- Шина CAN. Интерфейс шины CAN

Содержание
- 2. CAN модуль, CAN шина, CAN интерфейс, CAN - все это названия стандарта промышленной сети, ориентированного прежде
- 3. Синхронная шина, с типом доступа Collision Resolution (CR), который в отличие от Collision Detect (CD) сетей
- 4. Для абстрагирования от среды передачи спецификация CAN избегает описывать двоичные значения как «0» и «1». Вместо
- 5. Кадр данных (data frame) — передаёт данные; Кадр запроса передачи (remote frame) — служит для запроса
- 6. При свободной шине любой узел может начинать передачу в любой момент. В случае одновременной передачи кадров
- 7. CAN имеет несколько механизмов контроля и предотвращения ошибок: Контроль передачи: при передаче битовые уровни в сети
- 8. Диапазон скоростей Все узлы в сети должны работать с одной скоростью. Стандарт CAN не определяет скоростей
- 9. Базовой спецификации CAN недостаёт многих возможностей, требуемых в реальных системах: передачи данных длиннее 8 байт, автоматического
- 10. ИНТЕРФЕЙСЫ СОПРЯЖЕНИЯ ata6660
- 11. Возможность работы в режиме жёсткого реального времени. Простота реализации и минимальные затраты на использование. Высокая устойчивость
- 13. Скачать презентацию
CAN модуль, CAN шина, CAN интерфейс, CAN - все это
CAN модуль, CAN шина, CAN интерфейс, CAN - все это
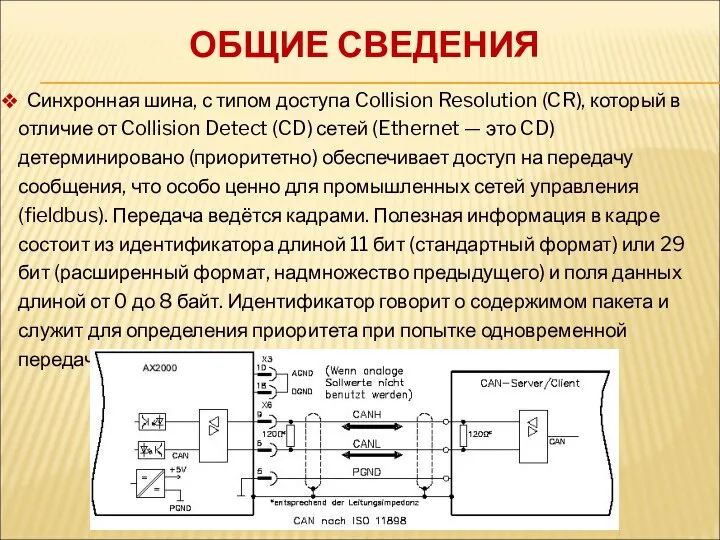
Синхронная шина, с типом доступа Collision Resolution (CR), который в
Синхронная шина, с типом доступа Collision Resolution (CR), который в
Для абстрагирования от среды передачи спецификация CAN избегает описывать двоичные
Для абстрагирования от среды передачи спецификация CAN избегает описывать двоичные
Кадр данных (data frame) — передаёт данные;
Кадр
Кадр данных (data frame) — передаёт данные;
Кадр
При свободной шине любой узел может начинать передачу в
При свободной шине любой узел может начинать передачу в
CAN имеет несколько механизмов контроля и предотвращения ошибок:
Контроль
CAN имеет несколько механизмов контроля и предотвращения ошибок:
Контроль
Диапазон скоростей
Все узлы в сети должны работать с одной скоростью.
Диапазон скоростей Все узлы в сети должны работать с одной скоростью.
Базовой спецификации CAN недостаёт многих возможностей, требуемых в реальных системах:
Базовой спецификации CAN недостаёт многих возможностей, требуемых в реальных системах:

ИНТЕРФЕЙСЫ СОПРЯЖЕНИЯ
ata6660
ИНТЕРФЕЙСЫ СОПРЯЖЕНИЯ
ata6660
Возможность работы в режиме жёсткого реального времени.
Простота реализации
Возможность работы в режиме жёсткого реального времени.
Простота реализации
 LensClick, инструмент для увеличения охвата профиля в Instagram. Проект
LensClick, инструмент для увеличения охвата профиля в Instagram. Проект Проект: Знакомство со средой программирования для детей Scratch
Проект: Знакомство со средой программирования для детей Scratch Базы данных
Базы данных Работа с текстом на примере программы Бегущая строка
Работа с текстом на примере программы Бегущая строка Алгоритмы. Мухамед бен Мусу
Алгоритмы. Мухамед бен Мусу Train with python. Predict with C++
Train with python. Predict with C++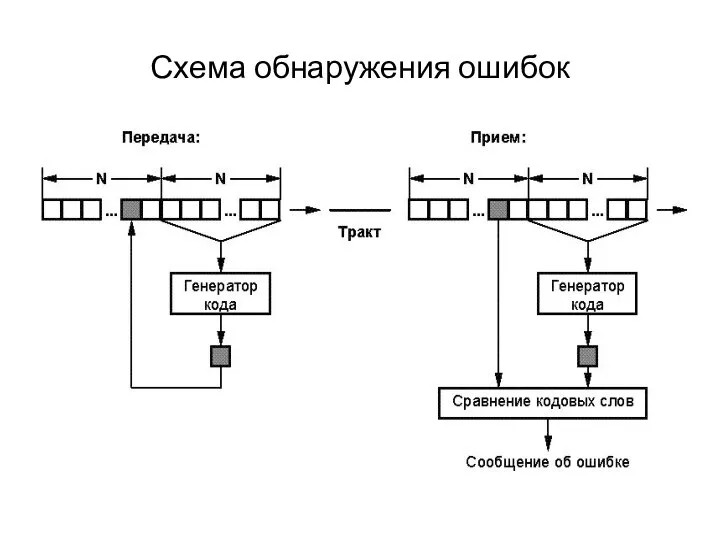 Схема обнаружения ошибок
Схема обнаружения ошибок Инновационное развитие: позиции России в международных рейтингах
Инновационное развитие: позиции России в международных рейтингах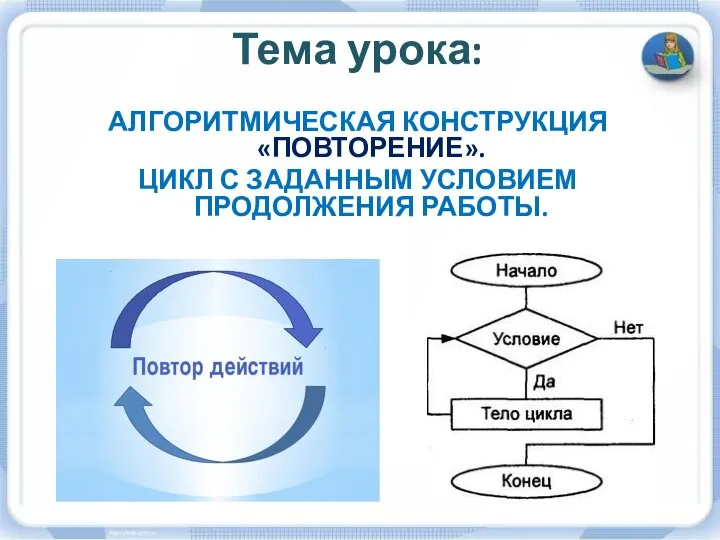 «Повторение» и почему его называют циклом?
«Повторение» и почему его называют циклом? Структурные продукты
Структурные продукты ЭВМ и периферийные устройства. Память вычислительных машин. (Лекция 4)
ЭВМ и периферийные устройства. Память вычислительных машин. (Лекция 4) Утверждение концепции дизайна мобильного приложения Челны-Хлеб
Утверждение концепции дизайна мобильного приложения Челны-Хлеб Моделирование как метод научного познания
Моделирование как метод научного познания Время #кодить
Время #кодить Автоматизация бизнес-процессов с RPA
Автоматизация бизнес-процессов с RPA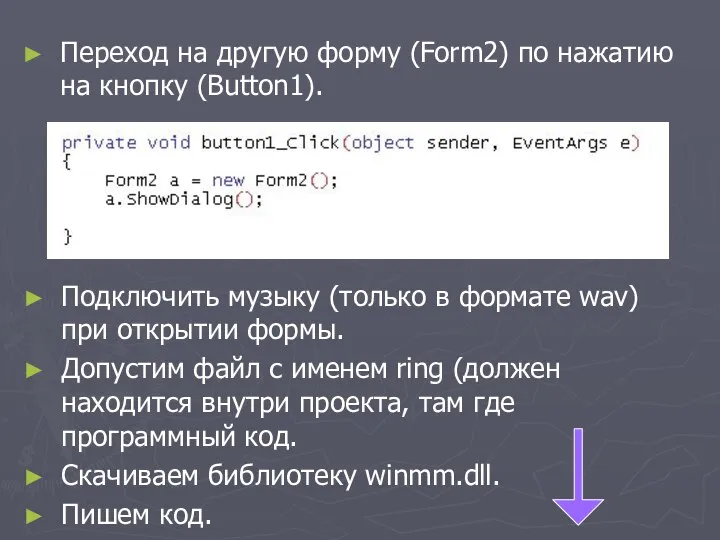 Приложения с базами данных
Приложения с базами данных Измерение информации. Алфавитный и содержательный подходы
Измерение информации. Алфавитный и содержательный подходы Организация поиска. Сбалансированные поисковые деревья
Организация поиска. Сбалансированные поисковые деревья Резидентное внутреннее решение
Резидентное внутреннее решение Put a Finger Down. Tik Tok Challenge
Put a Finger Down. Tik Tok Challenge Интеллектуалды ойын
Интеллектуалды ойын Програмна система для тестування продуктивності сервера баз даних MySQL
Програмна система для тестування продуктивності сервера баз даних MySQL Коммерческое предложение по разработке корпоративного сайта для ООО Империя Строй
Коммерческое предложение по разработке корпоративного сайта для ООО Империя Строй Кодирование информации
Кодирование информации Мобильное приложение ИСКРА для сбора статистики, анализа ключевых показателей и управлением производством
Мобильное приложение ИСКРА для сбора статистики, анализа ключевых показателей и управлением производством Операторы языка. Циклы
Операторы языка. Циклы Тележурналистке қойылатын жалпы талаптар
Тележурналистке қойылатын жалпы талаптар Информационные и рекламные издания
Информационные и рекламные издания