- lec06

Содержание
- 2. Полигональные сетки (Polygonal meshes) Полигональные сетки – набор полигонов (граней), которые в совокупности формируют оболочку объекта
- 3. Достоинства полигональных сеток Основаны на простоте использования полигонов: Легко представлять и преобразовывать Обладают простыми свойствами Единственный
- 4. Пример:
- 5. Монолитные объекты и тонкие оболочки Полигональные сетки позволяют задавать объекты двух типов: Монолитные (solid) объекты полигональные
- 6. Примеры:
- 7. Вершины полигона Каждый полигон определяется путем перечисления его вершин Вершина задается при помощи перечисления ее координат
- 8. Пример представления вершины полигона struct Vertex { GLfloat x; GLfloat y; GLfloat z; };
- 9. Нормаль к полигону Вектор нормали задает направление перпендикуляра грани При рисовании объекта эта информация используется для
- 10. Пример представления нормали полигона struct Normal { GLfloat x; GLfloat y; GLfloat z; };
- 11. Нормали в вершинах и нормали в поверхностях Использование нормалей к грани плохо подходит для визуализации гладких
- 12. В OpenGL нормаль является атрибутом вершины С т.з. быстродействия выгоднее хранить отдельную копию вектора нормали для
- 13. Пример структур данных для хранения сеток struct Vector3d { GLfloat x, y, z; }; struct Mesh
- 14. Возможные вариации Если полигональная сетка задается при помощи однотипных примитивов, например, треугольников, то можно представить грани
- 15. Пример struct Vector3d { GLfloat x, y, z; }; struct Mesh { GLuint numVertices; Vertex *pVertices;
- 16. Лицевые и нелицевые стороны граней Каждая плоская грань (полигон) имеет две стороны: лицевую (видна извне объекта)
- 17. Определение видимой стороны грани Для определения стороны грани, повернутой к наблюдателю, OpenGL использует направление обхода вершин
- 18. Обход сторон куба против часовой стрелки
- 19. Команда glFrontFace Задает направление обхода вершин грани, соответствующее ее лицевой стороне (Front face): void glFrontFace(GLenum mode)
- 20. Режим отбраковки граней (Face culling) После того, как направление обхода вершин грани установлено, OpenGL может произвести
- 21. Управление режимом отбраковки граней glEnable(GL_CULL_FACE) glDisable(GL_CULL_FACE) void glCullFace(GLenum mode) где mode: GL_FRONT GL_BACK GL_FRONT_AND_BACK
- 22. Нахождение нормальных векторов (нормалей) Координаты нормалей для каждой вершины можно задавать: вручную (в процессе моделирования) вычислять
- 23. Задание нормалей вручную Позволяет задать нормали к поверхности способом, лучшим с точки зрения дизайнера Основной недостаток
- 24. Редактирование нормалей в программе 3D Studio Max
- 25. Аналитический метод нахождения нормалей Для функционально заданных поверхностей вектор нормали по направлению совпадает с вектором градиента
- 26. Вычисление нормалей для плоских граней полигональной сетки Для плоских граней сетки достаточно вычислить перпендикуляр к каждой
- 27. Метод Ньюэла для нахождения нормали к плоской грани Разработан Мартином Ньюэллом Решает указанные проблемы простого способа
- 28. Нахождение нормали к вершинам сетки, описывающим криволинейную поверхность Грани сетки, описывающей криволинейную поверхность, могут иметь общие
- 29. Свойства сеток Монолитность Совокупность грани сетки заключает в себе некоторое пространство Связность Между любыми двумя вершинами
- 30. Моделирование поверхностей вращения Поверхность вращения образуется посредством вращательной развертки с заметанием профильной кривой C вокруг некоторой
- 31. Создание поверхности вращения
- 32. Поверхности на базе функций двух переменных Некоторые поверхности однозначны в одном измерении, поэтому могут быть явно
- 33. Пример поверхности заданной, функцией sinc с круговой симметрией
- 34. Визуализация трехмерных сцен
- 35. Задачи Для визуализации трехмерной сцены при помощи OpenGL необходимо решить ряд задач: Очистка буфера кадра Настройка
- 36. Очистка буфера кадра Очистка буфера кадра осуществляет заполнение одного или нескольких буферов, входящих в состав буфера
- 37. Команда glClear Выполняет очистку одного или нескольких указанных буферов: void glClear(GLbitfield mask) где mask – комбинация
- 38. Команда glClearColor Задает значение цвета, используемого при очистке буфера цветов void glClearColor( GLclampf red, GLclampf green,
- 39. Команда glClearDepth Задает значение глубины, используемое для очистки буфера глубины void glClearDepth(GLclampd depth) По умолчанию это
- 40. Команда glClearStencil Устанавливает целочисленное значение, используемое для очистки буфера трафарета void glClearStencil(GLint stencil) Допустимые значения –
- 41. Установка порта просмотра и матрицы проецирования Порт просмотра задает область окна, в которую будет осуществляться вывод
- 42. Команда glViewPort Устанавливает положение и размеры порта просмотра, осуществляя аффинное преобразование вершин из нормализованных координат устройства
- 43. Установка матрицы перспективного преобразования OpenGL позволяет построить матрицу перспективного преобразования несколькими способами: По координатам плоскостей, задающих
- 44. Команда glFrustum Задает перспективное преобразование отображаемого объема по заданным координатам ограничивающих этот объем плоскостей void glFrustum(
- 45. Геометрический смысл параметров glFrustum znear zfar bottom top right left
- 46. Точность хранения значений в буфере глубины Точность хранения значений в буфере глубины определяется не только разрядностью
- 47. Команда gluPerspective Задает матрицу перспективного проецирования по заданному углу обзора вдоль оси Y, соотношению ширины и
- 48. Установка и ориентирование камеры Библиотека утилит OpenGL (GLU) позволяет задать положение наблюдателя, зная координаты его глаза,
- 49. Пример установки камеры // текущая матрица – матрица моделирования-вида glMatrixMode(GL_MODELVEIW); // сбрасываем ранее заданные преобразования glLoadIdentity();
- 50. Размещение объектов на сцене Ориентацию и положение объектов на сцене можно задать при помощи аффинных преобразований
- 51. Пример // устанавливаем матрицу камеры // .. // перенос объекта glTranslated(3, 3, 2); // вращение на
- 52. Комбинация матричных преобразований Каждая вершина примитива умножается на некоторую матрицу T равную: T = P x
- 53. Визуализация объектов Визуализация объектов заключатся в рисовании примитивов, составляющих этот объект Выполнение серий командных скобок glBegin()/glEnd()
- 54. Пример: void DrawSomeObject() { glBegin(GL_TRIANGLES); glNormald(1, 0, 0); glColor3f(0.1f, 1, 1); glVertex3f(3, 2, 3); //... glEnd();
- 55. Сокрытие невидимых линий и поверхностей Объекты, расположенные ближе к наблюдателю, могут полностью или частично перекрывать объекты,
- 57. Скачать презентацию
Полигональные сетки (Polygonal meshes)
Полигональные сетки – набор полигонов (граней), которые в
Полигональные сетки (Polygonal meshes)
Полигональные сетки – набор полигонов (граней), которые в
Достоинства полигональных сеток
Основаны на простоте использования полигонов:
Легко представлять и преобразовывать
Обладают
Достоинства полигональных сеток
Основаны на простоте использования полигонов:
Легко представлять и преобразовывать
Обладают

Пример:
Пример:
Монолитные объекты и тонкие оболочки
Полигональные сетки позволяют задавать объекты двух типов:
Монолитные
Монолитные объекты и тонкие оболочки
Полигональные сетки позволяют задавать объекты двух типов:
Монолитные
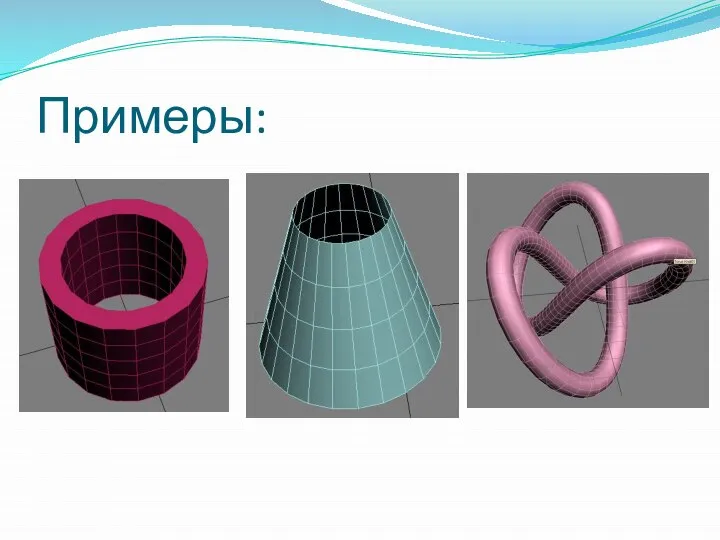
Примеры:
Примеры:
Вершины полигона
Каждый полигон определяется путем перечисления его вершин
Вершина задается при помощи
Вершины полигона
Каждый полигон определяется путем перечисления его вершин
Вершина задается при помощи
Пример представления вершины полигона
struct Vertex
{
GLfloat x;
GLfloat y;
GLfloat z;
};
Пример представления вершины полигона
struct Vertex
{
GLfloat x;
GLfloat y;
GLfloat z;
};
Нормаль к полигону
Вектор нормали задает направление перпендикуляра грани
При рисовании объекта эта
Нормаль к полигону
Вектор нормали задает направление перпендикуляра грани
При рисовании объекта эта
Пример представления нормали полигона
struct Normal
{
GLfloat x;
GLfloat y;
GLfloat z;
};
Пример представления нормали полигона
struct Normal
{
GLfloat x;
GLfloat y;
GLfloat z;
};
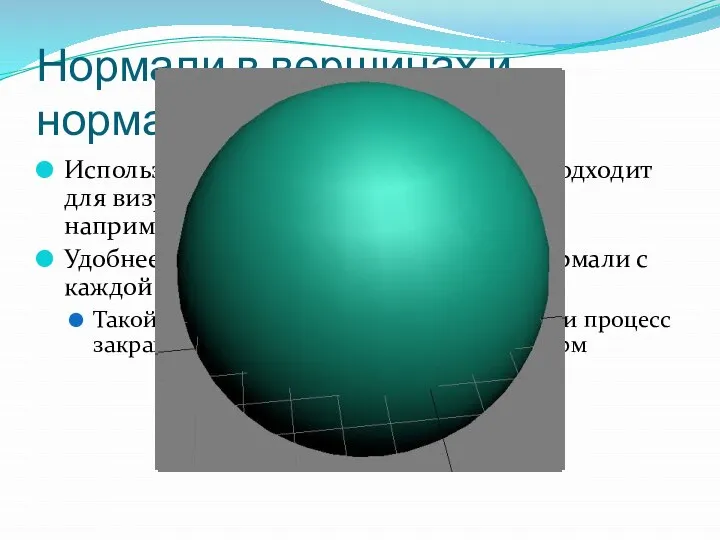
Нормали в вершинах и нормали в поверхностях
Использование нормалей к грани плохо
Нормали в вершинах и нормали в поверхностях
Использование нормалей к грани плохо
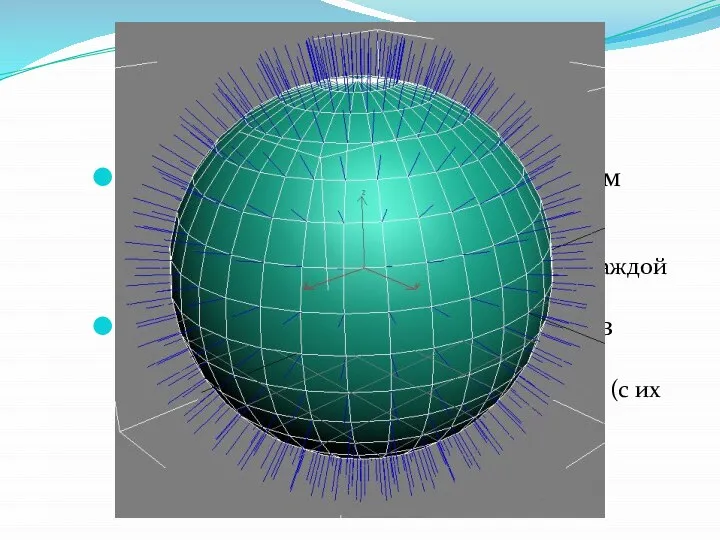
В OpenGL нормаль является атрибутом вершины
С т.з. быстродействия выгоднее хранить отдельную
В OpenGL нормаль является атрибутом вершины
С т.з. быстродействия выгоднее хранить отдельную
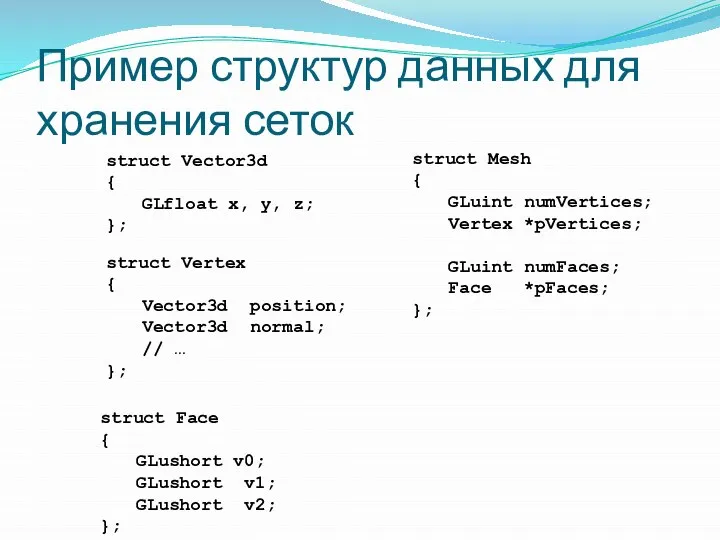
Пример структур данных для хранения сеток
struct Vector3d
{
GLfloat x, y, z;
};
struct Mesh
{
GLuint
Пример структур данных для хранения сеток
struct Vector3d
{
GLfloat x, y, z;
};
struct Mesh
{
GLuint
Возможные вариации
Если полигональная сетка задается при помощи однотипных примитивов, например, треугольников,
Возможные вариации
Если полигональная сетка задается при помощи однотипных примитивов, например, треугольников,
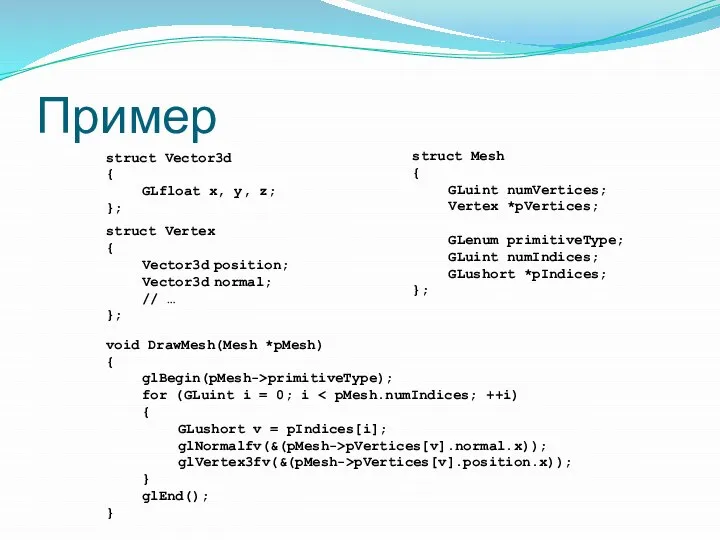
Пример
struct Vector3d
{
GLfloat x, y, z;
};
struct Mesh
{
GLuint numVertices;
Vertex *pVertices;
GLenum primitiveType;
GLuint numIndices;
GLushort *pIndices;
};
struct
Пример
struct Vector3d
{
GLfloat x, y, z;
};
struct Mesh
{
GLuint numVertices;
Vertex *pVertices;
GLenum primitiveType;
GLuint numIndices;
GLushort *pIndices;
};
struct
Лицевые и нелицевые стороны граней
Каждая плоская грань (полигон) имеет две стороны:
лицевую
Лицевые и нелицевые стороны граней
Каждая плоская грань (полигон) имеет две стороны:
лицевую
Определение видимой стороны грани
Для определения стороны грани, повернутой к наблюдателю, OpenGL
Определение видимой стороны грани
Для определения стороны грани, повернутой к наблюдателю, OpenGL
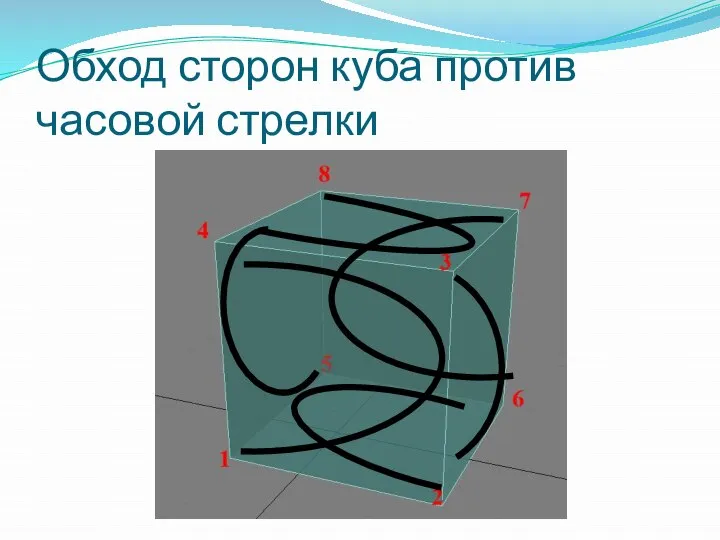
Обход сторон куба против часовой стрелки
Обход сторон куба против часовой стрелки
Команда glFrontFace
Задает направление обхода вершин грани, соответствующее ее лицевой стороне (Front
Команда glFrontFace
Задает направление обхода вершин грани, соответствующее ее лицевой стороне (Front
Режим отбраковки граней (Face culling)
После того, как направление обхода вершин грани
Режим отбраковки граней (Face culling)
После того, как направление обхода вершин грани
Управление режимом отбраковки граней
glEnable(GL_CULL_FACE)
glDisable(GL_CULL_FACE)
void glCullFace(GLenum mode)
где mode:
GL_FRONT
GL_BACK
GL_FRONT_AND_BACK
Управление режимом отбраковки граней
glEnable(GL_CULL_FACE)
glDisable(GL_CULL_FACE)
void glCullFace(GLenum mode)
где mode:
GL_FRONT
GL_BACK
GL_FRONT_AND_BACK
Нахождение нормальных векторов (нормалей)
Координаты нормалей для каждой вершины можно задавать:
вручную (в
Нахождение нормальных векторов (нормалей)
Координаты нормалей для каждой вершины можно задавать:
вручную (в
Задание нормалей вручную
Позволяет задать нормали к поверхности способом, лучшим с точки
Задание нормалей вручную
Позволяет задать нормали к поверхности способом, лучшим с точки
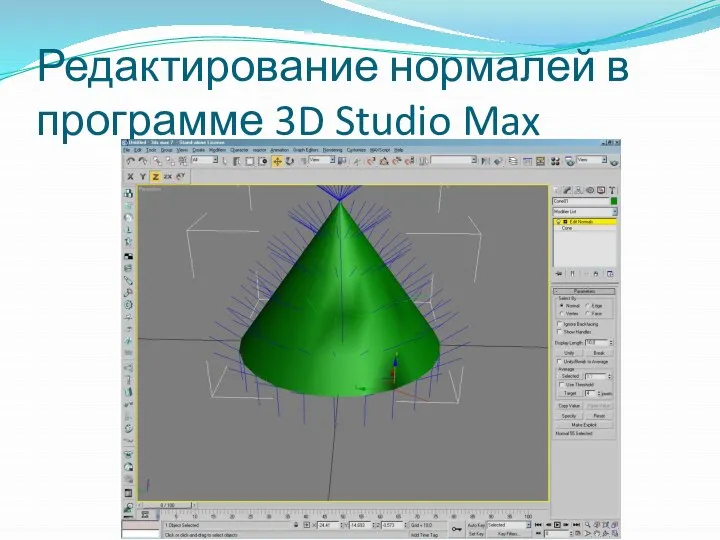
Редактирование нормалей в программе 3D Studio Max
Редактирование нормалей в программе 3D Studio Max
Аналитический метод нахождения нормалей
Для функционально заданных поверхностей вектор нормали по направлению
Аналитический метод нахождения нормалей
Для функционально заданных поверхностей вектор нормали по направлению
Вычисление нормалей для плоских граней полигональной сетки
Для плоских граней сетки достаточно
Вычисление нормалей для плоских граней полигональной сетки
Для плоских граней сетки достаточно
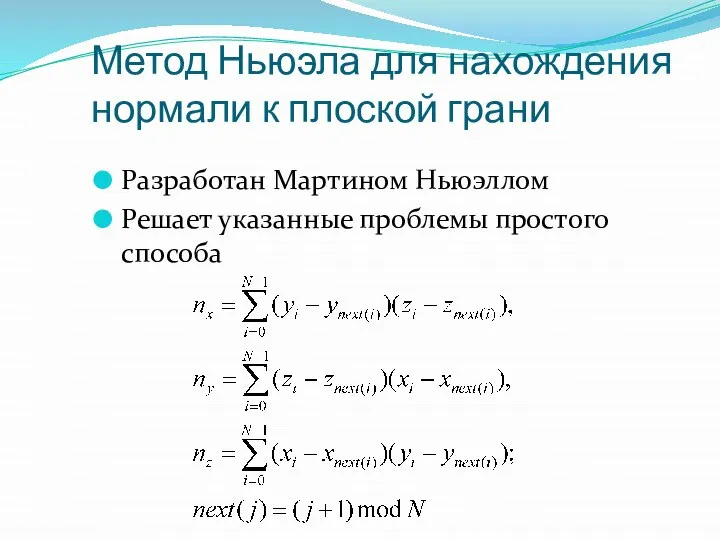
Метод Ньюэла для нахождения нормали к плоской грани
Разработан Мартином Ньюэллом
Решает указанные
Метод Ньюэла для нахождения нормали к плоской грани
Разработан Мартином Ньюэллом
Решает указанные
Нахождение нормали к вершинам сетки, описывающим криволинейную поверхность
Грани сетки, описывающей криволинейную
Нахождение нормали к вершинам сетки, описывающим криволинейную поверхность
Грани сетки, описывающей криволинейную
Свойства сеток
Монолитность
Совокупность грани сетки заключает в себе некоторое пространство
Связность
Между любыми двумя
Свойства сеток
Монолитность
Совокупность грани сетки заключает в себе некоторое пространство
Связность
Между любыми двумя
Моделирование поверхностей вращения
Поверхность вращения образуется посредством вращательной развертки с заметанием профильной
Моделирование поверхностей вращения
Поверхность вращения образуется посредством вращательной развертки с заметанием профильной
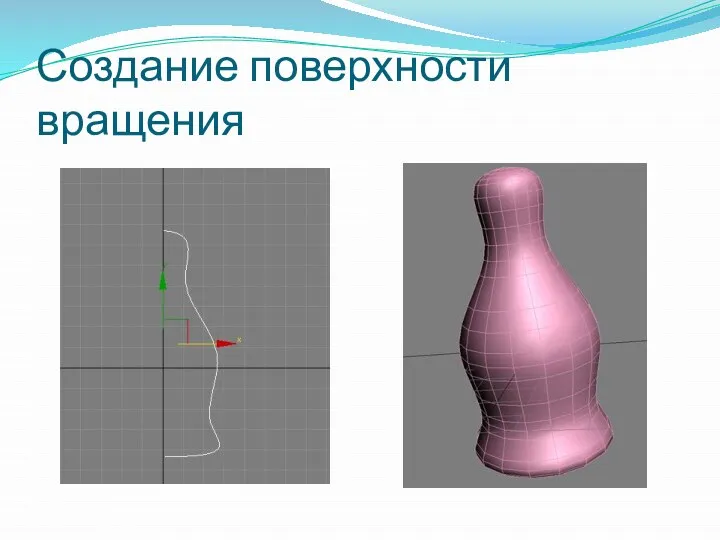
Создание поверхности вращения
Создание поверхности вращения
Поверхности на базе функций двух переменных
Некоторые поверхности однозначны в одном измерении,
Поверхности на базе функций двух переменных
Некоторые поверхности однозначны в одном измерении,
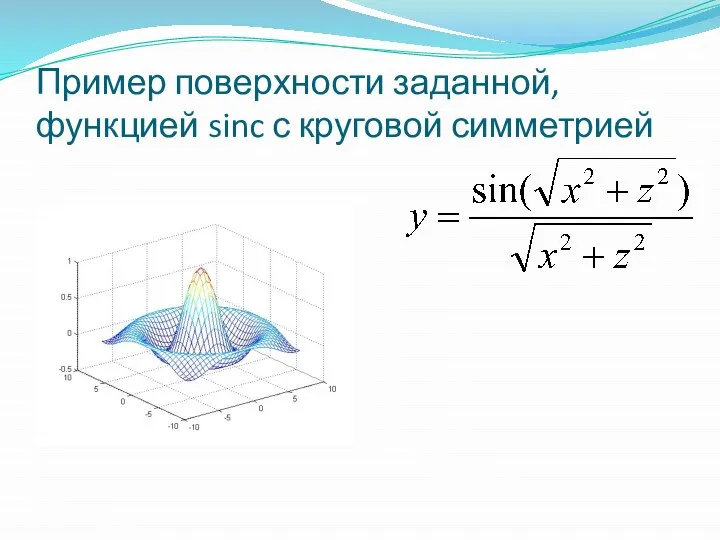
Пример поверхности заданной, функцией sinc с круговой симметрией
Пример поверхности заданной, функцией sinc с круговой симметрией
Визуализация трехмерных сцен
Визуализация трехмерных сцен
Задачи
Для визуализации трехмерной сцены при помощи OpenGL необходимо решить ряд задач:
Очистка
Задачи
Для визуализации трехмерной сцены при помощи OpenGL необходимо решить ряд задач:
Очистка
Очистка буфера кадра
Очистка буфера кадра осуществляет заполнение одного или нескольких буферов,
Очистка буфера кадра
Очистка буфера кадра осуществляет заполнение одного или нескольких буферов,
Команда glClear
Выполняет очистку одного или нескольких указанных буферов:
void glClear(GLbitfield mask)
где mask
Команда glClear
Выполняет очистку одного или нескольких указанных буферов:
void glClear(GLbitfield mask)
где mask
Команда glClearColor
Задает значение цвета, используемого при очистке буфера цветов
void glClearColor(
GLclampf red,
Команда glClearColor
Задает значение цвета, используемого при очистке буфера цветов
void glClearColor(
GLclampf red,
Команда glClearDepth
Задает значение глубины, используемое для очистки буфера глубины
void glClearDepth(GLclampd depth)
По
Команда glClearDepth
Задает значение глубины, используемое для очистки буфера глубины
void glClearDepth(GLclampd depth)
По
Команда glClearStencil
Устанавливает целочисленное значение, используемое для очистки буфера трафарета
void glClearStencil(GLint stencil)
Допустимые
Команда glClearStencil
Устанавливает целочисленное значение, используемое для очистки буфера трафарета
void glClearStencil(GLint stencil)
Допустимые
Установка порта просмотра и матрицы проецирования
Порт просмотра задает область окна, в
Установка порта просмотра и матрицы проецирования
Порт просмотра задает область окна, в
Команда glViewPort
Устанавливает положение и размеры порта просмотра, осуществляя аффинное преобразование вершин
Команда glViewPort
Устанавливает положение и размеры порта просмотра, осуществляя аффинное преобразование вершин
Установка матрицы перспективного преобразования
OpenGL позволяет построить матрицу перспективного преобразования несколькими способами:
По
Установка матрицы перспективного преобразования
OpenGL позволяет построить матрицу перспективного преобразования несколькими способами:
По
Команда glFrustum
Задает перспективное преобразование отображаемого объема по заданным координатам ограничивающих этот
Команда glFrustum
Задает перспективное преобразование отображаемого объема по заданным координатам ограничивающих этот
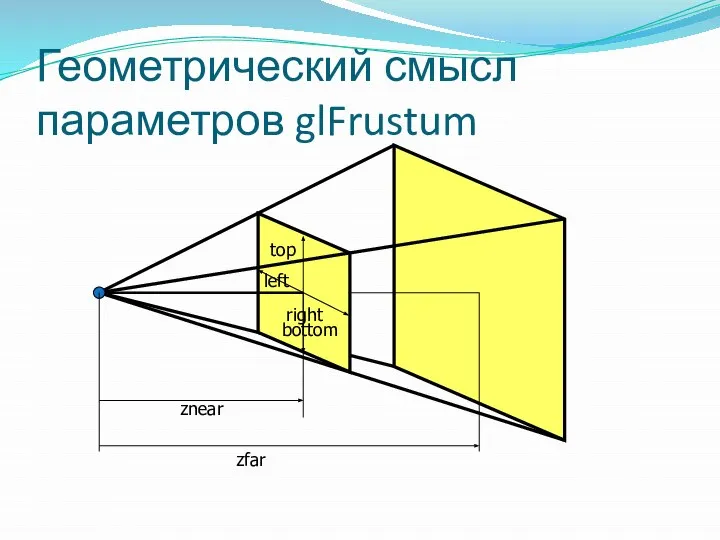
Геометрический смысл параметров glFrustum
znear
zfar
bottom
top
right
left
Геометрический смысл параметров glFrustum
znear
zfar
bottom
top
right
left
Точность хранения значений в буфере глубины
Точность хранения значений в буфере глубины
Точность хранения значений в буфере глубины
Точность хранения значений в буфере глубины
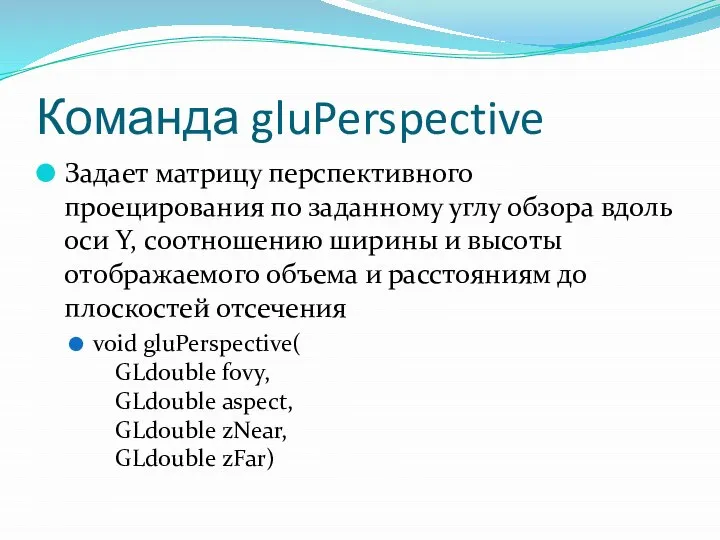
Команда gluPerspective
Задает матрицу перспективного проецирования по заданному углу обзора вдоль оси
Команда gluPerspective
Задает матрицу перспективного проецирования по заданному углу обзора вдоль оси
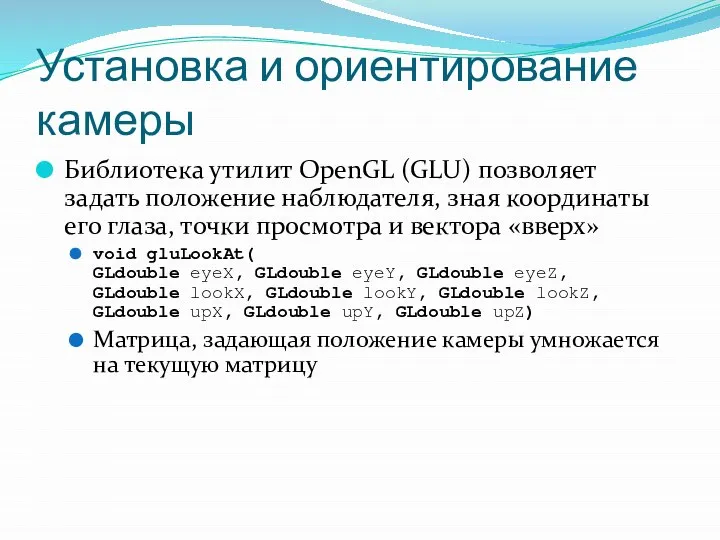
Установка и ориентирование камеры
Библиотека утилит OpenGL (GLU) позволяет задать положение наблюдателя,
Установка и ориентирование камеры
Библиотека утилит OpenGL (GLU) позволяет задать положение наблюдателя,
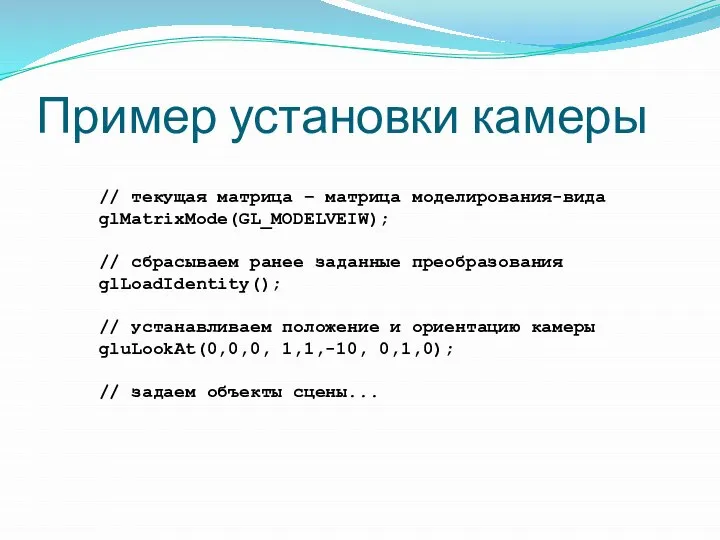
Пример установки камеры
// текущая матрица – матрица моделирования-вида
glMatrixMode(GL_MODELVEIW);
// сбрасываем ранее заданные
Пример установки камеры
// текущая матрица – матрица моделирования-вида
glMatrixMode(GL_MODELVEIW);
// сбрасываем ранее заданные
Размещение объектов на сцене
Ориентацию и положение объектов на сцене можно задать
Размещение объектов на сцене
Ориентацию и положение объектов на сцене можно задать
Пример
// устанавливаем матрицу камеры
// ..
// перенос объекта
glTranslated(3, 3, 2);
// вращение на
Пример
// устанавливаем матрицу камеры
// ..
// перенос объекта
glTranslated(3, 3, 2);
// вращение на
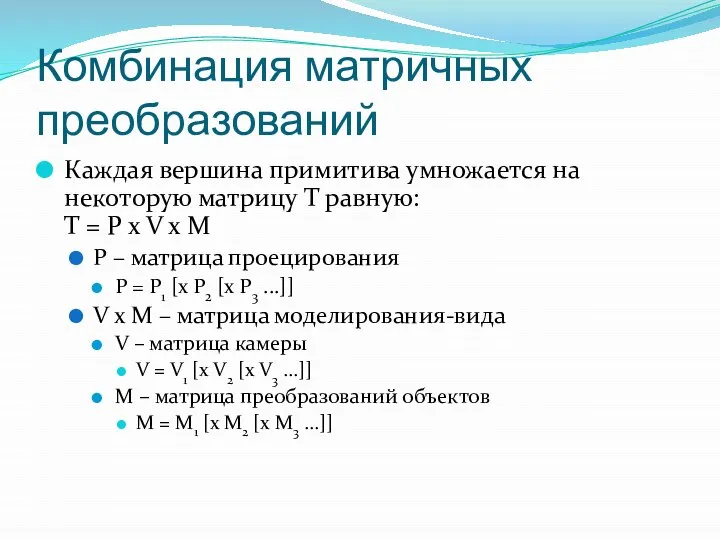
Комбинация матричных преобразований
Каждая вершина примитива умножается на некоторую матрицу T равную:
T
Комбинация матричных преобразований
Каждая вершина примитива умножается на некоторую матрицу T равную: T
Визуализация объектов
Визуализация объектов заключатся в рисовании примитивов, составляющих этот объект
Выполнение серий
Визуализация объектов
Визуализация объектов заключатся в рисовании примитивов, составляющих этот объект
Выполнение серий
Пример:
void DrawSomeObject()
{
glBegin(GL_TRIANGLES);
glNormald(1, 0, 0);
glColor3f(0.1f, 1, 1);
glVertex3f(3, 2, 3);
//...
glEnd();
// ...
}
Пример:
void DrawSomeObject()
{
glBegin(GL_TRIANGLES);
glNormald(1, 0, 0);
glColor3f(0.1f, 1, 1);
glVertex3f(3, 2, 3);
//...
glEnd();
// ...
}
Сокрытие невидимых линий и поверхностей
Объекты, расположенные ближе к наблюдателю, могут полностью
Сокрытие невидимых линий и поверхностей
Объекты, расположенные ближе к наблюдателю, могут полностью
 Розробка електронної бібліотеки
Розробка електронної бібліотеки Телевидение города Красноярск
Телевидение города Красноярск Основные алгоритмические конструкции. 7 класс
Основные алгоритмические конструкции. 7 класс Понятие информации. Виды информации. Информационные процессы
Понятие информации. Виды информации. Информационные процессы Защита Инстаграм аккаунта
Защита Инстаграм аккаунта Электронный учет питания
Электронный учет питания Обработка информации
Обработка информации Системы счисления. Математические основы информатики
Системы счисления. Математические основы информатики Посвящение в студенты Малой Компьютерной Академии
Посвящение в студенты Малой Компьютерной Академии Файл и файловая система. Решение задач
Файл и файловая система. Решение задач Прикладное программирование. Строки
Прикладное программирование. Строки Организация документооборота. Информационно-поисковые справочники
Организация документооборота. Информационно-поисковые справочники Программное обеспечение компьютера
Программное обеспечение компьютера Компьютерные технологии. Mathcad 15
Компьютерные технологии. Mathcad 15 Анализ влияния структуры капитала банка на его устойчивость в условиях банковского кризиса. StatSoft Russia
Анализ влияния структуры капитала банка на его устойчивость в условиях банковского кризиса. StatSoft Russia Информационное моделирование на компьютере
Информационное моделирование на компьютере Работа с браузером
Работа с браузером Функции интерфейсов
Функции интерфейсов Технология Adobe Flash
Технология Adobe Flash Приобретение знаний. Извлечение знаний из данных. Курс «Интеллектуальные информационные системы» Лекция 7
Приобретение знаний. Извлечение знаний из данных. Курс «Интеллектуальные информационные системы» Лекция 7  CSS Селекторы
CSS Селекторы Третий урок по web программированию
Третий урок по web программированию Системы счисления. Что такое информация?
Системы счисления. Что такое информация? Презентация "Принтер" - скачать презентации по Информатике
Презентация "Принтер" - скачать презентации по Информатике АИС Продажа автобусных билетов
АИС Продажа автобусных билетов Компьютерная графика в школе
Компьютерная графика в школе Создание презентаций
Создание презентаций Создание запросов
Создание запросов