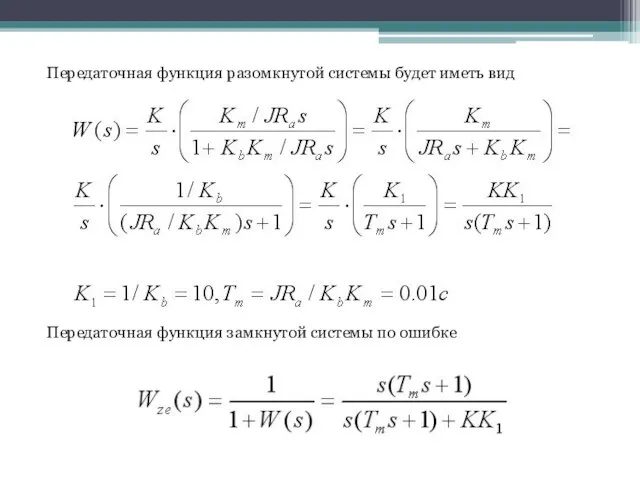
Передаточная функция разомкнутой системы будет иметь вид
Передаточная функция замкнутой системы по
Передаточная функция разомкнутой системы будет иметь вид
Передаточная функция замкнутой системы по

Установившаяся ошибка
Найдем значение К при котором установившаяся не будет превышать 0.1
Установившаяся ошибка
Найдем значение К при котором установившаяся не будет превышать 0.1

Установившаяся ошибка
e=0.1
v(t)
y(t)
Установившаяся ошибка
e=0.1
v(t)
y(t)
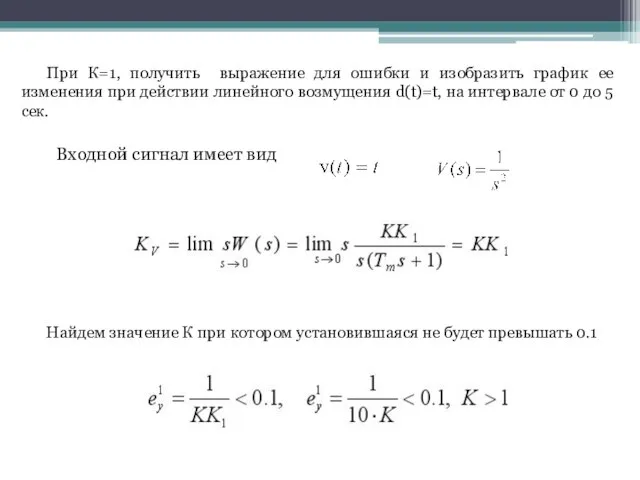
Найдем значение К при котором установившаяся не будет превышать 0.1
Входной
Найдем значение К при котором установившаяся не будет превышать 0.1
Входной






 Точные и приближенные методы
Точные и приближенные методы Введение. Машины и их классификация
Введение. Машины и их классификация Закон сохранения импульса
Закон сохранения импульса Сила тяжести. Вес тела
Сила тяжести. Вес тела Анализ сложной линейной электрической цепи постоянного тока
Анализ сложной линейной электрической цепи постоянного тока Действие жидкости и газа на погруженное в них тело
Действие жидкости и газа на погруженное в них тело Динамічні оптичні ілюзії – 3
Динамічні оптичні ілюзії – 3 Технология магнитопорошкового метода контроля
Технология магнитопорошкового метода контроля Уравнение Шрёдингера, волновая функция
Уравнение Шрёдингера, волновая функция Оптичні ілюзії
Оптичні ілюзії Разборка – сборка кривошипно шатунного механизма двигателей автомобилей ЗИЛ – 508.10, ВАЗ – 2106 и ВАЗ -21083
Разборка – сборка кривошипно шатунного механизма двигателей автомобилей ЗИЛ – 508.10, ВАЗ – 2106 и ВАЗ -21083 Автоматизация расчета высших гармоник в электрических сетях предприятия
Автоматизация расчета высших гармоник в электрических сетях предприятия Основы электронной оптики
Основы электронной оптики Дисперсиялык талдаудын бір факторлы параметрлік емес үқсастығы критерий - Крускал Уоллис критерийі
Дисперсиялык талдаудын бір факторлы параметрлік емес үқсастығы критерий - Крускал Уоллис критерийі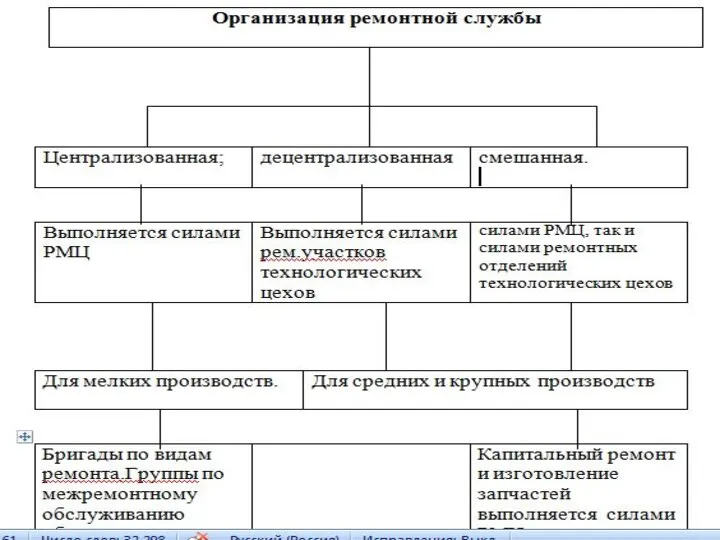 Организация ремонтной службы
Организация ремонтной службы API 11. Ходовая часть
API 11. Ходовая часть Физика и техника
Физика и техника Теория электрических цепей
Теория электрических цепей Типовые компоновки сварки кольцевых швов
Типовые компоновки сварки кольцевых швов Механика. Механическое движение. Разделы механики
Механика. Механическое движение. Разделы механики Геометрическая оптика
Геометрическая оптика Давление. Единицы давления
Давление. Единицы давления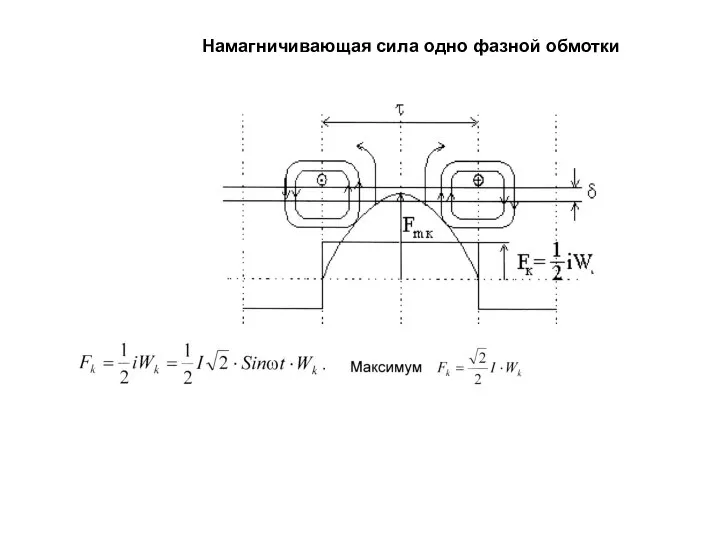 Намагничивающая сила одно фазной обмотки. (Лекция 7)
Намагничивающая сила одно фазной обмотки. (Лекция 7) Ионизирующие излучения ядерного взрыва, космического пространства, ядерных энергетических установок и аварий на АЭС
Ионизирующие излучения ядерного взрыва, космического пространства, ядерных энергетических установок и аварий на АЭС Пара сил (лекция 5)
Пара сил (лекция 5) Элекромагнитная индукция
Элекромагнитная индукция Презентация по физике "Лев Ландау" - скачать бесплатно
Презентация по физике "Лев Ландау" - скачать бесплатно Жозе́ф Луи́ Гей-Люсса́к
Жозе́ф Луи́ Гей-Люсса́к