-
Раздел 2 Введение в теорию конечных элементов

Содержание
- 2. Введение в теорию конечных элементов Стр. Основная концепция метода перемещений 6 Интерпретация матрицы жесткости элементов [ke]
- 3. Введение в теорию конечных элементов (прод.) Стр. Некоторые советы по моделированию 54 Единицы измерения 56 Обзор
- 4. Введение в теорию конечных элементов (прод.) Стр. Матрица жесткости балочного (BAR) элемента 61 Элемент CBAR 63
- 5. Введение в теорию конечных элементов (прод.) Стр. Вывод перемещений для данного примера 94 Вывод сил в
- 6. Основная концепция метода перемещений Большинство конечноэлементных систем основываются на методе перемещений Каждый элемент модели может быть
- 7. Основная концепция метода перемещений (продолжение) где { P } = известные силы, прикладываемые к модели [
- 8. Интерпретация матрицы жесткости элемента [ke] [k]e описывает как сила передается через элемент Для упругих задач, закон
- 9. Интерпретация матрицы жесткости элемента [ke] (продолжение) Это естественно, поскольку для перемещения конца пружины 1 на заданное
- 10. Моделирование непрерывной конструкции конечными элементами Анализ сложных инженерных задач может быть затруднен (или даже невозможен) без
- 11. Моделирование непрерывной конструкции конечными элементами (продолжение) Каждая узловая точка имеет шесть независимых степеней свободы (DOFs). Степени
- 12. Моделирование непрерывной конструкции конечными элементами (продолжение) "Перемещение” (displacement) - основной термин означающий компонент перемещения или угла
- 13. Один элемент: осевое нагружение Рассмотрим упругий стержень (ROD) сечением A и длиной L под действием только
- 14. Один элемент: осевое нагружение (продолжение) Для этого ROD элемента, выражение 2-1 может быть представлено как: {
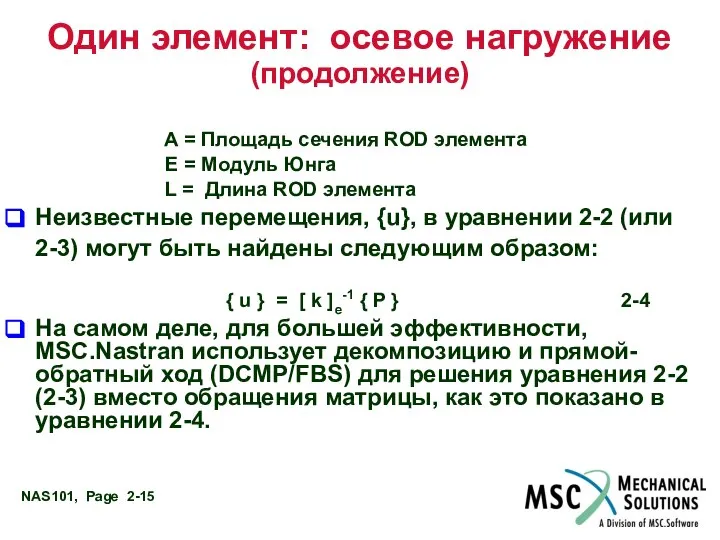
- 15. Один элемент: осевое нагружение (продолжение) A = Площадь сечения ROD элемента E = Модуль Юнга L
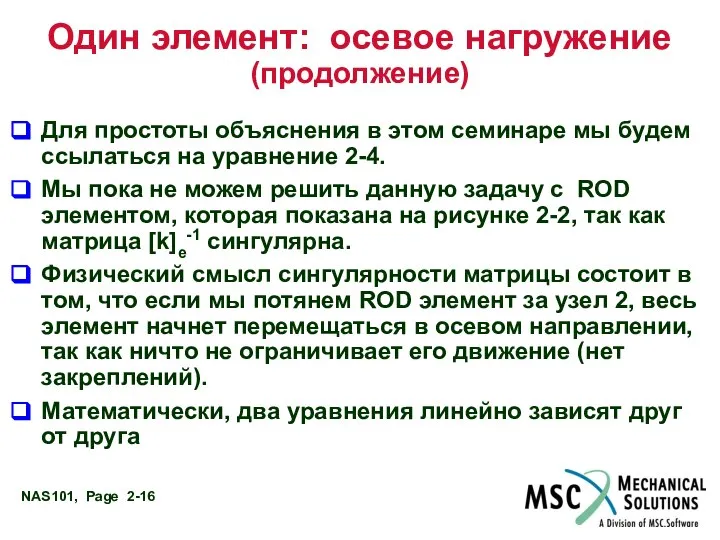
- 16. Один элемент: осевое нагружение (продолжение) Для простоты объяснения в этом семинаре мы будем ссылаться на уравнение
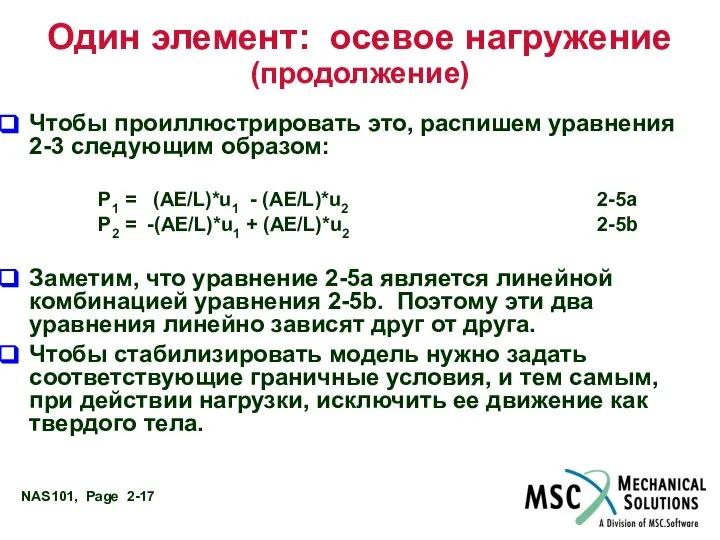
- 17. Один элемент: осевое нагружение (продолжение) Чтобы проиллюстрировать это, распишем уравнения 2-3 следующим образом: P1 = (AE/L)*u1
- 18. Один элемент: осевое нагружение (продолжение) Вернемся к рисунку с ROD элементом и закрепим его левый узел:
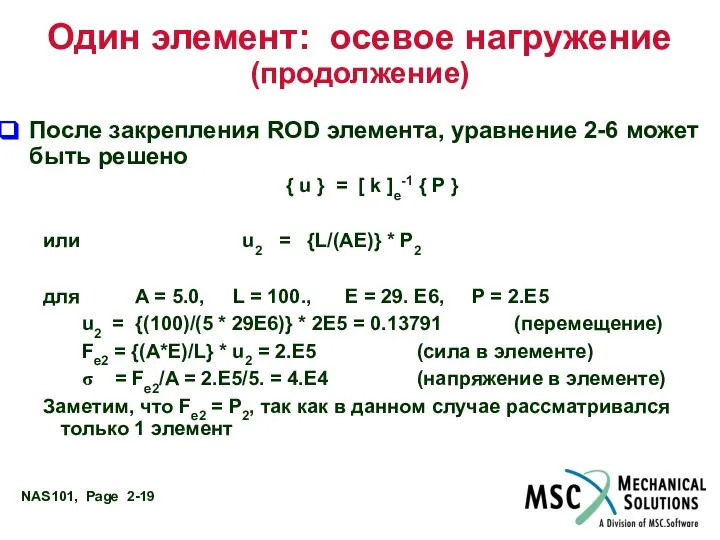
- 19. Один элемент: осевое нагружение (продолжение) После закрепления ROD элемента, уравнение 2-6 может быть решено { u
- 20. Общие требования к исходным данным Какие требования существуют для выполнения конечноэлементного анализа? Геометрия Расположение узловых точек
- 21. Общие требования к исходным данным (продолжение) Свойства материала Какой тип материала использовать: алюминий, сталь, графит, эпоксидная
- 22. Общие требования к исходным данным (продолжение) Нагрузки Приложенные нагрузки Принудительные перемещения Температурные нагрузки Нагрузки могут прикладываться
- 23. Исходные данные для примера с ROD элементом Какие общие требования существуют для расчета в системе MSC.Nastran?
- 24. Исходные данные для примера с ROD элементом (продолжение) Геометрия Определяется записью GRID Поле Содержимое Идентификационный номер
- 25. Исходные данные для примера с ROD элементом (продолжение) Какие общие требования существуют для расчета в системе
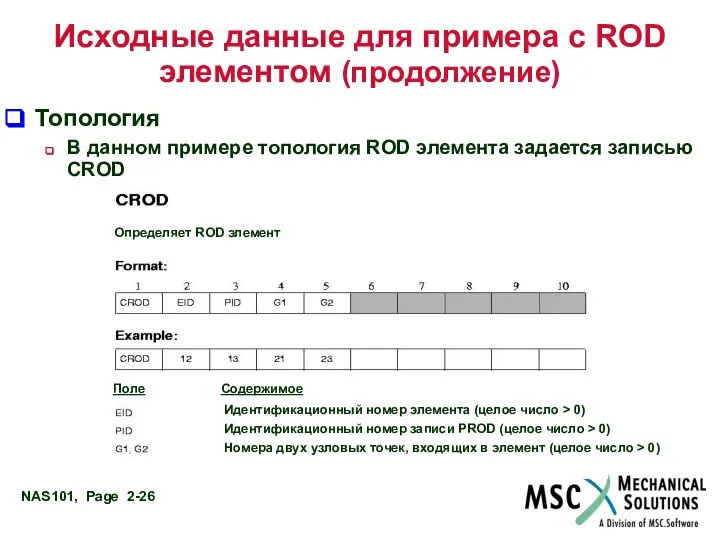
- 26. Исходные данные для примера с ROD элементом (продолжение) Топология В данном примере топология ROD элемента задается
- 27. Исходные данные для примера с ROD элементом (продолжение) Какие общие требования существуют для расчета в системе
- 28. Исходные данные для примера с ROD элементом (продолжение) Свойства элементов В данном примере свойства ROD элемента
- 29. Исходные данные для примера с ROD элементом (продолжение) Какие общие требования существуют для расчета в системе
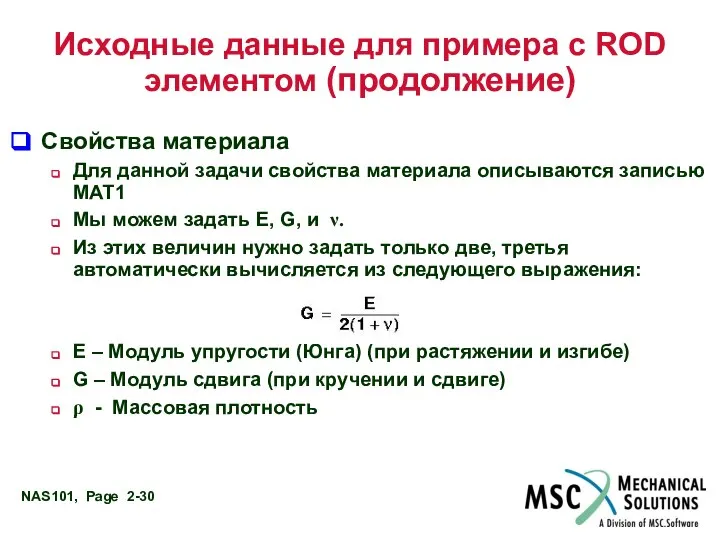
- 30. Исходные данные для примера с ROD элементом (продолжение) Свойства материала Для данной задачи свойства материала описываются
- 31. Исходные данные для примера с ROD элементом (продолжение) Свойства материала (продолжение) α - Коэффициент линейного температурного
- 32. Исходные данные для примера с ROD элементом (продолжение) Свойства материала (продолжение) Поле Содержимое Идентификационный номер материала
- 33. Исходные данные для примера с ROD элементом (продолжение) Какие общие требования существуют для расчета в системе
- 34. Исходные данные для примера с ROD элементом (продолжение) В MSC.Nastran граничные условия могут определяться с использованием
- 35. Исходные данные для примера с ROD элементом (продолжение) Какие общие требования существуют для расчета в системе
- 36. Исходные данные для примера с ROD элементом (продолжение) В данном примере будем использовать запись FORCE
- 37. Исходные данные для примера с ROD элементом (продолжение) где Поле Содержимое Номер варианта (set) нагрузки (целое
- 38. Исходные данные для примера с ROD элементом (продолжение) Для данного примера, Свойства элемента ( A =
- 39. Исходные данные для примера с ROD элементом (продолжение) В результате входной файл выглядит таким образом:
- 40. Исходные данные для примера с ROD элементом (продолжение) Какие общие требования существуют для расчета в системе
- 41. Исходные данные для примера с ROD элементом (продолжение) В данном примере в результате анализа мы хотим
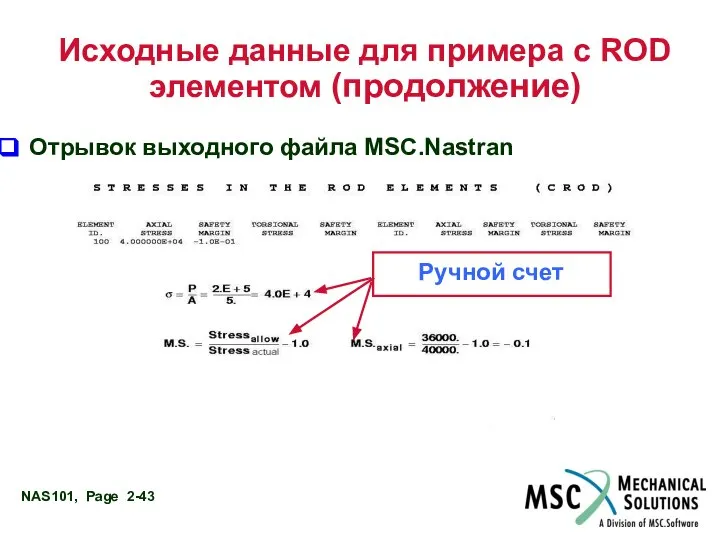
- 42. Исходные данные для примера с ROD элементом (продолжение) Отрывок выходного файла MSC.Nastran Hand Calculation Ручной счет
- 43. Исходные данные для примера с ROD элементом (продолжение) Отрывок выходного файла MSC.Nastran HAND CALCULATION Ручной счет
- 44. Глобальная матрица жесткости 1 2 3 ka kb U1 , P1 U3 , P3 U2 ,
- 45. Глобальная матрица жесткости (продолжение) Матрицы жесткости отдельных элементов с номерами 100 и 200 можно представить следующим
- 46. Глобальная матрица жесткости (продолжение) Глобальная матрица жесткости определяется суперпозицией матриц жесткости отдельных элементов Прямое определение матрицы
- 47. Глобальная матрица жесткости (продолжение) Собрав глобальную матрицу жесткости так, как показано в уравнении 2-7, можно затем
- 48. Процедура анализа сложной конструкции Процедура использованная для одного элемента и для двух элементов - может быть
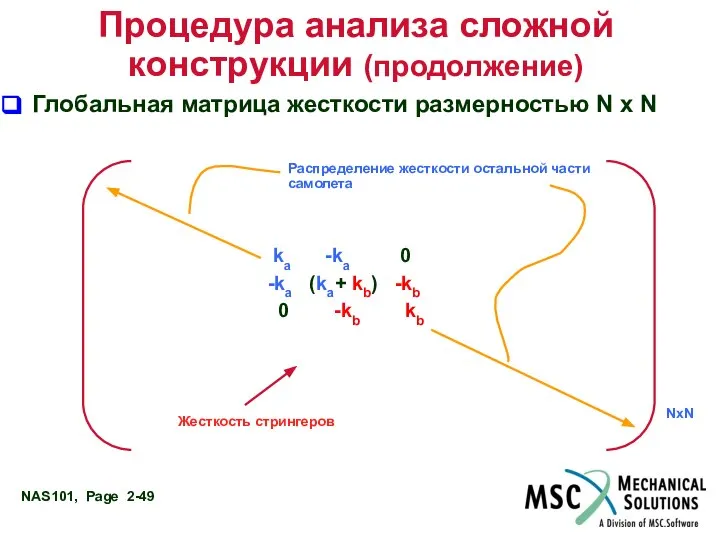
- 49. Процедура анализа сложной конструкции (продолжение) Глобальная матрица жесткости размерностью N x N ka -ka 0 -ka
- 50. Процедура анализа сложной конструкции (продолжение) Жесткостные характеристики остальной части самолета находятся составлением ансамбля из отдельных жесткостей
- 51. Процедура анализа сложной конструкции (продолжение) Ресурсы компьютера (время работы центрального процессора), используемые MSC.Nastran (при размерности модели
- 52. Выходные данные MSC.Nastran При запуске MSC.Nastran Вы можете запросить любую рассчитываемую величину. Вот некоторые из них:
- 53. Проверка модели Пользователь должен проверить точность результатов, полученных в результате анализа Некоторые виды проверки выполняются так:
- 54. Некоторые советы по моделированию Прежде чем начать моделирование необходимо иметь инженерное представление о поведении конструкции Определите
- 55. Некоторые советы по моделированию (продолжение) Обдумайте затраты компьютерных ресурсов - увеличение числа степеней свободы увеличивает загрузку
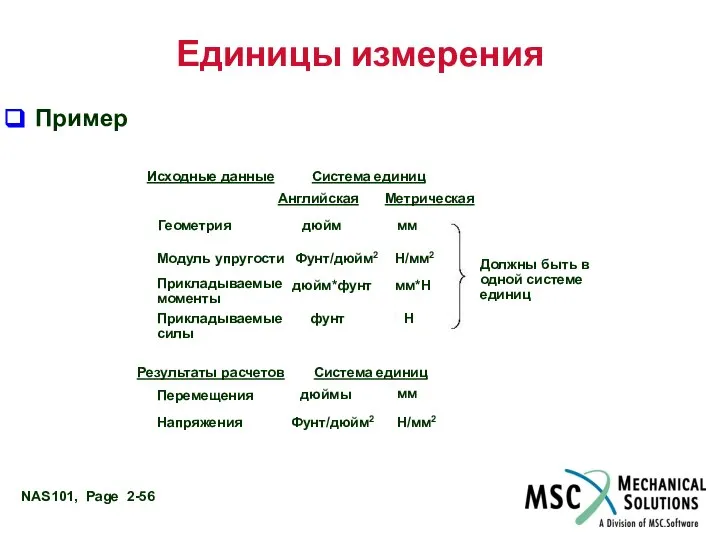
- 56. Единицы измерения Пример Исходные данные Система единиц Английская Метрическая Геометрия Модуль упругости Прикладываемые моменты Прикладываемые силы
- 57. Единицы измерения (продолжение) F = M a: масса (М) = вес / g Примечание: Для динамического
- 58. Обзор процедуры решения методом конечных элементов БЛОК-СХЕМА СТАТИЧЕСКОГО ЛИНЕЙНОГО АНАЛИЗА Представление непрерывной среды, исследуемой конструкции, как
- 59. Литература по матричному анализу
- 60. Литература по МКЭ
- 61. Матрица жесткости балочного (BAR) элемента Рассмотрим матрицу жесткости BAR элемента. В качестве иллюстрации рассмотрим нагружение перерезывающей
- 62. Матрица жесткости балочного (BAR) элемента (продолжение) Матрица жесткости для BAR элемента для двухмерной модели, включающей только
- 63. Элемент CBAR Соединяет две узловые точки. Формулировки получены из классической балочной теории (плоские сечения остаются плоскими
- 64. Элемент CBAR (продолжение) Компоненты перемещения ui θi Нейтральная ось может иметь отступ относительно узловых точек (создается
- 65. Элемент CBAR (продолжение) Принципиальные ограничения (продолжение) Центр сдвига и нейтральная ось должны совпадать (поэтому не рекомендуется
- 66. Описание CBAR элемента Топология CBAR элемента Геометрия Карта продолжения Поле Содержимое Идентификационный номер элемента Идентификационный номер
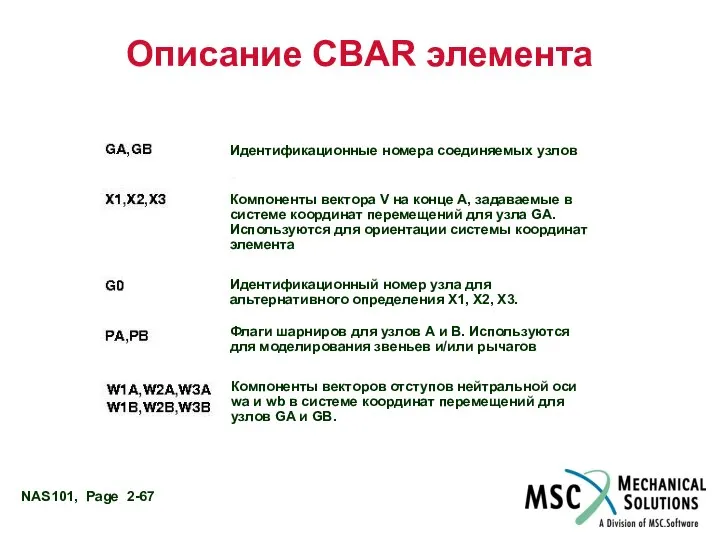
- 67. Описание CBAR элемента Идентификационные номера соединяемых узлов Компоненты вектора V на конце А, задаваемые в системе
- 68. Описание CBAR элемента (продолжение) Система координат CBAR элемента Определяется пользователем путем задания вектора V Ориентирует свойства
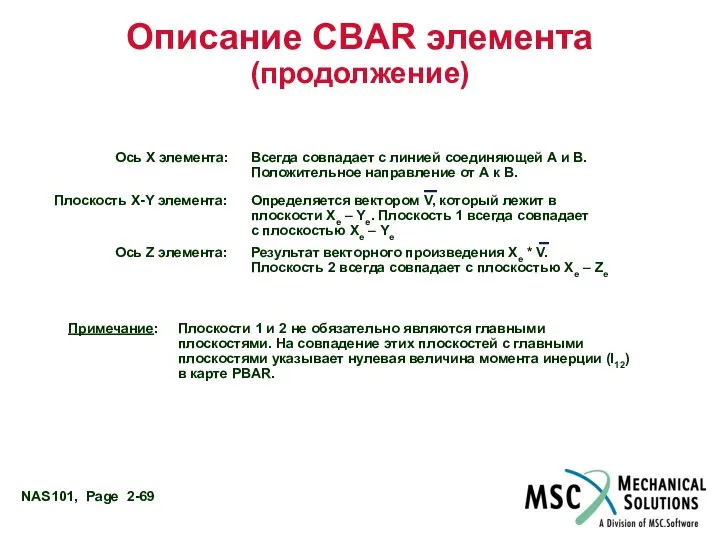
- 69. Описание CBAR элемента (продолжение) Ось Х элемента: Плоскость Х-Y элемента: Ось Z элемента: Всегда совпадает с
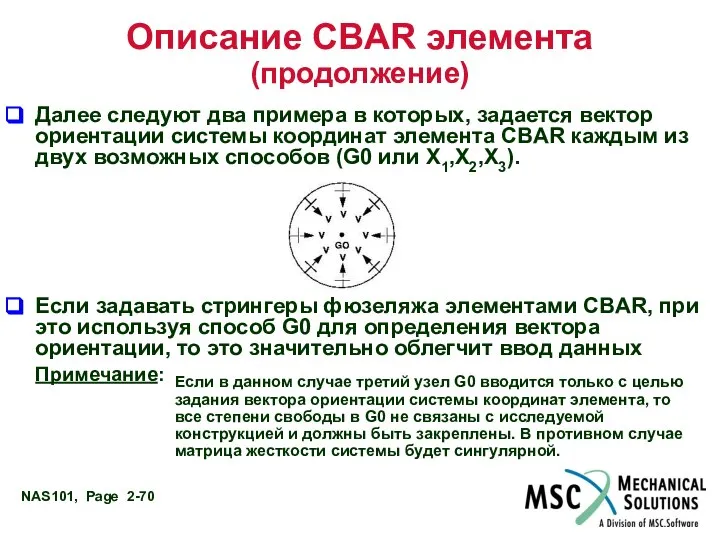
- 70. Описание CBAR элемента (продолжение) Далее следуют два примера в которых, задается вектор ориентации системы координат элемента
- 71. Описание CBAR элемента (продолжение) Для определения ориентации ножек треножника, моделируемого элементами CBAR, как показано, будет более
- 72. Описание CBAR элемента (продолжение) Смещения: Концы элемента CBAR могут быть смещены относительно узлов (GA, GB) посредством
- 73. Описание CBAR элемента (продолжение) Флаги шарниров: Пользователь указывает степени свободы на каждом из концов BAR элемента
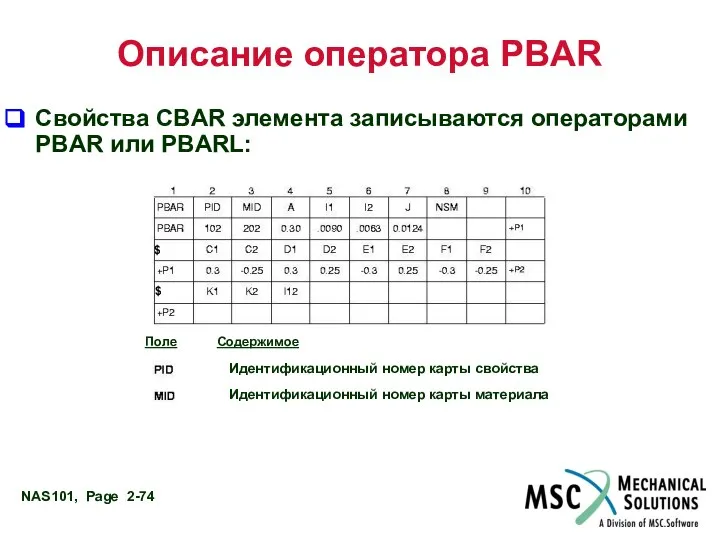
- 74. Описание оператора PBAR Свойства CBAR элемента записываются операторами PBAR или PBARL: $ $ Поле Содержимое Идентификационный
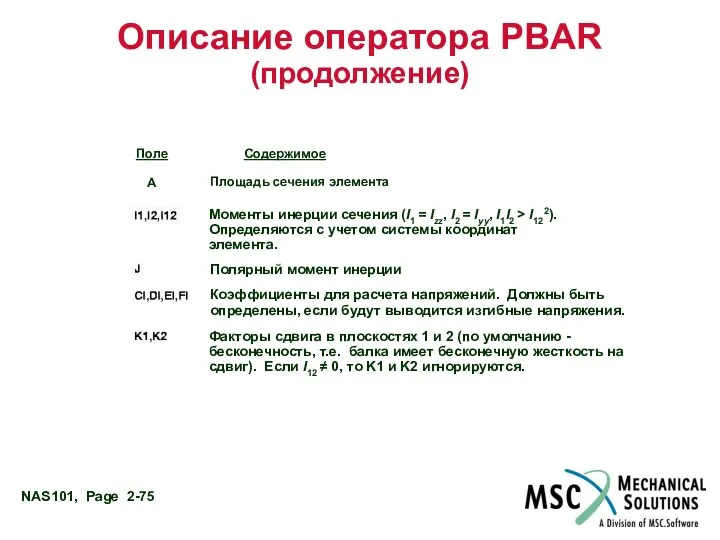
- 75. Описание оператора PBAR (продолжение) Field Contents Поле Содержимое А Площадь сечения элемента Моменты инерции сечения (I1
- 76. Расчет моментов инерции J для некоторых сечений КРУГ КОЛЬЦЕВОЕ СЕЧЕНИЕ КВАДРАТ
- 77. Расчет моментов инерции J для некоторых сечений (продолжение) ПРЯМОУГОЛЬНОЕ СЕЧЕНИЕ Формулы для других не круговых сечений
- 78. Поперечный сдвиг Сдвиговые перемещения балки - V, рассчитываются по формуле V = ( Fz * L
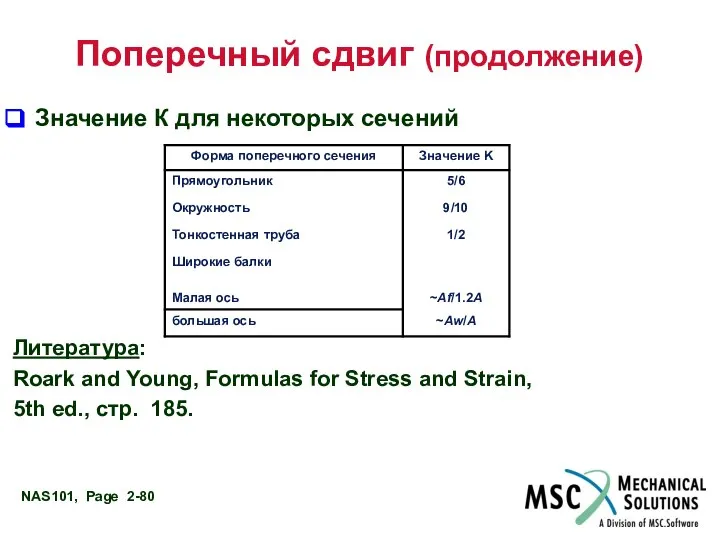
- 79. Поперечный сдвиг (продолжение) K определяет распределение сдвига по сечению элемента и ее величина зависит от формы
- 80. Поперечный сдвиг (продолжение) Значение К для некоторых сечений Литература: Roark and Young, Formulas for Stress and
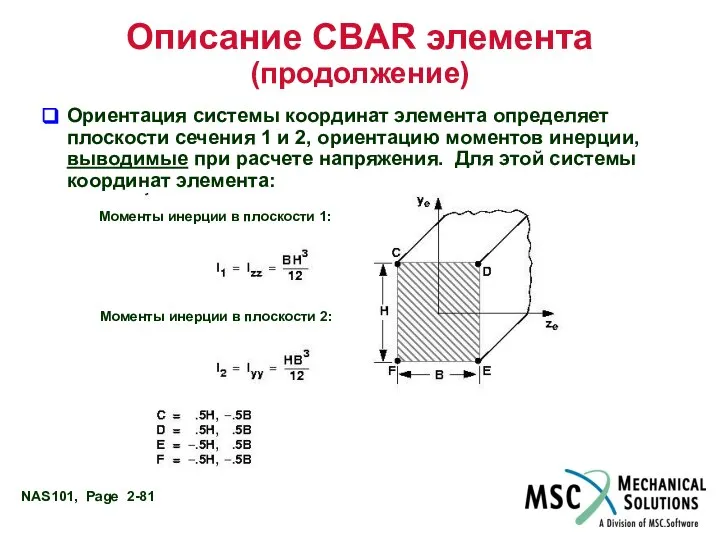
- 81. Описание CBAR элемента (продолжение) Ориентация системы координат элемента определяет плоскости сечения 1 и 2, ориентацию моментов
- 82. Описание CBAR элемента (продолжение) Для такой системы координат элемента:
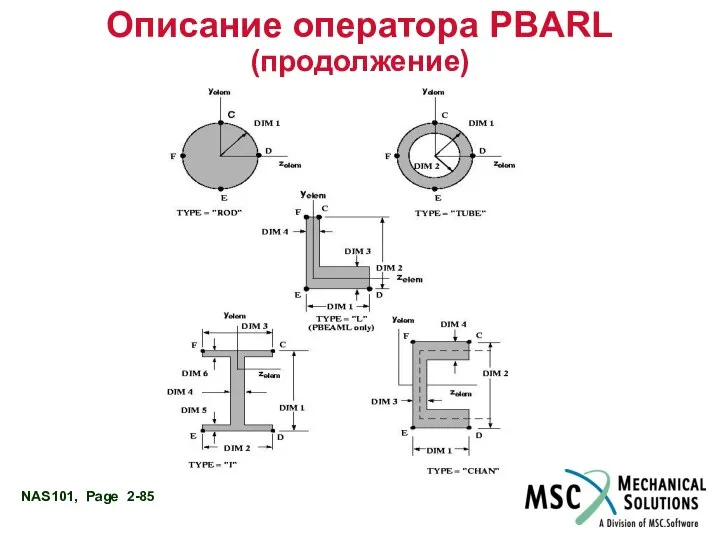
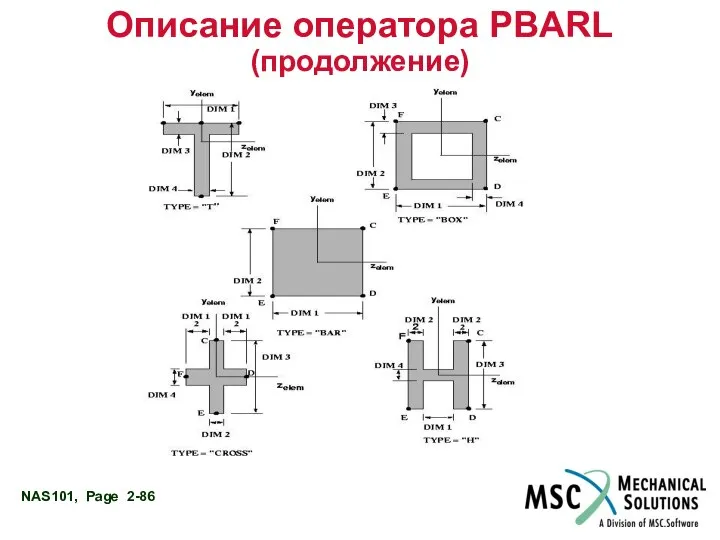
- 83. Описание оператора PBARL Формат записи PBARL: Пример:
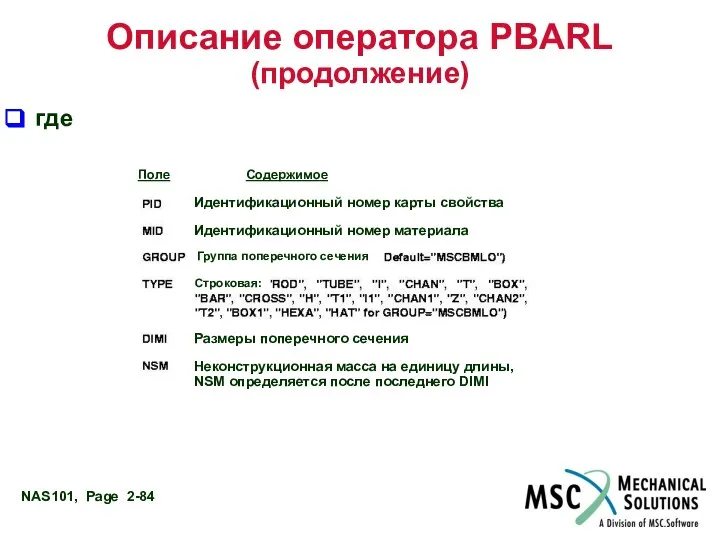
- 84. Описание оператора PBARL (продолжение) где Поле Содержимое Идентификационный номер карты свойства Идентификационный номер материала Группа поперечного
- 85. Описание оператора PBARL (продолжение)
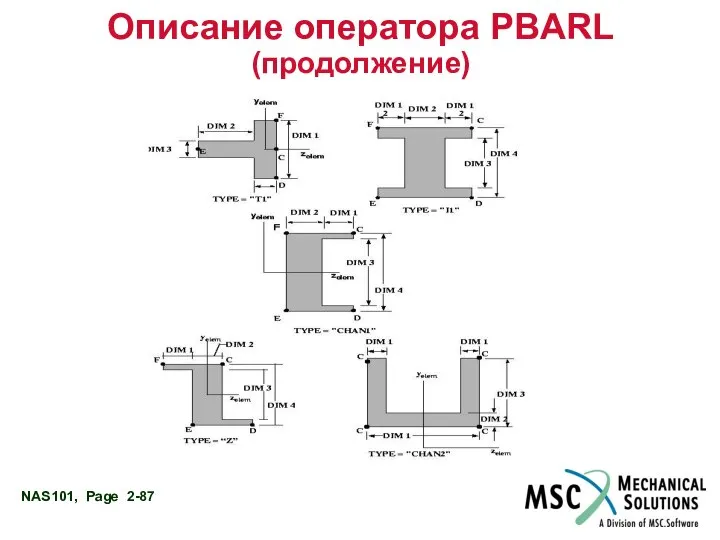
- 86. Описание оператора PBARL (продолжение)
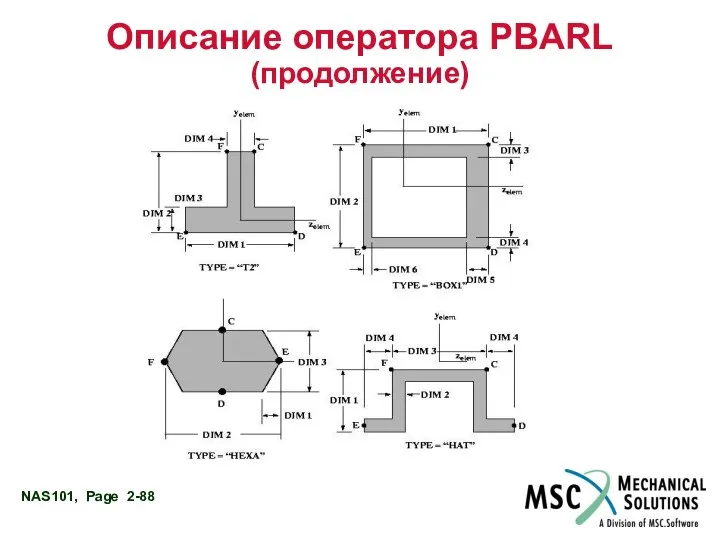
- 87. Описание оператора PBARL (продолжение)
- 88. Описание оператора PBARL (продолжение)
- 89. Силы в балочном элементе Внутренние силы и моменты элемента BAR: Плоскость 1 Плоскость 2
- 90. Силы в балочном элементе (продолжение) Это можно также представить как: Плоскость 1 Плоскость 2
- 91. Пример применения CBAR элемента Пример: Приложенная нагрузка
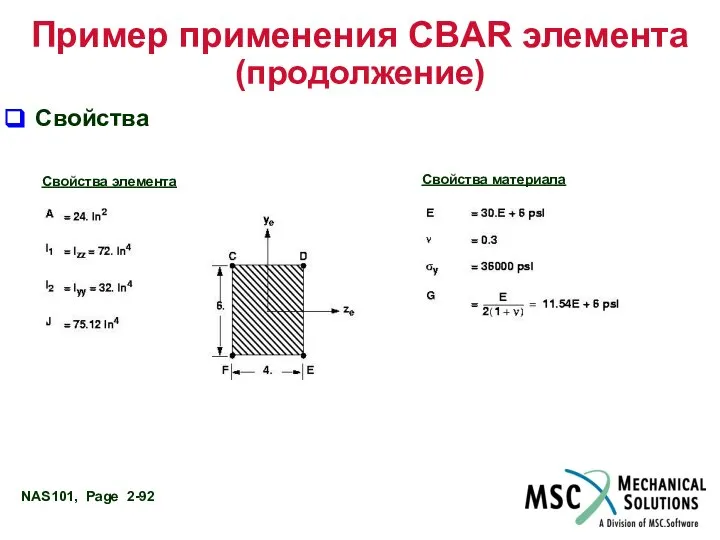
- 92. Пример применения CBAR элемента (продолжение) Свойства Свойства элемента Свойства материала
- 93. Входной файл MSC.Nastran для данного примера
- 94. Вывод перемещений для данного примера
- 95. Вывод сил в элементах для данного примера Сдвиг Момент
- 97. Скачать презентацию

Введение в теорию конечных элементов
Стр.
Основная концепция метода перемещений 6
Интерпретация матрицы
Введение в теорию конечных элементов
Стр.
Основная концепция метода перемещений 6
Интерпретация матрицы

Введение в теорию конечных элементов (прод.)
Стр.
Некоторые советы по моделированию 54
Единицы
Введение в теорию конечных элементов (прод.)
Стр.
Некоторые советы по моделированию 54
Единицы
Введение в теорию конечных элементов (прод.)
Стр.
Матрица жесткости балочного (BAR) элемента
Введение в теорию конечных элементов (прод.)
Стр.
Матрица жесткости балочного (BAR) элемента
Введение в теорию конечных элементов (прод.)
Стр.
Вывод перемещений для данного примера
Введение в теорию конечных элементов (прод.)
Стр.
Вывод перемещений для данного примера
Основная концепция метода перемещений
Большинство конечноэлементных систем основываются на методе перемещений
Каждый элемент
Основная концепция метода перемещений
Большинство конечноэлементных систем основываются на методе перемещений
Каждый элемент
Основная концепция метода перемещений (продолжение)
где { P } = известные силы,
Основная концепция метода перемещений (продолжение)
где { P } = известные силы,
![Интерпретация матрицы жесткости элемента [ke] [k]e описывает как сила передается через](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1278586/slide-7.jpg)
Интерпретация матрицы жесткости элемента [ke]
[k]e описывает как сила передается через
Интерпретация матрицы жесткости элемента [ke]
[k]e описывает как сила передается через
![Интерпретация матрицы жесткости элемента [ke] (продолжение) Это естественно, поскольку для перемещения](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1278586/slide-8.jpg)
Интерпретация матрицы жесткости элемента [ke] (продолжение)
Это естественно, поскольку для перемещения конца
Интерпретация матрицы жесткости элемента [ke] (продолжение)
Это естественно, поскольку для перемещения конца
Моделирование непрерывной конструкции конечными элементами
Анализ сложных инженерных задач может быть
Моделирование непрерывной конструкции конечными элементами
Анализ сложных инженерных задач может быть
Моделирование непрерывной конструкции конечными элементами (продолжение)
Каждая узловая точка имеет шесть независимых
Моделирование непрерывной конструкции конечными элементами (продолжение)
Каждая узловая точка имеет шесть независимых

Моделирование непрерывной конструкции конечными элементами (продолжение)
"Перемещение” (displacement) - основной термин означающий
Моделирование непрерывной конструкции конечными элементами (продолжение)
"Перемещение” (displacement) - основной термин означающий
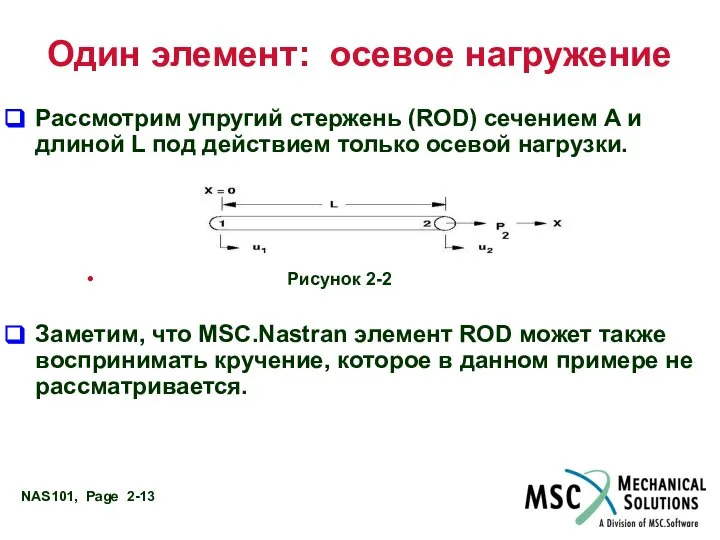
Один элемент: осевое нагружение
Рассмотрим упругий стержень (ROD) сечением A и длиной
Один элемент: осевое нагружение
Рассмотрим упругий стержень (ROD) сечением A и длиной
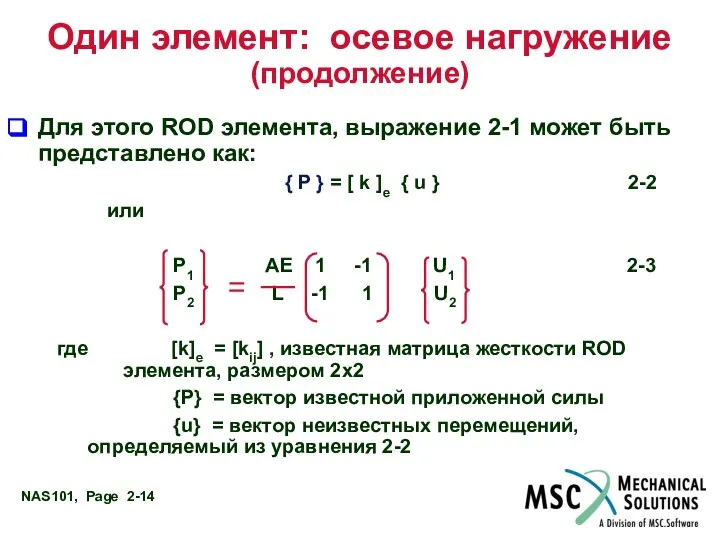
Один элемент: осевое нагружение
(продолжение)
Для этого ROD элемента, выражение 2-1 может
Один элемент: осевое нагружение
(продолжение)
Для этого ROD элемента, выражение 2-1 может
Один элемент: осевое нагружение
(продолжение)
A = Площадь сечения ROD элемента
Один элемент: осевое нагружение
(продолжение)
A = Площадь сечения ROD элемента
Один элемент: осевое нагружение
(продолжение)
Для простоты объяснения в этом семинаре мы
Один элемент: осевое нагружение
(продолжение)
Для простоты объяснения в этом семинаре мы
Один элемент: осевое нагружение
(продолжение)
Чтобы проиллюстрировать это, распишем уравнения 2-3 следующим
Один элемент: осевое нагружение
(продолжение)
Чтобы проиллюстрировать это, распишем уравнения 2-3 следующим

Один элемент: осевое нагружение
(продолжение)
Вернемся к рисунку с ROD элементом и
Один элемент: осевое нагружение
(продолжение)
Вернемся к рисунку с ROD элементом и
Один элемент: осевое нагружение
(продолжение)
После закрепления ROD элемента, уравнение 2-6 может
Один элемент: осевое нагружение
(продолжение)
После закрепления ROD элемента, уравнение 2-6 может
Общие требования к исходным данным
Какие требования существуют для выполнения конечноэлементного анализа?
Геометрия
Расположение
Общие требования к исходным данным
Какие требования существуют для выполнения конечноэлементного анализа?
Геометрия
Расположение

Общие требования к исходным данным (продолжение)
Свойства материала
Какой тип материала использовать:
Общие требования к исходным данным (продолжение)
Свойства материала
Какой тип материала использовать:

Общие требования к исходным данным (продолжение)
Нагрузки
Приложенные нагрузки
Принудительные перемещения
Температурные нагрузки
Нагрузки могут прикладываться
Общие требования к исходным данным (продолжение)
Нагрузки
Приложенные нагрузки
Принудительные перемещения
Температурные нагрузки
Нагрузки могут прикладываться
Исходные данные для примера с ROD элементом
Какие общие требования существуют для
Исходные данные для примера с ROD элементом
Какие общие требования существуют для
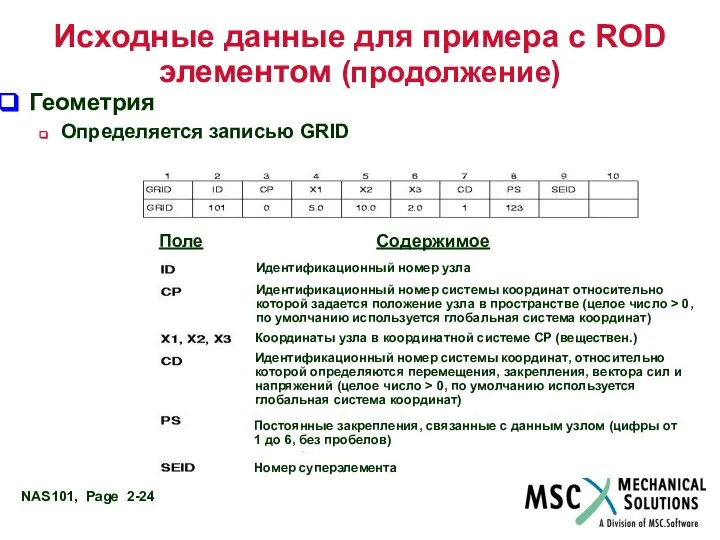
Исходные данные для примера с ROD элементом (продолжение)
Геометрия
Определяется записью GRID
Поле
Содержимое
Идентификационный номер
Исходные данные для примера с ROD элементом (продолжение)
Геометрия
Определяется записью GRID
Поле
Содержимое
Идентификационный номер
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
Топология
В данном примере топология
Исходные данные для примера с ROD элементом (продолжение)
Топология
В данном примере топология
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют

Исходные данные для примера с ROD элементом (продолжение)
Свойства элементов
В данном примере
Исходные данные для примера с ROD элементом (продолжение)
Свойства элементов
В данном примере
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
Свойства материала
Для данной задачи
Исходные данные для примера с ROD элементом (продолжение)
Свойства материала
Для данной задачи
Исходные данные для примера с ROD элементом (продолжение)
Свойства материала (продолжение)
α -
Исходные данные для примера с ROD элементом (продолжение)
Свойства материала (продолжение)
α -

Исходные данные для примера с ROD элементом (продолжение)
Свойства материала (продолжение)
Поле Содержимое
Идентификационный номер
Исходные данные для примера с ROD элементом (продолжение)
Свойства материала (продолжение)
Поле Содержимое
Идентификационный номер
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
В MSC.Nastran граничные условия
Исходные данные для примера с ROD элементом (продолжение)
В MSC.Nastran граничные условия
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
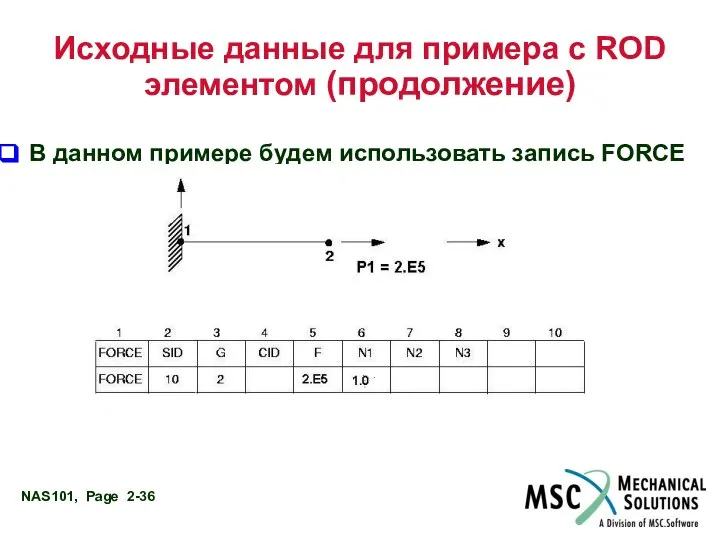
Исходные данные для примера с ROD элементом (продолжение)
В данном примере будем
Исходные данные для примера с ROD элементом (продолжение)
В данном примере будем
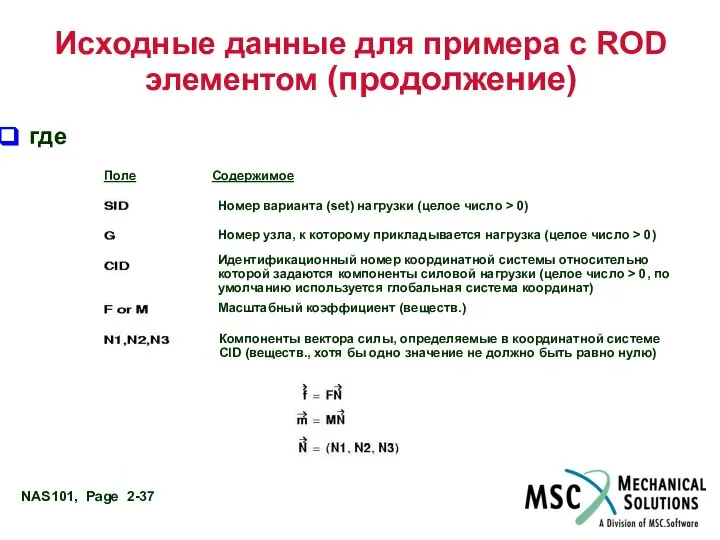
Исходные данные для примера с ROD элементом (продолжение)
где
Поле Содержимое
Номер варианта (set) нагрузки
Исходные данные для примера с ROD элементом (продолжение)
где
Поле Содержимое
Номер варианта (set) нагрузки

Исходные данные для примера с ROD элементом (продолжение)
Для данного примера,
Свойства элемента
Исходные данные для примера с ROD элементом (продолжение)
Для данного примера,
Свойства элемента
Исходные данные для примера с ROD элементом (продолжение)
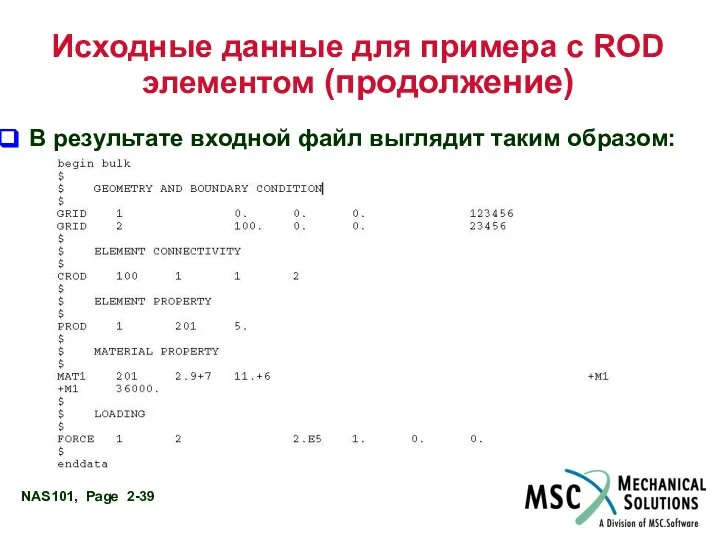
В результате входной файл
Исходные данные для примера с ROD элементом (продолжение)
В результате входной файл
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
В данном примере в
Исходные данные для примера с ROD элементом (продолжение)
В данном примере в

Исходные данные для примера с ROD элементом (продолжение)
Отрывок выходного файла MSC.Nastran
Hand
Исходные данные для примера с ROD элементом (продолжение)
Отрывок выходного файла MSC.Nastran
Hand
Исходные данные для примера с ROD элементом (продолжение)
Отрывок выходного файла MSC.Nastran
HAND
Исходные данные для примера с ROD элементом (продолжение)
Отрывок выходного файла MSC.Nastran
HAND

Глобальная матрица жесткости
1
2
3
ka
kb
U1 , P1
U3 , P3
U2 , P2
До этого рассматривалась
Глобальная матрица жесткости
1
2
3
ka
kb
U1 , P1
U3 , P3
U2 , P2
До этого рассматривалась

Глобальная матрица жесткости
(продолжение)
Матрицы жесткости отдельных элементов с номерами 100 и 200
Глобальная матрица жесткости
(продолжение)
Матрицы жесткости отдельных элементов с номерами 100 и 200
Глобальная матрица жесткости
(продолжение)
Глобальная матрица жесткости определяется суперпозицией матриц жесткости отдельных элементов
Прямое
Глобальная матрица жесткости
(продолжение)
Глобальная матрица жесткости определяется суперпозицией матриц жесткости отдельных элементов
Прямое
Глобальная матрица жесткости
(продолжение)
Собрав глобальную матрицу жесткости так, как показано в уравнении
Глобальная матрица жесткости
(продолжение)
Собрав глобальную матрицу жесткости так, как показано в уравнении

Процедура анализа сложной конструкции
Процедура использованная для одного элемента и для двух
Процедура анализа сложной конструкции
Процедура использованная для одного элемента и для двух
Процедура анализа сложной конструкции (продолжение)
Глобальная матрица жесткости размерностью N x N
ka
Процедура анализа сложной конструкции (продолжение)
Глобальная матрица жесткости размерностью N x N
ka
Процедура анализа сложной конструкции (продолжение)
Жесткостные характеристики остальной части самолета находятся составлением
Процедура анализа сложной конструкции (продолжение)
Жесткостные характеристики остальной части самолета находятся составлением
Процедура анализа сложной конструкции (продолжение)
Ресурсы компьютера (время работы центрального процессора), используемые
Процедура анализа сложной конструкции (продолжение)
Ресурсы компьютера (время работы центрального процессора), используемые

Выходные данные MSC.Nastran
При запуске MSC.Nastran Вы можете запросить любую рассчитываемую величину.
Выходные данные MSC.Nastran
При запуске MSC.Nastran Вы можете запросить любую рассчитываемую величину.
Проверка модели
Пользователь должен проверить точность результатов, полученных в результате анализа
Некоторые виды
Проверка модели
Пользователь должен проверить точность результатов, полученных в результате анализа
Некоторые виды

Некоторые советы по моделированию
Прежде чем начать моделирование необходимо иметь инженерное представление
Некоторые советы по моделированию
Прежде чем начать моделирование необходимо иметь инженерное представление
Некоторые советы по моделированию (продолжение)
Обдумайте затраты компьютерных ресурсов - увеличение числа
Некоторые советы по моделированию (продолжение)
Обдумайте затраты компьютерных ресурсов - увеличение числа
Единицы измерения
Пример
Исходные данные
Система единиц
Английская
Метрическая
Геометрия
Модуль упругости
Прикладываемые моменты
Прикладываемые силы
дюйм
дюйм*фунт
мм
Фунт/дюйм2
Н/мм2
мм*Н
фунт
Н
Должны быть в одной системе
Единицы измерения
Пример
Исходные данные
Система единиц
Английская
Метрическая
Геометрия
Модуль упругости
Прикладываемые моменты
Прикладываемые силы
дюйм
дюйм*фунт
мм
Фунт/дюйм2
Н/мм2
мм*Н
фунт
Н
Должны быть в одной системе

Единицы измерения
(продолжение)
F = M a: масса (М) = вес / g
Примечание:
Единицы измерения
(продолжение)
F = M a: масса (М) = вес / g
Примечание:

Обзор процедуры решения методом конечных элементов
БЛОК-СХЕМА СТАТИЧЕСКОГО ЛИНЕЙНОГО АНАЛИЗА
Представление
Обзор процедуры решения методом конечных элементов
БЛОК-СХЕМА СТАТИЧЕСКОГО ЛИНЕЙНОГО АНАЛИЗА
Представление
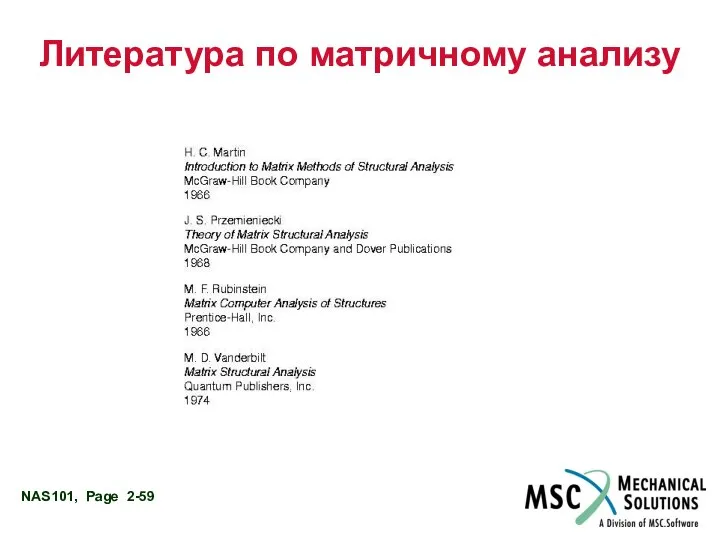
Литература по матричному анализу
Литература по матричному анализу

Литература по МКЭ
Литература по МКЭ

Матрица жесткости балочного (BAR) элемента
Рассмотрим матрицу жесткости BAR элемента.
В качестве
Матрица жесткости балочного (BAR) элемента
Рассмотрим матрицу жесткости BAR элемента.
В качестве

Матрица жесткости балочного (BAR) элемента (продолжение)
Матрица жесткости для BAR элемента для
Матрица жесткости балочного (BAR) элемента (продолжение)
Матрица жесткости для BAR элемента для
Элемент CBAR
Соединяет две узловые точки.
Формулировки получены из классической балочной теории
Элемент CBAR
Соединяет две узловые точки.
Формулировки получены из классической балочной теории

Элемент CBAR (продолжение)
Компоненты перемещения
ui
θi
Нейтральная ось может иметь отступ относительно узловых точек
Элемент CBAR (продолжение)
Компоненты перемещения
ui
θi
Нейтральная ось может иметь отступ относительно узловых точек
Элемент CBAR (продолжение)
Принципиальные ограничения (продолжение)
Центр сдвига и нейтральная ось должны совпадать
Элемент CBAR (продолжение)
Принципиальные ограничения (продолжение)
Центр сдвига и нейтральная ось должны совпадать

Описание CBAR элемента
Топология CBAR элемента
Геометрия
Карта продолжения
Поле
Содержимое
Идентификационный номер элемента
Идентификационный номер элемента
Идентификационный номер
Описание CBAR элемента
Топология CBAR элемента
Геометрия
Карта продолжения
Поле
Содержимое
Идентификационный номер элемента
Идентификационный номер элемента
Идентификационный номер
Описание CBAR элемента
Идентификационные номера соединяемых узлов
Компоненты вектора V на конце А,
Описание CBAR элемента
Идентификационные номера соединяемых узлов
Компоненты вектора V на конце А,

Описание CBAR элемента (продолжение)
Система координат CBAR элемента
Определяется пользователем путем задания вектора
Описание CBAR элемента (продолжение)
Система координат CBAR элемента
Определяется пользователем путем задания вектора
Описание CBAR элемента (продолжение)
Ось Х элемента:
Плоскость Х-Y элемента:
Ось Z элемента:
Всегда совпадает
Описание CBAR элемента (продолжение)
Ось Х элемента:
Плоскость Х-Y элемента:
Ось Z элемента:
Всегда совпадает
Описание CBAR элемента (продолжение)
Далее следуют два примера в которых, задается вектор
Описание CBAR элемента (продолжение)
Далее следуют два примера в которых, задается вектор

Описание CBAR элемента (продолжение)
Для определения ориентации ножек треножника, моделируемого элементами CBAR,
Описание CBAR элемента (продолжение)
Для определения ориентации ножек треножника, моделируемого элементами CBAR,

Описание CBAR элемента (продолжение)
Смещения:
Концы элемента CBAR могут быть смещены относительно узлов
Описание CBAR элемента (продолжение)
Смещения:
Концы элемента CBAR могут быть смещены относительно узлов
Описание CBAR элемента (продолжение)
Флаги шарниров:
Пользователь указывает степени свободы на каждом из
Описание CBAR элемента (продолжение)
Флаги шарниров:
Пользователь указывает степени свободы на каждом из
Описание оператора PBAR
Свойства CBAR элемента записываются операторами PBAR или PBARL:
$
$
Поле Содержимое
Идентификационный номер
Описание оператора PBAR
Свойства CBAR элемента записываются операторами PBAR или PBARL:
$
$
Поле Содержимое
Идентификационный номер
Описание оператора PBAR
(продолжение)
Field
Contents
Поле Содержимое
А
Площадь сечения элемента
Моменты инерции сечения (I1 =
Описание оператора PBAR
(продолжение)
Field
Contents
Поле Содержимое
А
Площадь сечения элемента
Моменты инерции сечения (I1 =

Расчет моментов инерции J для некоторых сечений
КРУГ
КОЛЬЦЕВОЕ СЕЧЕНИЕ
КВАДРАТ
Расчет моментов инерции J для некоторых сечений
КРУГ
КОЛЬЦЕВОЕ СЕЧЕНИЕ
КВАДРАТ

Расчет моментов инерции J для некоторых сечений (продолжение)
ПРЯМОУГОЛЬНОЕ СЕЧЕНИЕ
Формулы для других
Расчет моментов инерции J для некоторых сечений (продолжение)
ПРЯМОУГОЛЬНОЕ СЕЧЕНИЕ
Формулы для других

Поперечный сдвиг
Сдвиговые перемещения балки - V, рассчитываются по формуле
V =
Поперечный сдвиг
Сдвиговые перемещения балки - V, рассчитываются по формуле
V =
Поперечный сдвиг (продолжение)
K определяет распределение сдвига по сечению элемента и ее
Поперечный сдвиг (продолжение)
K определяет распределение сдвига по сечению элемента и ее
Поперечный сдвиг (продолжение)
Значение К для некоторых сечений
Литература:
Roark and Young, Formulas
Поперечный сдвиг (продолжение)
Значение К для некоторых сечений
Литература:
Roark and Young, Formulas
Описание CBAR элемента (продолжение)
Ориентация системы координат элемента определяет плоскости сечения 1
Описание CBAR элемента (продолжение)
Ориентация системы координат элемента определяет плоскости сечения 1

Описание CBAR элемента (продолжение)
Для такой системы координат элемента:
Описание CBAR элемента (продолжение)
Для такой системы координат элемента:

Описание оператора PBARL
Формат записи PBARL:
Пример:
Описание оператора PBARL
Формат записи PBARL:
Пример:
Описание оператора PBARL (продолжение)
где
Поле Содержимое
Идентификационный номер карты свойства
Идентификационный номер материала
Группа поперечного сечения
Строковая:
Размеры
Описание оператора PBARL (продолжение)
где
Поле Содержимое
Идентификационный номер карты свойства
Идентификационный номер материала
Группа поперечного сечения
Строковая:
Размеры
Описание оператора PBARL (продолжение)
Описание оператора PBARL (продолжение)
Описание оператора PBARL (продолжение)
Описание оператора PBARL (продолжение)
Описание оператора PBARL (продолжение)
Описание оператора PBARL (продолжение)
Описание оператора PBARL (продолжение)
Описание оператора PBARL (продолжение)

Силы в балочном элементе
Внутренние силы и моменты элемента BAR:
Плоскость 1
Плоскость 2
Силы в балочном элементе
Внутренние силы и моменты элемента BAR:
Плоскость 1
Плоскость 2

Силы в балочном элементе (продолжение)
Это можно также представить как:
Плоскость 1
Плоскость 2
Силы в балочном элементе (продолжение)
Это можно также представить как:
Плоскость 1
Плоскость 2

Пример применения CBAR элемента
Пример:
Приложенная нагрузка
Пример применения CBAR элемента
Пример:
Приложенная нагрузка
Пример применения CBAR элемента (продолжение)
Свойства
Свойства элемента
Свойства материала
Пример применения CBAR элемента (продолжение)
Свойства
Свойства элемента
Свойства материала
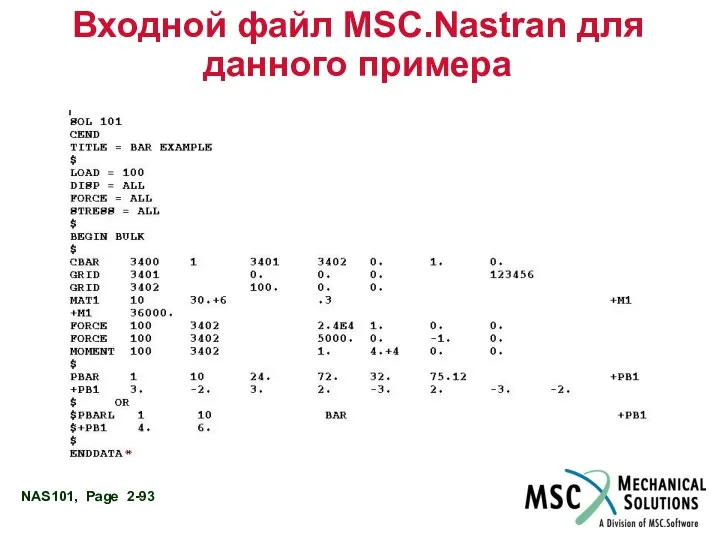
Входной файл MSC.Nastran для данного примера
Входной файл MSC.Nastran для данного примера
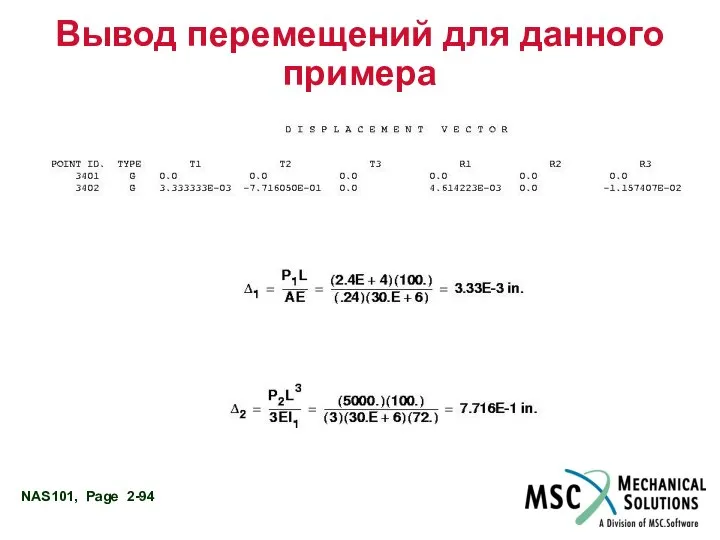
Вывод перемещений для данного примера
Вывод перемещений для данного примера

Вывод сил в элементах для данного примера
Сдвиг
Момент
Вывод сил в элементах для данного примера
Сдвиг
Момент
 Виртуальная реальность (VR)
Виртуальная реальность (VR) Программирование на языке Python
Программирование на языке Python Методы и средства интеллектуальных информационных систем
Методы и средства интеллектуальных информационных систем Области применения Python
Области применения Python Технология работы в программе обработки растровых графических изображений (лекция 2.3.3)
Технология работы в программе обработки растровых графических изображений (лекция 2.3.3) Как вести группу. Как работать с целевой аудиторией
Как вести группу. Как работать с целевой аудиторией Тема урока
Тема урока 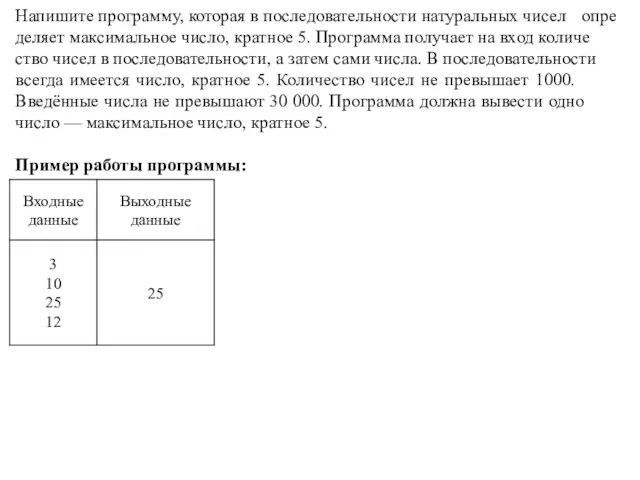 Создание программы. Пример работы программы
Создание программы. Пример работы программы Проектирование базы данных Аптечный склад
Проектирование базы данных Аптечный склад Модуль Дизайн Создание шапки в сообщество ВК
Модуль Дизайн Создание шапки в сообщество ВК Операторы цикла
Операторы цикла Работа_в_REDMINE_
Работа_в_REDMINE_ Команда Бригантина. 5 ступень
Команда Бригантина. 5 ступень Ур. 24 Пошаговое выполнение, отладка линейных программ
Ур. 24 Пошаговое выполнение, отладка линейных программ Информационные системы
Информационные системы Моделирование в среде табличного процессора
Моделирование в среде табличного процессора Разработка программного обеспечения (Software Engineering). Создание ПО
Разработка программного обеспечения (Software Engineering). Создание ПО Геометрия задачи на чертежах
Геометрия задачи на чертежах  Язык С++
Язык С++ Презентация "Глобальная компьютерная сеть Интернет" - скачать презентации по Информатике
Презентация "Глобальная компьютерная сеть Интернет" - скачать презентации по Информатике Word и Таблицы Цели урока. Работа с таблицами в текстовом редакторе. Вставка и форматирование таблицы. Примеры таблиц. Изменение
Word и Таблицы Цели урока. Работа с таблицами в текстовом редакторе. Вставка и форматирование таблицы. Примеры таблиц. Изменение  Все быстрее и быстрее. Вся правда о кэш-памяти
Все быстрее и быстрее. Вся правда о кэш-памяти Инструкция по отмене ошибочных платежей. Paynet
Инструкция по отмене ошибочных платежей. Paynet Меры безопасности и правила поведения на льду
Меры безопасности и правила поведения на льду  Работа с файлами и папками
Работа с файлами и папками Разработка игрового проекта на основе unity3d
Разработка игрового проекта на основе unity3d ЕСТЬ ЛИ БУДУЩЕЕ У БУМАЖНЫХ НОСИТЕЛЕЙ ИНФОРМАЦИИ? Васильева Дарья МБОУ «СОШ № 50», 4 «А» класс
ЕСТЬ ЛИ БУДУЩЕЕ У БУМАЖНЫХ НОСИТЕЛЕЙ ИНФОРМАЦИИ? Васильева Дарья МБОУ «СОШ № 50», 4 «А» класс  Устройство компьтера
Устройство компьтера