- Пространственная система сил. (Тема 1.5)

Содержание
- 2. Студент должен: иметь представление: - о пространственных системах сил и их действии на тело.
- 3. Знать: - момент силы относительно оси, свойства момента; - аналитический способ определения равнодействующей; -условия равновесия.
- 4. Уметь: -выполнять разложение силы на три взаимно перпендикулярные оси; -определять момент силы относительно оси; -определять реакции
- 5. Пространственная система сил- система сил, линии действия которых расположены в различных плоскостях.
- 6. 1. Пространственная системой сходящихся сил (пространственный пучок сил) Пространственная система сил называется сходящейся, если линии действия
- 7. Теорема о равнодействующей пространственной ССС. Пространственная система сходящихся сил эквивалентна равнодействующей, которая равна векторной сумме этих
- 8. Способы определения равнодействующей силы пространственной системы сходящихся сил: Силовой многоугольник пространственной системы сил не лежит в
- 9. Проекция силы на ось в пространстве а) Сила и ось лежат в одной плоскости Определение проекций
- 10. Проекция силы на ось в пространстве б) Сила и ось не лежат в одной плоскости Для
- 11. Разложение силы по трём осям координат Равнодействующая трёх взаимно перпендикулярных сил равна по модулю и направлена
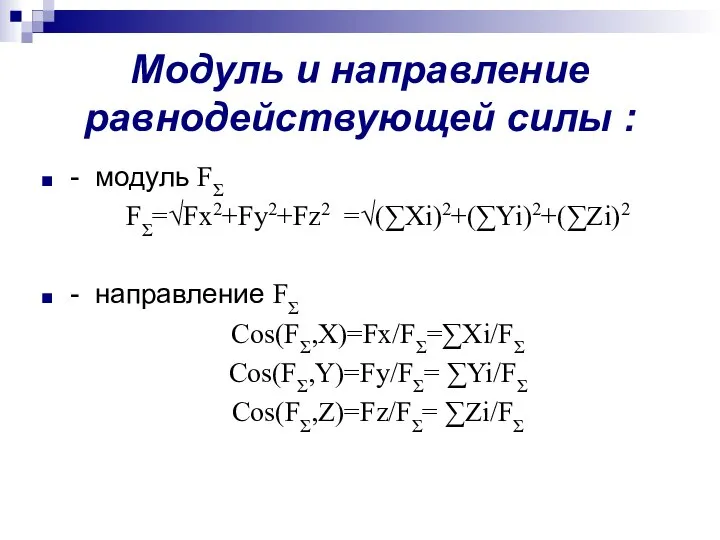
- 12. Модуль и направление равнодействующей силы : - модуль FƩ FƩ=√Fx2+Fy2+Fz2 =√(∑Xi)2+(∑Yi)2+(∑Zi)2 - направление FƩ Cos(FƩ,X)=Fx/FƩ=∑Xi/FƩ Cos(FƩ,Y)=Fy/FƩ=
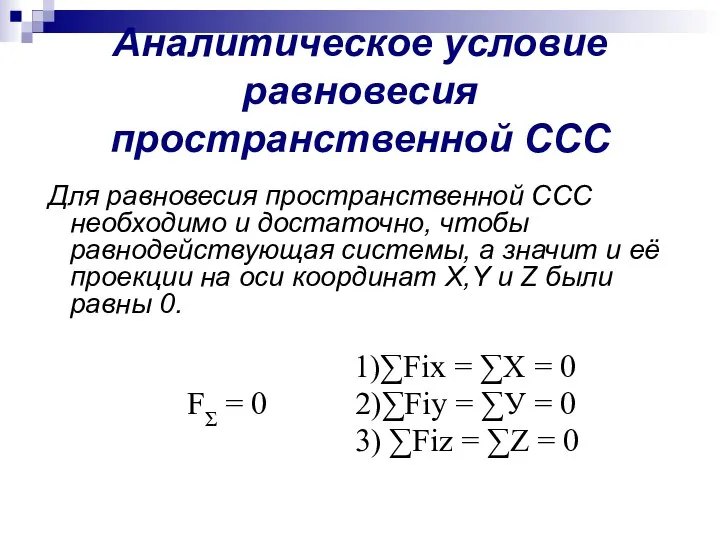
- 13. Аналитическое условие равновесия пространственной ССС Для равновесия пространственной ССС необходимо и достаточно, чтобы равнодействующая системы, а
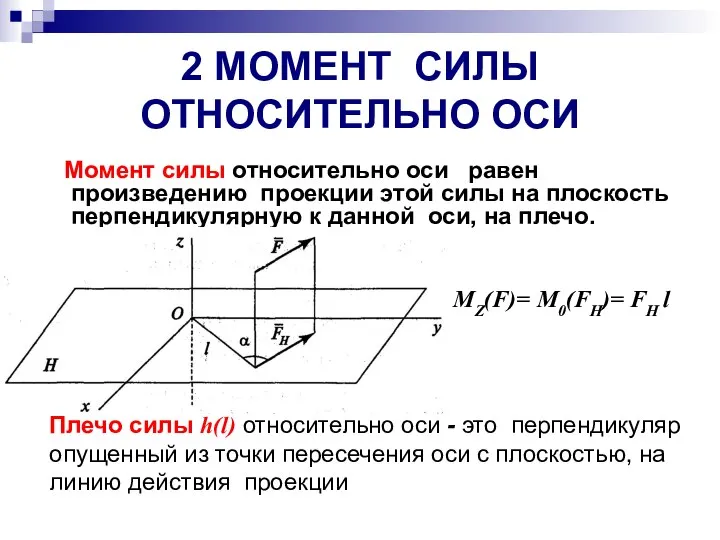
- 14. 2 МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ОСИ Момент силы относительно оси равен произведению проекции этой силы на плоскость
- 15. Правило знаков Момент силы относительно оси будем считать положительным , если сила стремится вызвать вращение против
- 16. Момент силы относительно оси равен нулю в 2 случаях: 1. Если линия действия силы перпендикулярна оси
- 17. Пример: В червячной передаче червяк передает червячному колесу, укрепленному на валу, силу F, не лежащую в
- 18. 3. Пространственная система произвольно расположенных сил - это система сил, линии действия, которых не лежат в
- 19. Приведение произвольной пространственной системы сил к заданному центру (Аналогично плоской системе произвольно расположенных сил – Тема
- 20. Приведение произвольной пространственной системы сил к заданному центру Пространственная система произвольно расположенных сил в общем случае
- 21. Модуль и направление главного вектора : - модуль FГЛ FГЛ=√Fx2+Fy2+Fz2 =√(∑Xi)2+(∑Yi)2+(∑Zi)2 - направление FГЛ Cos(Fгл; x)=
- 22. Модуль главного момента : Алгебраическая сумма моментов всех сил системы относительно каждой оси. МГЛ = √
- 24. Скачать презентацию
Студент должен:
иметь представление:
- о пространственных системах сил и их действии на
Студент должен:
иметь представление:
- о пространственных системах сил и их действии на
Знать:
- момент силы относительно оси, свойства момента;
- аналитический способ определения
Знать: - момент силы относительно оси, свойства момента; - аналитический способ определения
Уметь:
-выполнять разложение силы на три взаимно перпендикулярные оси;
-определять момент силы относительно
Уметь: -выполнять разложение силы на три взаимно перпендикулярные оси; -определять момент силы относительно
Пространственная
система сил-
система сил, линии действия которых расположены в
Пространственная
система сил-
система сил, линии действия которых расположены в

1. Пространственная системой сходящихся сил (пространственный пучок сил)
Пространственная система сил называется
1. Пространственная системой сходящихся сил (пространственный пучок сил)
Пространственная система сил называется
Теорема о равнодействующей пространственной ССС.
Пространственная система сходящихся сил эквивалентна равнодействующей,
Теорема о равнодействующей пространственной ССС. Пространственная система сходящихся сил эквивалентна равнодействующей,
Способы определения равнодействующей силы пространственной системы сходящихся сил:
Силовой многоугольник пространственной
Способы определения равнодействующей силы пространственной системы сходящихся сил:
Силовой многоугольник пространственной
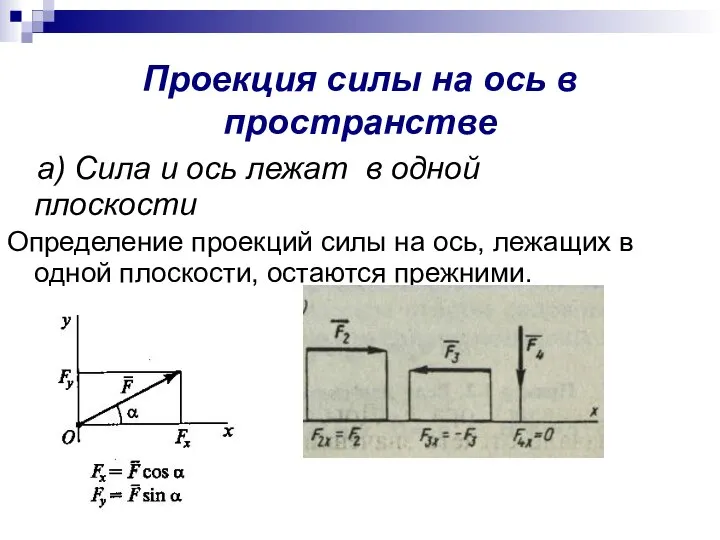
Проекция силы на ось в пространстве
а) Сила и ось лежат
Проекция силы на ось в пространстве
а) Сила и ось лежат
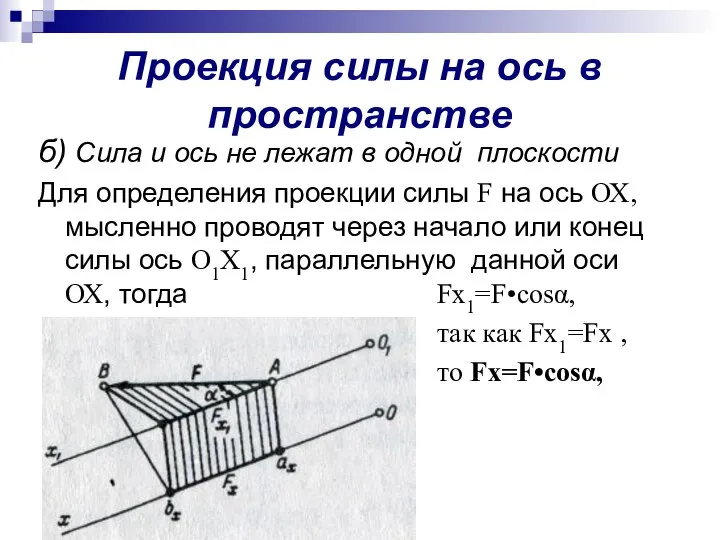
Проекция силы на ось в пространстве
б) Сила и ось не лежат
Проекция силы на ось в пространстве
б) Сила и ось не лежат
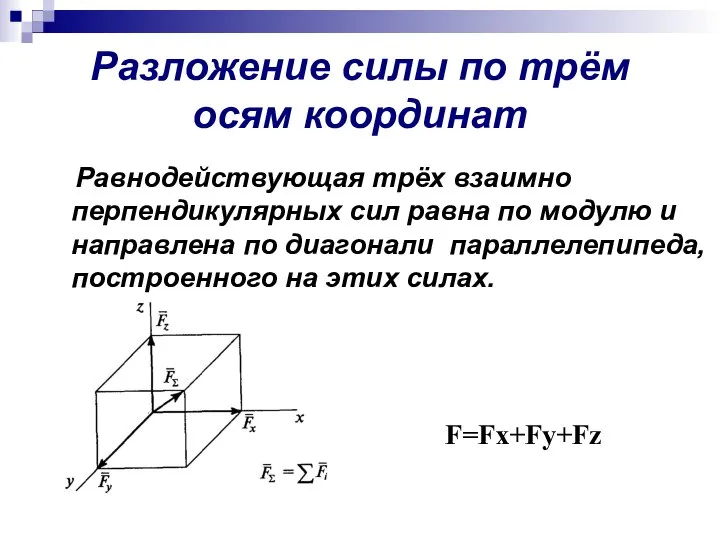
Разложение силы по трём осям координат
Равнодействующая трёх взаимно перпендикулярных сил
Разложение силы по трём осям координат
Равнодействующая трёх взаимно перпендикулярных сил
Модуль и направление равнодействующей силы :
- модуль FƩ
FƩ=√Fx2+Fy2+Fz2 =√(∑Xi)2+(∑Yi)2+(∑Zi)2
-
Модуль и направление равнодействующей силы :
- модуль FƩ
FƩ=√Fx2+Fy2+Fz2 =√(∑Xi)2+(∑Yi)2+(∑Zi)2
-
Аналитическое условие равновесия пространственной ССС
Для равновесия пространственной ССС необходимо
Аналитическое условие равновесия пространственной ССС
Для равновесия пространственной ССС необходимо
2 МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ОСИ
Момент силы относительно оси равен произведению
2 МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ОСИ
Момент силы относительно оси равен произведению
Правило знаков
Момент силы относительно оси будем считать положительным ,
Правило знаков
Момент силы относительно оси будем считать положительным ,
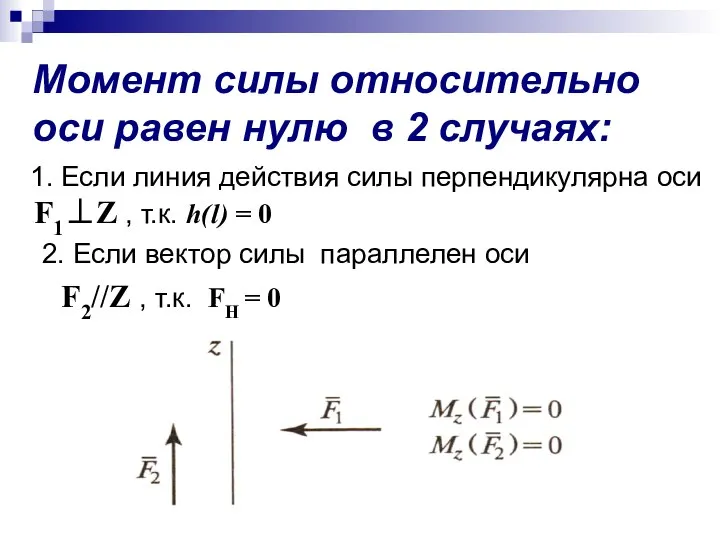
Момент силы относительно оси равен нулю в 2 случаях:
1. Если
Момент силы относительно оси равен нулю в 2 случаях:
1. Если
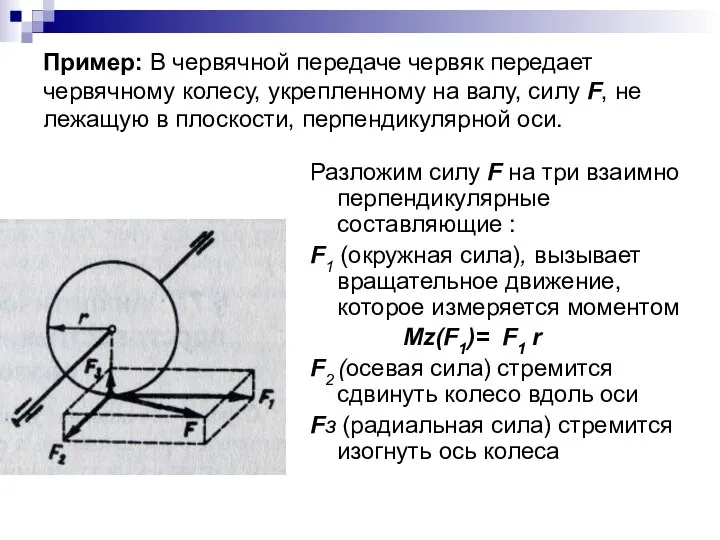
Пример: В червячной передаче червяк передает червячному колесу, укрепленному на валу,
Пример: В червячной передаче червяк передает червячному колесу, укрепленному на валу,
3. Пространственная система произвольно расположенных сил -
это система сил, линии
3. Пространственная система произвольно расположенных сил -
это система сил, линии
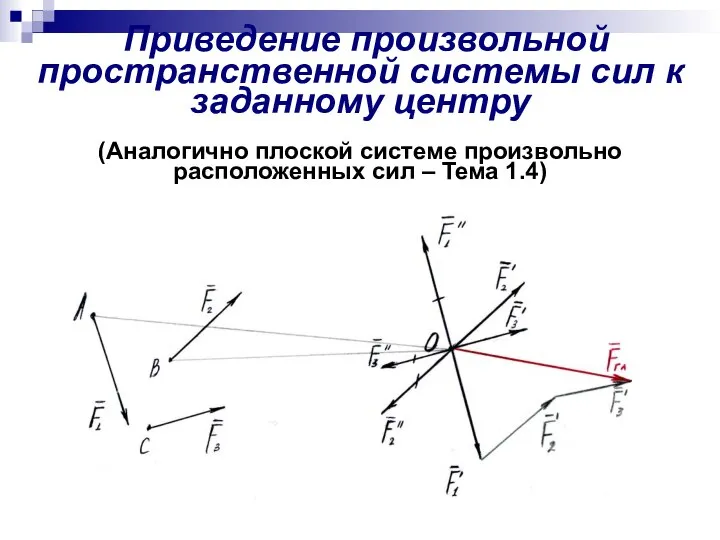
Приведение произвольной пространственной системы сил к заданному центру
(Аналогично плоской
Приведение произвольной пространственной системы сил к заданному центру (Аналогично плоской
Приведение произвольной пространственной системы сил к заданному центру
Пространственная
Приведение произвольной пространственной системы сил к заданному центру
Пространственная
Модуль и направление главного вектора :
- модуль FГЛ
FГЛ=√Fx2+Fy2+Fz2 =√(∑Xi)2+(∑Yi)2+(∑Zi)2
-
Модуль и направление главного вектора :
- модуль FГЛ
FГЛ=√Fx2+Fy2+Fz2 =√(∑Xi)2+(∑Yi)2+(∑Zi)2
-
Модуль главного момента :
Алгебраическая сумма моментов всех сил системы относительно каждой
Модуль главного момента :
Алгебраическая сумма моментов всех сил системы относительно каждой
 Процессы, происходящие в веществе при его бомбардировке электронами
Процессы, происходящие в веществе при его бомбардировке электронами Электромагниттік тербеліс
Электромагниттік тербеліс Фотоны. Внешний фотоэффект
Фотоны. Внешний фотоэффект Elementary interactions: Van der Waals & H-bonds
Elementary interactions: Van der Waals & H-bonds Тепловые излучения и фотоны
Тепловые излучения и фотоны Кінематика поступального та обертального руху
Кінематика поступального та обертального руху Электрическая цепь и электрическая схема
Электрическая цепь и электрическая схема Импульс тела
Импульс тела Энергия. Закон сохранения энергии
Энергия. Закон сохранения энергии Скорость. Единицы скорости
Скорость. Единицы скорости Профессии, связанные с физикой
Профессии, связанные с физикой ДОМАШНЕЕ ЗАДАНИЕ: Составит пять тестовых вопросов по теме «Изменение агрегатного состояния вещества». Предложить к каждому вопр
ДОМАШНЕЕ ЗАДАНИЕ: Составит пять тестовых вопросов по теме «Изменение агрегатного состояния вещества». Предложить к каждому вопр Все виды тепловых двигателей и их краткая характеристика
Все виды тепловых двигателей и их краткая характеристика Электрический ток в металлах
Электрический ток в металлах Эксперимент по физике высоких энергий
Эксперимент по физике высоких энергий Apartment acoustics. Analyzed using the acoustic diffusion equation
Apartment acoustics. Analyzed using the acoustic diffusion equation Электрический ток в различных средах
Электрический ток в различных средах Строение атома
Строение атома Термодинамиканың бірінші заңы
Термодинамиканың бірінші заңы Строение атома. Опыты резерфорда
Строение атома. Опыты резерфорда Теплоенергетика. Типи теплових електростанцій
Теплоенергетика. Типи теплових електростанцій Поляризация. Лекция 5
Поляризация. Лекция 5 Определение ускорения тела при равноускоренном движении. Лабораторная работа №1
Определение ускорения тела при равноускоренном движении. Лабораторная работа №1 Өз құрылымы мен құрамы болмайтын бөлшекті
Өз құрылымы мен құрамы болмайтын бөлшекті ВЛ-60 Электровозының механикалық бөлігі
ВЛ-60 Электровозының механикалық бөлігі Презентацию выполнила ученица 8 «В» класса школы №50 Христофорова Анастасия Энергия топлива. Удельная теплота сгорания.
Презентацию выполнила ученица 8 «В» класса школы №50 Христофорова Анастасия Энергия топлива. Удельная теплота сгорания. Основные положения теории трения полимерных материалов. Металлополимерные системы. Основные закономерности изнашивания
Основные положения теории трения полимерных материалов. Металлополимерные системы. Основные закономерности изнашивания Нагрузки, действующие на элементы наземной космической инфраструктуры
Нагрузки, действующие на элементы наземной космической инфраструктуры