- Нейро-компьютерный интерфейс

Содержание
- 2. Определение Нейро-компьютерный интерфейс или нейроинтерфейс – это физический интерфейс приема или передачи сигналов между живыми нейронами
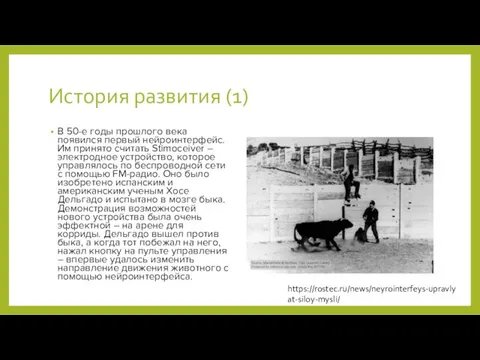
- 3. История развития (1) В 50-е годы прошлого века появился первый нейроинтерфейс. Им принято считать Stimoceiver –
- 4. История развития (2) в середине 1960-х гг. проводились эксперименты на обезьянах, которым имплантировали мультиэлектродные матрицы для
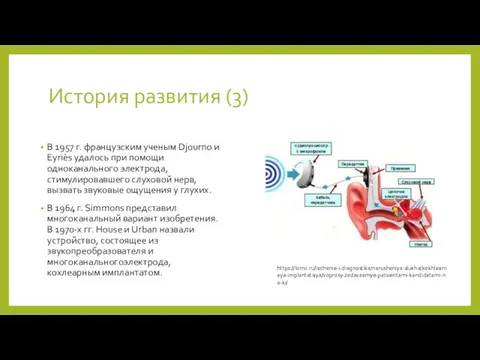
- 5. История развития (3) В 1957 г. французским ученым Djourno и Eyriès удалось при помощи одноканального электрода,
- 6. История развития (4) Бурный скачок ИМК-исследований пришелся на 1990– 2000-е гг. Nicolelis и Chapin сконструировали ИМК,
- 7. История развития (5) В начале 2000-х гг. группа под руководством Donoghue работала с обезьянами и людьми,
- 8. Классификация Thorsten Zander предложил следующую классификацию: Активные – пользователь инициирует команду безусловно Реактивные – пользователь инициирует
- 9. Активный нейроинтерфейс Активный интерфейс использует изменения активности мозга, которая непосредственно и сознательно управляется человеком. Например, человек
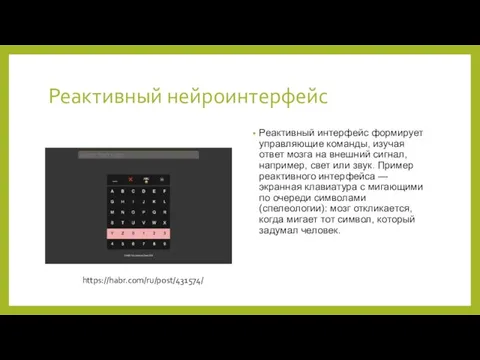
- 10. Реактивный нейроинтерфейс Реактивный интерфейс формирует управляющие команды, изучая ответ мозга на внешний сигнал, например, свет или
- 11. Пассивный нейроинтерфейс Пассивный интерфейс анализирует текущую активность головного мозга, которая возникает сама по себе, в процессе
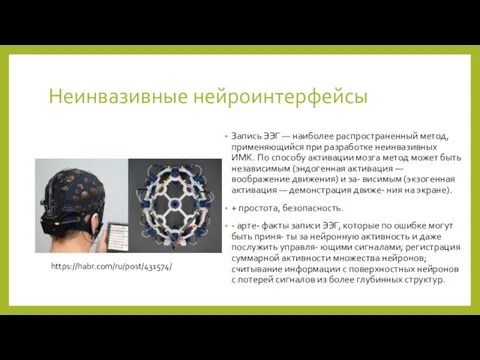
- 12. Неинвазивные нейроинтерфейсы Запись ЭЭГ — наиболее распространенный метод, применяющийся при разработке неинвазивных ИМК. По способу активации
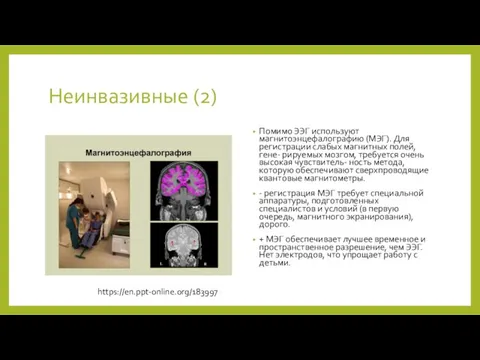
- 13. Неинвазивные (2) Помимо ЭЭГ используют магнитоэнцефалографию (МЭГ). Для регистрации слабых магнитных полей, гене- рируемых мозгом, требуется
- 14. Неинвазивные (3) Инфракрасное излучение проникает через кости черепа и прилегающие ткани в лобную и затылочную кору
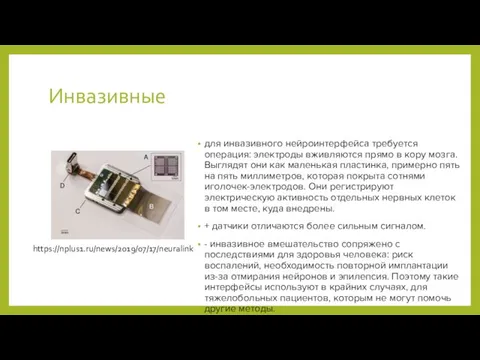
- 15. Инвазивные для инвазивного нейроинтерфейса требуется операция: электроды вживляются прямо в кору мозга. Выглядят они как маленькая
- 16. Как же это все работает?!
- 17. Алгоритм работы нейроинтерфейса Этап регистрации сигнала Манипулирование данными: взаимодействие с компьютером и обратная связь. Обработка сигнала:
- 18. Декодирование Потенциал действия изолированных нейронов соответствует конкретным поведенческим проявлениям. К примеру, возбуждение нейронов моторной коры определяет
- 19. Применение нейроинтерфейсов Нейропротезы Передвижение с помощью ФЭС Управление устройствами( инвалидные кресла, экзоскелет) Коммуникация (системы набора текста)
- 20. Ручной нейроинтерфейс инвазивный ИМК, с помощью которого обезьяны захватывали появляющиеся в различных местах объекты при помощи
- 21. ФЭС ФЭС-функциональная электростимуляция- применяется если конечность не утеряна, а только обездвиживание. С помощью электродных матриц происходит
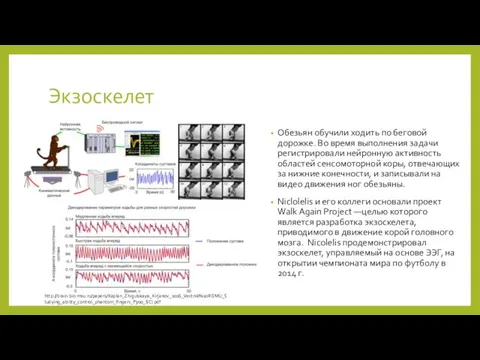
- 22. Экзоскелет Обезьян обучили ходить по беговой дорожке. Во время выполнения задачи регистрировали нейронную активность областей сенсомоторной
- 23. Виртуальная клавиатура в одном из вариантов пользователю надо представить, что он двигает рукой или ногой, чтобы
- 24. Список литературы Нейроинтерфейс: как и зачем, Алексей Павлов, Александр Храмов, 2019. Нейроинтерфейсы сегодня, 2018 Интерфейс мозг–компьютер:
- 26. Скачать презентацию
Определение
Нейро-компьютерный интерфейс или нейроинтерфейс – это физический интерфейс приема или
Определение
Нейро-компьютерный интерфейс или нейроинтерфейс – это физический интерфейс приема или
История развития (1)
В 50-е годы прошлого века появился первый нейроинтерфейс. Им
История развития (1)
В 50-е годы прошлого века появился первый нейроинтерфейс. Им
История развития (2)
в середине 1960-х гг. проводились эксперименты на обезьянах, которым
История развития (2)
в середине 1960-х гг. проводились эксперименты на обезьянах, которым
История развития (3)
В 1957 г. французским ученым Djourno и Eyriès удалось
История развития (3)
В 1957 г. французским ученым Djourno и Eyriès удалось
История развития (4)
Бурный скачок ИМК-исследований пришелся на 1990– 2000-е гг. Nicolelis
История развития (4)
Бурный скачок ИМК-исследований пришелся на 1990– 2000-е гг. Nicolelis
История развития (5)
В начале 2000-х гг. группа под руководством Donoghue работала
История развития (5)
В начале 2000-х гг. группа под руководством Donoghue работала
Классификация
Thorsten Zander предложил следующую классификацию:
Активные – пользователь инициирует команду безусловно
Реактивные –
Классификация
Thorsten Zander предложил следующую классификацию:
Активные – пользователь инициирует команду безусловно
Реактивные –
Активный нейроинтерфейс
Активный интерфейс использует изменения активности мозга, которая непосредственно и сознательно управляется
Активный нейроинтерфейс
Активный интерфейс использует изменения активности мозга, которая непосредственно и сознательно управляется
Реактивный нейроинтерфейс
Реактивный интерфейс формирует управляющие команды, изучая ответ мозга на внешний сигнал,
Реактивный нейроинтерфейс
Реактивный интерфейс формирует управляющие команды, изучая ответ мозга на внешний сигнал,
Пассивный нейроинтерфейс
Пассивный интерфейс анализирует текущую активность головного мозга, которая возникает
Пассивный нейроинтерфейс
Пассивный интерфейс анализирует текущую активность головного мозга, которая возникает
Неинвазивные нейроинтерфейсы
Запись ЭЭГ — наиболее распространенный метод, применяющийся при разработке
Неинвазивные нейроинтерфейсы
Запись ЭЭГ — наиболее распространенный метод, применяющийся при разработке
Неинвазивные (2)
Помимо ЭЭГ используют магнитоэнцефалографию (МЭГ). Для регистрации слабых магнитных полей,
Неинвазивные (2)
Помимо ЭЭГ используют магнитоэнцефалографию (МЭГ). Для регистрации слабых магнитных полей,
Неинвазивные (3)
Инфракрасное излучение проникает через кости черепа и прилегающие ткани в лобную и затылочную
Неинвазивные (3)
Инфракрасное излучение проникает через кости черепа и прилегающие ткани в лобную и затылочную
Инвазивные
для инвазивного нейроинтерфейса требуется операция: электроды вживляются прямо в кору
Инвазивные
для инвазивного нейроинтерфейса требуется операция: электроды вживляются прямо в кору
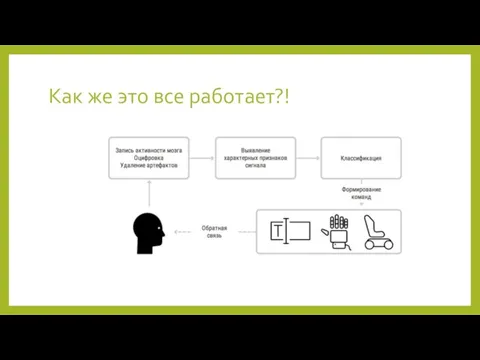
Как же это все работает?!
Как же это все работает?!
Алгоритм работы нейроинтерфейса
Этап регистрации сигнала
Манипулирование данными: взаимодействие с компьютером и обратная
Алгоритм работы нейроинтерфейса
Этап регистрации сигнала
Манипулирование данными: взаимодействие с компьютером и обратная
Декодирование
Потенциал действия изолированных нейронов соответствует конкретным поведенческим проявлениям. К примеру,
Декодирование
Потенциал действия изолированных нейронов соответствует конкретным поведенческим проявлениям. К примеру,
Применение нейроинтерфейсов
Нейропротезы
Передвижение с помощью ФЭС
Управление устройствами( инвалидные кресла, экзоскелет)
Коммуникация (системы
Применение нейроинтерфейсов
Нейропротезы
Передвижение с помощью ФЭС
Управление устройствами( инвалидные кресла, экзоскелет)
Коммуникация (системы

Ручной нейроинтерфейс
инвазивный ИМК, с помощью которого обезьяны захватывали появляющиеся в различных
Ручной нейроинтерфейс
инвазивный ИМК, с помощью которого обезьяны захватывали появляющиеся в различных
ФЭС
ФЭС-функциональная электростимуляция- применяется если конечность не утеряна, а только обездвиживание. С
ФЭС
ФЭС-функциональная электростимуляция- применяется если конечность не утеряна, а только обездвиживание. С
Экзоскелет
Обезьян обучили ходить по беговой дорожке. Во время выполнения задачи регистрировали
Экзоскелет
Обезьян обучили ходить по беговой дорожке. Во время выполнения задачи регистрировали
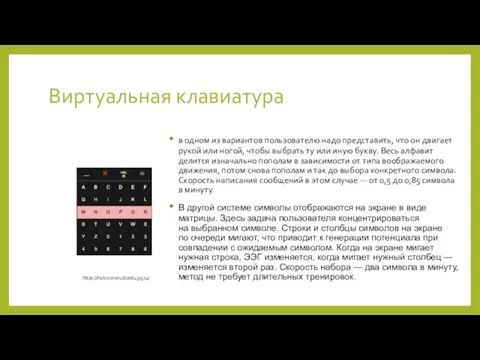
Виртуальная клавиатура
в одном из вариантов пользователю надо представить, что он двигает рукой или
Виртуальная клавиатура
в одном из вариантов пользователю надо представить, что он двигает рукой или
Список литературы
Нейроинтерфейс: как и зачем, Алексей Павлов, Александр Храмов, 2019.
Нейроинтерфейсы сегодня, 2018
Интерфейс
Список литературы
Нейроинтерфейс: как и зачем, Алексей Павлов, Александр Храмов, 2019.
Нейроинтерфейсы сегодня, 2018
Интерфейс
 Час занимательной информатики. 6 класс
Час занимательной информатики. 6 класс Вложенные условные операторы
Вложенные условные операторы Информационная система компании Starline, предоставляющей услуги мобильной связи
Информационная система компании Starline, предоставляющей услуги мобильной связи Что такое ARKit
Что такое ARKit Характеристики линии связи
Характеристики линии связи Принцип действия компьютера
Принцип действия компьютера RecyclerView. Компоненты RecyclerView
RecyclerView. Компоненты RecyclerView Представление информации в компьютере. Математические основы информатики
Представление информации в компьютере. Математические основы информатики Программирование на языке Паскаль. Ветвления
Программирование на языке Паскаль. Ветвления Хранимые процедуры. Функции
Хранимые процедуры. Функции Электронный бизнес. Основные понятия и определения
Электронный бизнес. Основные понятия и определения Бизнес-план интернет- магазина юридических услуг
Бизнес-план интернет- магазина юридических услуг Фотодело. Лучше один раз увидеть Чрезвычайные происшествия
Фотодело. Лучше один раз увидеть Чрезвычайные происшествия Хайрулина А.В., учитель информатики, МОУ СОШ №10, г.Кандалакша, Мурманской области
Хайрулина А.В., учитель информатики, МОУ СОШ №10, г.Кандалакша, Мурманской области Информационная безопасность во Вконтакте школьников
Информационная безопасность во Вконтакте школьников Проверка закономерностей
Проверка закономерностей CRM-системы
CRM-системы Основные понятия и модели систем управления базами данных
Основные понятия и модели систем управления базами данных Концепция web 2.0. Сеть второго поколения
Концепция web 2.0. Сеть второго поколения Архитектура ЭВМ
Архитектура ЭВМ ỨNG DỤNG MATLAB TRONG THIẾT KẾ BỘ LỌC
ỨNG DỤNG MATLAB TRONG THIẾT KẾ BỘ LỌC Алгебра высказываний. Основы логики
Алгебра высказываний. Основы логики Использование Amazon Web Services
Использование Amazon Web Services Система и окружающая среда Урок информатики в 7 классе
Система и окружающая среда Урок информатики в 7 классе Форматирование текста в Microsoft Word
Форматирование текста в Microsoft Word WEB - проектирование
WEB - проектирование Триггеры в презентации. Лабораторная работа
Триггеры в презентации. Лабораторная работа Типы алгоритмов. Линейный алгоритм
Типы алгоритмов. Линейный алгоритм