- Численный анализ нелинейных моделей и теория Куна-Таккера (Лекция 5)

Содержание
- 2. СОДЕРЖАНИЕ Текущий контроль Методы наискорейшего спуска (спуск по градиенту) Элементы теории Куна-Таккера
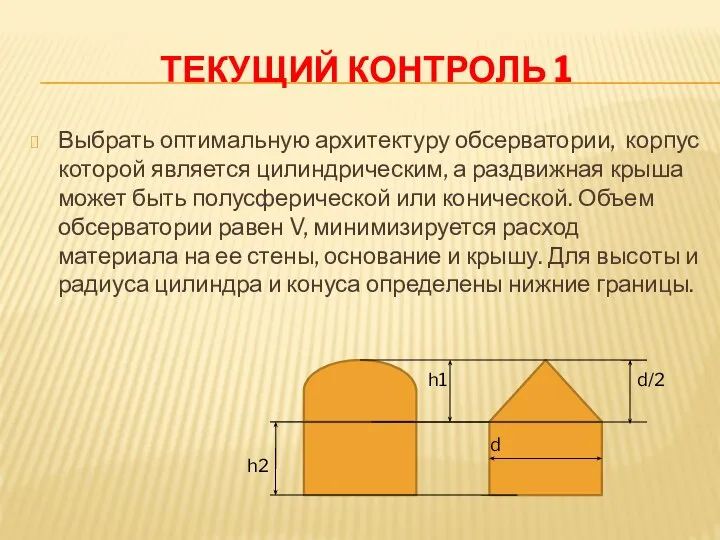
- 3. ТЕКУЩИЙ КОНТРОЛЬ 1 Выбрать оптимальную архитектуру обсерватории, корпус которой является цилиндрическим, а раздвижная крыша может быть
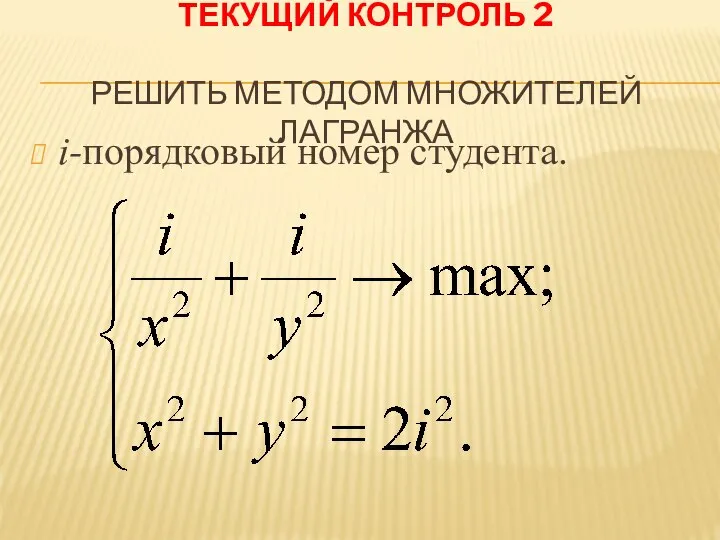
- 4. ТЕКУЩИЙ КОНТРОЛЬ 2 РЕШИТЬ МЕТОДОМ МНОЖИТЕЛЕЙ ЛАГРАНЖА i-порядковый номер студента.
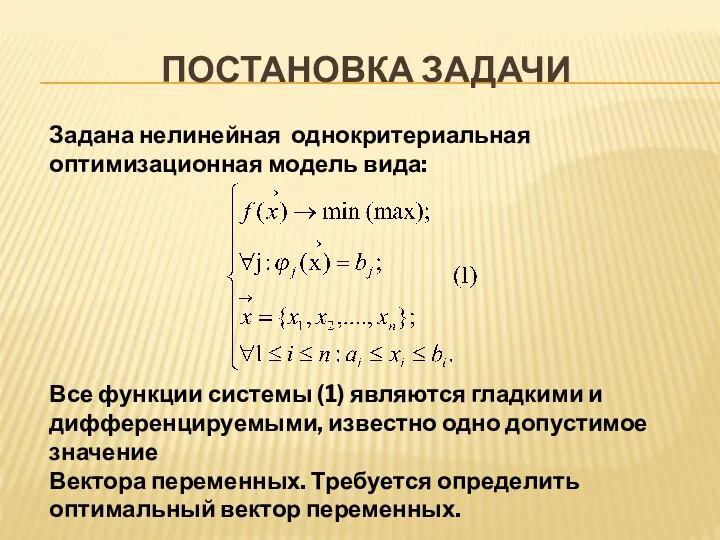
- 5. ПОСТАНОВКА ЗАДАЧИ Задана нелинейная однокритериальная оптимизационная модель вида: Все функции системы (1) являются гладкими и дифференцируемыми,
- 6. СПУСК ПО ГРАДИЕНТУ – ИДЕЯ МЕТОДА Суть метода – в движении от одной точки к другой
- 7. АЛГОРИТМ СПУСКА ПО ГРАДИЕНТУ – ПЕРВЫЕ ДВА ШАГА (ВСЕГО 10 ШАГОВ) Шаг 1. Вычисляется значение функции
- 8. АЛГОРИТМ СПУСКА ПО ГРАДИЕНТУ – СЛЕДУЮЩИЕ ЧЕТЫРЕ ШАГА Шаг 3. Вычисляется новое значение целевой функции f₁.
- 9. ПОСЛЕДНИЕ ЧЕТЫРЕ ШАГА АЛГОРИТМА Шаг 7. Старые значения переменных заменяются на новые, полученные на шаге 2
- 10. ПРИМЕР 1 Пользуясь спуском по градиенту решить задачу: Точка старта: х=у=3; f=0,66, начальная величина шага β=1,
- 11. РЕШЕНИЕ 1) z=0,8. Новые значения переменных удовлетворяют ограничениям, f=0,8, поэтому величина шага β не меняется.
- 12. РЕШЕНИЕ – ВТОРАЯ ИТЕРАЦИЯ 2) Ограничения не выполняются, поэтому величина шага β уменьшается в два раза:
- 13. РЕШЕНИЕ – ТРЕТЬЯ ИТЕРАЦИЯ 3) Ограничения выполняются, новое значение целевой функции f = 0,888.
- 14. РЕШЕНИЕ – ЧЕТВЕРТАЯ ИТЕРАЦИЯ 4) Так как ограничения не выполняются, то шаг уменьшается в 2 раза:
- 15. РЕШЕНИЕ – ПЯТАЯ ИТЕРАЦИЯ 5) Ограничения выполняются, f = 0,9411.
- 16. РЕШЕНИЕ – ШЕСТАЯ ИТЕРАЦИЯ 6) Значения переменных не удовлетворяют ограничению, шаг β уменьшается в два раза,
- 17. САМОСТОЯТЕЛЬНО Пользуясь приведенным выше алгоритмом решить задачу (2): Решить задачи (1) и (2), пользуясь методом множителей
- 18. ОПРЕДЕЛЕНИЕ ВЫПУКЛЫХ ФУНКЦИЙ Функция f называют выпуклой на интервале [a,b] если для любой точки отрезка, соединяющего
- 19. ОПРЕДЕЛЕНИЕ ВОГНУТЫХ ФУНКЦИЙ Функция f называют вогнутой на интервале [a,b] если для любой точки отрезка, соединяющего
- 20. ОПРЕДЕЛЕНИЯ ГЛОБАЛЬНОГО И ЛОКАЛЬНОГО ОПТИМУМА Функция называется локально оптимальной в точке «х» , если все значения
- 21. ЭЛЕМЕНТЫ ТЕОРИИ КУНА-ТАККЕРА Теорема 1. Если целевая функция является выпуклой и максимизируемой, а область допустимых значений
- 22. САМОСТОЯТЕЛЬНО Определить являлись ли решения задач (1) и (2), полученные выше спуском по градиенту, глобально оптимальными.
- 23. ПОИСК ПО ГРАДИЕНТУ С ИЗМЕНЯЕМОЙ ЦЕЛЕВОЙ ФУНКЦИЕЙ. 1. Определена задача: 2. Осуществляется спуск в лучшем направлении
- 24. ШАГИ 3 – 6 АЛГОРИТМА 3. Пусть J – множество индексов таких, что Строим новую целевую
- 26. Скачать презентацию
СОДЕРЖАНИЕ
Текущий контроль
Методы наискорейшего спуска (спуск по градиенту)
Элементы теории Куна-Таккера
СОДЕРЖАНИЕ
Текущий контроль
Методы наискорейшего спуска (спуск по градиенту)
Элементы теории Куна-Таккера
ТЕКУЩИЙ КОНТРОЛЬ 1
Выбрать оптимальную архитектуру обсерватории, корпус которой является цилиндрическим, а
ТЕКУЩИЙ КОНТРОЛЬ 1
Выбрать оптимальную архитектуру обсерватории, корпус которой является цилиндрическим, а
ТЕКУЩИЙ КОНТРОЛЬ 2
РЕШИТЬ МЕТОДОМ МНОЖИТЕЛЕЙ ЛАГРАНЖА
i-порядковый номер студента.
ТЕКУЩИЙ КОНТРОЛЬ 2
РЕШИТЬ МЕТОДОМ МНОЖИТЕЛЕЙ ЛАГРАНЖА
i-порядковый номер студента.
ПОСТАНОВКА ЗАДАЧИ
Задана нелинейная однокритериальная оптимизационная модель вида:
Все функции системы (1) являются
ПОСТАНОВКА ЗАДАЧИ
Задана нелинейная однокритериальная оптимизационная модель вида:
Все функции системы (1) являются
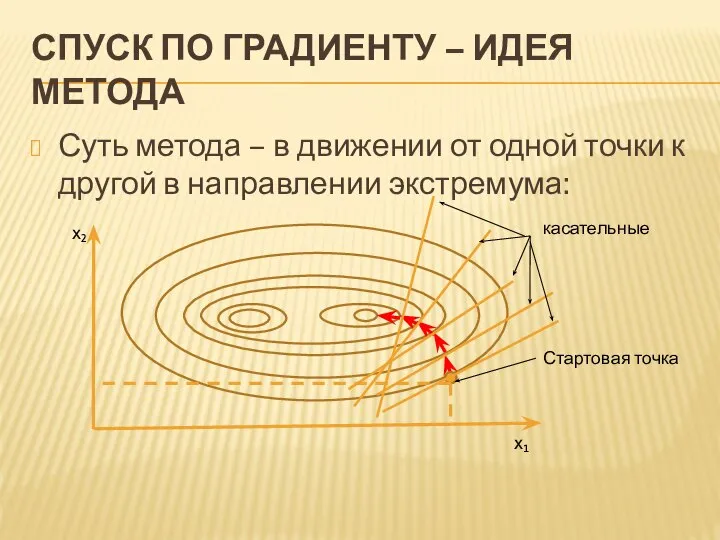
СПУСК ПО ГРАДИЕНТУ – ИДЕЯ МЕТОДА
Суть метода – в движении от
СПУСК ПО ГРАДИЕНТУ – ИДЕЯ МЕТОДА
Суть метода – в движении от
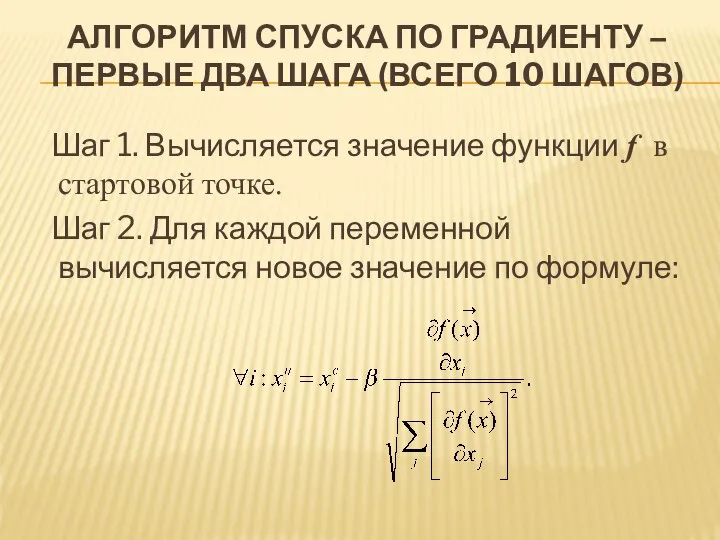
АЛГОРИТМ СПУСКА ПО ГРАДИЕНТУ – ПЕРВЫЕ ДВА ШАГА (ВСЕГО 10 ШАГОВ)
АЛГОРИТМ СПУСКА ПО ГРАДИЕНТУ – ПЕРВЫЕ ДВА ШАГА (ВСЕГО 10 ШАГОВ)
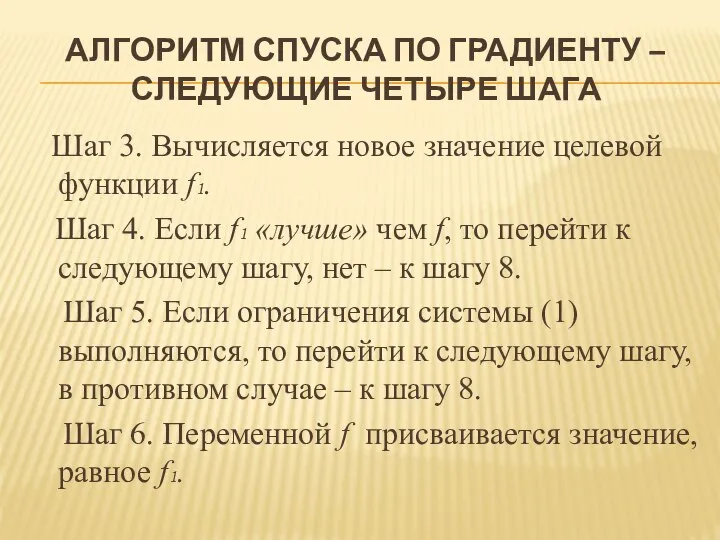
АЛГОРИТМ СПУСКА ПО ГРАДИЕНТУ – СЛЕДУЮЩИЕ ЧЕТЫРЕ ШАГА
Шаг 3. Вычисляется
АЛГОРИТМ СПУСКА ПО ГРАДИЕНТУ – СЛЕДУЮЩИЕ ЧЕТЫРЕ ШАГА
Шаг 3. Вычисляется
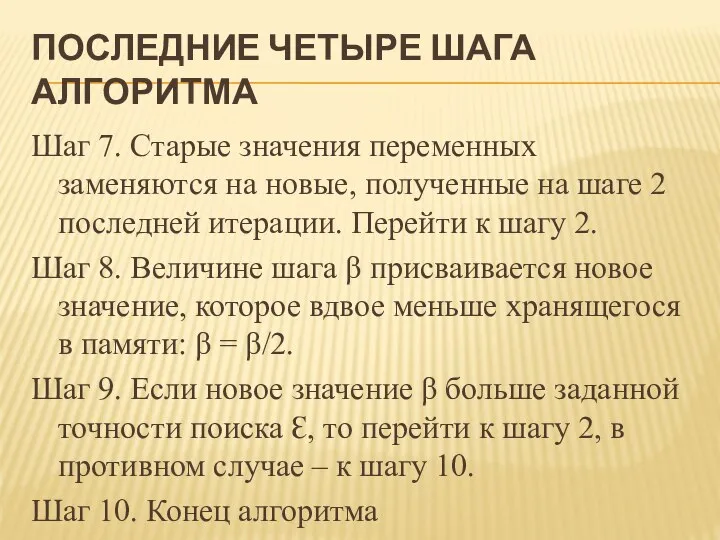
ПОСЛЕДНИЕ ЧЕТЫРЕ ШАГА АЛГОРИТМА
Шаг 7. Старые значения переменных заменяются на новые,
ПОСЛЕДНИЕ ЧЕТЫРЕ ШАГА АЛГОРИТМА
Шаг 7. Старые значения переменных заменяются на новые,
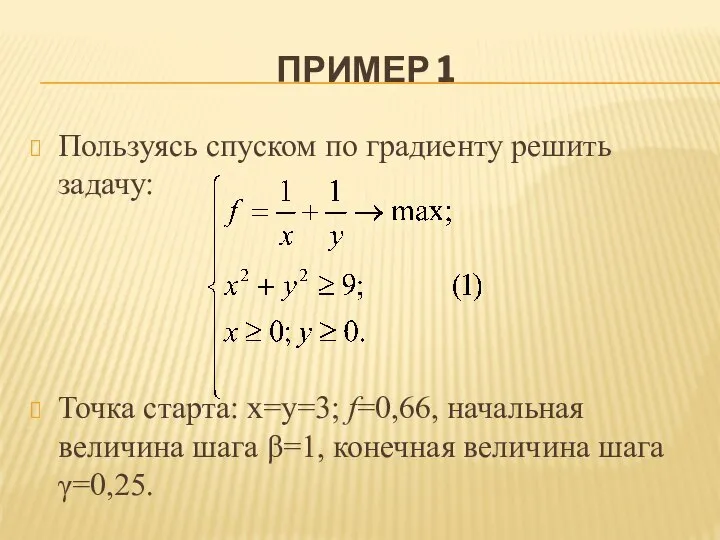
ПРИМЕР 1
Пользуясь спуском по градиенту решить задачу:
Точка старта: х=у=3; f=0,66, начальная
ПРИМЕР 1
Пользуясь спуском по градиенту решить задачу:
Точка старта: х=у=3; f=0,66, начальная
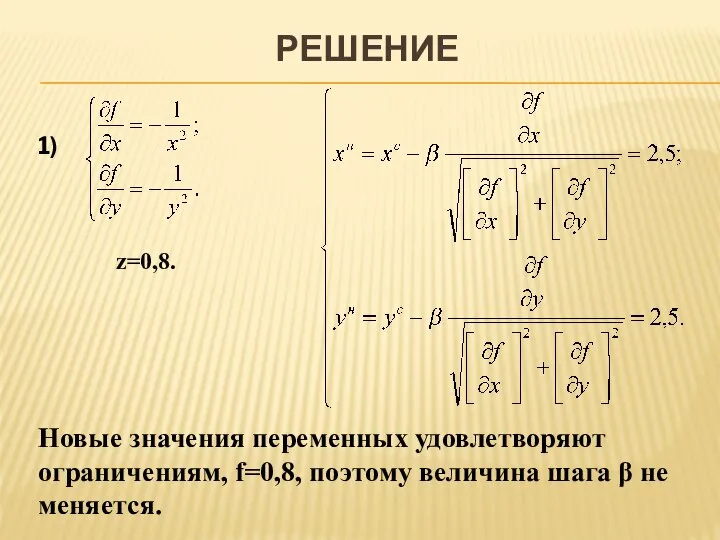
РЕШЕНИЕ
1)
z=0,8.
Новые значения переменных удовлетворяют ограничениям, f=0,8, поэтому величина шага β
РЕШЕНИЕ
1)
z=0,8.
Новые значения переменных удовлетворяют ограничениям, f=0,8, поэтому величина шага β
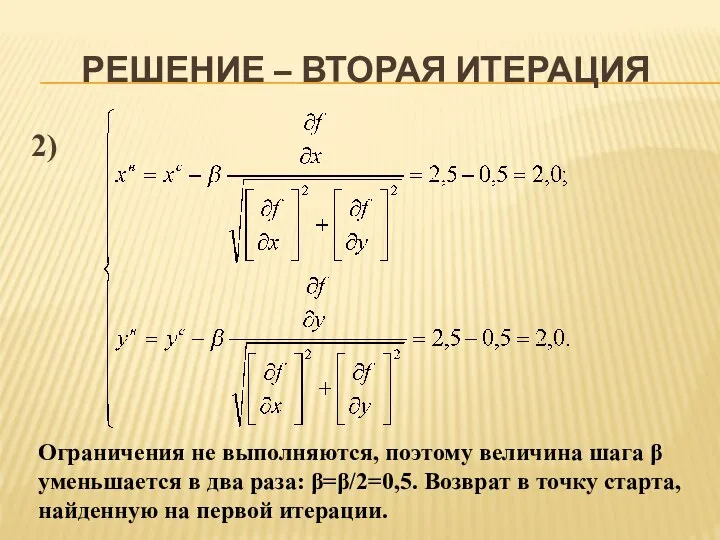
РЕШЕНИЕ – ВТОРАЯ ИТЕРАЦИЯ
2)
Ограничения не выполняются, поэтому величина шага β
РЕШЕНИЕ – ВТОРАЯ ИТЕРАЦИЯ
2)
Ограничения не выполняются, поэтому величина шага β
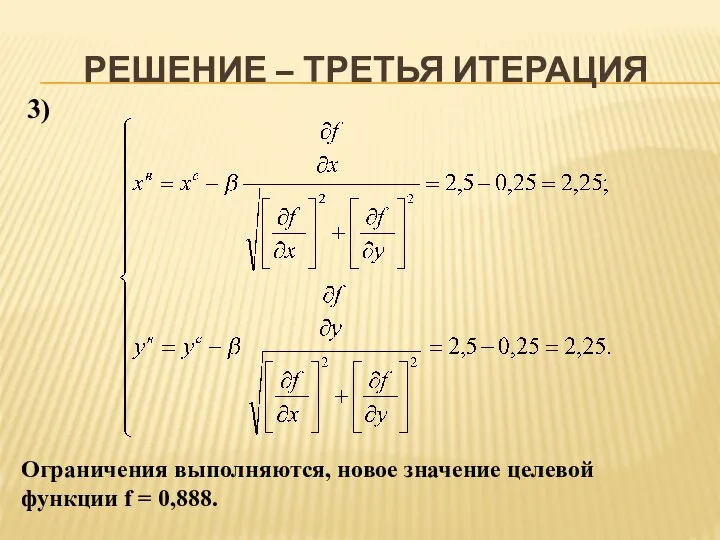
РЕШЕНИЕ – ТРЕТЬЯ ИТЕРАЦИЯ
3)
Ограничения выполняются, новое значение целевой функции f =
РЕШЕНИЕ – ТРЕТЬЯ ИТЕРАЦИЯ
3)
Ограничения выполняются, новое значение целевой функции f =
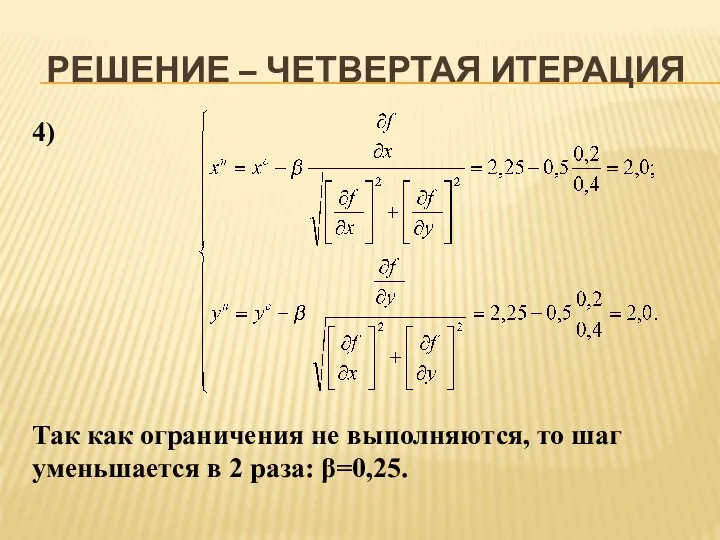
РЕШЕНИЕ – ЧЕТВЕРТАЯ ИТЕРАЦИЯ
4)
Так как ограничения не выполняются, то шаг уменьшается
РЕШЕНИЕ – ЧЕТВЕРТАЯ ИТЕРАЦИЯ
4)
Так как ограничения не выполняются, то шаг уменьшается
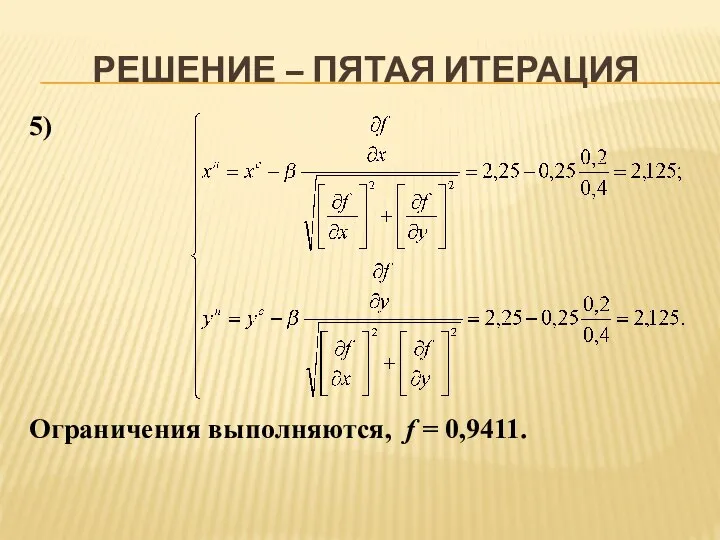
РЕШЕНИЕ – ПЯТАЯ ИТЕРАЦИЯ
5)
Ограничения выполняются, f = 0,9411.
РЕШЕНИЕ – ПЯТАЯ ИТЕРАЦИЯ
5)
Ограничения выполняются, f = 0,9411.
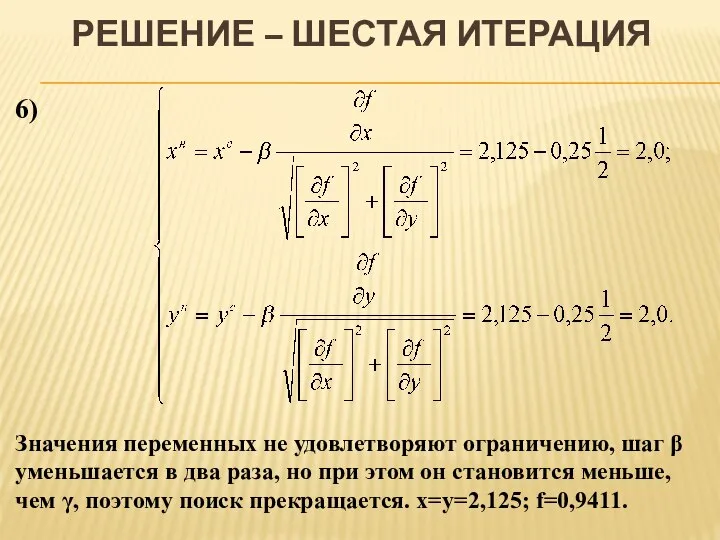
РЕШЕНИЕ – ШЕСТАЯ ИТЕРАЦИЯ
6)
Значения переменных не удовлетворяют ограничению, шаг β уменьшается
РЕШЕНИЕ – ШЕСТАЯ ИТЕРАЦИЯ
6)
Значения переменных не удовлетворяют ограничению, шаг β уменьшается
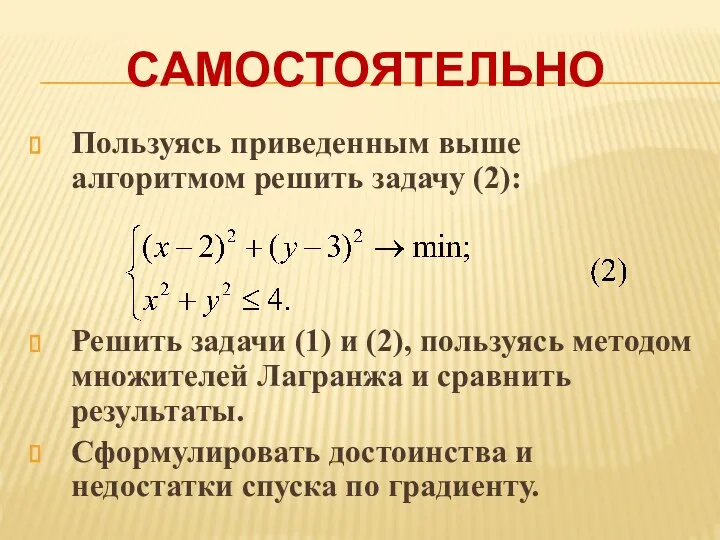
САМОСТОЯТЕЛЬНО
Пользуясь приведенным выше алгоритмом решить задачу (2):
Решить задачи (1) и (2),
САМОСТОЯТЕЛЬНО
Пользуясь приведенным выше алгоритмом решить задачу (2):
Решить задачи (1) и (2),
![ОПРЕДЕЛЕНИЕ ВЫПУКЛЫХ ФУНКЦИЙ Функция f называют выпуклой на интервале [a,b] если](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1467084/slide-17.jpg)
ОПРЕДЕЛЕНИЕ ВЫПУКЛЫХ ФУНКЦИЙ
Функция f называют выпуклой на интервале [a,b] если для
ОПРЕДЕЛЕНИЕ ВЫПУКЛЫХ ФУНКЦИЙ
Функция f называют выпуклой на интервале [a,b] если для
![ОПРЕДЕЛЕНИЕ ВОГНУТЫХ ФУНКЦИЙ Функция f называют вогнутой на интервале [a,b] если](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1467084/slide-18.jpg)
ОПРЕДЕЛЕНИЕ ВОГНУТЫХ ФУНКЦИЙ
Функция f называют вогнутой на интервале [a,b] если для
ОПРЕДЕЛЕНИЕ ВОГНУТЫХ ФУНКЦИЙ
Функция f называют вогнутой на интервале [a,b] если для
ОПРЕДЕЛЕНИЯ ГЛОБАЛЬНОГО И ЛОКАЛЬНОГО ОПТИМУМА
Функция называется локально оптимальной в точке «х»
ОПРЕДЕЛЕНИЯ ГЛОБАЛЬНОГО И ЛОКАЛЬНОГО ОПТИМУМА
Функция называется локально оптимальной в точке «х»
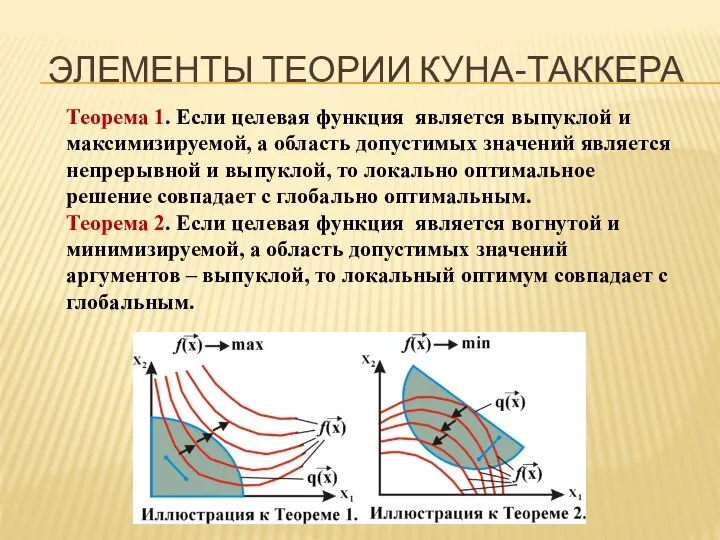
ЭЛЕМЕНТЫ ТЕОРИИ КУНА-ТАККЕРА
Теорема 1. Если целевая функция является выпуклой и максимизируемой,
ЭЛЕМЕНТЫ ТЕОРИИ КУНА-ТАККЕРА
Теорема 1. Если целевая функция является выпуклой и максимизируемой,
САМОСТОЯТЕЛЬНО
Определить являлись ли решения задач (1) и (2), полученные выше спуском
САМОСТОЯТЕЛЬНО
Определить являлись ли решения задач (1) и (2), полученные выше спуском
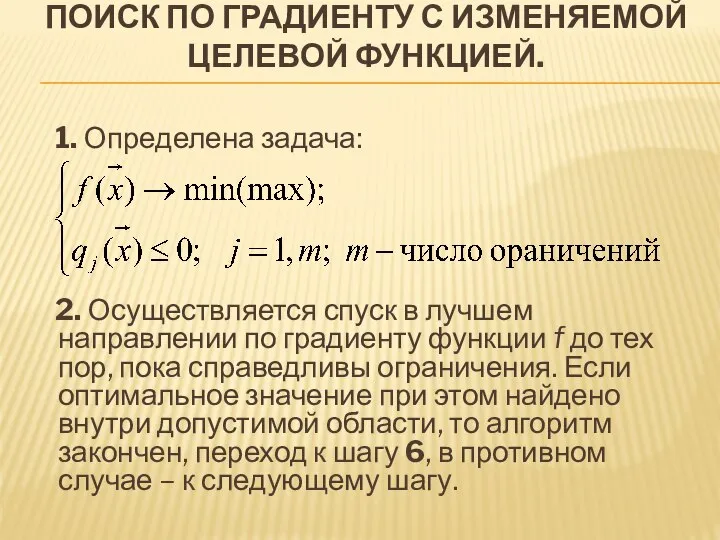
ПОИСК ПО ГРАДИЕНТУ С ИЗМЕНЯЕМОЙ ЦЕЛЕВОЙ ФУНКЦИЕЙ.
1. Определена задача:
2. Осуществляется
ПОИСК ПО ГРАДИЕНТУ С ИЗМЕНЯЕМОЙ ЦЕЛЕВОЙ ФУНКЦИЕЙ.
1. Определена задача:
2. Осуществляется
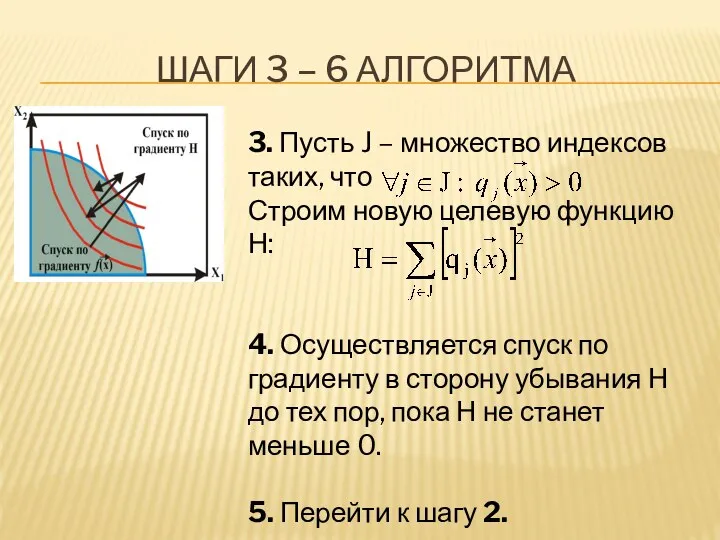
ШАГИ 3 – 6 АЛГОРИТМА
3. Пусть J – множество индексов таких,
ШАГИ 3 – 6 АЛГОРИТМА
3. Пусть J – множество индексов таких,
 Сложение чисел с помощью координатной прямой
Сложение чисел с помощью координатной прямой Вычисление производных
Вычисление производных Повторение. Алгебра 9 класс (урок 4)
Повторение. Алгебра 9 класс (урок 4) Распределительный закон. История возникновения
Распределительный закон. История возникновения Обратная матрица
Обратная матрица Задачи по математике
Задачи по математике Аттестационная работа. Образовательная программа общеинтеллектуального направления В мире математики
Аттестационная работа. Образовательная программа общеинтеллектуального направления В мире математики Применение математических методов для решения содержательных задач из различных областей науки и практики
Применение математических методов для решения содержательных задач из различных областей науки и практики Поговорим о нуле
Поговорим о нуле Численное моделирование сечений скалярных полей на конечно-элементных сетках
Численное моделирование сечений скалярных полей на конечно-элементных сетках Понятие алгоритма. Свойства алгоритмов. Формы записей алгоритмов. Общие принципы построения алгоритмов
Понятие алгоритма. Свойства алгоритмов. Формы записей алгоритмов. Общие принципы построения алгоритмов Бесконечно убывающая геометрическая последовательность и ее сумма
Бесконечно убывающая геометрическая последовательность и ее сумма Прямоугольник
Прямоугольник Факторный анализ
Факторный анализ Таблица умножения на пальцах
Таблица умножения на пальцах Проектная деятельность в школе как показатель сформированности познавательных УУД
Проектная деятельность в школе как показатель сформированности познавательных УУД Углы
Углы Формулы производной тангенса и котангенса
Формулы производной тангенса и котангенса Прямоугольник. Ось симметрии фигуры
Прямоугольник. Ось симметрии фигуры Округление дробей
Округление дробей Фигуры: плоские и объёмные
Фигуры: плоские и объёмные Событие, вероятность события. Сложение и умножение вероятностей. Понятие о независимости событий
Событие, вероятность события. Сложение и умножение вероятностей. Понятие о независимости событий Элементы теории ошибок измерений. Лекция №6
Элементы теории ошибок измерений. Лекция №6 Величины и их измерение
Величины и их измерение Использование производной для исследования функций и построения графиков. 11 класс
Использование производной для исследования функций и построения графиков. 11 класс Площадь круга
Площадь круга Из истории геометрии
Из истории геометрии Раскрытие скобок и заключение в скобки
Раскрытие скобок и заключение в скобки