Создание ракеты-носителя для запуска аппарата с массогабаритными характеристиками, соответствующими спутнику
- Создание ракеты-носителя для запуска аппарата с массогабаритными характеристиками, соответствующими спутнику

Содержание
- 2. Представление команды проекта Юрий Ярадаев – капитан, технические идеи, технологический процесс, сборка и монтаж Данила Егоров
- 3. Цель проекта: создание ракеты-носителя для запуска аппарата, с массогабаритными характеристиками, соответствующими «спутнику» Регулярной лиги чемпионата Задачи
- 4. Улучшение конструкции РН в новом сезоне: О Б Т Е К А Т Е Л ь
- 5. Сборочный чертеж РН 1-головной обтекатель 2-отсек полезной нагрузки 3-соединительная втулка 4 – двигательный отсек 5 -
- 6. Деталирование
- 7. Создание 3D модели в программе Open rocket
- 8. 3D модель, выполненная в программе Open rocket
- 9. Баллистический расчет траектории РН
- 10. Конструктивные решения- обтекатель оживальной формы уменьшает сопротивление воздуха
- 11. Двигатель РД1-100 - 7 M твердотопливный для моделей ракет ТЕХНИЧЕСКАЯ ХАРАКТЕРИСТИКА Диаметр наружный 29 мм Длина
- 12. Технология изготовления РН
- 13. Изготовление переходной втулки Изготовление заглушки
- 15. Изготовление толкателя Изготовление прижимной пластины (двигательный отсек)
- 16. Характеристики РН Масса РН - 523 г Стартовая масса РН -1073 г Габаритные размеры: 930x76 мм
- 17. Силы, действующие на ракету в полете на активном участке Fтяги двигателя влечет ракету вперед, разгоняет ее
- 18. Силы, действующие на ракету в полете на пассивном участке Fсопр. воздуха препятствует движению ракеты Fтяжести тянет
- 19. Система спасения, расчет парашюта А – общая площадь парашюта C – коэффициент сопротивления парашюта. Это значение
- 20. Испытание системы спасения Высота падения – 15 м Среднее время падения – 2с
- 21. Меры безопасности МАТЕРИАЛЫ. Использовать только легкие, неметаллические детали для носа, корпуса и оперения ракеты ДВИГАТЕЛЬ. Использовать
- 22. План – график работы по проекту Вхождение в проект, изучение материалов, технической документации – октябрь 2018
- 23. Бюджет проекта
- 24. Проектно – исследовательская задача Cоздание системы, обеспечивающей траекторные измерения в ходе полета РН от момента старта
- 25. В качестве основного «мозга» системы был выбран МК Arduino NANO на чипе Atmega 328P. Для регистрации
- 26. Для создания системы поиска РН используется GPS приемник GY-NEO6MV2 и GSM передатчик SIM800L, подключенные к МК.
- 27. Обоснование выбора Доступность(Распространенность МК, датчиков и модулей) Дешевизна Простота написания кода (понятный язык программирования C++) Компактность
- 28. Общие сведения(характеристики) электроники Барометрический датчик давления - BMP280 Питание- 3.3V Подключение – I2C, SPI Гироскоп-акселерометр –
- 29. Обоснование выбора GPS передатчика и GSM модуля (sim800L)
- 30. Схема устройства
- 31. Алгоритм Работы BMP280 и Gy-521 Цикл, запись данных 4 раза в секунду
- 32. Алгоритм работы GSM модуля SIM800l
- 33. Проблемы которые могут возникнуть при программировании и их решение 1.Нехватка памяти для хранения скетча при использовании
- 34. Сравнение мк Arduino nano и stm32 stm32 Частота-72Мгц Flash/Ram память- 64/20 Кбайт Битность АЦП-12 Напряжение питания
- 35. РН для проверки устройства Головной обтекатель, для загрузки устройства
- 37. Скачать презентацию
Представление команды проекта
Юрий Ярадаев – капитан, технические идеи, технологический процесс, сборка
Представление команды проекта
Юрий Ярадаев – капитан, технические идеи, технологический процесс, сборка
Цель проекта: создание ракеты-носителя для запуска аппарата,
с массогабаритными характеристиками, соответствующими
Цель проекта: создание ракеты-носителя для запуска аппарата, с массогабаритными характеристиками, соответствующими

Улучшение конструкции РН в новом сезоне:
О
Б
Т
Е
К
А
Т
Е
Л
ь
С
Т
А
Б
И
Л
И
З
А
Т
О
р
Ф
О
Р
М
А
Дв
О
Т
С
Е
к
Улучшение конструкции РН в новом сезоне:
О
Б
Т
Е
К
А
Т
Е
Л
ь
С
Т
А
Б
И
Л
И
З
А
Т
О
р
Ф
О
Р
М
А
Дв
О
Т
С
Е
к

Сборочный чертеж РН
1-головной обтекатель
2-отсек полезной нагрузки
3-соединительная втулка
4 – двигательный отсек
5 -
Сборочный чертеж РН
1-головной обтекатель
2-отсек полезной нагрузки
3-соединительная втулка
4 – двигательный отсек
5 -
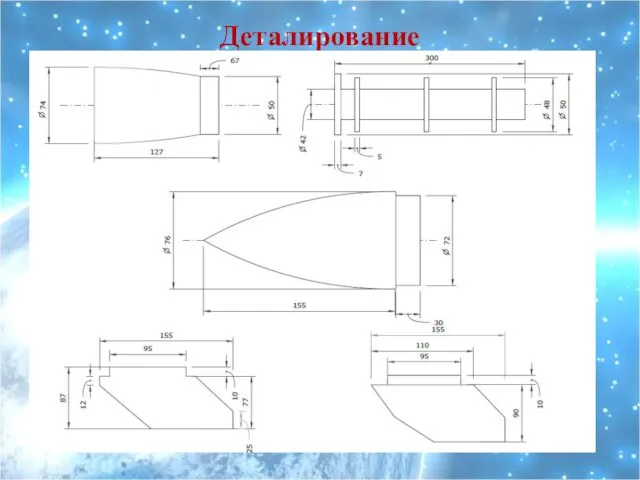
Деталирование
Деталирование
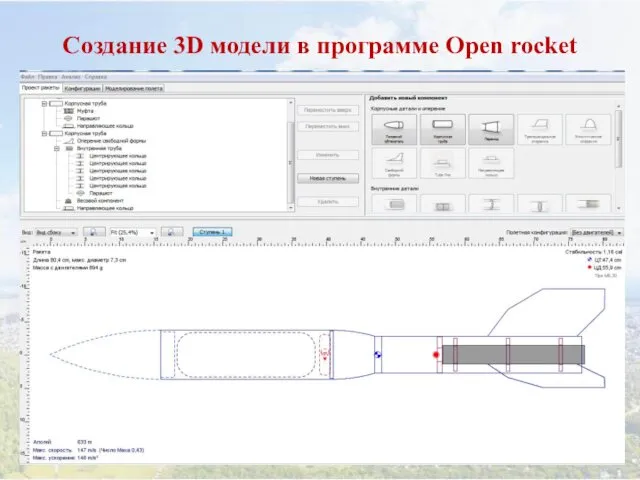
Создание 3D модели в программе Open rocket
Создание 3D модели в программе Open rocket
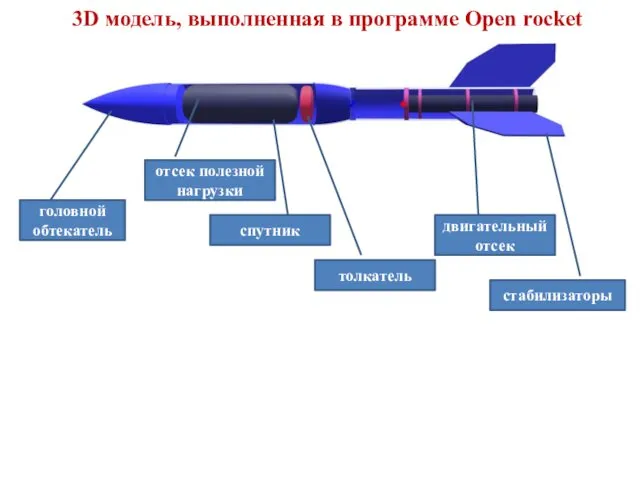
3D модель, выполненная в программе Open rocket
3D модель, выполненная в программе Open rocket
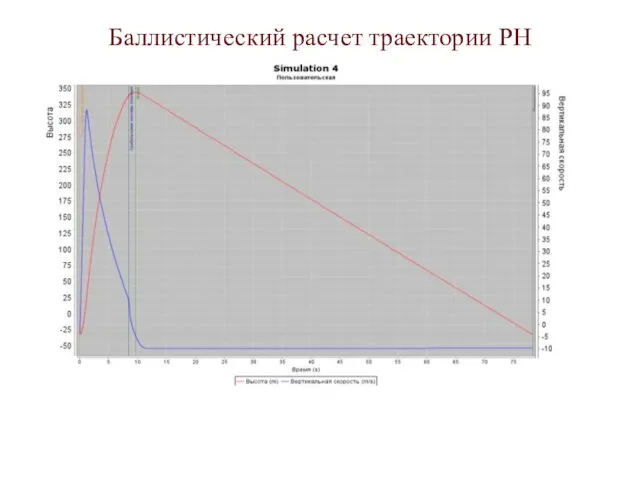
Баллистический расчет траектории РН
Баллистический расчет траектории РН
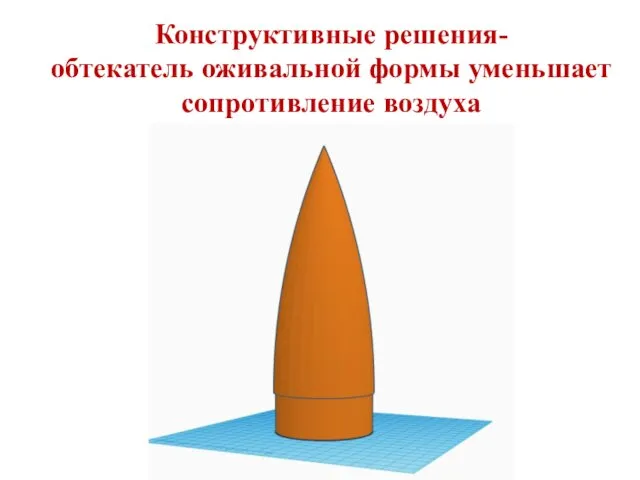
Конструктивные решения-
обтекатель оживальной формы уменьшает сопротивление воздуха
Конструктивные решения-
обтекатель оживальной формы уменьшает сопротивление воздуха
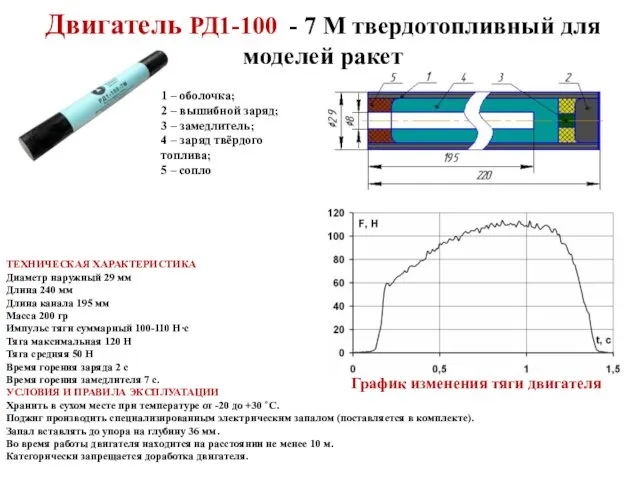
Двигатель РД1-100 - 7 M твердотопливный для моделей ракет
ТЕХНИЧЕСКАЯ ХАРАКТЕРИСТИКА
Диаметр наружный
Двигатель РД1-100 - 7 M твердотопливный для моделей ракет
ТЕХНИЧЕСКАЯ ХАРАКТЕРИСТИКА Диаметр наружный
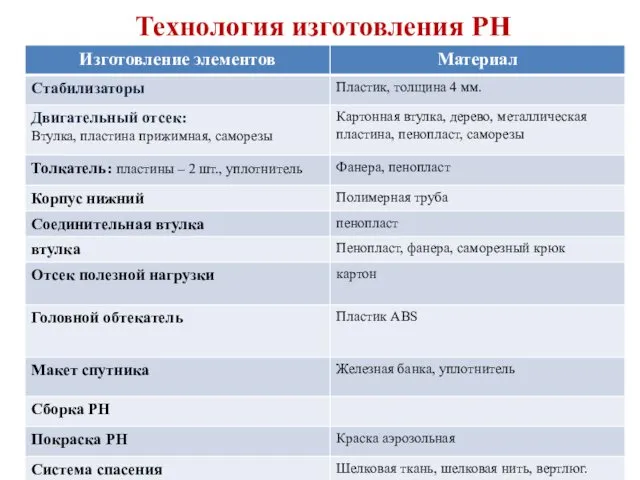
Технология изготовления РН
Технология изготовления РН

Изготовление переходной втулки
Изготовление заглушки
Изготовление переходной втулки
Изготовление заглушки


Изготовление толкателя
Изготовление прижимной пластины (двигательный отсек)
Изготовление толкателя
Изготовление прижимной пластины (двигательный отсек)
Характеристики РН
Масса РН - 523 г
Стартовая масса РН -1073 г
Габаритные
Характеристики РН
Масса РН - 523 г
Стартовая масса РН -1073 г
Габаритные

Силы, действующие на ракету в полете на активном участке
Fтяги двигателя влечет
Силы, действующие на ракету в полете на активном участке
Fтяги двигателя влечет
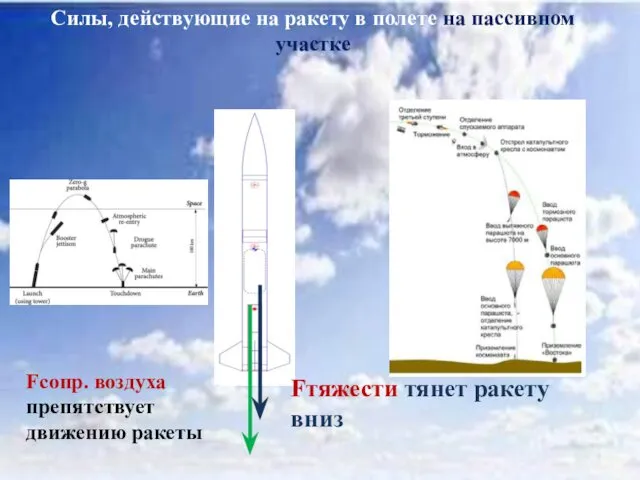
Силы, действующие на ракету в полете на пассивном участке
Fсопр. воздуха препятствует
Силы, действующие на ракету в полете на пассивном участке
Fсопр. воздуха препятствует
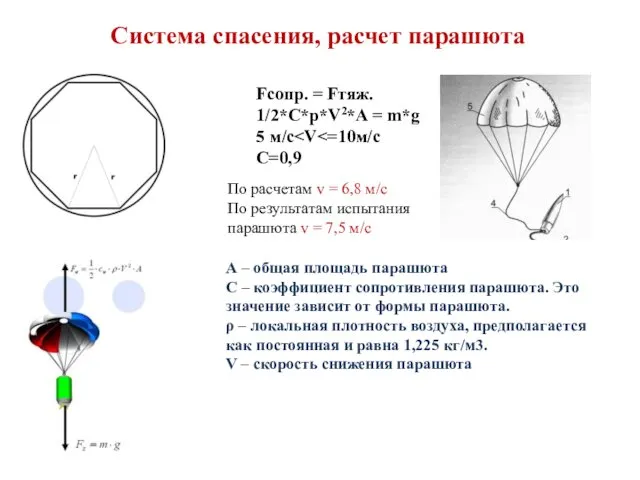
Система спасения, расчет парашюта
А – общая площадь парашюта
C – коэффициент
Система спасения, расчет парашюта
А – общая площадь парашюта
C – коэффициент

Испытание системы спасения
Высота падения – 15 м
Среднее время падения – 2с
Испытание системы спасения
Высота падения – 15 м
Среднее время падения – 2с
Меры безопасности
МАТЕРИАЛЫ. Использовать только легкие, неметаллические детали для носа, корпуса и
Меры безопасности
МАТЕРИАЛЫ. Использовать только легкие, неметаллические детали для носа, корпуса и
План – график работы по проекту
Вхождение в проект, изучение материалов, технической
План – график работы по проекту
Вхождение в проект, изучение материалов, технической
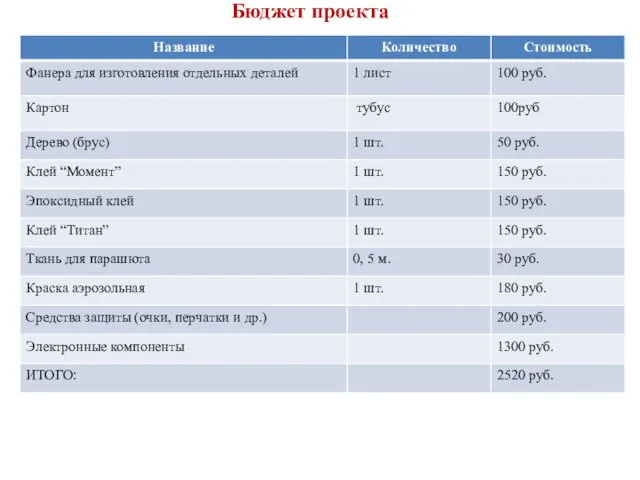
Бюджет проекта
Бюджет проекта
Проектно – исследовательская задача
Cоздание системы, обеспечивающей траекторные измерения в ходе полета
Проектно – исследовательская задача
Cоздание системы, обеспечивающей траекторные измерения в ходе полета

В качестве основного «мозга» системы был выбран МК Arduino NANO на

Для создания системы поиска РН используется GPS приемник GY-NEO6MV2 и GSM
Для создания системы поиска РН используется GPS приемник GY-NEO6MV2 и GSM
Обоснование выбора
Доступность(Распространенность МК, датчиков и модулей)
Дешевизна
Простота написания кода (понятный язык программирования
Обоснование выбора
Доступность(Распространенность МК, датчиков и модулей)
Дешевизна
Простота написания кода (понятный язык программирования
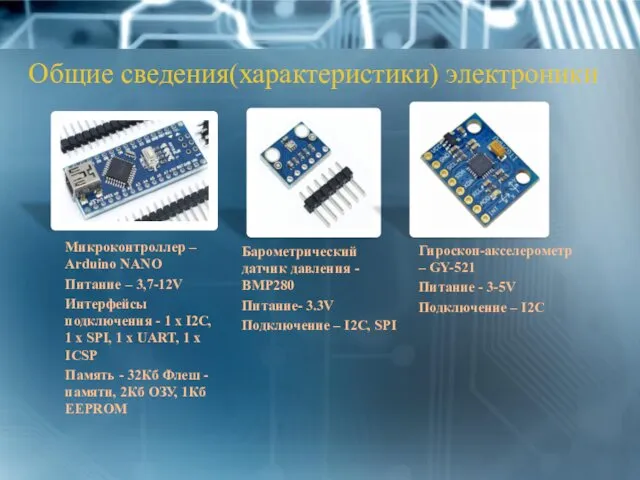
Общие сведения(характеристики) электроники
Барометрический датчик давления - BMP280
Питание- 3.3V
Подключение – I2C, SPI
Гироскоп-акселерометр
Общие сведения(характеристики) электроники
Барометрический датчик давления - BMP280
Питание- 3.3V
Подключение – I2C, SPI
Гироскоп-акселерометр

Обоснование выбора GPS передатчика и
GSM модуля (sim800L)
Обоснование выбора GPS передатчика и
GSM модуля (sim800L)
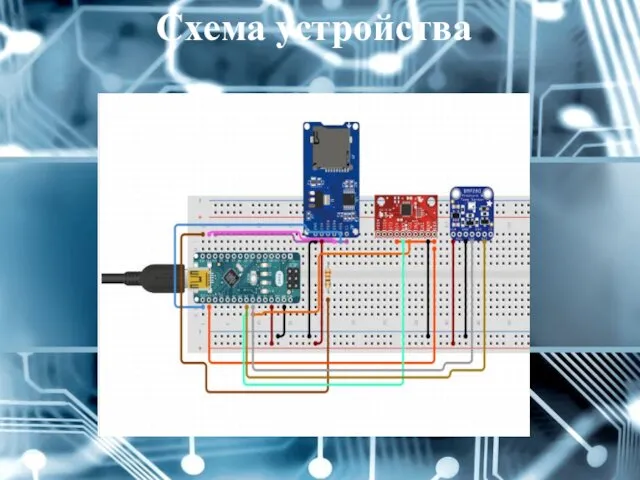
Схема устройства
Схема устройства

Алгоритм Работы BMP280 и Gy-521
Цикл, запись данных 4 раза в секунду
Алгоритм Работы BMP280 и Gy-521
Цикл, запись данных 4 раза в секунду

Алгоритм работы GSM модуля SIM800l
Алгоритм работы GSM модуля SIM800l
Проблемы которые могут возникнуть при программировании и их решение
1.Нехватка памяти для
Проблемы которые могут возникнуть при программировании и их решение
1.Нехватка памяти для

Сравнение мк Arduino nano и stm32
stm32
Частота-72Мгц
Flash/Ram память- 64/20 Кбайт
Битность АЦП-12
Напряжение питания
Сравнение мк Arduino nano и stm32
stm32
Частота-72Мгц
Flash/Ram память- 64/20 Кбайт
Битность АЦП-12
Напряжение питания
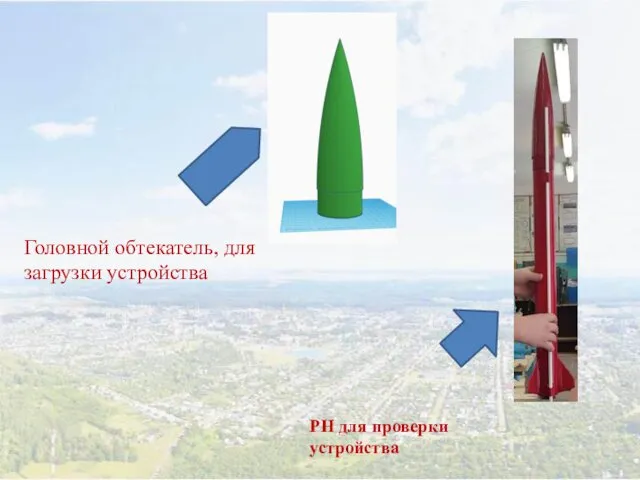
РН для проверки устройства
Головной обтекатель, для загрузки устройства
РН для проверки устройства
Головной обтекатель, для загрузки устройства
 Устройство и технические характеристики тягового двигателя ЭДП810 (СТК 810)
Устройство и технические характеристики тягового двигателя ЭДП810 (СТК 810) Спектроскопические методы
Спектроскопические методы Влажность воздуха Подготовка к ГИА
Влажность воздуха Подготовка к ГИА Турбина, первичный двигатель с вращательным движением рабочего органа
Турбина, первичный двигатель с вращательным движением рабочего органа Деление ядер урана
Деление ядер урана Неразделенные камеры сгорания
Неразделенные камеры сгорания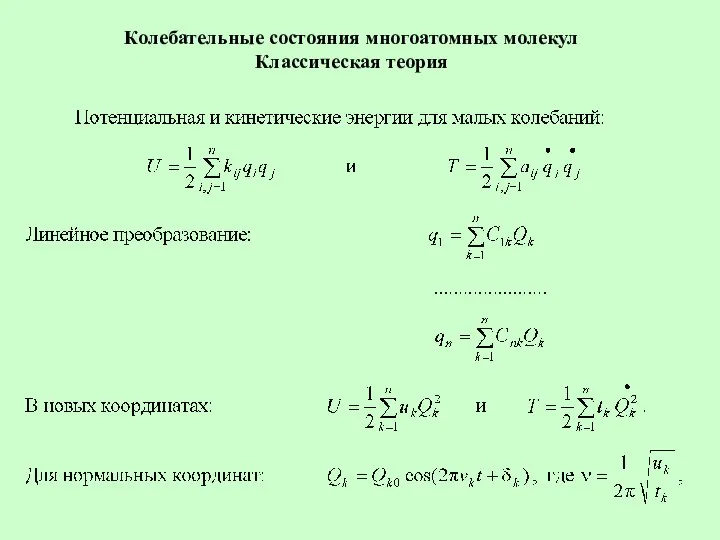 Колебательные состояния многоатомных молекул. Классическая теория
Колебательные состояния многоатомных молекул. Классическая теория Перемещение при прямолинейном равноускоренном движении
Перемещение при прямолинейном равноускоренном движении Конденсаторы Выполнил: Каретко Дима, ученик 10 «А» Руководитель: Попова Ирина Александровна, учитель физики Белово 2011
Конденсаторы Выполнил: Каретко Дима, ученик 10 «А» Руководитель: Попова Ирина Александровна, учитель физики Белово 2011 Приложение к вопросу 02: вывод формулы Резерфорда
Приложение к вопросу 02: вывод формулы Резерфорда Электронные лампы. Триоды и диоды
Электронные лампы. Триоды и диоды Элементы специальной теории относительности (СТО). Релятивистская кинематика
Элементы специальной теории относительности (СТО). Релятивистская кинематика Статика. Основные понятия и определения
Статика. Основные понятия и определения Процесс намагничивания ферромагнетиков. Основные магнитные свойства ферромагнетиков. Природа коэрцитивной силы
Процесс намагничивания ферромагнетиков. Основные магнитные свойства ферромагнетиков. Природа коэрцитивной силы Влажность, влагоемкость, водо- нефте- газонасыщенность
Влажность, влагоемкость, водо- нефте- газонасыщенность Моделі та їх типи. Моделювання.
Моделі та їх типи. Моделювання.  Динамика материальной точки
Динамика материальной точки Предисловие и учебники
Предисловие и учебники Может ли вода течь вверх
Может ли вода течь вверх Презентация по физике "полупроводники" - скачать бесплатно
Презентация по физике "полупроводники" - скачать бесплатно Относительность механического движения и покоя(I). Тест 4
Относительность механического движения и покоя(I). Тест 4 Электричество и магнетизм. Лекция 12
Электричество и магнетизм. Лекция 12 Лекция 3. Физические основы радиолокации и характеристики РЛС
Лекция 3. Физические основы радиолокации и характеристики РЛС Cудноплавство та повітроплавання
Cудноплавство та повітроплавання Масс-спектрометрия
Масс-спектрометрия Введение. Машины и их классификация
Введение. Машины и их классификация Транзисторы
Транзисторы Тест по теме: линии магнитного полня, однородное, неоднородное поле, правило правой руки
Тест по теме: линии магнитного полня, однородное, неоднородное поле, правило правой руки