- Геометрический метод решения задачи линейного программирования

Содержание
- 2. 1. Сведение задачи линейного программирования к канонической форме Примеры перехода от ограничений – неравенств к ограничениям
- 3. Пример 2. Предположим в системе (1) переменная X2 может быть меньше нуля. Введем в систему ограничений
- 4. 2. Основные понятия и определения систем линейных уравнений Система m линейных уравнений с n переменными называется
- 5. система уравнений 3x1 + x2 – x3 = 2, x1 - x2 + x3 = 6
- 6. В дальнейшем будем полагать, что уравнения системы независимы. Если система уравнений содержит столько переменных, сколько в
- 7. Каждому разбиению переменных системы на базисные и свободные соответствует одно базисное решение. В базисном решении свободные
- 8. Основные теоремы линейного программирования Теорема 1. Множество всех допустимых решений системы ограничений ЗЛП представляет собой на
- 9. В случае общей постановки ЗЛП, число добавочных переменных меньше m, и равно m – t ,
- 10. Система m линейных уравнений с n переменными запишется как: a11 x1 + a12 x2 + …+
- 11. Геометрический метод решения задачи линейного программирования 1. Привести задачу ЛП к канонической форме (основной задаче линейного
- 12. 9. Определить направление перемещения опорной прямой, при котором целевая функция минимизируется (максимизируется) в соответствии с условием
- 13. Возможные варианты решений задачи линейного программирования: 1. Оптимальное решение, если оно существует, достигается на границе многоугольника
- 14. Пример решения задачи линейного программирования геометрическим методом Задача. Найти неотрицательные значения переменных удовлетворяющие системе ограничений и
- 15. Выберем х1,х2 в качестве свободных переменных. Тогда базисные переменные можно выразить следующим образом: 3. Проведем координатные
- 16. Рис.1 Геометрический метод решения задачи линейного программирования
- 17. 4. Полученный треугольник, ограниченный прямыми х3 = 0, х4 = 0 положительной полуосью Ох1 является областью
- 18. 6. Перемещая опорную прямую параллельно прямой L(X) = 0 в направлении минимизации L(X), находим вершину выпуклого
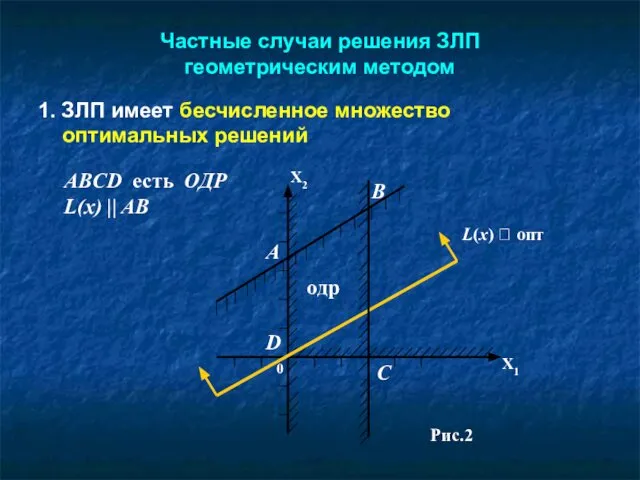
- 19. Частные случаи решения ЗЛП геометрическим методом 1. ЗЛП имеет бесчисленное множество оптимальных решений L(x) ? опт
- 20. 2. ЗЛП имеет не имеет оптимальных решений 2. ЗЛП имеет не имеет оптимальных решений Рис.3
- 21. 2. ЗЛП имеет имеет единственное оптимальное решение при незамкнутой ОДР L(x) имеет оптимальное значение при X1
- 23. Скачать презентацию
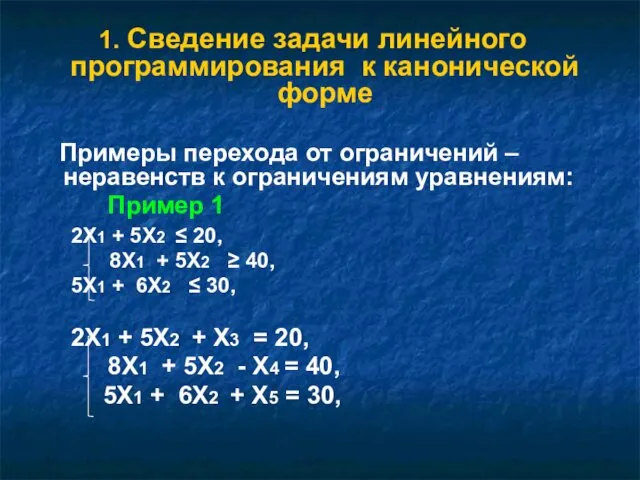
1. Сведение задачи линейного программирования к канонической форме
Примеры перехода от ограничений
1. Сведение задачи линейного программирования к канонической форме
Примеры перехода от ограничений

Пример 2. Предположим в системе (1) переменная X2 может быть меньше
Пример 2. Предположим в системе (1) переменная X2 может быть меньше
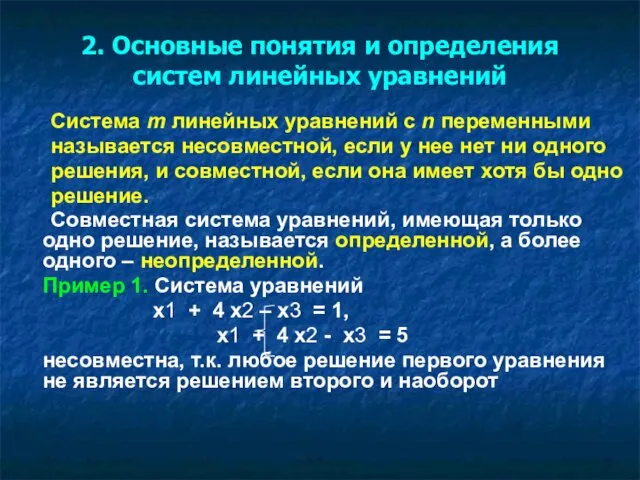
2. Основные понятия и определения систем линейных уравнений
Система m линейных уравнений
2. Основные понятия и определения систем линейных уравнений
Система m линейных уравнений
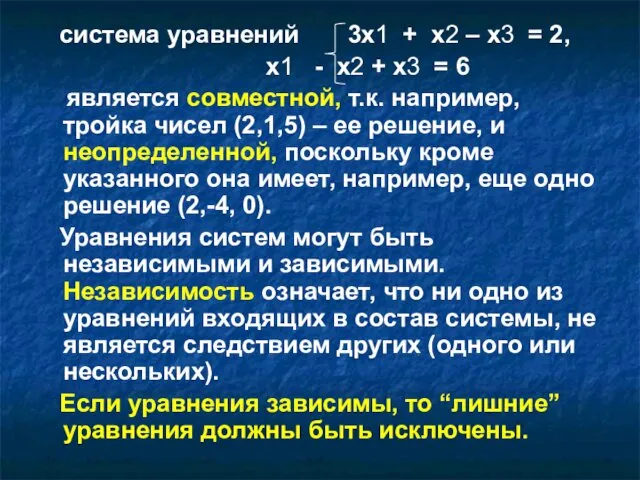
система уравнений 3x1 + x2 – x3 = 2,
x1
система уравнений 3x1 + x2 – x3 = 2,
x1
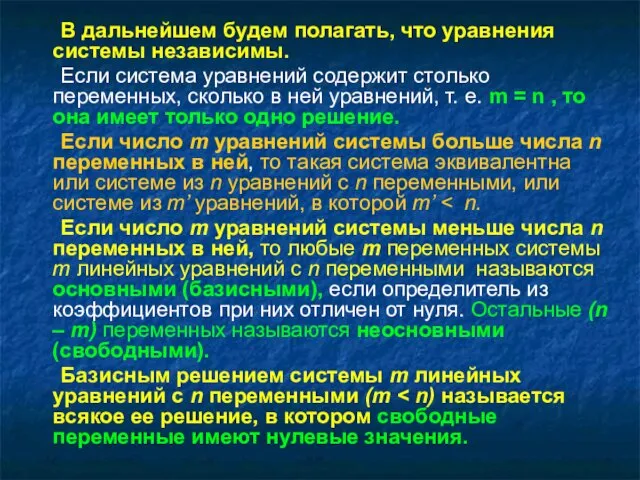
В дальнейшем будем полагать, что уравнения системы независимы.
Если система уравнений содержит
В дальнейшем будем полагать, что уравнения системы независимы.
Если система уравнений содержит
Каждому разбиению переменных системы на базисные и свободные соответствует одно
Каждому разбиению переменных системы на базисные и свободные соответствует одно
Основные теоремы линейного программирования
Теорема 1. Множество всех допустимых решений системы ограничений
Основные теоремы линейного программирования
Теорема 1. Множество всех допустимых решений системы ограничений
В случае общей постановки ЗЛП, число добавочных переменных меньше m, и
В случае общей постановки ЗЛП, число добавочных переменных меньше m, и
Система m линейных уравнений с n переменными запишется как:
a11
Система m линейных уравнений с n переменными запишется как:
a11
Геометрический метод решения задачи линейного программирования
1. Привести задачу ЛП к канонической
Геометрический метод решения задачи линейного программирования
1. Привести задачу ЛП к канонической
9. Определить направление перемещения опорной прямой, при котором целевая функция минимизируется
9. Определить направление перемещения опорной прямой, при котором целевая функция минимизируется
Возможные варианты решений задачи линейного программирования:
1. Оптимальное решение, если оно существует,
Возможные варианты решений задачи линейного программирования:
1. Оптимальное решение, если оно существует,
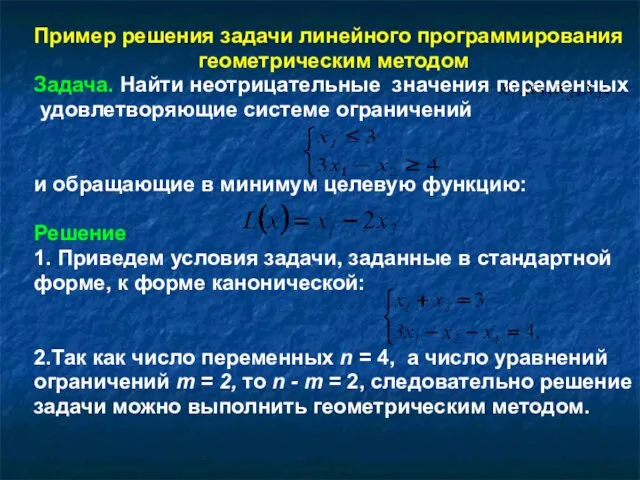
Пример решения задачи линейного программирования
геометрическим методом
Задача. Найти неотрицательные значения переменных
Пример решения задачи линейного программирования
геометрическим методом
Задача. Найти неотрицательные значения переменных
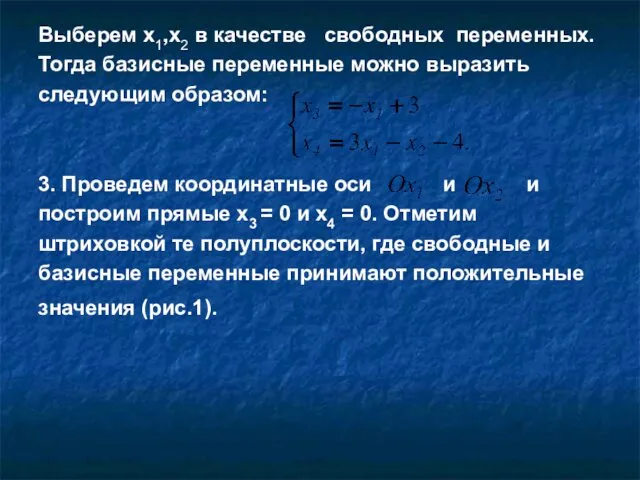
Выберем х1,х2 в качестве свободных переменных.
Тогда базисные переменные можно выразить
следующим образом:
3.
Выберем х1,х2 в качестве свободных переменных.
Тогда базисные переменные можно выразить
следующим образом:
3.
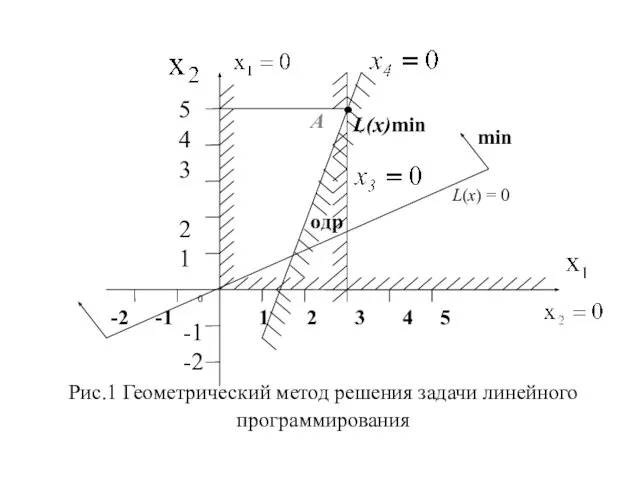
Рис.1 Геометрический метод решения задачи линейного
программирования
Рис.1 Геометрический метод решения задачи линейного
программирования
4. Полученный треугольник, ограниченный прямыми х3 = 0, х4 = 0
4. Полученный треугольник, ограниченный прямыми х3 = 0, х4 = 0
6. Перемещая опорную прямую параллельно прямой L(X) = 0 в направлении
6. Перемещая опорную прямую параллельно прямой L(X) = 0 в направлении
Частные случаи решения ЗЛП
геометрическим методом
1. ЗЛП имеет бесчисленное множество
Частные случаи решения ЗЛП
геометрическим методом
1. ЗЛП имеет бесчисленное множество
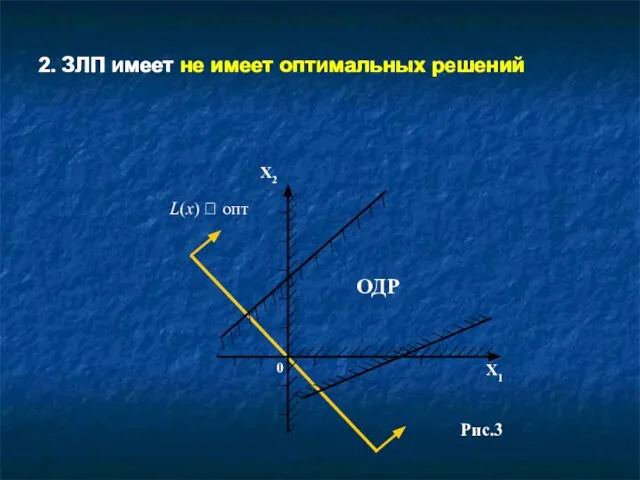
2. ЗЛП имеет не имеет оптимальных решений
2. ЗЛП имеет не имеет
2. ЗЛП имеет не имеет оптимальных решений
2. ЗЛП имеет не имеет
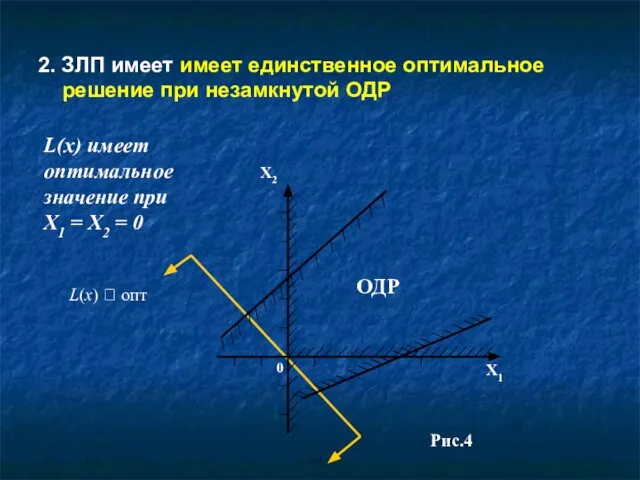
2. ЗЛП имеет имеет единственное оптимальное решение при незамкнутой ОДР
L(x) имеет
2. ЗЛП имеет имеет единственное оптимальное решение при незамкнутой ОДР
L(x) имеет
 Собственные значения и собственные векторы матрицы
Собственные значения и собственные векторы матрицы Презентация по математике "Математическая рыбалка" - скачать
Презентация по математике "Математическая рыбалка" - скачать  Многогранник призма
Многогранник призма Комплексные числа и координатная плоскость
Комплексные числа и координатная плоскость Презентация на тему Методика обучения решению простых задач
Презентация на тему Методика обучения решению простых задач  Презентация Предмет математического анализа и его роль в экономической теории.
Презентация Предмет математического анализа и его роль в экономической теории. Действия с обыкновенными дробями
Действия с обыкновенными дробями Многоугольники. Четырёхугольники
Многоугольники. Четырёхугольники Аппроксимирующий полином Ньютона
Аппроксимирующий полином Ньютона Пропорции. Основное свойство пропорции
Пропорции. Основное свойство пропорции Аттестационная работа. Методическая разработка по выполнению исследовательской работы Математика в музыке
Аттестационная работа. Методическая разработка по выполнению исследовательской работы Математика в музыке Связные компоненты графа. Разделяющие множества и разрезы
Связные компоненты графа. Разделяющие множества и разрезы Мой любимый предмет – геометрия. «Геометрия – прообраз красоты мира.» И. Кеплер. 11 класс
Мой любимый предмет – геометрия. «Геометрия – прообраз красоты мира.» И. Кеплер. 11 класс Считаем с Чиполлино. Математика 1 класс
Считаем с Чиполлино. Математика 1 класс Производная. Устные упражнения
Производная. Устные упражнения Текстовые задачи в школьном курсе математики
Текстовые задачи в школьном курсе математики Первый признак равенства треугольников
Первый признак равенства треугольников Этапы расчета прогнозных значений с помощью корреляционно-регрессионного анализа (однофакторная модель)
Этапы расчета прогнозных значений с помощью корреляционно-регрессионного анализа (однофакторная модель) Элементарные функции
Элементарные функции Разложение вектора по двум неколлинеарным векторам
Разложение вектора по двум неколлинеарным векторам Аттестационная работа. Образовательная программа дополнительного образования «Техническое рисование»
Аттестационная работа. Образовательная программа дополнительного образования «Техническое рисование» Презентация по математике "Модуль числа"
Презентация по математике "Модуль числа" Презентация по математике "Чебышев Пафнутий Львович" - скачать
Презентация по математике "Чебышев Пафнутий Львович" - скачать 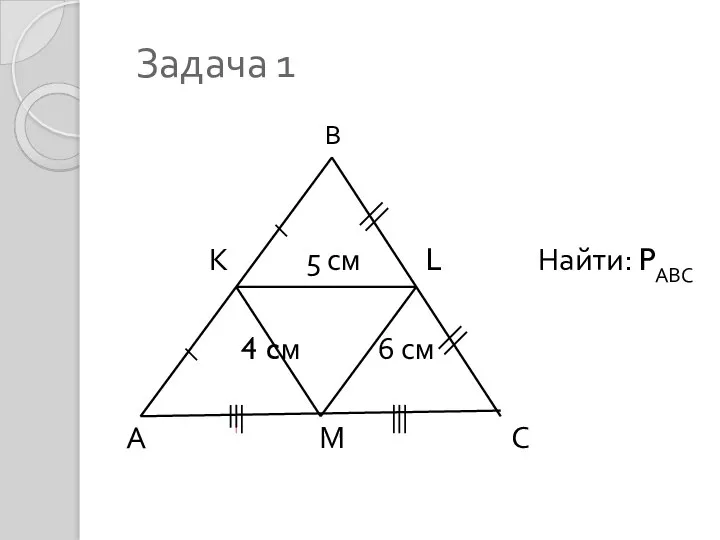 Средняя линия треугольника
Средняя линия треугольника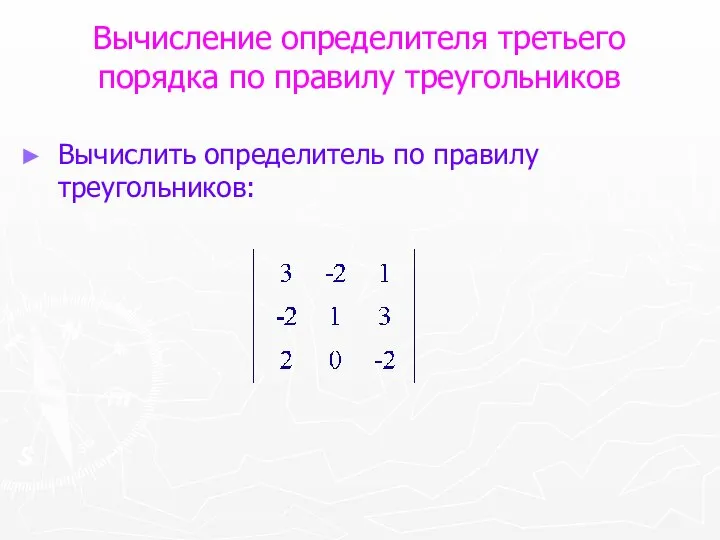 Вычисление определителя третьего порядка по правилу треугольников
Вычисление определителя третьего порядка по правилу треугольников Изучение основ Анализа формальных понятий
Изучение основ Анализа формальных понятий Выполнили проект:Воробьёв Никита Марулёв Сергей Назаров Кирилл Руководитель проекта:Куделькина Инна Алексеевна
Выполнили проект:Воробьёв Никита Марулёв Сергей Назаров Кирилл Руководитель проекта:Куделькина Инна Алексеевна Преобразование графиков функций
Преобразование графиков функций