- Введение. Механика. Элементы кинематики. (лекция № 1)

Содержание
- 2. 143 ВОПРОСЫ Введение. 1. Механическое движение. Система отсчёта. Средняя и мгновенная скорости. 2. Ускорение. Уравнение кинематики
- 3. 143 Введение
- 4. 143 Физика это наука изучающая простейшие и вместе с тем наиболее общие закономерности явлений природы, свойства
- 5. 143 В методах физических исследований выделяют четыре этапа: 1) Опыт – наблюдение исследуемого явления в точно
- 6. 143 Для объяснения данных привлекаются гипотезы. 2) Гипотеза – это научное предположение, выдвигаемое для объяснения какого-либо
- 7. 143 Для проверки гипотезы ставят эксперимент. 3) Эксперимент – создание явления, которое естественно в природе не
- 8. 143 Если гипотеза прошла успешную проверку, она превращается в теорию или закон. 4) Физическая теория представляет
- 9. 143 Основные этапы развития физики: 1) Атомарное строение, законы статики – античность и средние века; 2)
- 10. 143 Проблемы физики: 1) элементарные частицы (кварки и глюоны); 2) астрофизика (чёрные дыры, квазары и т.д.);
- 11. 143 Роль физики в развитии техники: 1) Развитие термодинамики дало промышленности тепловые машины; 2) Электродинамика –
- 12. 143 Физика и моделирование. Физика служит для описания явлений, для предсказания результата явлений, т.е. можно сказать,
- 13. 143 Даже простейший процесс, такой как прямолинейное равномерное движение, описывается с помощь математической модели: S =
- 14. 143 Другой пример: задача о движении двух тел: с помощью формул движения и взаимодействия мы можем
- 15. 143 Иногда математические формулы получаются настолько сложные, что их аналитически решить не возможно (например, задача о
- 16. 143 Также, с усложнением экспериментов компьютеру отводится задача управления, сбора и обработки данных.
- 17. 143
- 18. 143 Вопрос № 1. Механическое движение. Система отсчёта. Материальная точка. Траектория. Перемещение и путь. Средняя и
- 19. 143 Кинематика изучает законы движения тел. Материальная точка – модель тела, размерами которого можно пренебречь, по
- 20. 143 Система отсчёта – тело отсчёта, система координат, часы. Декартова система отсчёта в Евклидовом пространстве (пространство,
- 21. 143
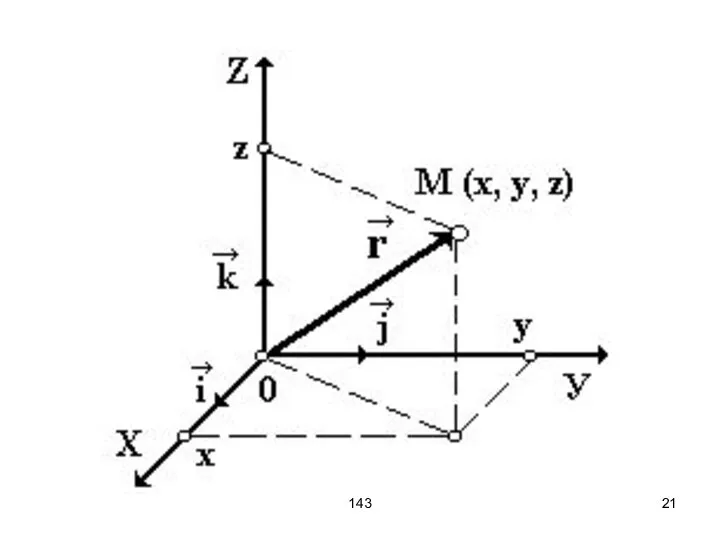
- 22. 143 Здесь i, j, k, – единичные ортогональные вектора, направленные вдоль осей x, y, z, соответственно.
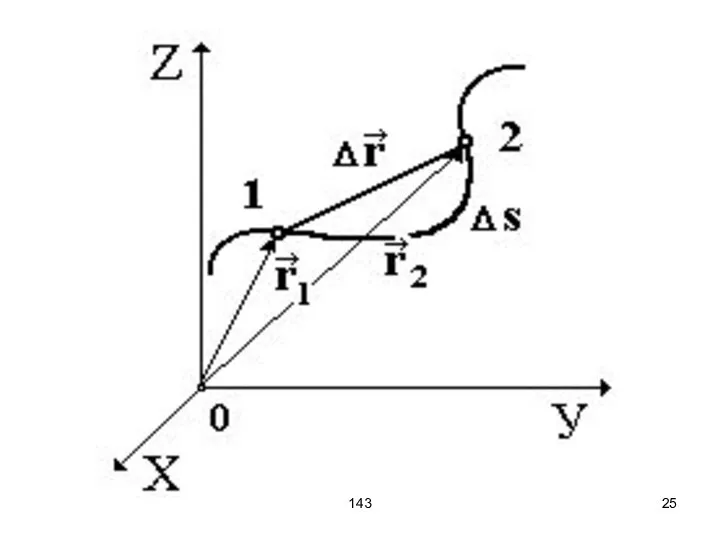
- 23. 143 Траектория – линия, вдоль которой движется тело. Путь – расстояние, которое проходит тело по траектории.
- 24. 143 Так как тело может менять положение, то положение задают в зависимости от времени: векторно r
- 25. 143
- 26. 143 Изменение положения с течением промежутка времени Δt характеризуют скоростью. Средняя скорость (по пути и по
- 27. 143 Мгновенная скорость (по пути и по перемещению, соответственно) точка над символом обозначает производную по времени.
- 28. 143 Здесь dS, dr, dt – дифференциал, очень малое изменение величины – приращение (ещё может быть
- 29. 143
- 30. 143 Вопрос № 2. Ускорение. Тангенциальное и нормальное ускорения. Уравнение кинематики поступательного равнопеременного движения (вывод).
- 31. 143 Изменение скорости характеризуют ускорением. Среднее ускорение
- 32. 143 Мгновенное ускорение (по пути и по перемещению, соответственно)
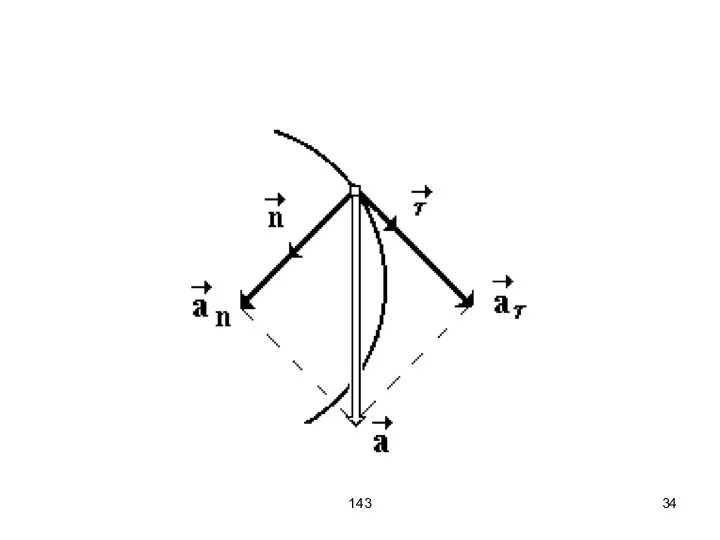
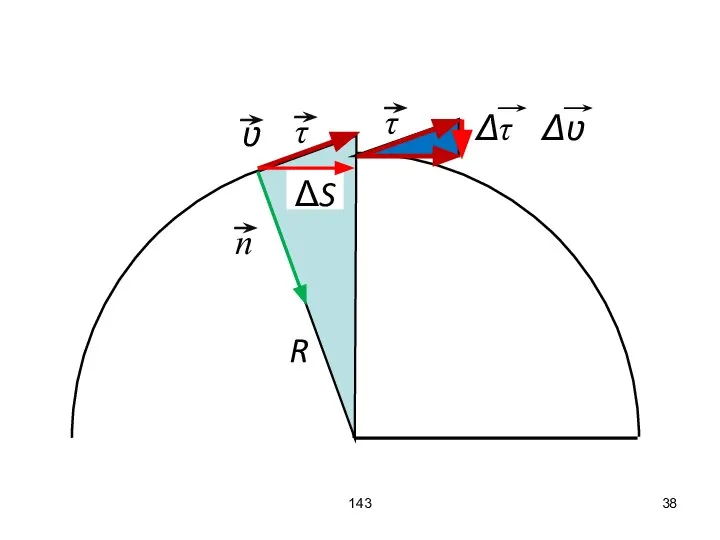
- 33. 143 Выделим на траектории бесконечно малый участок dS, который можно заменить дугой окружности с радиусом R.
- 34. 143
- 35. 143 Скорость представим в виде тогда ускорение можно записать следующим образом
- 36. 143 Нормальное ускорение, направлено по нормали к траектории, изменяет направление движения Тангенциальное ускорение, направлено по касательной
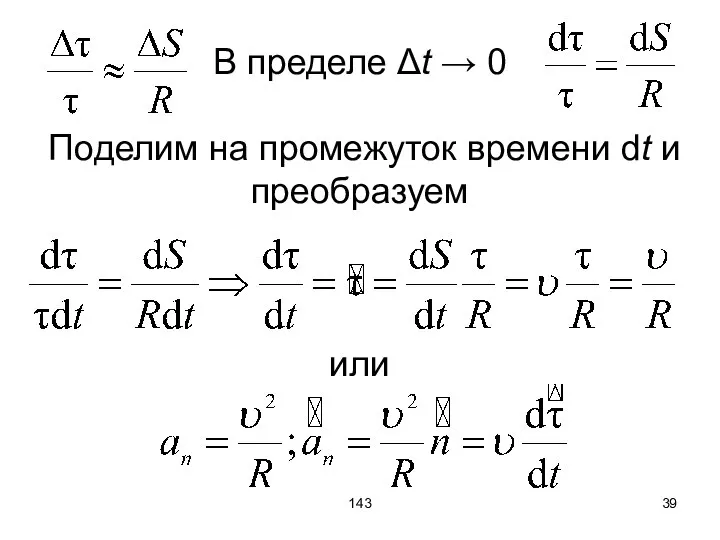
- 37. 143 Рассмотрим на рисунке два подобных треугольника, с катетами R, ΔS и τ, Δτ (или ʋ,
- 38. 143 R ΔS
- 39. 143 В пределе Δt → 0 Поделим на промежуток времени dt и преобразуем или
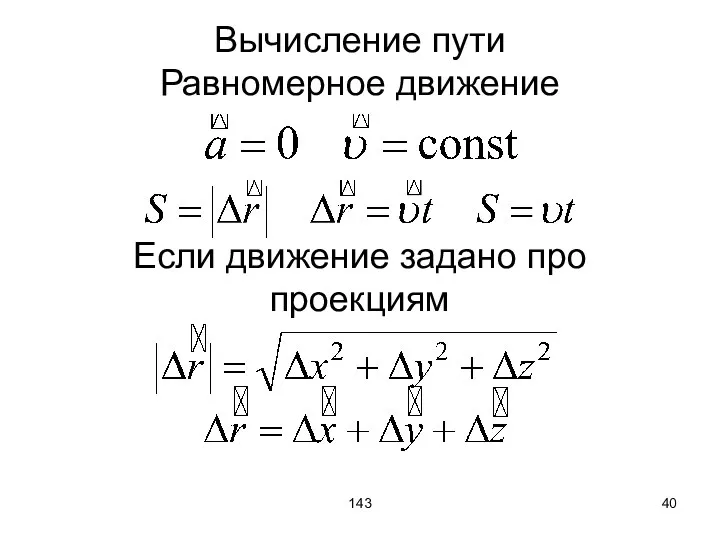
- 40. 143 Вычисление пути Равномерное движение Если движение задано про проекциям
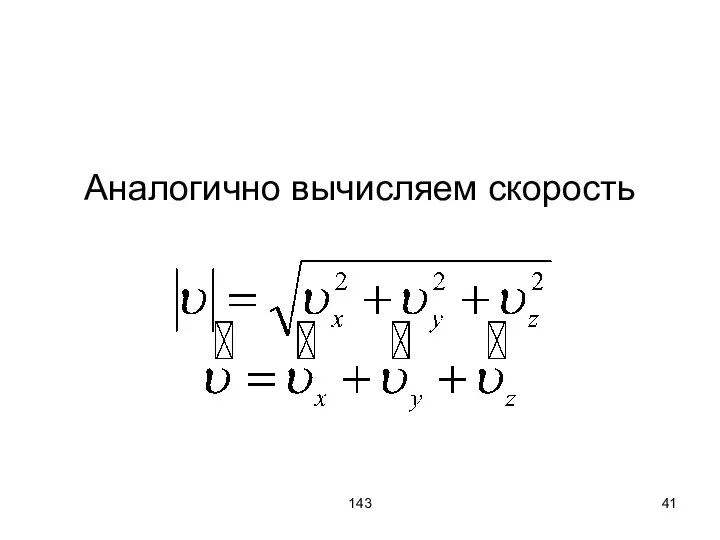
- 41. 143 Аналогично вычисляем скорость
- 42. 143 Равноускоренное движение Весь путь разбивают на множество участков, на которых скорость можно считать постоянной (за
- 43. 143 Полный путь или перемещение получаем сложением этих малых участков Чем меньше промежутки времени, тем точнее
- 44. 143 Переходим к пределу
- 45. 143 Положим начальный момент времени равным нулю и добавим начальное положение r0 или S0 Это закон
- 46. 143 Вычислить ускорение можно следующими способами (аналогично скорости и перемещению)
- 47. 143
- 48. 143 Вопрос № 3. Движение материальной точки по окружности. Угловая скорость и угловое ускорение. Уравнения кинематики
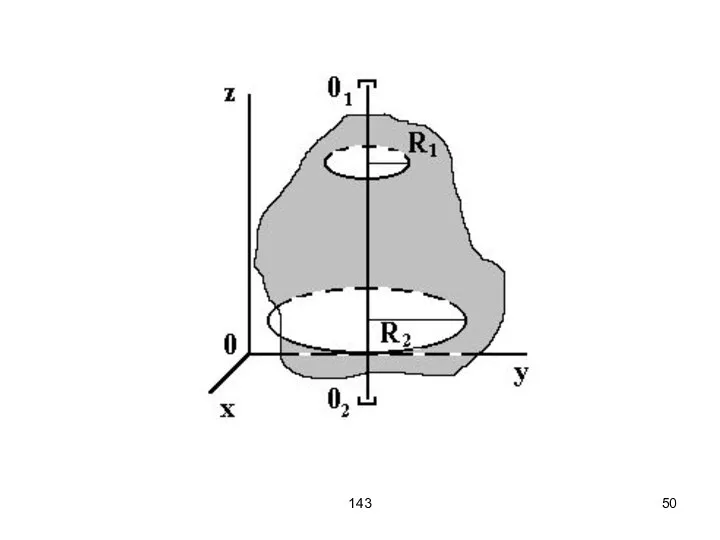
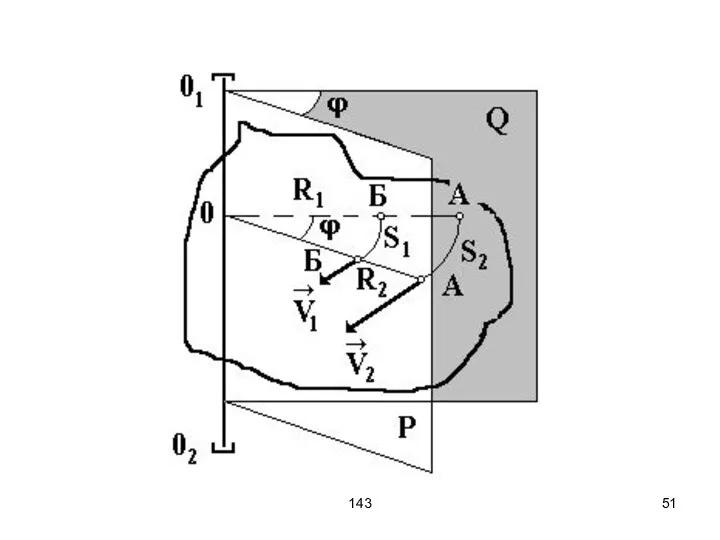
- 49. 143 Вращательное движение Вращательным движением абсолютно твердого тела называют движение, при котором все его точки описывают
- 50. 143
- 51. 143
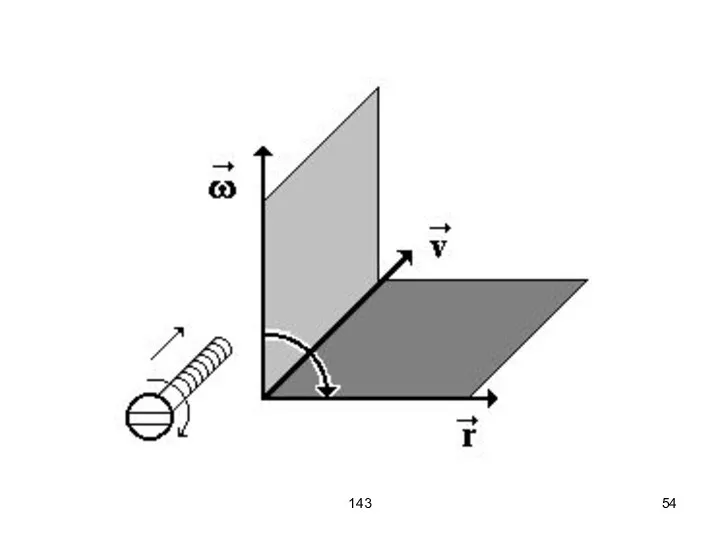
- 52. 143 Вращательное движение характеризуется углом поворота φ, угловой скорость вращения ω, угловым ускорением ε
- 53. 143 Вектор ω направляют вдоль оси вращения согласно правилу правого буравчика
- 54. 143
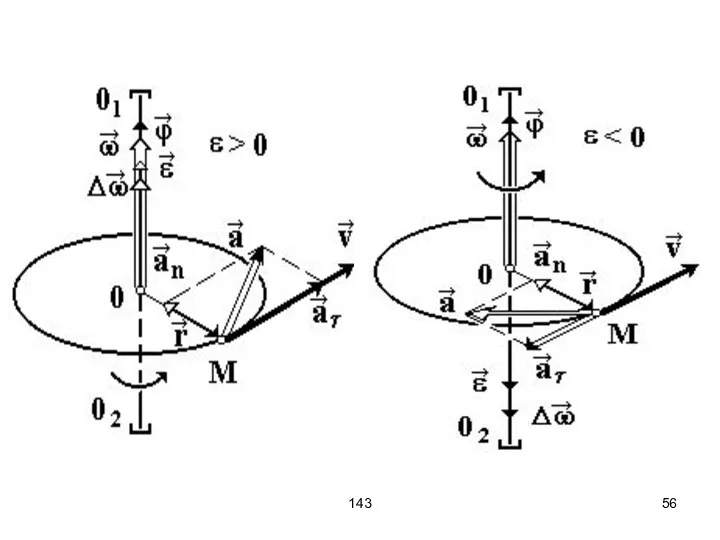
- 55. 143 Вектора ω и ε направлены одинаково, если вращение ускоренное, вектора ω и ε направлены в
- 56. 143
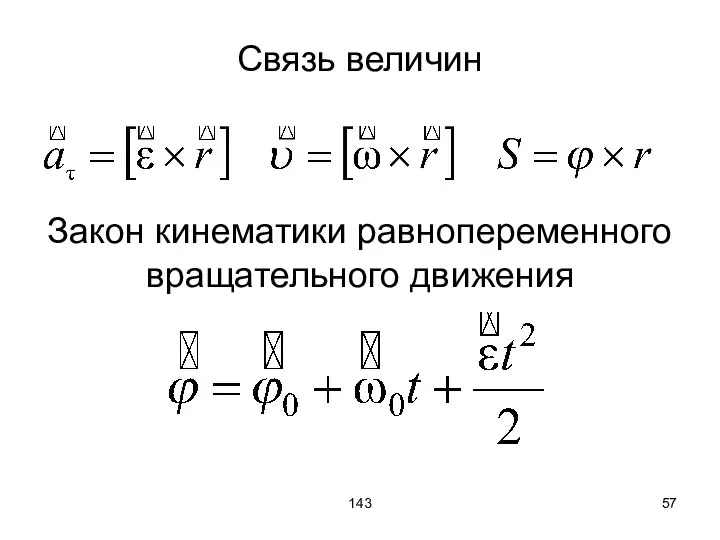
- 57. 143 Связь величин Закон кинематики равнопеременного вращательного движения
- 58. 143 Так же, для описания вращательного движения используют частоту (количество оборотов за 1 секунду) и период
- 59. 143 Циклическая частота она же угловая скорость вращения – количество оборотов за 2π секунды
- 60. 143 Поступательное движение – это такое движение, при котором любая прямая, связанная с движущимся телом, остаётся
- 61. 143
- 62. 143 ЛЕКЦИЯ № 2 Динамика
- 63. 143 ВОПРОСЫ 4. Динамика. Масса, инертность, сила. Первый закон Ньютона. 5. Второй закон Ньютона. Третий закон
- 64. 143 Вопрос № 4. Динамика. Границы применимости классического способа описания движения частиц. Масса, инертность, сила. Фундаментальные
- 65. 143 Динамика изучает движение тел в связи с теми причинами, которые обуславливают тот или иной характер
- 66. 143 Состояние частиц Абсолютно свободных тел нет. Состояние частицы (и, как следствие, описание её движения) зависит
- 67. 143 Законы Ньютоновой механики выполняются если (границы применимости): 1) Пространство Евклидово (т.е. описывается аксиомами евклидовой геометрии,
- 68. 143 4) Закон всемирного тяготения выполняется для всей известной для нас вселенной; 5) Изменение всех полей
- 69. 143 Основные понятия Масса – физическая величина, мера инертности. Инертность – свойство тел сопротивляться при попытке
- 70. 143 В природе существуют четыре фундаментальные силы (все взаимодействия в природе сводятся к этим четырём силам):
- 71. 143 3) Сильное или ядерное взаимодействие (связь частиц в атомном ядре); 4) Слабое взаимодействие (процессы распада
- 72. 143 1-й закон Ньютона (закон инерции): Всякое тело находится в состоянии покоя или равномерного и прямолинейного
- 73. 143 Инерциальные системы отсчёта – системы отсчёта, в которых тела движутся без ускорения если на них
- 74. 143
- 75. 143 Вопрос № 5. Второй закон Ньютона как уравнение движения. Третий закон Ньютона. Закон сохранения импульса
- 76. 143 Законы Ньютона получены в результате обобщения большого количества опытных фактов. Например, в результате взаимодействия (независимо
- 77. 143 Если рассматривать через импульс тела – произведение массы тела на его скорость, то получим:
- 78. 143 Скорость изменения импульса тела равна действующей на тело силе F – уравнение движения тела или
- 79. 143 3-й закон Ньютона: Силы с которыми действуют друг на друга взаимодействующие тела, равны по модулю
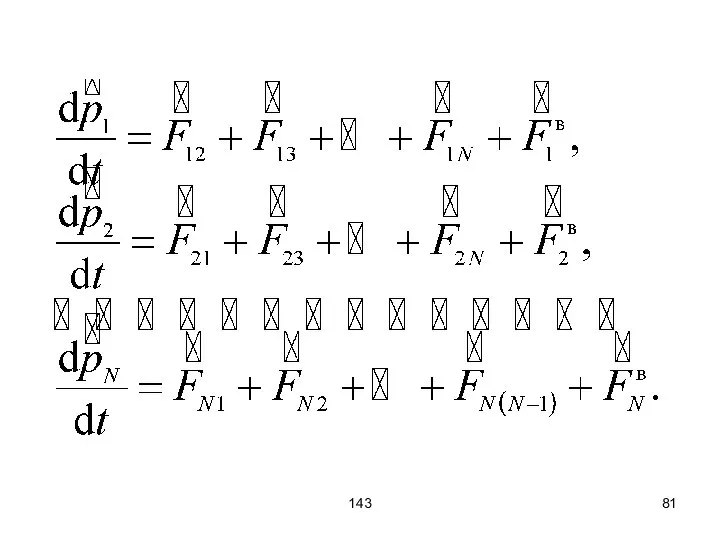
- 80. 143 Закон сохранения импульса. Рассмотрим замкнутую систему из N тел. Запишем изменение импульса и действующие силы
- 81. 143
- 82. 143 Просуммируем все эти уравнения
- 83. 143 Первая сумма справа равна нулю по 3-му закону Ньютона: . Втора сумма справа равна нулю
- 84. 143 Следовательно Закон сохранения импульса: В замкнутой изолированной системе полный импульс остаётся постоянным.
- 85. 143 Центром масс или центром инерции системы называется такая воображаемая точка, радиус-вектор R которой выражается через
- 86. 143 Продифференцируем по времени, умножим на массу всей системы (M = m1 + m2 + …):
- 87. 143 Отсюда, используя закон сохранения масс, получаем закон движения центра масс: Таким образом, центр масс изменяет
- 88. 143 Примеры: движение снаряда; как до взрыва, так и после взрыва, центр масс движется по параболе,
- 89. 143
- 90. 143 6. Реактивное движение. Движение тел с переменной массой. Уравнение Мещерского. Формула Циолковского.
- 91. 143 До сих пор рассматривали движение с постоянной массой. Рассмотрим движение с переменной массой – движение
- 92. 143 Такое движение принято называть реактивным. Но в широком смысле всякое движение есть реактивное движение, поскольку
- 93. 143 Рассмотрим движение тела с переменной массой – движение ракеты. Пусть m(t) – масса ракеты в
- 94. 143 За время dt масса и скорость получат приращения dm и dʋ (dm 0). Новый импульс
- 95. 143 Изменение импульса за время dt равно приращению Fdt – импульса силы: (m+dm)*(ʋ+dʋ)+dmгаз*ʋгаз – mʋ =
- 96. 143 Далее, изменение массы ракеты со знаком «–»: – dm = + dmгаз; Меняем скорость истечения
- 97. 143 Выполняем следующие преобразования: mdʋ = Fdt + ʋотнdm. Делим на дифференциал времени dt и получаем
- 98. 143 Запишем уравнение Мещерского – уравнение движения точки с переменной массой
- 99. 143 Здесь m – масса ракеты, ʋ – скорость ракеты, ʋотн – скорость истечения газов относительно
- 100. 143 Рассмотрим движение ракеты в случае невесомости (Fв = 0). Начальная скорость ракеты равна нулю, направление
- 101. 143 Решение уравнения Мещерского с этими начальными условиями даёт решение – формулу Циолковского
- 102. 143 Константу C определяем из начальных условий: ʋ = 0 – начальная скорость; m0 – начальная
- 103. 143 Таким образом, получаем формулу Циолковского:
- 104. 143
- 105. 143 ЛЕКЦИЯ № 3 Законы сохранения
- 106. 143 ВОПРОСЫ 7. Динамика вращательного движения. Момент импульса частицы. Момент силы. Плечо силы. Уравнение моментов. Закон
- 107. 143 8. Кинетическая энергия. Работа постоянной и переменной силы. 9. Потенциальная энергия. Условие потенциальности. 10. Закон
- 108. 143 Вопрос № 7. Динамика вращательного движения. Момент импульса частицы. Момент силы. Плечо силы. Уравнение моментов.
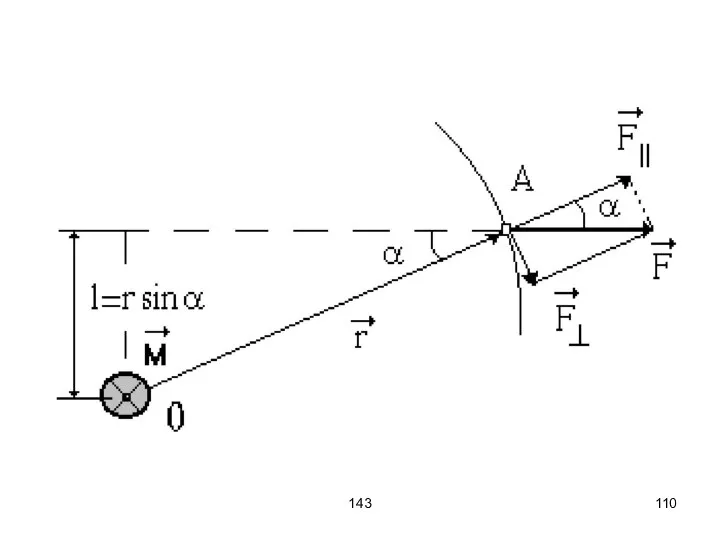
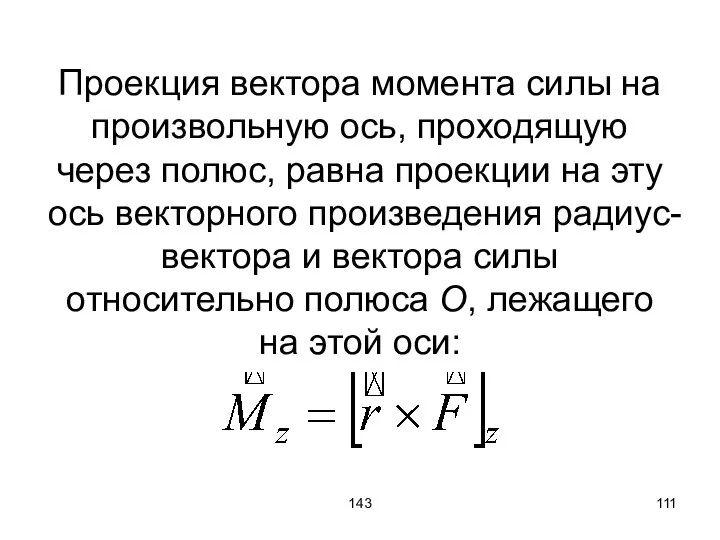
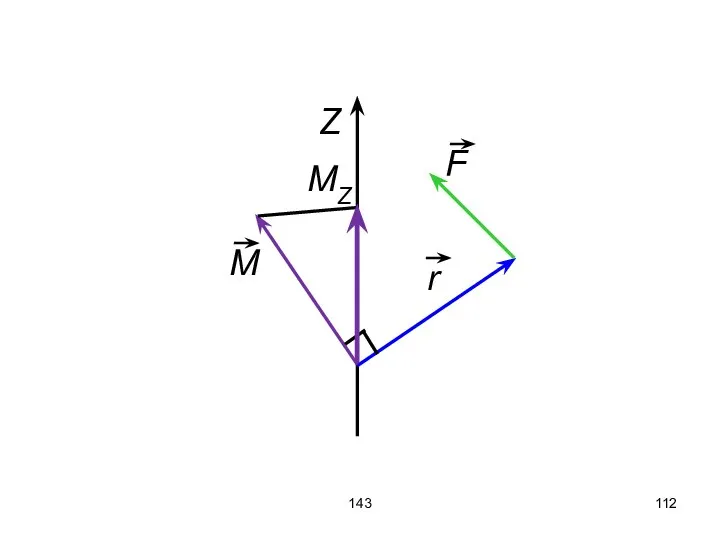
- 109. 143 Вектором момента силы относительно полюса (точки О) называют векторное произведение радиус-вектора и вектора силы Величина
- 110. 143
- 111. 143 Проекция вектора момента силы на произвольную ось, проходящую через полюс, равна проекции на эту ось
- 112. 143
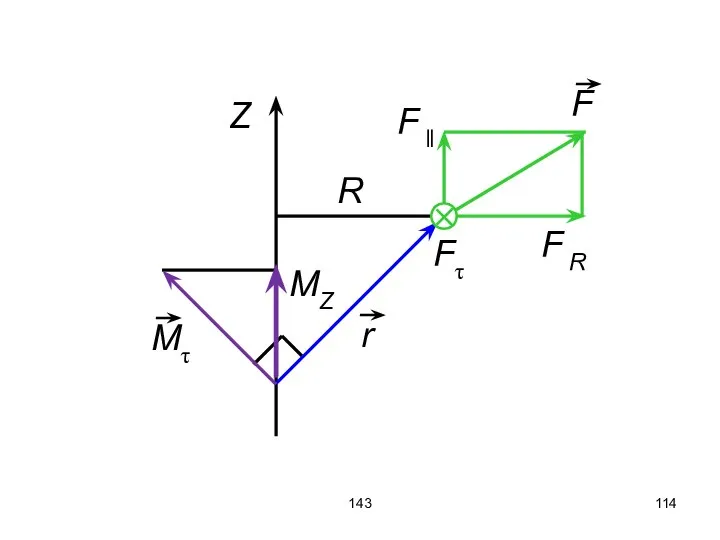
- 113. 143 Рассмотрим вопрос следующим способом. Разложим вектор силы F на три составляющие: Fτ, F‖, FR. Fτ
- 114. MZ R Fτ F R F ‖ 143 Z
- 115. 143 Поскольку F‖, FR лежат в плоскости рисунка, то M‖, MR | плоскости рисунка, следовательно, (M‖)z,
- 116. 143 Если на точку действует несколько сил, то можно говорить о равнодействующей силе – векторной сумме
- 117. 143 Вектор момента результирующей силы относительно полюса О равен геометрической сумме векторов моментов составляющих сил относительно
- 118. 143 Вектором момента импульса материальной точки относительно полюса О называют векторное произведение радиус-вектора и вектора импульса
- 119. 143 Проекция момента импульса твердого тела на произвольную ось, проходящую через полюс О, равна проекции на
- 120. 143 Запишем момент импульса и продифференцируем его
- 121. 143 Получили новое выражение, которое называется уравнением моментов или основное уравнение динамики вращательного движения
- 122. 143 Из основного уравнения динамики вращательного движения Можно получить закон сохранения момента импульса (аналогично закону сохранения
- 123. 143 Пространство однородно, следовательно, параллельный перенос системы из одного места в другое не изменяет свойств системы
- 124. 143 Пространство изотропно, следовательно, поворот замкнутой системы как целого не отражается на её механических свойствах –
- 125. 143
- 126. 143 Вопрос № 8. Кинетическая энергия. Работа постоянной и переменной силы. Мощность. 1-я и 2-я космические
- 127. 143 Запишем уравнение движения частицы и домножим на перемещение (dS = v dt):
- 128. 143 Если система замкнута, то Fвнеш = 0 T – кинетическая энергия
- 129. 143 Если на частицу действует постоянная сила F, кинетическая энергия не остаётся постоянной. В этом случае
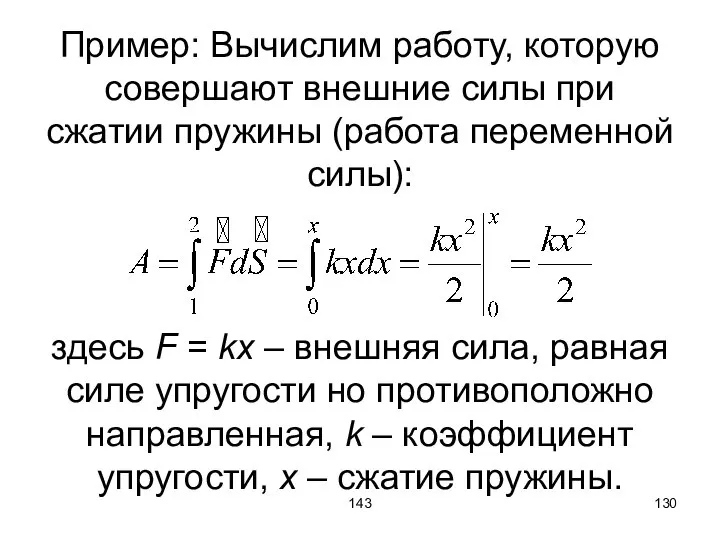
- 130. 143 Пример: Вычислим работу, которую совершают внешние силы при сжатии пружины (работа переменной силы): здесь F
- 131. 143 Мощность – работа совершаемая в единицу времени
- 132. 143 Запишем закон всемирного тяготения и потенциальную энергию гравитационного взаимодействия здесь G = 6,6720*10-11 Н*м2/кг2 гравитационная
- 133. 143 1-я космическая скорость – скорость, с которой тело движется над поверхностью земли не падая Скорость
- 134. 143 Если тело получит достаточное количество энергии (кинетической), то эта энергия будет потрачена на преодоление потенциального
- 135. 143
- 136. 143 Вопрос № 9. Консервативные силы. Потенциальная энергия. Связь силы и потенциальной энергии (условие потенциальности).
- 137. 143 Взаимодействие между телами осуществляется посредством физических полей. Каждое тело создаёт вокруг себя особое состояние, называемое
- 138. 143 Центральное поле – сила, действующая на любую точку в пространстве направлена к центру. Однородное поле:
- 139. 143 Консервативные силы: 1) Это силы, работа которых не зависит от пути, по которому тело переходит
- 140. 143 Потенциальная энергия Если работа зависит только от начального и конечного положений, то каждой точке поля
- 141. 143 Через эту функцию можно определить работу по перемещению частицы из 1-го положения во 2-е: A12
- 142. 143 Зная вид U(x, y, z) можно найти силу, действующую на частицу в каждой точке поля
- 143. 143 Если полагать, что изменений силы вдоль других осей нет или рассматривать одномерную задачу только вдоль
- 144. 143 Если учитывать все компоненты, то получим:
- 145. 143 Здесь grad – это оператор набла или градиент – вектор, направленный в сторону максимального роста
- 146. 143 Условие потенциальности Поля, которые можно описывать функцией П(x, y, z, t), называются потенциальными, градиент этой
- 147. 143 В случае стационарного поля, его силы будут консервативными П(x, y, z) = – U(x, y,
- 148. 143
- 149. 143 Вопрос № 10. Закон сохранения механической энергии изолированной системы и однородность времени. Обобщённый закон сохранения
- 150. 143 Закон сохранения энергии в механике Полная механическая энергия замкнутой изолированной системы складывается из кинетической энергии
- 151. 143 Кинетическая энергия поступательного движения Кинетическая энергия вращательного движения
- 152. 143 Потенциальная энергия деформированной пружины Потенциальная энергия гравитационного взаимодействия двух тел
- 153. 143 Если в системе есть силы приводящие к потери механической энергии (диссипативные), то полная механическая энергия
- 154. 143 В основе сохранения энергии лежит однородность времени, т.е. равнозначность всех моментов времени. Следовательно, изменение одного
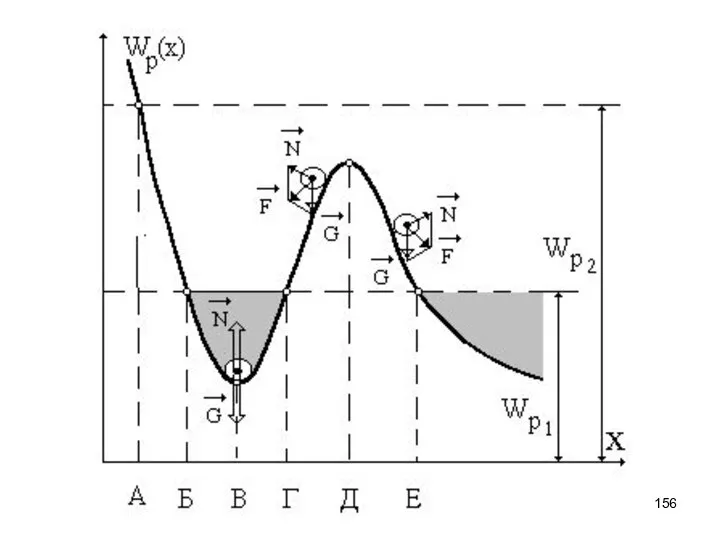
- 155. 143 Движение частицы в потенциальном поле: Если полная энергия частицы меньше значения потенциального барьера, то частица
- 156. 143
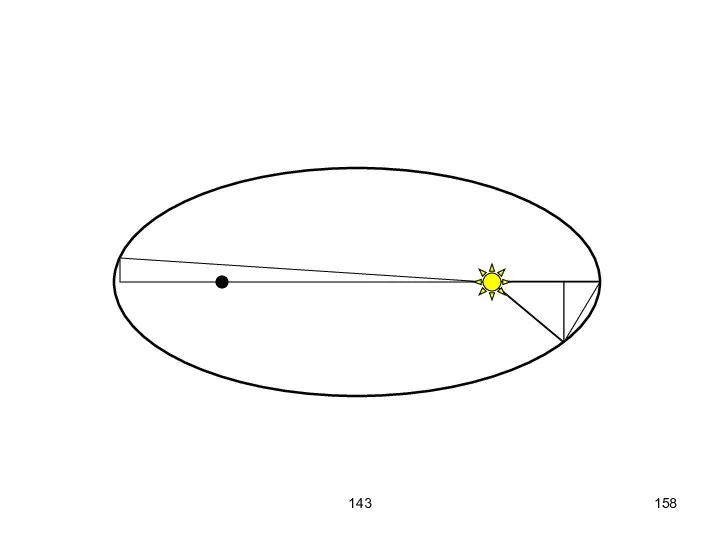
- 157. 143 Законы Кеплера 1) Каждая планета движется по эллипсу, в одном из фокусов которого расположено Солнце.
- 158. 143
- 159. 143 3) Квадраты периодов обращений планет относятся как кубы больших осей эллиптических орбит, по которым они
- 160. 143 На основе законов Кеплера Ньютон открыл закон всемирного тяготения здесь G = 6,6720*10-11 Н*м2/кг2 гравитационная
- 161. 200 Абсолютно упругий удар – удар, при котором механическая энергия тел не переходит в другие виды
- 162. 200 Закон сохранения импульса выполняется в обоих случаях. Закон сохранения энергии выполняется в случае абсолютно упругого
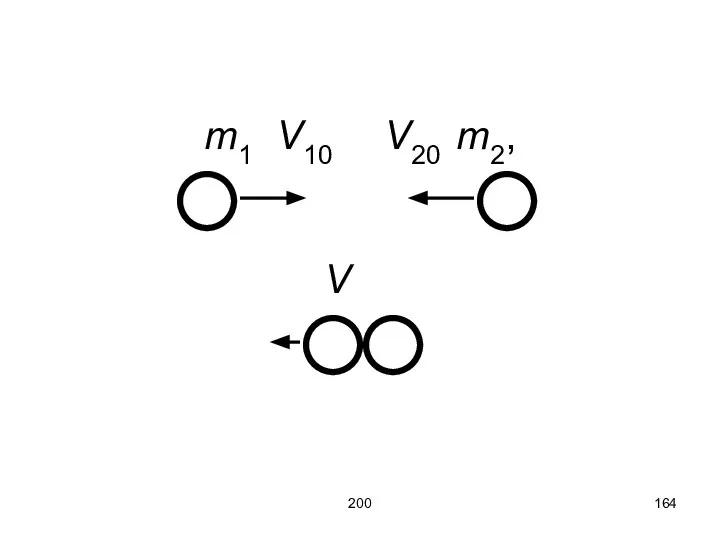
- 163. 200 Рассмотрим абсолютно неупругий удар двух шаров массами m1 и m2. Удар будем считать центральным –
- 164. 200 m1 V10 V20 m2, V
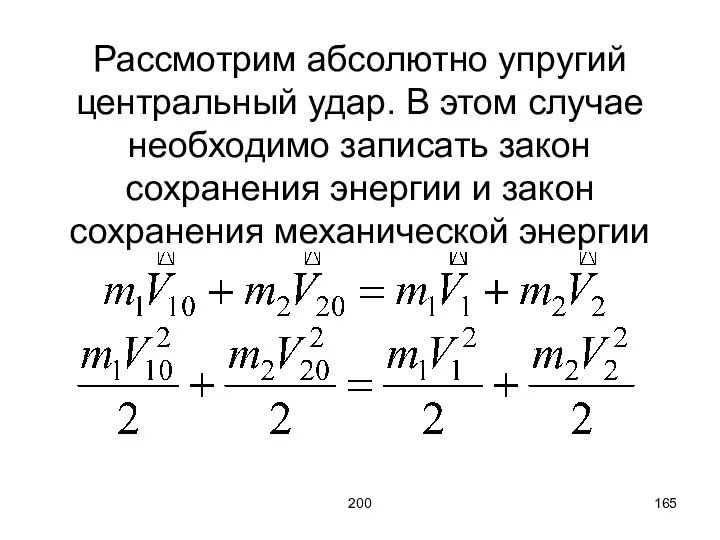
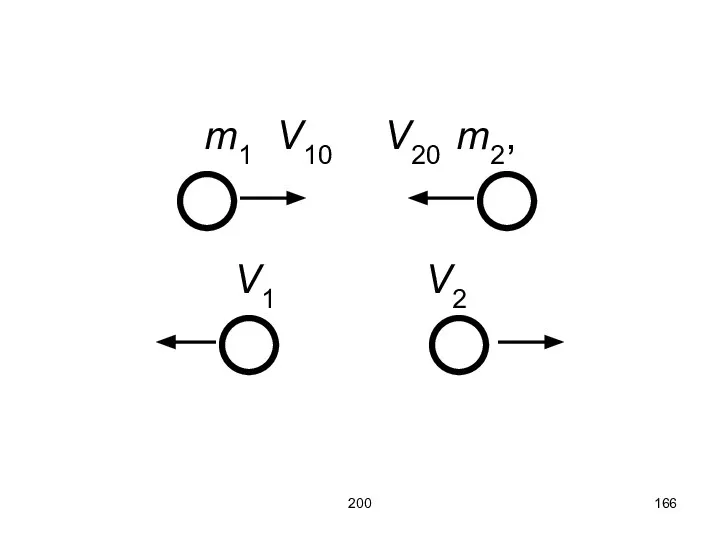
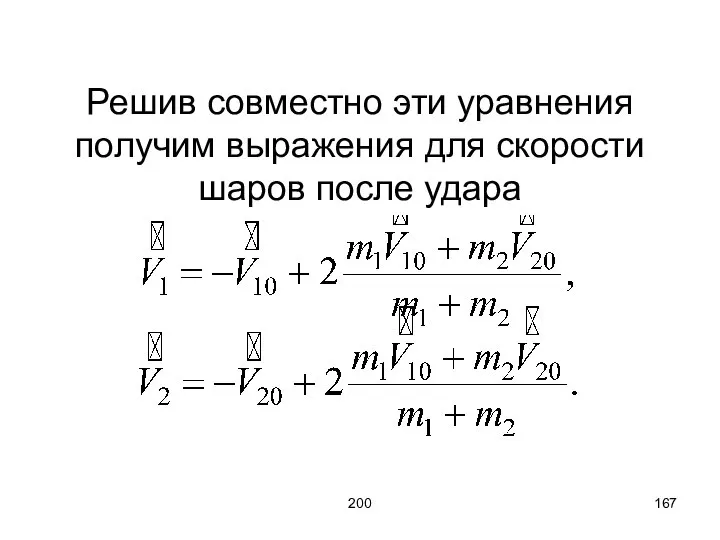
- 165. 200 Рассмотрим абсолютно упругий центральный удар. В этом случае необходимо записать закон сохранения энергии и закон
- 166. 200 m1 V10 V20 m2, V1 V2
- 167. 200 Решив совместно эти уравнения получим выражения для скорости шаров после удара
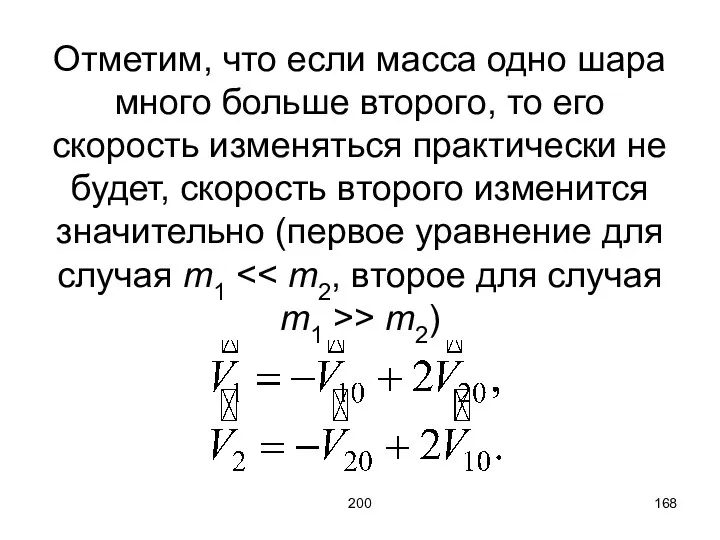
- 168. 200 Отметим, что если масса одно шара много больше второго, то его скорость изменяться практически не
- 169. 200 Если при столкновении шаров один из них покоится и их массы равны, то ударяющий после
- 170. 200 Если при столкновении шаров один из них покоится и их массы равны, а удар не
- 171. 200
- 173. Скачать презентацию
143
ВОПРОСЫ
Введение.
1. Механическое движение. Система отсчёта. Средняя и мгновенная скорости.
2.
143
ВОПРОСЫ Введение. 1. Механическое движение. Система отсчёта. Средняя и мгновенная скорости. 2.
143
Введение
143
Введение
143
Физика это наука изучающая простейшие и вместе с тем наиболее общие
143
Физика это наука изучающая простейшие и вместе с тем наиболее общие
143
В методах физических исследований выделяют четыре этапа:
1) Опыт – наблюдение исследуемого
143
В методах физических исследований выделяют четыре этапа: 1) Опыт – наблюдение исследуемого
143
Для объяснения данных привлекаются гипотезы.
2) Гипотеза – это научное предположение, выдвигаемое
143
Для объяснения данных привлекаются гипотезы. 2) Гипотеза – это научное предположение, выдвигаемое
143
Для проверки гипотезы ставят эксперимент.
3) Эксперимент – создание явления, которое естественно
143
Для проверки гипотезы ставят эксперимент. 3) Эксперимент – создание явления, которое естественно
143
Если гипотеза прошла успешную проверку, она превращается в теорию или закон.
4)
143
Если гипотеза прошла успешную проверку, она превращается в теорию или закон. 4)
143
Основные этапы развития физики:
1) Атомарное строение, законы статики – античность и
143
Основные этапы развития физики: 1) Атомарное строение, законы статики – античность и
143
Проблемы физики:
1) элементарные частицы (кварки и глюоны);
2) астрофизика (чёрные дыры, квазары
143
Проблемы физики: 1) элементарные частицы (кварки и глюоны); 2) астрофизика (чёрные дыры, квазары
143
Роль физики в развитии техники:
1) Развитие термодинамики дало промышленности тепловые машины;
2)
143
Роль физики в развитии техники: 1) Развитие термодинамики дало промышленности тепловые машины; 2)
143
Физика и моделирование.
Физика служит для описания явлений, для предсказания результата явлений,
143
Физика и моделирование. Физика служит для описания явлений, для предсказания результата явлений,
143
Даже простейший процесс, такой как прямолинейное равномерное движение, описывается с помощь
143
Даже простейший процесс, такой как прямолинейное равномерное движение, описывается с помощь
143
Другой пример: задача о движении двух тел: с помощью формул движения
143
Другой пример: задача о движении двух тел: с помощью формул движения
143
Иногда математические формулы получаются настолько сложные, что их аналитически решить не
143
Иногда математические формулы получаются настолько сложные, что их аналитически решить не
143
Также, с усложнением экспериментов компьютеру отводится задача управления, сбора и обработки
143
Также, с усложнением экспериментов компьютеру отводится задача управления, сбора и обработки
143
143
143
Вопрос № 1.
Механическое движение.
Система отсчёта.
Материальная точка.
Траектория.
Перемещение и путь.
Средняя и мгновенная скорости.
143
Вопрос № 1.
Механическое движение.
Система отсчёта.
Материальная точка.
Траектория.
Перемещение и путь.
Средняя и мгновенная скорости.
143
Кинематика изучает законы движения тел.
Материальная точка – модель тела, размерами которого
143
Кинематика изучает законы движения тел. Материальная точка – модель тела, размерами которого
143
Система отсчёта – тело отсчёта, система координат, часы.
Декартова система отсчёта в
143
Система отсчёта – тело отсчёта, система координат, часы. Декартова система отсчёта в
143
143
143
Здесь i, j, k, – единичные ортогональные вектора, направленные вдоль осей
143
Здесь i, j, k, – единичные ортогональные вектора, направленные вдоль осей
143
Траектория – линия, вдоль которой движется тело.
Путь – расстояние, которое проходит
143
Траектория – линия, вдоль которой движется тело. Путь – расстояние, которое проходит
143
Так как тело может менять положение, то положение задают в зависимости
143
Так как тело может менять положение, то положение задают в зависимости
143
143
143
Изменение положения с течением промежутка времени Δt характеризуют скоростью.
Средняя скорость (по
143
Изменение положения с течением промежутка времени Δt характеризуют скоростью. Средняя скорость (по
143
Мгновенная скорость (по пути и по перемещению, соответственно)
точка над символом обозначает
143
Мгновенная скорость (по пути и по перемещению, соответственно) точка над символом обозначает
143
Здесь dS, dr, dt – дифференциал, очень малое изменение величины –
143
Здесь dS, dr, dt – дифференциал, очень малое изменение величины –
143
143
143
Вопрос № 2.
Ускорение.
Тангенциальное и нормальное ускорения.
Уравнение кинематики поступательного равнопеременного движения (вывод).
143
Вопрос № 2.
Ускорение.
Тангенциальное и нормальное ускорения.
Уравнение кинематики поступательного равнопеременного движения (вывод).
143
Изменение скорости характеризуют ускорением.
Среднее ускорение
143
Изменение скорости характеризуют ускорением.
Среднее ускорение
143
Мгновенное ускорение (по пути и по перемещению, соответственно)
143
Мгновенное ускорение (по пути и по перемещению, соответственно)
143
Выделим на траектории бесконечно малый участок dS, который можно заменить дугой
143
Выделим на траектории бесконечно малый участок dS, который можно заменить дугой
143
143
143
Скорость представим в виде
тогда ускорение можно записать следующим образом
143
Скорость представим в виде
тогда ускорение можно записать следующим образом
143
Нормальное ускорение, направлено по нормали к траектории, изменяет направление движения
Тангенциальное ускорение,
143
Нормальное ускорение, направлено по нормали к траектории, изменяет направление движения Тангенциальное ускорение,
143
Рассмотрим на рисунке два подобных треугольника, с катетами R, ΔS и
143
Рассмотрим на рисунке два подобных треугольника, с катетами R, ΔS и
143
R
ΔS
143
R
ΔS
143
В пределе Δt → 0
Поделим на промежуток времени dt и преобразуем
или
143
В пределе Δt → 0
Поделим на промежуток времени dt и преобразуем
или
143
Вычисление пути
Равномерное движение
Если движение задано про проекциям
143
Вычисление пути
Равномерное движение
Если движение задано про проекциям
143
Аналогично вычисляем скорость
143
Аналогично вычисляем скорость
143
Равноускоренное движение
Весь путь разбивают на множество участков, на которых скорость можно
143
Равноускоренное движение Весь путь разбивают на множество участков, на которых скорость можно
143
Полный путь или перемещение получаем сложением этих малых участков
Чем меньше промежутки
143
Полный путь или перемещение получаем сложением этих малых участков Чем меньше промежутки
143
Переходим к пределу
143
Переходим к пределу
143
Положим начальный момент времени равным нулю и добавим начальное положение r0
143
Положим начальный момент времени равным нулю и добавим начальное положение r0
143
Вычислить ускорение можно следующими способами (аналогично скорости и перемещению)
143
Вычислить ускорение можно следующими способами (аналогично скорости и перемещению)
143
143
143
Вопрос № 3.
Движение материальной точки по окружности.
Угловая скорость и угловое ускорение.
Уравнения
143
Вопрос № 3. Движение материальной точки по окружности. Угловая скорость и угловое ускорение. Уравнения
143
Вращательное движение
Вращательным движением абсолютно твердого тела называют движение, при котором все
143
Вращательное движение Вращательным движением абсолютно твердого тела называют движение, при котором все
143
143
143
143
143
Вращательное движение характеризуется углом поворота φ, угловой скорость вращения ω, угловым
143
Вращательное движение характеризуется углом поворота φ, угловой скорость вращения ω, угловым
143
Вектор ω направляют вдоль оси вращения согласно правилу правого буравчика
143
Вектор ω направляют вдоль оси вращения согласно правилу правого буравчика
143
143
143
Вектора ω и ε направлены одинаково, если вращение ускоренное, вектора ω
143
Вектора ω и ε направлены одинаково, если вращение ускоренное, вектора ω
143
143
143
Связь величин
Закон кинематики равнопеременного вращательного движения
143
Связь величин
Закон кинематики равнопеременного вращательного движения
143
Так же, для описания вращательного движения используют частоту (количество оборотов за
143
Так же, для описания вращательного движения используют частоту (количество оборотов за
143
Циклическая частота она же угловая скорость вращения – количество оборотов за
143
Циклическая частота она же угловая скорость вращения – количество оборотов за
143
Поступательное движение – это такое движение, при котором любая прямая, связанная
143
Поступательное движение – это такое движение, при котором любая прямая, связанная
143
143
143
ЛЕКЦИЯ № 2
Динамика
143
ЛЕКЦИЯ № 2
Динамика
143
ВОПРОСЫ
4. Динамика. Масса, инертность, сила. Первый закон Ньютона.
5. Второй закон Ньютона.
143
ВОПРОСЫ 4. Динамика. Масса, инертность, сила. Первый закон Ньютона. 5. Второй закон Ньютона.
143
Вопрос № 4.
Динамика.
Границы применимости классического способа описания движения частиц.
Масса, инертность, сила.
143
Вопрос № 4. Динамика. Границы применимости классического способа описания движения частиц. Масса, инертность, сила.
143
Динамика изучает движение тел в связи с теми причинами, которые обуславливают
143
Динамика изучает движение тел в связи с теми причинами, которые обуславливают
143
Состояние частиц
Абсолютно свободных тел нет. Состояние частицы (и, как следствие, описание
143
Состояние частиц Абсолютно свободных тел нет. Состояние частицы (и, как следствие, описание
143
Законы Ньютоновой механики выполняются если (границы применимости):
1) Пространство Евклидово (т.е. описывается
143
Законы Ньютоновой механики выполняются если (границы применимости): 1) Пространство Евклидово (т.е. описывается
143
4) Закон всемирного тяготения выполняется для всей известной для нас вселенной;
5)
143
4) Закон всемирного тяготения выполняется для всей известной для нас вселенной; 5)
143
Основные понятия
Масса – физическая величина, мера инертности.
Инертность – свойство тел сопротивляться
143
Основные понятия Масса – физическая величина, мера инертности. Инертность – свойство тел сопротивляться
143
В природе существуют четыре фундаментальные силы (все взаимодействия в природе сводятся
143
В природе существуют четыре фундаментальные силы (все взаимодействия в природе сводятся
143
3) Сильное или ядерное взаимодействие (связь частиц в атомном ядре);
4) Слабое
143
3) Сильное или ядерное взаимодействие (связь частиц в атомном ядре); 4) Слабое
143
1-й закон Ньютона (закон инерции):
Всякое тело находится в состоянии покоя или
143
1-й закон Ньютона (закон инерции): Всякое тело находится в состоянии покоя или
143
Инерциальные системы отсчёта – системы отсчёта, в которых тела движутся без
143
Инерциальные системы отсчёта – системы отсчёта, в которых тела движутся без
143
143
143
Вопрос № 5.
Второй закон Ньютона как уравнение движения.
Третий закон Ньютона.
Закон сохранения
143
Вопрос № 5. Второй закон Ньютона как уравнение движения. Третий закон Ньютона. Закон сохранения
143
Законы Ньютона получены в результате обобщения большого количества опытных фактов. Например,
143
Законы Ньютона получены в результате обобщения большого количества опытных фактов. Например,
143
Если рассматривать через импульс тела – произведение массы тела на его
143
Если рассматривать через импульс тела – произведение массы тела на его
143
Скорость изменения импульса тела равна действующей на тело силе F –
143
Скорость изменения импульса тела равна действующей на тело силе F –
143
3-й закон Ньютона: Силы с которыми действуют друг на друга взаимодействующие
143
3-й закон Ньютона: Силы с которыми действуют друг на друга взаимодействующие
143
Закон сохранения импульса.
Рассмотрим замкнутую систему из N тел. Запишем изменение импульса
143
Закон сохранения импульса. Рассмотрим замкнутую систему из N тел. Запишем изменение импульса
143
143
143
Просуммируем все эти уравнения
143
Просуммируем все эти уравнения
143
Первая сумма справа равна нулю по 3-му закону Ньютона: .
Втора сумма
143
Первая сумма справа равна нулю по 3-му закону Ньютона: . Втора сумма
143
Следовательно
Закон сохранения импульса:
В замкнутой изолированной системе полный импульс остаётся постоянным.
143
Следовательно
Закон сохранения импульса:
В замкнутой изолированной системе полный импульс остаётся постоянным.
143
Центром масс или центром инерции системы называется такая воображаемая точка, радиус-вектор
143
Центром масс или центром инерции системы называется такая воображаемая точка, радиус-вектор
143
Продифференцируем по времени, умножим на массу всей системы
(M = m1 +
143
Продифференцируем по времени, умножим на массу всей системы (M = m1 +
143
Отсюда, используя закон сохранения масс, получаем закон движения центра масс:
Таким образом,
143
Отсюда, используя закон сохранения масс, получаем закон движения центра масс: Таким образом,
143
Примеры: движение снаряда; как до взрыва, так и после взрыва, центр
143
Примеры: движение снаряда; как до взрыва, так и после взрыва, центр
143
143
143
6. Реактивное движение. Движение тел с переменной массой. Уравнение Мещерского. Формула
143
6. Реактивное движение. Движение тел с переменной массой. Уравнение Мещерского. Формула
143
До сих пор рассматривали движение с постоянной массой. Рассмотрим движение с
143
До сих пор рассматривали движение с постоянной массой. Рассмотрим движение с
143
Такое движение принято называть реактивным. Но в широком смысле всякое движение
143
Такое движение принято называть реактивным. Но в широком смысле всякое движение
143
Рассмотрим движение тела с переменной массой – движение ракеты.
Пусть m(t) –
143
Рассмотрим движение тела с переменной массой – движение ракеты. Пусть m(t) –
143
За время dt масса и скорость получат приращения dm и dʋ
(dm
143
За время dt масса и скорость получат приращения dm и dʋ (dm
143
Изменение импульса за время dt равно приращению Fdt – импульса силы:
(m+dm)*(ʋ+dʋ)+dmгаз*ʋгаз
143
Изменение импульса за время dt равно приращению Fdt – импульса силы: (m+dm)*(ʋ+dʋ)+dmгаз*ʋгаз
143
Далее, изменение массы ракеты
со знаком «–»:
– dm = + dmгаз;
Меняем
143
Далее, изменение массы ракеты со знаком «–»: – dm = + dmгаз; Меняем
143
Выполняем следующие преобразования:
mdʋ = Fdt + ʋотнdm.
Делим на дифференциал времени
143
Выполняем следующие преобразования: mdʋ = Fdt + ʋотнdm. Делим на дифференциал времени
143
Запишем уравнение Мещерского – уравнение движения точки с переменной массой
143
Запишем уравнение Мещерского – уравнение движения точки с переменной массой
143
Здесь m – масса ракеты, ʋ – скорость ракеты, ʋотн –
143
Здесь m – масса ракеты, ʋ – скорость ракеты, ʋотн –
143
Рассмотрим движение ракеты в случае невесомости (Fв = 0). Начальная скорость
143
Рассмотрим движение ракеты в случае невесомости (Fв = 0). Начальная скорость
143
Решение уравнения Мещерского с этими начальными условиями даёт решение – формулу
143
Решение уравнения Мещерского с этими начальными условиями даёт решение – формулу
143
Константу C определяем из начальных условий:
ʋ = 0 – начальная скорость;
m0
143
Константу C определяем из начальных условий: ʋ = 0 – начальная скорость; m0
143
Таким образом, получаем формулу Циолковского:
143
Таким образом, получаем формулу Циолковского:
143
143
143
ЛЕКЦИЯ № 3
Законы сохранения
143
ЛЕКЦИЯ № 3
Законы сохранения
143
ВОПРОСЫ
7. Динамика вращательного движения.
Момент импульса частицы.
Момент силы. Плечо силы.
Уравнение моментов.
Закон сохранения
143
ВОПРОСЫ 7. Динамика вращательного движения. Момент импульса частицы. Момент силы. Плечо силы. Уравнение моментов. Закон сохранения

143
8. Кинетическая энергия. Работа постоянной и переменной силы.
9. Потенциальная энергия. Условие
143
8. Кинетическая энергия. Работа постоянной и переменной силы. 9. Потенциальная энергия. Условие
143
Вопрос № 7.
Динамика вращательного движения.
Момент импульса частицы.
Момент силы. Плечо силы.
Уравнение
143
Вопрос № 7. Динамика вращательного движения. Момент импульса частицы. Момент силы. Плечо силы. Уравнение
143
Вектором момента силы относительно полюса (точки О) называют векторное произведение радиус-вектора
143
Вектором момента силы относительно полюса (точки О) называют векторное произведение радиус-вектора
143
143
143
Проекция вектора момента силы на произвольную ось, проходящую через полюс, равна
143
Проекция вектора момента силы на произвольную ось, проходящую через полюс, равна
143
143
143
Рассмотрим вопрос следующим способом.
Разложим вектор силы F на три составляющие: Fτ,
143
Рассмотрим вопрос следующим способом. Разложим вектор силы F на три составляющие: Fτ,
MZ
R
Fτ
F R
F ‖
143
Z
MZ
R
Fτ
F R
F ‖
143
Z
143
Поскольку F‖, FR лежат в плоскости рисунка,
то M‖, MR | плоскости
143
Поскольку F‖, FR лежат в плоскости рисунка, то M‖, MR | плоскости
143
Если на точку действует несколько сил, то можно говорить о равнодействующей
143
Если на точку действует несколько сил, то можно говорить о равнодействующей
143
Вектор момента результирующей силы относительно полюса О равен геометрической сумме векторов
143
Вектор момента результирующей силы относительно полюса О равен геометрической сумме векторов
143
Вектором момента импульса материальной точки относительно полюса О называют векторное произведение
143
Вектором момента импульса материальной точки относительно полюса О называют векторное произведение
143
Проекция момента импульса твердого тела на произвольную ось, проходящую через полюс
143
Проекция момента импульса твердого тела на произвольную ось, проходящую через полюс
143
Запишем момент импульса и продифференцируем его
143
Запишем момент импульса и продифференцируем его
143
Получили новое выражение, которое называется уравнением моментов или основное уравнение динамики
143
Получили новое выражение, которое называется уравнением моментов или основное уравнение динамики
143
Из основного уравнения динамики вращательного движения
Можно получить закон сохранения момента импульса
143
Из основного уравнения динамики вращательного движения Можно получить закон сохранения момента импульса
143
Пространство однородно, следовательно, параллельный перенос системы из одного места в другое
143
Пространство однородно, следовательно, параллельный перенос системы из одного места в другое
143
Пространство изотропно, следовательно, поворот замкнутой системы как целого не отражается на
143
Пространство изотропно, следовательно, поворот замкнутой системы как целого не отражается на
143
143
143
Вопрос № 8.
Кинетическая энергия.
Работа постоянной и переменной силы.
Мощность.
1-я и 2-я космические
143
Вопрос № 8. Кинетическая энергия. Работа постоянной и переменной силы. Мощность. 1-я и 2-я космические
143
Запишем уравнение движения частицы и домножим на перемещение (dS = v
143
Запишем уравнение движения частицы и домножим на перемещение (dS = v
143
Если система замкнута, то Fвнеш = 0
T – кинетическая энергия
143
Если система замкнута, то Fвнеш = 0
T – кинетическая энергия
143
Если на частицу действует постоянная сила F, кинетическая энергия не остаётся
143
Если на частицу действует постоянная сила F, кинетическая энергия не остаётся
143
Пример: Вычислим работу, которую совершают внешние силы при сжатии пружины (работа
143
Пример: Вычислим работу, которую совершают внешние силы при сжатии пружины (работа
143
Мощность – работа совершаемая в единицу времени
143
Мощность – работа совершаемая в единицу времени
143
Запишем закон всемирного тяготения и потенциальную энергию гравитационного взаимодействия
здесь G =
143
Запишем закон всемирного тяготения и потенциальную энергию гравитационного взаимодействия здесь G =
143
1-я космическая скорость – скорость, с которой тело движется над поверхностью
143
1-я космическая скорость – скорость, с которой тело движется над поверхностью
143
Если тело получит достаточное количество энергии (кинетической), то эта энергия будет
143
Если тело получит достаточное количество энергии (кинетической), то эта энергия будет
143
143
143
Вопрос № 9.
Консервативные силы.
Потенциальная энергия.
Связь силы и потенциальной энергии (условие потенциальности).
143
Вопрос № 9.
Консервативные силы.
Потенциальная энергия.
Связь силы и потенциальной энергии (условие потенциальности).
143
Взаимодействие между телами осуществляется посредством физических полей. Каждое тело создаёт вокруг
143
Взаимодействие между телами осуществляется посредством физических полей. Каждое тело создаёт вокруг
143
Центральное поле – сила, действующая на любую точку в пространстве направлена
143
Центральное поле – сила, действующая на любую точку в пространстве направлена
143
Консервативные силы:
1) Это силы, работа которых не зависит от пути, по
143
Консервативные силы: 1) Это силы, работа которых не зависит от пути, по
143
Потенциальная энергия
Если работа зависит только от начального и конечного положений, то
143
Потенциальная энергия Если работа зависит только от начального и конечного положений, то
143
Через эту функцию можно определить работу по перемещению частицы из 1-го
143
Через эту функцию можно определить работу по перемещению частицы из 1-го
143
Зная вид U(x, y, z) можно найти силу, действующую на частицу
143
Зная вид U(x, y, z) можно найти силу, действующую на частицу
143
Если полагать, что изменений силы вдоль других осей нет или рассматривать
143
Если полагать, что изменений силы вдоль других осей нет или рассматривать
143
Если учитывать все компоненты, то получим:
143
Если учитывать все компоненты, то получим:
143
Здесь grad – это оператор набла или градиент – вектор, направленный
143
Здесь grad – это оператор набла или градиент – вектор, направленный
143
Условие потенциальности
Поля, которые можно описывать функцией П(x, y, z, t), называются
143
Условие потенциальности Поля, которые можно описывать функцией П(x, y, z, t), называются
143
В случае стационарного поля, его силы будут консервативными
П(x, y, z)
143
В случае стационарного поля, его силы будут консервативными П(x, y, z)
143
143
143
Вопрос № 10.
Закон сохранения механической энергии изолированной системы и однородность времени.
Обобщённый
143
Вопрос № 10. Закон сохранения механической энергии изолированной системы и однородность времени. Обобщённый
143
Закон сохранения энергии в механике
Полная механическая энергия замкнутой изолированной системы
143
Закон сохранения энергии в механике Полная механическая энергия замкнутой изолированной системы
143
Кинетическая энергия поступательного движения
Кинетическая энергия вращательного движения
143
Кинетическая энергия поступательного движения
Кинетическая энергия вращательного движения
143
Потенциальная энергия деформированной пружины
Потенциальная энергия гравитационного
взаимодействия двух тел
143
Потенциальная энергия деформированной пружины
Потенциальная энергия гравитационного
взаимодействия двух тел
143
Если в системе есть силы приводящие к потери механической энергии (диссипативные),
143
Если в системе есть силы приводящие к потери механической энергии (диссипативные),
143
В основе сохранения энергии лежит однородность времени, т.е. равнозначность всех моментов
143
В основе сохранения энергии лежит однородность времени, т.е. равнозначность всех моментов
143
Движение частицы в потенциальном поле: Если полная энергия частицы меньше значения
143
Движение частицы в потенциальном поле: Если полная энергия частицы меньше значения
143
143
143
Законы Кеплера
1) Каждая планета движется по эллипсу, в одном из фокусов
143
Законы Кеплера 1) Каждая планета движется по эллипсу, в одном из фокусов
143
143
143
3) Квадраты периодов обращений планет относятся как кубы больших осей эллиптических
143
3) Квадраты периодов обращений планет относятся как кубы больших осей эллиптических
143
На основе законов Кеплера Ньютон открыл закон всемирного тяготения
здесь G =
143
На основе законов Кеплера Ньютон открыл закон всемирного тяготения здесь G =
200
Абсолютно упругий удар – удар, при котором механическая энергия тел не
200
Абсолютно упругий удар – удар, при котором механическая энергия тел не
200
Закон сохранения импульса выполняется в обоих случаях. Закон сохранения энергии выполняется
200
Закон сохранения импульса выполняется в обоих случаях. Закон сохранения энергии выполняется
200
Рассмотрим абсолютно неупругий удар двух шаров массами m1 и m2. Удар
200
Рассмотрим абсолютно неупругий удар двух шаров массами m1 и m2. Удар
200
m1 V10 V20 m2,
V
200
m1 V10 V20 m2,
V
200
Рассмотрим абсолютно упругий центральный удар. В этом случае необходимо записать закон
200
Рассмотрим абсолютно упругий центральный удар. В этом случае необходимо записать закон
200
m1 V10 V20 m2,
V1 V2
200
m1 V10 V20 m2,
V1 V2
200
Решив совместно эти уравнения получим выражения для скорости шаров после удара
200
Решив совместно эти уравнения получим выражения для скорости шаров после удара
200
Отметим, что если масса одно шара много больше второго, то его
200
Отметим, что если масса одно шара много больше второго, то его
200
Если при столкновении шаров один из них покоится и их массы
200
Если при столкновении шаров один из них покоится и их массы
200
Если при столкновении шаров один из них покоится и их массы
200
Если при столкновении шаров один из них покоится и их массы
200
200
 Бензиновые двигатели с непосредственным впрыском АВ120
Бензиновые двигатели с непосредственным впрыском АВ120 Почему физику считают основой техники? 12f720 «Заряд»
Почему физику считают основой техники? 12f720 «Заряд» Энтропия. Тепловые двигатели. (Лекция 10)
Энтропия. Тепловые двигатели. (Лекция 10) Методика решения физических задач повышенной сложности
Методика решения физических задач повышенной сложности Метрологическое обеспечение аэродинамических испытаний
Метрологическое обеспечение аэродинамических испытаний Основы специальной теории относительности
Основы специальной теории относительности Явление электромагнитной индукции. Правило Ленца
Явление электромагнитной индукции. Правило Ленца Прикладные методы решения задач строительной механики
Прикладные методы решения задач строительной механики Радиоактивность. Альфа-, бета-, гамма-распад атомного ядра
Радиоактивность. Альфа-, бета-, гамма-распад атомного ядра Кинематика
Кинематика Свободное падение
Свободное падение Магнітне поле постійного струму
Магнітне поле постійного струму Как сделать воздух проводником
Как сделать воздух проводником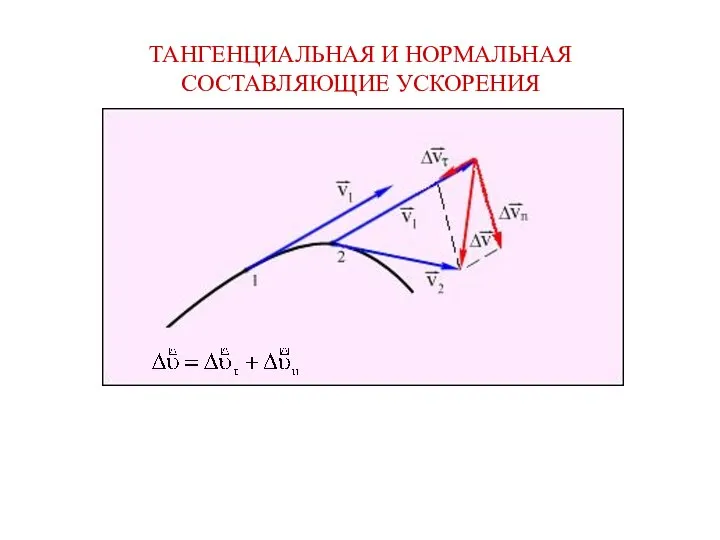 Тангенциальная и нормальная составляющие ускорения
Тангенциальная и нормальная составляющие ускорения Резонанс. Колебание
Резонанс. Колебание Ядерный топливный цикл: основы
Ядерный топливный цикл: основы Импульс тела
Импульс тела Основные параметры газа
Основные параметры газа Урок – игра «Кинематика»
Урок – игра «Кинематика»  Общая энергетика
Общая энергетика Электромагнитные колебания. Колебательный контур
Электромагнитные колебания. Колебательный контур Материалы к уроку по теме Механические волны
Материалы к уроку по теме Механические волны Закон всемирного тяготения Движение планет
Закон всемирного тяготения Движение планет  ЗАРОЖДЕНИЕ ОПТИКИ. ПЛОСКОЕ ЗЕРКАЛО (оптика ранней Античности) Оптика – наука, которая уже в древности прямо или косвенно была связана с практическими нуждами. Греческие геометры, приступив к исследованию оптических явлений, в том числе атмосферной оптик
ЗАРОЖДЕНИЕ ОПТИКИ. ПЛОСКОЕ ЗЕРКАЛО (оптика ранней Античности) Оптика – наука, которая уже в древности прямо или косвенно была связана с практическими нуждами. Греческие геометры, приступив к исследованию оптических явлений, в том числе атмосферной оптик Алюминий, его свойства и применение
Алюминий, его свойства и применение Основы вибрационного контроля
Основы вибрационного контроля Посадка водителя за рулем. Приемы действий органами управления
Посадка водителя за рулем. Приемы действий органами управления 25.8. Элементы зонной теории твердого тела
25.8. Элементы зонной теории твердого тела