-
Раздел 17 Внешние переменные, передаточные функции и элементы NOLIN

Содержание
- 2. Раздел 17. Внешние переменные, передаточные функции и элементы NOLIN ВНЕШНИЕ ПЕРЕМЕННЫЕ..………………………………….………………………17 - 3 ПЕРЕДАТОЧНЫЕ ФУНКЦИИ...………………………………………..……………. 17
- 3. Внешние переменные Степени свободы, не связанные с конструкцией используются для представления не связанных с конструкцией переменных.
- 4. Передаточные функции Передаточные функции (ПФ) используются для задания динамических связей в форме: где ud - зависимая
- 5. Нелинейные силовые факторы Нелинейные силовые факторы, прикладываемые к узлам N(t) – нелинейная сила (момент), являющаяся функцией
- 6. Нелинейные силовые факторы Нелинейные силы представляют отклонения от линейных зависимостей. Наиболее просто используется при прямом методе
- 7. Особенности использования нелинейных сил Нелинейные силы вычисляются по результатам, полученным на предыдущем шаге. Меньшее значение Δt
- 8. Элементы NOLINS NOLIN1 – нелинейная сила в форме таблицы Функция перемещения Функция скорости NOLIN2 – нелинейная
- 9. Элементы NOLINS NOLIN3 – нелинейная сила в форме экспоненциальной функции положительного аргумента где Xj может быть
- 10. Пример №13 Нелинейный анализ переходного процесса с использованием элементов NOLIN
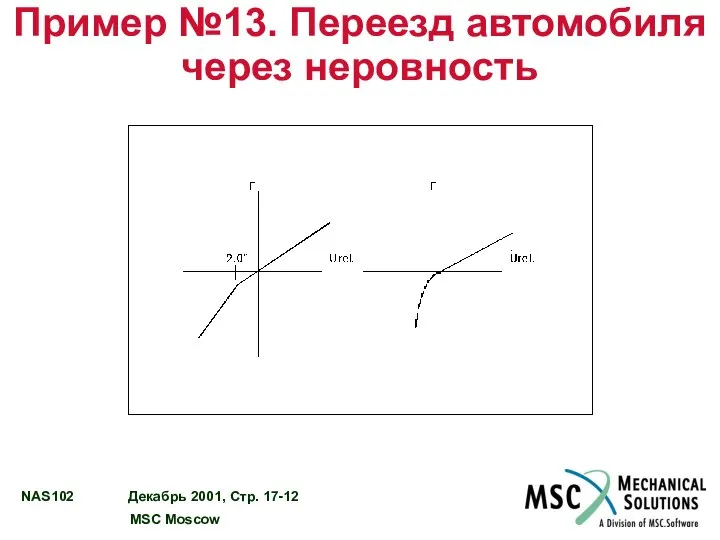
- 11. Пример №13. Переезд автомобиля через неровность Выполните моделирование переезда автомобиля через неровность, используя элементы NOLIN.
- 12. Пример №13. Переезд автомобиля через неровность
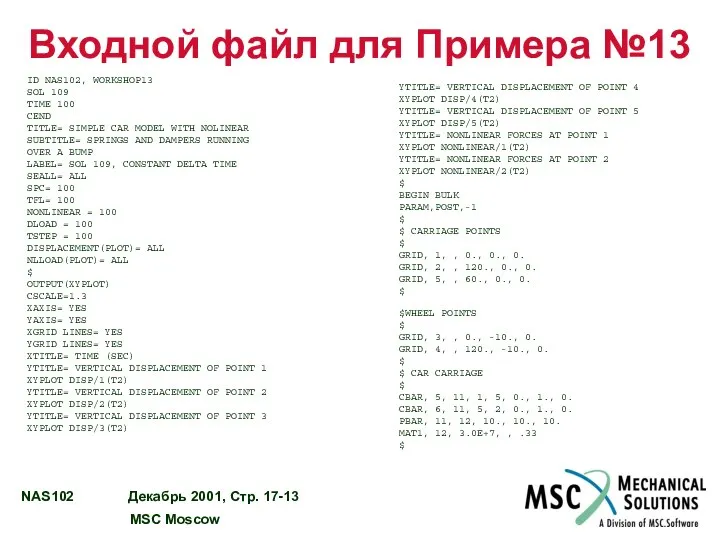
- 13. Входной файл для Примера №13 ID NAS102, WORKSHOP13 SOL 109 TIME 100 CEND TITLE= SIMPLE CAR
- 14. Входной файл для Примера №13 $ $ CONSTRAINTS TO ELIMINATE RIGID-BODY MODES $ SPC1, 100, 1345,
- 15. Результаты решения Примера №13 0 X Y - O U T P U T S U
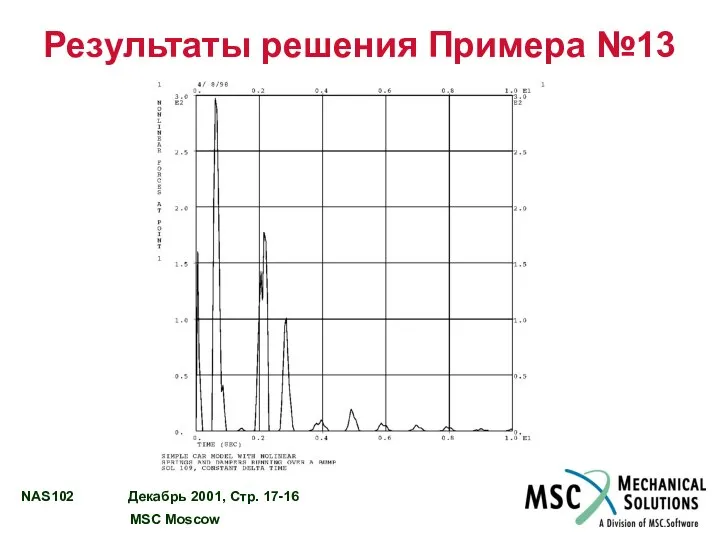
- 16. Результаты решения Примера №13
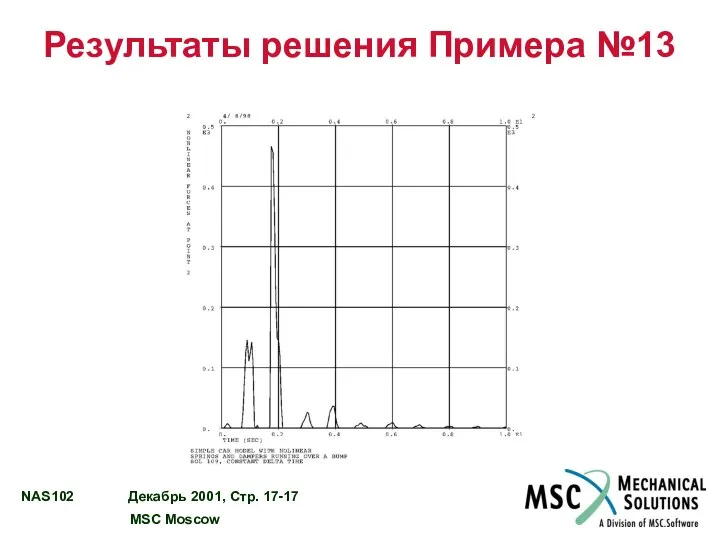
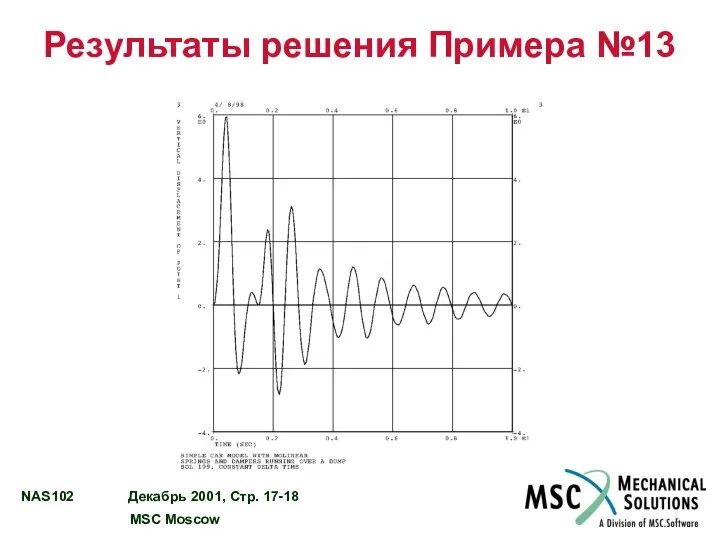
- 17. Результаты решения Примера №13
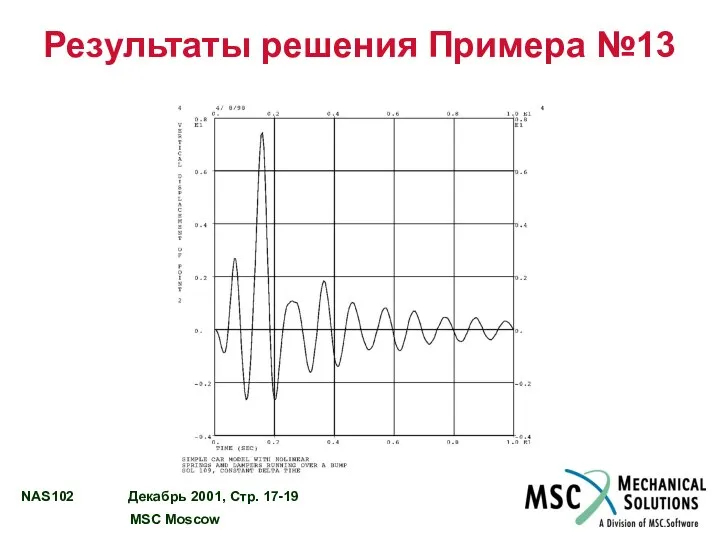
- 18. Результаты решения Примера №13
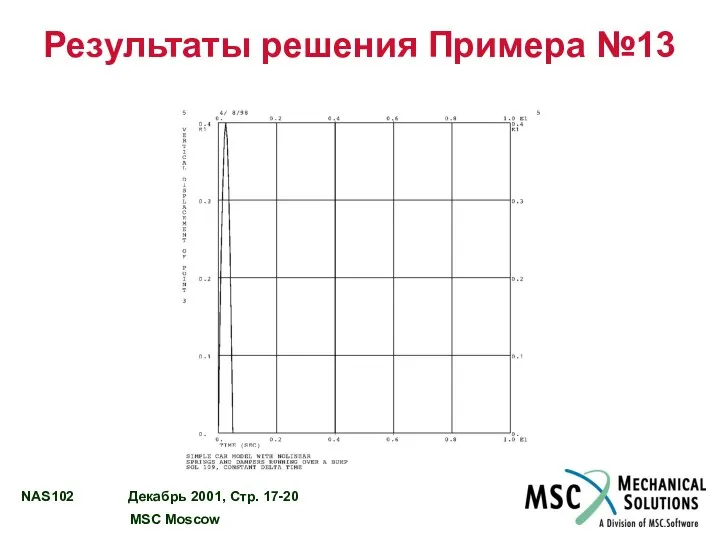
- 19. Результаты решения Примера №13
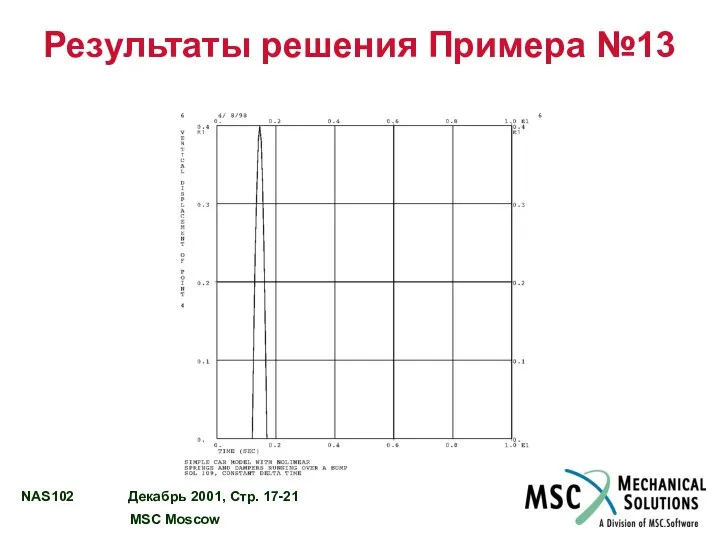
- 20. Результаты решения Примера №13
- 21. Результаты решения Примера №13
- 23. Скачать презентацию
Раздел 17. Внешние переменные, передаточные функции и элементы NOLIN
ВНЕШНИЕ ПЕРЕМЕННЫЕ..………………………………….………………………17 -
Раздел 17. Внешние переменные, передаточные функции и элементы NOLIN
ВНЕШНИЕ ПЕРЕМЕННЫЕ..………………………………….………………………17 -
Внешние переменные
Степени свободы, не связанные с конструкцией используются для представления не
Внешние переменные
Степени свободы, не связанные с конструкцией используются для представления не
Передаточные функции
Передаточные функции (ПФ) используются для задания динамических связей в форме:
где
Передаточные функции
Передаточные функции (ПФ) используются для задания динамических связей в форме:
где
Нелинейные силовые факторы
Нелинейные силовые факторы, прикладываемые к узлам
N(t) – нелинейная сила
Нелинейные силовые факторы
Нелинейные силовые факторы, прикладываемые к узлам
N(t) – нелинейная сила

Нелинейные силовые факторы
Нелинейные силы представляют отклонения от линейных зависимостей.
Наиболее просто используется
Нелинейные силовые факторы
Нелинейные силы представляют отклонения от линейных зависимостей.
Наиболее просто используется
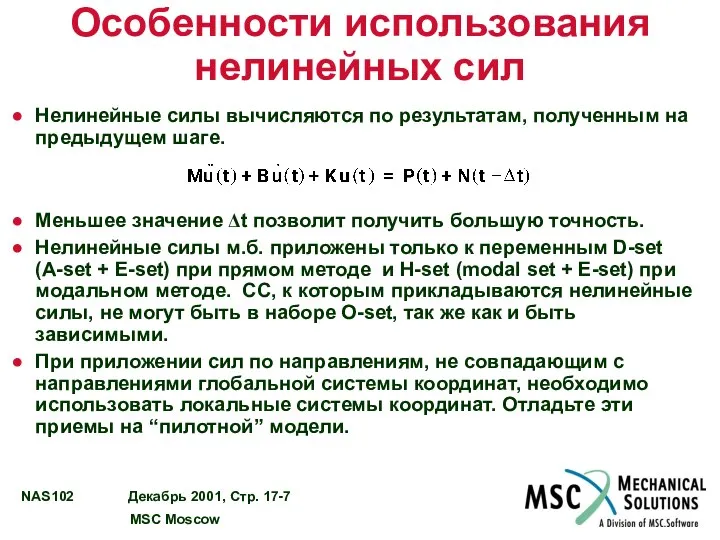
Особенности использования нелинейных сил
Нелинейные силы вычисляются по результатам, полученным на предыдущем
Особенности использования нелинейных сил
Нелинейные силы вычисляются по результатам, полученным на предыдущем
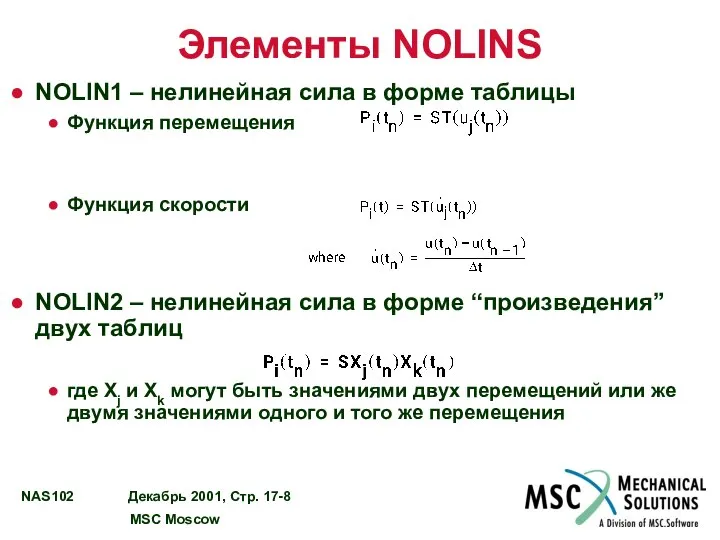
Элементы NOLINS
NOLIN1 – нелинейная сила в форме таблицы
Функция перемещения
Функция скорости
NOLIN2 –
Элементы NOLINS
NOLIN1 – нелинейная сила в форме таблицы
Функция перемещения
Функция скорости
NOLIN2 –
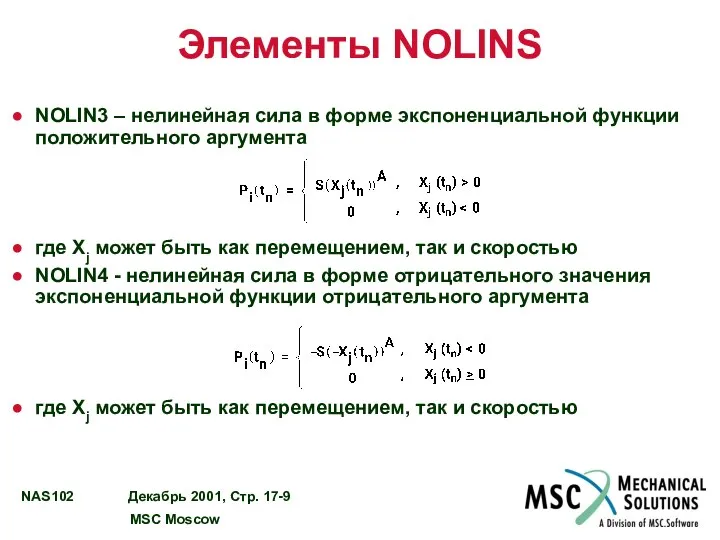
Элементы NOLINS
NOLIN3 – нелинейная сила в форме экспоненциальной функции положительного аргумента
где
Элементы NOLINS
NOLIN3 – нелинейная сила в форме экспоненциальной функции положительного аргумента
где

Пример №13
Нелинейный анализ переходного процесса с использованием элементов NOLIN
Пример №13
Нелинейный анализ переходного процесса с использованием элементов NOLIN
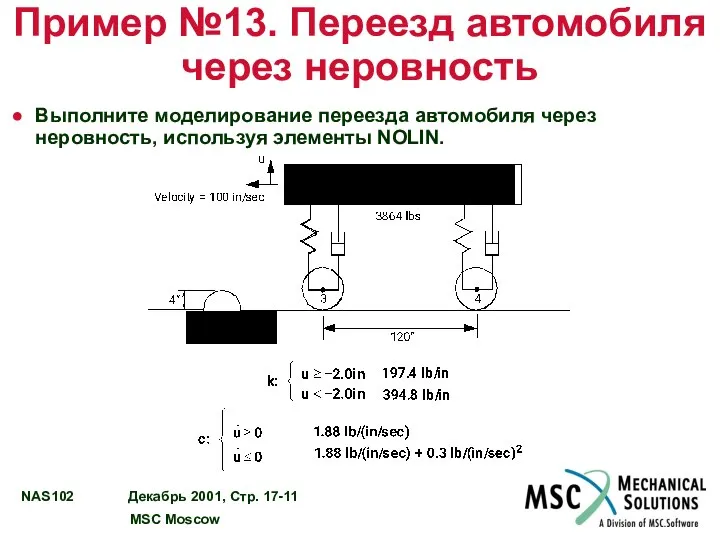
Пример №13. Переезд автомобиля через неровность
Выполните моделирование переезда автомобиля через неровность,
Пример №13. Переезд автомобиля через неровность
Выполните моделирование переезда автомобиля через неровность,
Пример №13. Переезд автомобиля через неровность
Пример №13. Переезд автомобиля через неровность
Входной файл для Примера №13
ID NAS102, WORKSHOP13
SOL 109
TIME 100
CEND
TITLE= SIMPLE
Входной файл для Примера №13
ID NAS102, WORKSHOP13 SOL 109 TIME 100 CEND TITLE= SIMPLE

Входной файл для Примера №13
$
$ CONSTRAINTS TO ELIMINATE RIGID-BODY MODES
$
SPC1, 100,
Входной файл для Примера №13
$ $ CONSTRAINTS TO ELIMINATE RIGID-BODY MODES $ SPC1, 100,

Результаты решения Примера №13
0 X Y - O U T P
Результаты решения Примера №13
0 X Y - O U T P
Результаты решения Примера №13
Результаты решения Примера №13
Результаты решения Примера №13
Результаты решения Примера №13
Результаты решения Примера №13
Результаты решения Примера №13
Результаты решения Примера №13
Результаты решения Примера №13
Результаты решения Примера №13
Результаты решения Примера №13
Результаты решения Примера №13
Результаты решения Примера №13
 Розробка web-сторінки кафедри інформаційних технологій
Розробка web-сторінки кафедри інформаційних технологій Програма Adobe Photoshop
Програма Adobe Photoshop Hegel and dialectics doing in software engineering
Hegel and dialectics doing in software engineering Базы данных в EXCEL
Базы данных в EXCEL Системы управления базами данных врача-специалиста. Проектирование базы данных. Лекция 2
Системы управления базами данных врача-специалиста. Проектирование базы данных. Лекция 2 Функции. Структура программы на СИ/СИ++
Функции. Структура программы на СИ/СИ++ Информационное общество
Информационное общество Реализация дистанционного образования на базе технологий RoWeb и ЛиК
Реализация дистанционного образования на базе технологий RoWeb и ЛиК Презентация "Введение в мультимедийные базы данных" - скачать презентации по Информатике
Презентация "Введение в мультимедийные базы данных" - скачать презентации по Информатике Разработка ИС по распределению производственных ресурсов
Разработка ИС по распределению производственных ресурсов Výpočetní technika a algoritmizace I. Úvod do předmětu
Výpočetní technika a algoritmizace I. Úvod do předmětu Федеральная служба государственной статистики Взаимодействие с различными категориями пользователей статистической информац
Федеральная служба государственной статистики Взаимодействие с различными категориями пользователей статистической информац Изменения в ГосИС 1.1.4.2 Импорт с ФТС
Изменения в ГосИС 1.1.4.2 Импорт с ФТС Понятие информации и общая характеристика процессов ее сбора, передачи, обработка и накопления
Понятие информации и общая характеристика процессов ее сбора, передачи, обработка и накопления Структура данных Scapegoat Tree
Структура данных Scapegoat Tree Презентация "Как образуются понятия" - скачать презентации по Информатике
Презентация "Как образуются понятия" - скачать презентации по Информатике Общие Сведения о языке Си
Общие Сведения о языке Си Управление и кибернетика. Управление с обратной связью
Управление и кибернетика. Управление с обратной связью Интернет, веб- страница, гиперссылка
Интернет, веб- страница, гиперссылка Этапы развития вычислительной техники
Этапы развития вычислительной техники Библиотечно–информационное обслуживание
Библиотечно–информационное обслуживание Ао Компания ТрансТелеКом. Коммутация
Ао Компания ТрансТелеКом. Коммутация Алгоритм автоматизированного вскрытия изменений на объектах ВВКК
Алгоритм автоматизированного вскрытия изменений на объектах ВВКК Тестирование Microsoft
Тестирование Microsoft SpaceShip
SpaceShip Ресурсы интернет Карушева Е.Н.
Ресурсы интернет Карушева Е.Н. Построение реляционной схемы из ER-диаграммы
Построение реляционной схемы из ER-диаграммы Программирование на языке Java. Тема 21. Статические методы
Программирование на языке Java. Тема 21. Статические методы