- Тензор деформаций. Тензор скоростей деформации

Содержание
- 2. Тензор скоростей деформации Напряжённое состояние среды связано и определяется деформационными изменениями. Так, например, под воздействием одной
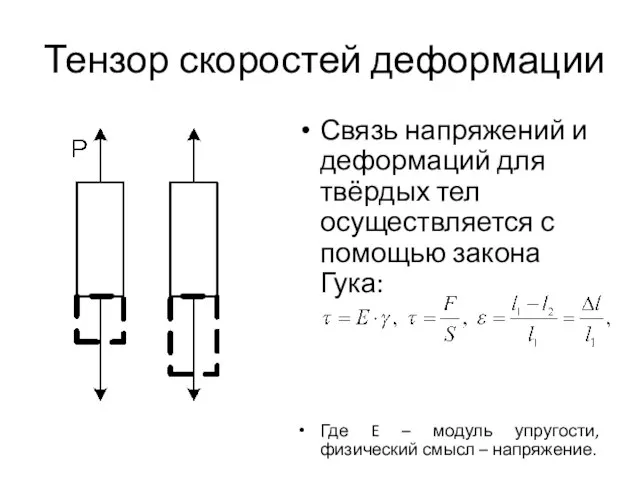
- 3. Тензор скоростей деформации Связь напряжений и деформаций для твёрдых тел осуществляется с помощью закона Гука: Где
- 4. Тензор скоростей деформации Тензор напряжений (или напряжённое состояние точки среды) зависит от скорости течения среды. Кинематическое
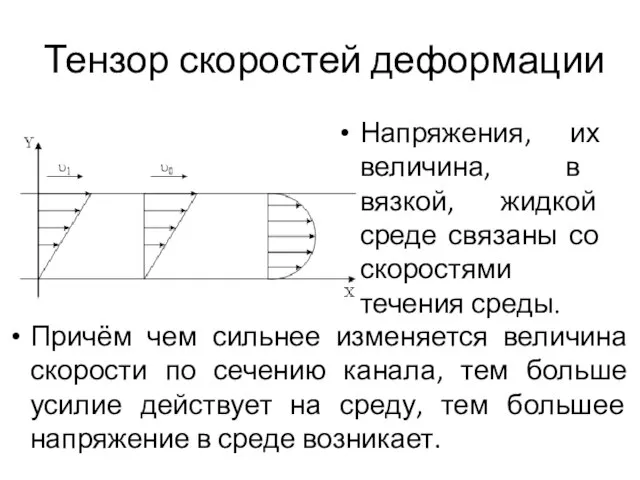
- 5. Тензор скоростей деформации Напряжения, их величина, в вязкой, жидкой среде связаны со скоростями течения среды. Причём
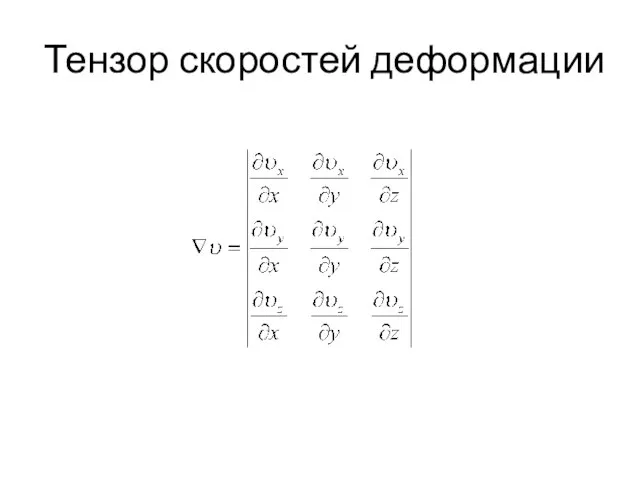
- 6. Тензор скоростей деформации В общем случае течения, возможно, более чем одно ненулевое направление градиента скорости. Каждый
- 7. Тензор скоростей деформации
- 8. Тензор скоростей деформации Движение жидкости представляет собой одновременное перемещение и вращение. Такие движения можно разделить, представить
- 9. Тензор скоростей деформации Тензор скоростей деформаций вводится следующим образом: где тензор - транспонированный тензор, имеющий те
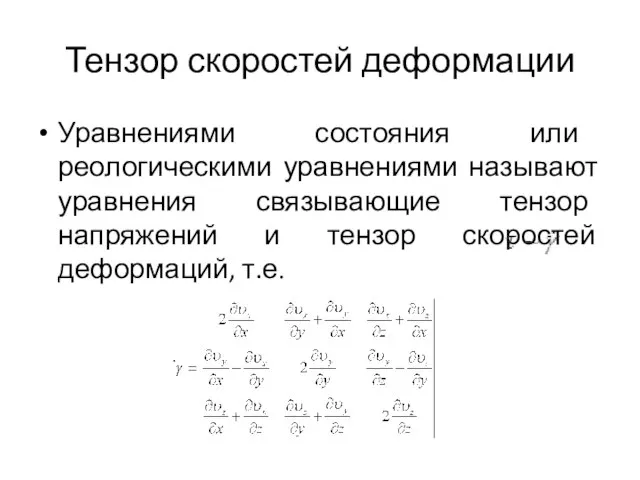
- 10. Тензор скоростей деформации Уравнениями состояния или реологическими уравнениями называют уравнения связывающие тензор напряжений и тензор скоростей
- 11. Тензор деформации Напряжения приложенные к среде (возникающие в среде) приводят к возникновению различного рода деформаций. Течению
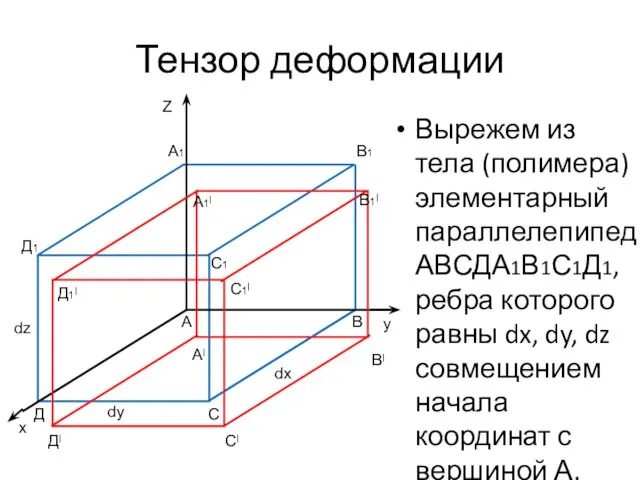
- 12. Тензор деформации Вырежем из тела (полимера) элементарный параллелепипед АВСДА1В1С1Д1, ребра которого равны dx, dy, dz совмещением
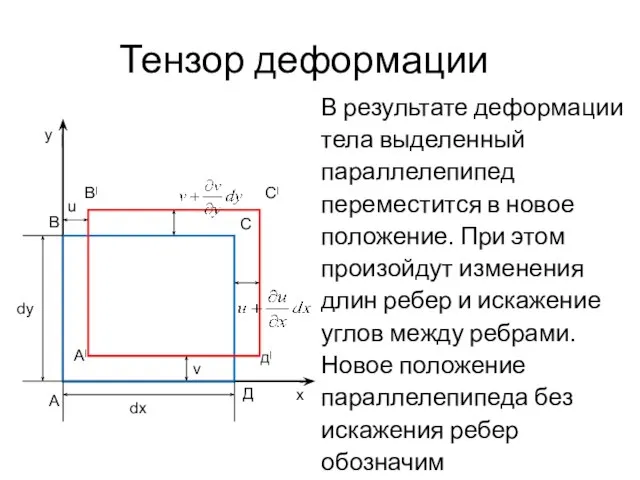
- 13. Тензор деформации В результате деформации тела выделенный параллелепипед переместится в новое положение. При этом произойдут изменения
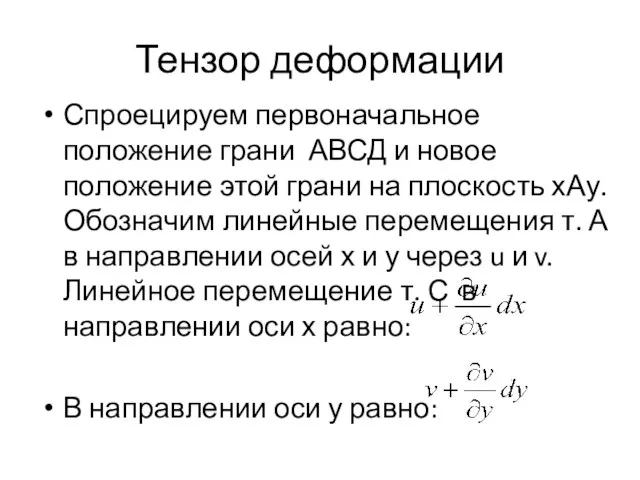
- 14. Тензор деформации Спроецируем первоначальное положение грани АВСД и новое положение этой грани на плоскость хАу. Обозначим
- 15. Тензор деформации При этом ребро АД, которое до деформации имело длину dx получит приращение равное ,
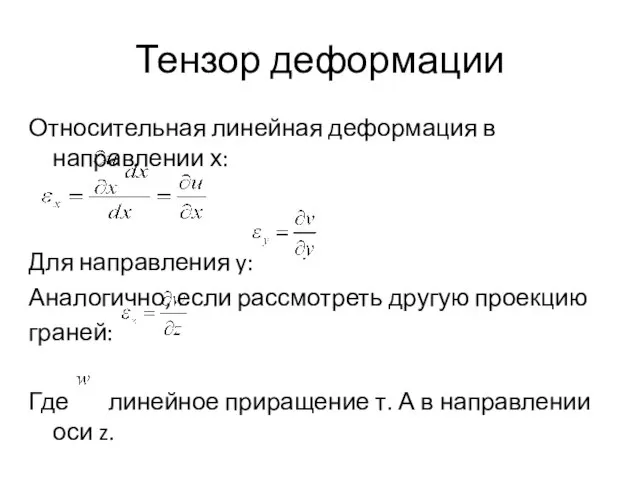
- 16. Тензор деформации Относительная линейная деформация в направлении х: Для направления y: Аналогично, если рассмотреть другую проекцию
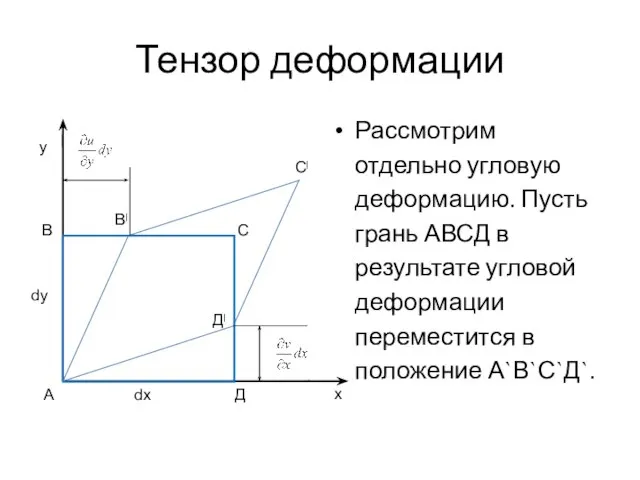
- 17. Тензор деформации Рассмотрим отдельно угловую деформацию. Пусть грань АВСД в результате угловой деформации переместится в положение
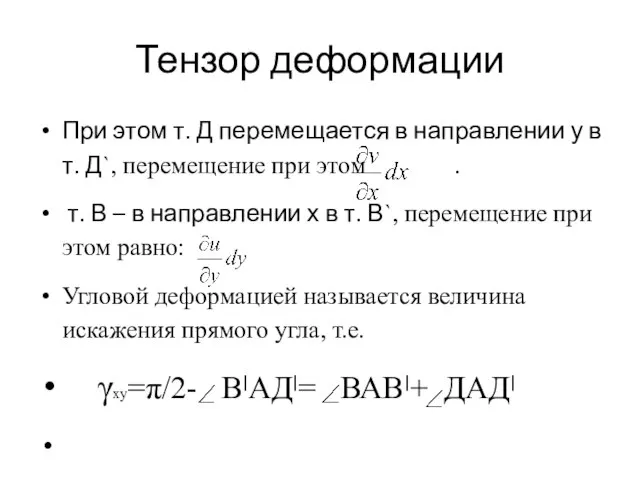
- 18. Тензор деформации При этом т. Д перемещается в направлении у в т. Д`, перемещение при этом
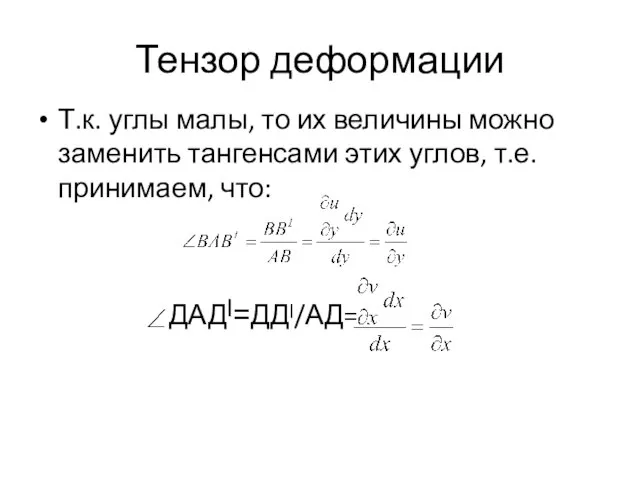
- 19. Тензор деформации Т.к. углы малы, то их величины можно заменить тангенсами этих углов, т.е. принимаем, что:
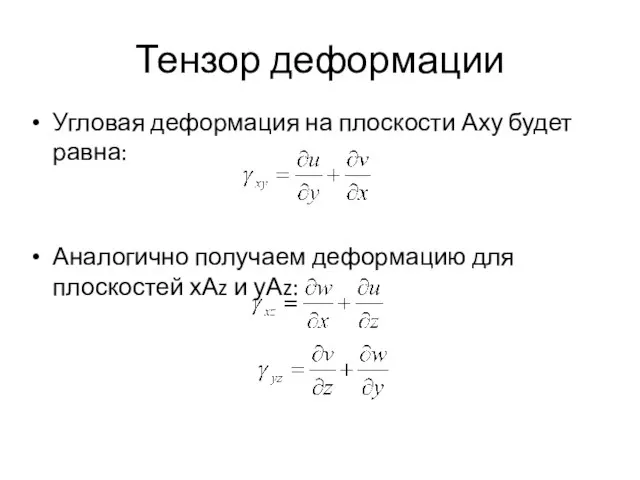
- 20. Тензор деформации Угловая деформация на плоскости Аху будет равна: Аналогично получаем деформацию для плоскостей хАz и
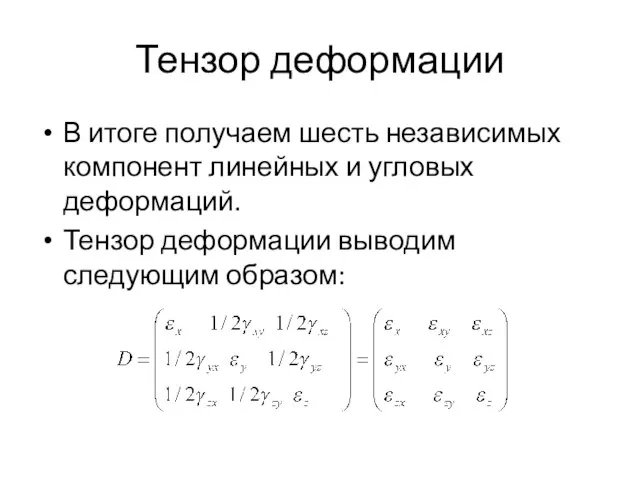
- 21. Тензор деформации В итоге получаем шесть независимых компонент линейных и угловых деформаций. Тензор деформации выводим следующим
- 22. Тензор деформации Тензор симметричен, т.е. В случае упругой деформации существуют следующие зависимости тензоров напряжений и деформаций.
- 23. Простой сдвиг Деформация происходит под действием тангенциальной силы. Происходит изменение формы, но не объема. α
- 24. Всестороннее сжатие Если каждая сторона куба подвергается действию нормального напряжения, то сжимающим напряжением является давление.
- 25. Всестороннее сжатие Происходит изменение объема при сохранении формы. Где К – модуль всестороннего сжатия, - объемная
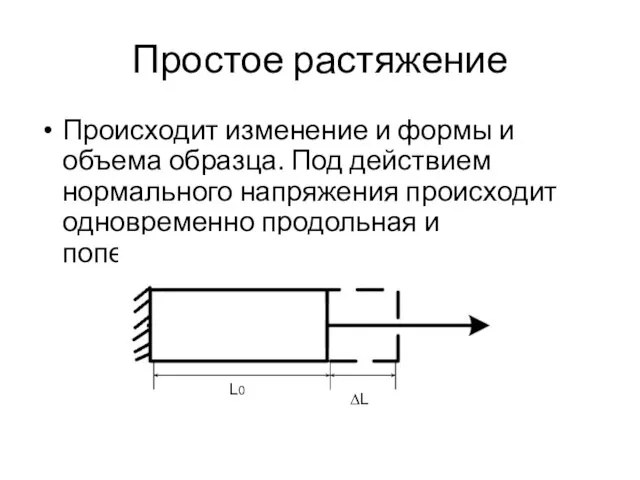
- 26. Простое растяжение Происходит изменение и формы и объема образца. Под действием нормального напряжения происходит одновременно продольная
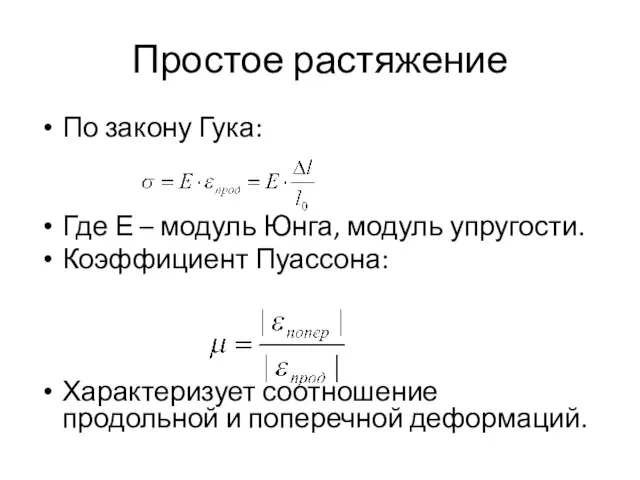
- 27. Простое растяжение По закону Гука: Где Е – модуль Юнга, модуль упругости. Коэффициент Пуассона: Характеризует соотношение
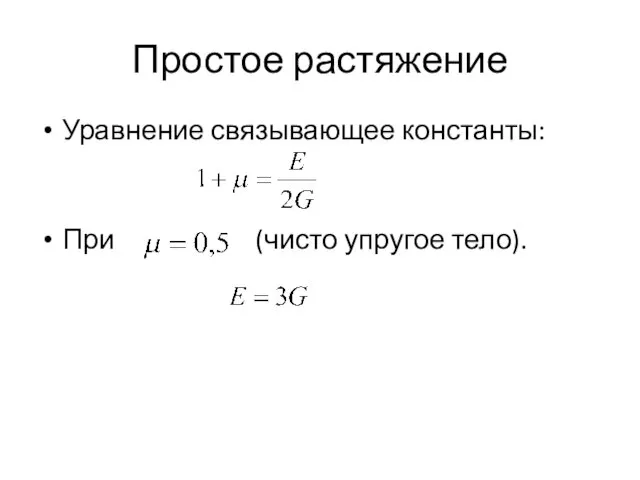
- 28. Простое растяжение Уравнение связывающее константы: При (чисто упругое тело).
- 29. Тензор деформации Если деформация строго пропорциональна напряжению, то модуль Е есть коэффициент пропорциональности и имеет для
- 31. Скачать презентацию
Тензор скоростей деформации
Напряжённое состояние среды связано и определяется деформационными изменениями. Так,
Тензор скоростей деформации
Напряжённое состояние среды связано и определяется деформационными изменениями. Так,
Тензор скоростей деформации
Связь напряжений и деформаций для твёрдых тел осуществляется с
Тензор скоростей деформации
Связь напряжений и деформаций для твёрдых тел осуществляется с
Тензор скоростей деформации
Тензор напряжений (или напряжённое состояние точки среды) зависит от
Тензор скоростей деформации
Тензор напряжений (или напряжённое состояние точки среды) зависит от
Тензор скоростей деформации
Напряжения, их величина, в вязкой, жидкой среде связаны со
Тензор скоростей деформации
Напряжения, их величина, в вязкой, жидкой среде связаны со
Тензор скоростей деформации
В общем случае течения, возможно, более чем одно ненулевое
Тензор скоростей деформации
В общем случае течения, возможно, более чем одно ненулевое
Тензор скоростей деформации
Тензор скоростей деформации
Тензор скоростей деформации
Движение жидкости представляет собой одновременное перемещение и вращение. Такие
Тензор скоростей деформации
Движение жидкости представляет собой одновременное перемещение и вращение. Такие
Тензор скоростей деформации
Тензор скоростей деформаций вводится следующим образом:
где тензор - транспонированный
Тензор скоростей деформации
Тензор скоростей деформаций вводится следующим образом:
где тензор - транспонированный
Тензор скоростей деформации
Уравнениями состояния или реологическими уравнениями называют уравнения связывающие тензор
Тензор скоростей деформации
Уравнениями состояния или реологическими уравнениями называют уравнения связывающие тензор
Тензор деформации
Напряжения приложенные к среде (возникающие в среде) приводят к возникновению
Тензор деформации
Напряжения приложенные к среде (возникающие в среде) приводят к возникновению
Тензор деформации
Вырежем из тела (полимера) элементарный параллелепипед АВСДА1В1С1Д1, ребра которого равны
Тензор деформации
Вырежем из тела (полимера) элементарный параллелепипед АВСДА1В1С1Д1, ребра которого равны
Тензор деформации
В результате деформации тела выделенный параллелепипед переместится в новое положение.
Тензор деформации
В результате деформации тела выделенный параллелепипед переместится в новое положение.
Тензор деформации
Спроецируем первоначальное положение грани АВСД и новое положение этой грани
Тензор деформации
Спроецируем первоначальное положение грани АВСД и новое положение этой грани
Тензор деформации
При этом ребро АД, которое до деформации имело длину dx
Тензор деформации
При этом ребро АД, которое до деформации имело длину dx
Тензор деформации
Относительная линейная деформация в направлении х:
Для направления y:
Аналогично, если рассмотреть
Тензор деформации
Относительная линейная деформация в направлении х:
Для направления y:
Аналогично, если рассмотреть
Тензор деформации
Рассмотрим отдельно угловую деформацию. Пусть грань АВСД в результате угловой
Тензор деформации
Рассмотрим отдельно угловую деформацию. Пусть грань АВСД в результате угловой
Тензор деформации
При этом т. Д перемещается в направлении у в т.
Тензор деформации
При этом т. Д перемещается в направлении у в т.
Тензор деформации
Т.к. углы малы, то их величины можно заменить тангенсами этих
Тензор деформации
Т.к. углы малы, то их величины можно заменить тангенсами этих
Тензор деформации
Угловая деформация на плоскости Аху будет равна:
Аналогично получаем деформацию для
Тензор деформации
Угловая деформация на плоскости Аху будет равна:
Аналогично получаем деформацию для
Тензор деформации
В итоге получаем шесть независимых компонент линейных и угловых деформаций.
Тензор
Тензор деформации
В итоге получаем шесть независимых компонент линейных и угловых деформаций.
Тензор
Тензор деформации
Тензор симметричен, т.е.
В случае упругой деформации существуют следующие зависимости тензоров
Тензор деформации
Тензор симметричен, т.е.
В случае упругой деформации существуют следующие зависимости тензоров
Простой сдвиг
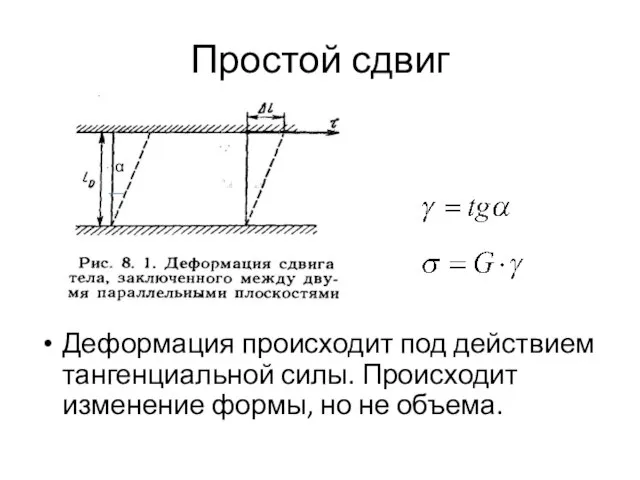
Деформация происходит под действием тангенциальной силы. Происходит изменение формы, но
Простой сдвиг
Деформация происходит под действием тангенциальной силы. Происходит изменение формы, но
Всестороннее сжатие
Если каждая сторона куба подвергается действию нормального напряжения, то сжимающим
Всестороннее сжатие
Если каждая сторона куба подвергается действию нормального напряжения, то сжимающим
Всестороннее сжатие
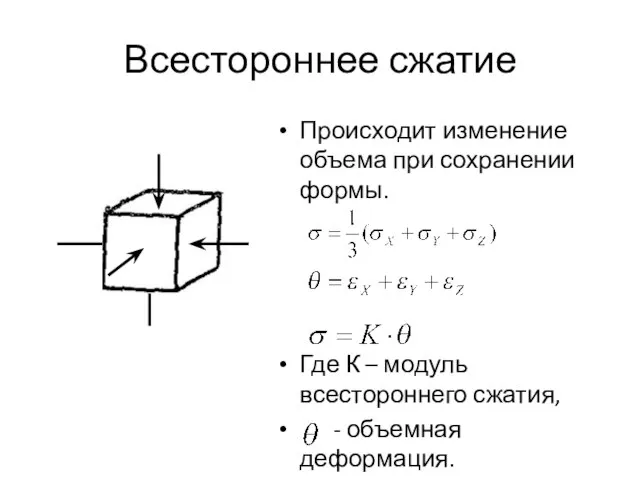
Происходит изменение объема при сохранении формы.
Где К – модуль всестороннего
Всестороннее сжатие
Происходит изменение объема при сохранении формы.
Где К – модуль всестороннего
Простое растяжение
Происходит изменение и формы и объема образца. Под действием нормального
Простое растяжение
Происходит изменение и формы и объема образца. Под действием нормального
Простое растяжение
По закону Гука:
Где Е – модуль Юнга, модуль упругости.
Коэффициент Пуассона:
Характеризует
Простое растяжение
По закону Гука:
Где Е – модуль Юнга, модуль упругости.
Коэффициент Пуассона:
Характеризует
Простое растяжение
Уравнение связывающее константы:
При (чисто упругое тело).
Простое растяжение
Уравнение связывающее константы:
При (чисто упругое тело).
Тензор деформации
Если деформация строго пропорциональна напряжению, то модуль Е есть коэффициент
Тензор деформации
Если деформация строго пропорциональна напряжению, то модуль Е есть коэффициент
 Строительная физика
Строительная физика Расчёт теплообменника с вращающимися элементами
Расчёт теплообменника с вращающимися элементами Электромагнитная совместимость в сетях подвижной радиосвязи
Электромагнитная совместимость в сетях подвижной радиосвязи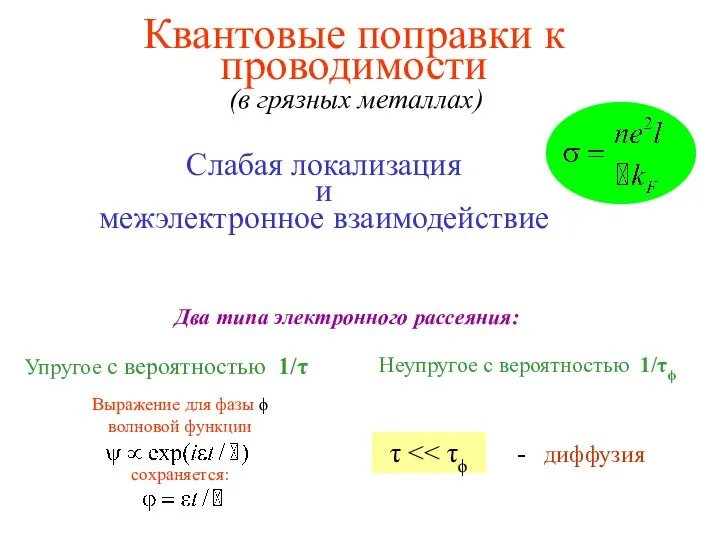 Квантовые поправки к проводимости. Слабая локализация и межэлектронное взаимодействие
Квантовые поправки к проводимости. Слабая локализация и межэлектронное взаимодействие Кинематика. Задачи
Кинематика. Задачи Термомеханический эффект
Термомеханический эффект Внутренняя энергия. Температура
Внутренняя энергия. Температура Майкл Фарадей
Майкл Фарадей Коротаева И. А. МОУ СОШкола №98
Коротаева И. А. МОУ СОШкола №98 Свободные и вынужденные электромагнитные колебания. Колебательный контур. Превращение энергии при электромагнитных колебаниях
Свободные и вынужденные электромагнитные колебания. Колебательный контур. Превращение энергии при электромагнитных колебаниях Система уравнений Максвелла. Основные уравнения электродинамики
Система уравнений Максвелла. Основные уравнения электродинамики Двойной электрон-ядерный резонанс. Введение в теорию кристаллического поля
Двойной электрон-ядерный резонанс. Введение в теорию кристаллического поля Кипение жидкости
Кипение жидкости Основы взаимозаменяемости
Основы взаимозаменяемости Действующие значения. Закон Ома для цепи переменного тока
Действующие значения. Закон Ома для цепи переменного тока Фотометрия. Клинический спектрофотометр
Фотометрия. Клинический спектрофотометр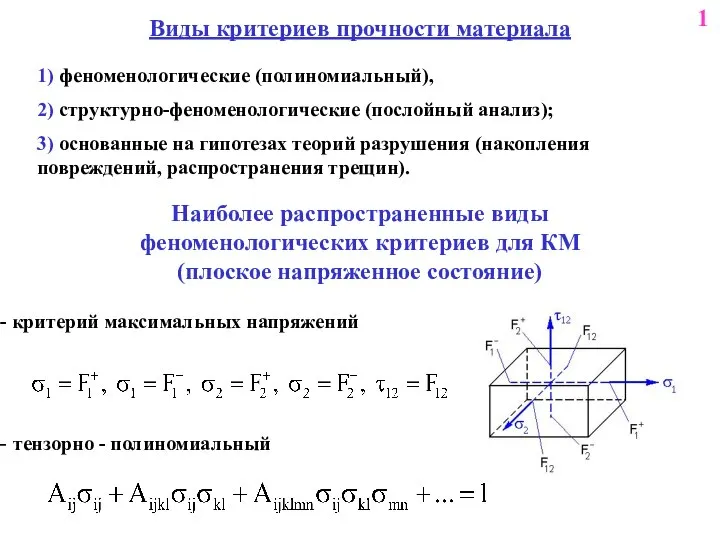 Виды критериев прочности материала
Виды критериев прочности материала Термическое расширение твердых тел в жизни и технике
Термическое расширение твердых тел в жизни и технике Сұйық біртексіз жүйелерді бөлу
Сұйық біртексіз жүйелерді бөлу Виртуальный практикум. Гамма спектрометрия
Виртуальный практикум. Гамма спектрометрия Идеальный газ в закрытом цилиндре
Идеальный газ в закрытом цилиндре Электричество и магнетизм Закон Кулона. Напряженность. Электрический диполь. Потенциал.
Электричество и магнетизм Закон Кулона. Напряженность. Электрический диполь. Потенциал.  Тест по теме «Звук. Отражение звука»
Тест по теме «Звук. Отражение звука» Электроразведка. Электромагнитные зондирования
Электроразведка. Электромагнитные зондирования Коллоквиум 2
Коллоквиум 2 Динамика. Введение в динамику. Основные понятия и определения
Динамика. Введение в динамику. Основные понятия и определения Бензиновые двигатели с непосредственным впрыском АВ120
Бензиновые двигатели с непосредственным впрыском АВ120 Реологические свойства биологических объектов. Гемодинамика
Реологические свойства биологических объектов. Гемодинамика