- Методы Флетчера-Ривса, Дэвидона-Флетчера-Пауэлла, Кубической интерполяции

Содержание
- 2. СОДЕРЖАНИЕ Метод Флетчера-Ривза Алгоритм Дэвидона - Флетчера - Пауэлла Метод кубической интерполяции
- 3. МЕТОД ФЛЕТЧЕРА-РИВЗА
- 4. МЕТОД СОПРЯЖЕННЫХ ГРАДИЕНТОВ Формирует направления поиска, в большей мере соответствующие геометрии минимизируемой функции. Определение. Два n-мерных
- 5. СТРАТЕГИЯ МЕТОДА ФЛЕТЧЕРА-РИВСА Состоит в построении последовательности точек {xk}, k=0, 1, 2, ... таких, что f(xk+1)
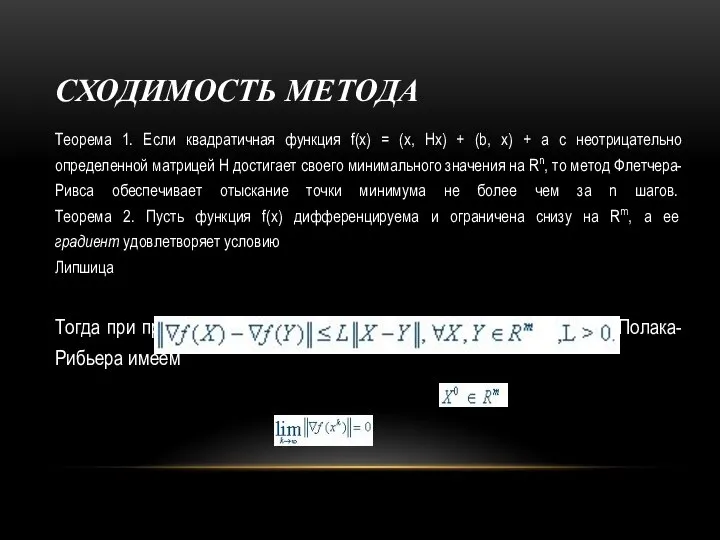
- 6. СХОДИМОСТЬ МЕТОДА Теорема 1. Если квадратичная функция f(x) = (х, Нх) + (b, х) + а
- 7. Теорема 2 гарантирует сходимость последовательности {xk} к стационарной точке x*, где ▽f(x*)=0. Поэтому найденная точка x*
- 8. АЛГОРИТМ ДЭВИДОНА - ФЛЕТЧЕРА - ПАУЭЛЛА Рассмотрим алгоритм Дэвидона - Флетчера - Пауэлла минимизации дифференцируемой функции
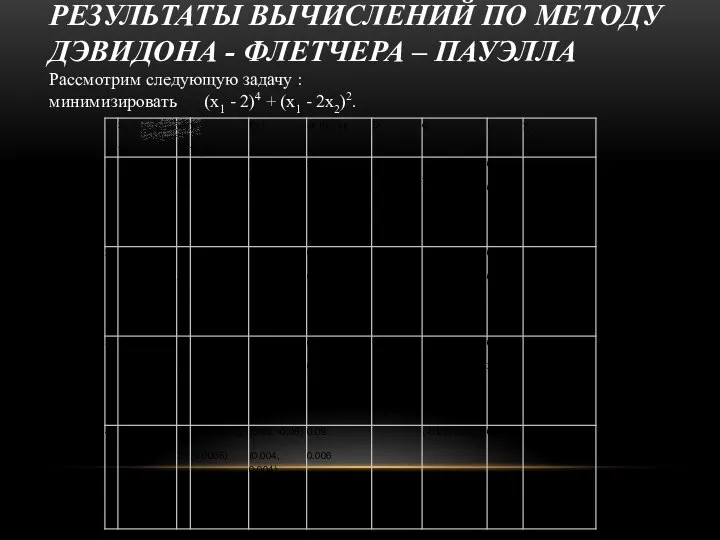
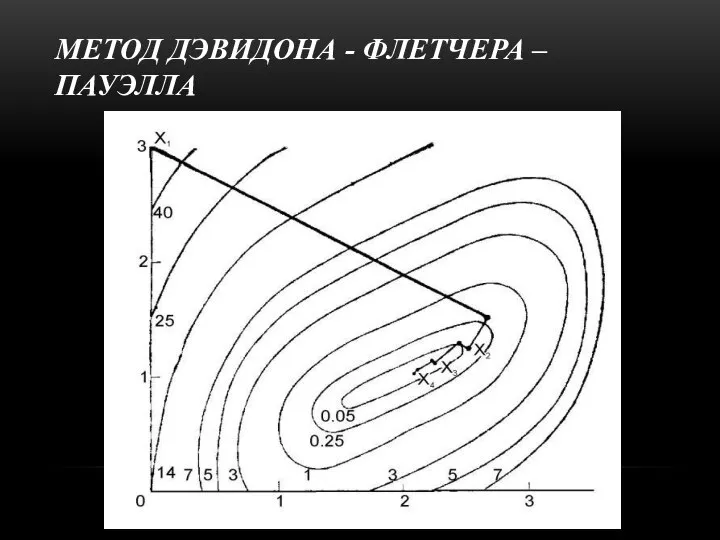
- 9. РЕЗУЛЬТАТЫ ВЫЧИСЛЕНИЙ ПО МЕТОДУ ДЭВИДОНА - ФЛЕТЧЕРА – ПАУЭЛЛА Рассмотрим следующую задачу : минимизировать (x1 -
- 10. МЕТОД ДЭВИДОНА - ФЛЕТЧЕРА – ПАУЭЛЛА
- 11. МЕТОД КУБИЧЕСКОЙ ИНТЕРПОЛЯЦИИ При решении реальных задач редко приходится иметь дело с функциями одной переменной. Однако
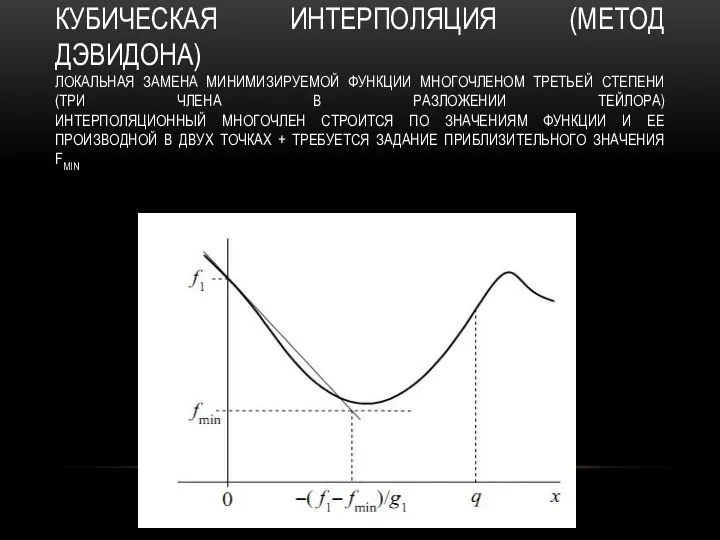
- 12. КУБИЧЕСКАЯ ИНТЕРПОЛЯЦИЯ (МЕТОД ДЭВИДОНА) ЛОКАЛЬНАЯ ЗАМЕНА МИНИМИЗИРУЕМОЙ ФУНКЦИИ МНОГОЧЛЕНОМ ТРЕТЬЕЙ СТЕПЕНИ (ТРИ ЧЛЕНА В РАЗЛОЖЕНИИ ТЕЙЛОРА)
- 13. ЗАКЛЮЧЕНИЕ Метод сопряженных градиентов формирует направления поиска, в большей мере соответствующие геометрии минимизируемой функции. Первоначально метод
- 15. Скачать презентацию
СОДЕРЖАНИЕ
Метод Флетчера-Ривза
Алгоритм Дэвидона - Флетчера - Пауэлла
Метод кубической интерполяции
СОДЕРЖАНИЕ
Метод Флетчера-Ривза
Алгоритм Дэвидона - Флетчера - Пауэлла
Метод кубической интерполяции
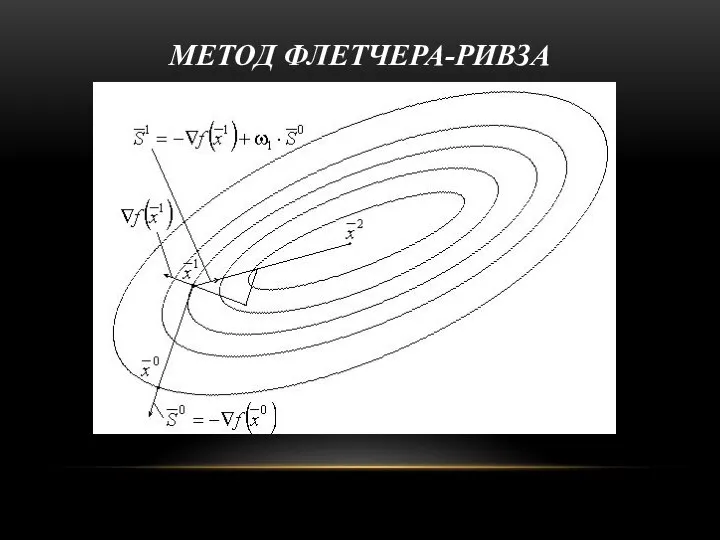
МЕТОД ФЛЕТЧЕРА-РИВЗА
МЕТОД ФЛЕТЧЕРА-РИВЗА
МЕТОД СОПРЯЖЕННЫХ ГРАДИЕНТОВ
Формирует направления поиска, в большей мере соответствующие геометрии минимизируемой
МЕТОД СОПРЯЖЕННЫХ ГРАДИЕНТОВ
Формирует направления поиска, в большей мере соответствующие геометрии минимизируемой
СТРАТЕГИЯ МЕТОДА ФЛЕТЧЕРА-РИВСА
Состоит в построении последовательности точек {xk}, k=0, 1, 2,
СТРАТЕГИЯ МЕТОДА ФЛЕТЧЕРА-РИВСА
Состоит в построении последовательности точек {xk}, k=0, 1, 2,
СХОДИМОСТЬ МЕТОДА
Теорема 1. Если квадратичная функция f(x) = (х, Нх) +
СХОДИМОСТЬ МЕТОДА
Теорема 1. Если квадратичная функция f(x) = (х, Нх) +
Теорема 2 гарантирует сходимость последовательности {xk} к стационарной точке x*, где
Теорема 2 гарантирует сходимость последовательности {xk} к стационарной точке x*, где
АЛГОРИТМ ДЭВИДОНА - ФЛЕТЧЕРА - ПАУЭЛЛА
Рассмотрим алгоритм Дэвидона - Флетчера -
АЛГОРИТМ ДЭВИДОНА - ФЛЕТЧЕРА - ПАУЭЛЛА
Рассмотрим алгоритм Дэвидона - Флетчера -
РЕЗУЛЬТАТЫ ВЫЧИСЛЕНИЙ ПО МЕТОДУ ДЭВИДОНА - ФЛЕТЧЕРА – ПАУЭЛЛА
Рассмотрим следующую задачу
РЕЗУЛЬТАТЫ ВЫЧИСЛЕНИЙ ПО МЕТОДУ ДЭВИДОНА - ФЛЕТЧЕРА – ПАУЭЛЛА Рассмотрим следующую задачу
МЕТОД ДЭВИДОНА - ФЛЕТЧЕРА – ПАУЭЛЛА
МЕТОД ДЭВИДОНА - ФЛЕТЧЕРА – ПАУЭЛЛА
МЕТОД КУБИЧЕСКОЙ ИНТЕРПОЛЯЦИИ
При решении реальных задач редко приходится иметь дело с
МЕТОД КУБИЧЕСКОЙ ИНТЕРПОЛЯЦИИ
При решении реальных задач редко приходится иметь дело с
КУБИЧЕСКАЯ ИНТЕРПОЛЯЦИЯ (МЕТОД ДЭВИДОНА)
ЛОКАЛЬНАЯ ЗАМЕНА МИНИМИЗИРУЕМОЙ ФУНКЦИИ МНОГОЧЛЕНОМ ТРЕТЬЕЙ СТЕПЕНИ (ТРИ
КУБИЧЕСКАЯ ИНТЕРПОЛЯЦИЯ (МЕТОД ДЭВИДОНА) ЛОКАЛЬНАЯ ЗАМЕНА МИНИМИЗИРУЕМОЙ ФУНКЦИИ МНОГОЧЛЕНОМ ТРЕТЬЕЙ СТЕПЕНИ (ТРИ
ЗАКЛЮЧЕНИЕ
Метод сопряженных градиентов формирует направления поиска, в большей мере соответствующие геометрии
ЗАКЛЮЧЕНИЕ
Метод сопряженных градиентов формирует направления поиска, в большей мере соответствующие геометрии
 Счастливый случай. 7 класс
Счастливый случай. 7 класс Педагогические, теоретические и практические аспекты проблемы ЕГЭ. Решение задания 13 ЕГЭ - 2016
Педагогические, теоретические и практические аспекты проблемы ЕГЭ. Решение задания 13 ЕГЭ - 2016 Подготовка к ЕГЭ
Подготовка к ЕГЭ Решение задач. Касательная к окружности
Решение задач. Касательная к окружности Центральные углы и углы, вписанные в окружность
Центральные углы и углы, вписанные в окружность Уравнение окружности и прямой
Уравнение окружности и прямой Решение задач С1 3-мя способами
Решение задач С1 3-мя способами Урок в 5 классе тема «Умножение десятичных дробей»
Урок в 5 классе тема «Умножение десятичных дробей»  Площадь криволинейной трапеции
Площадь криволинейной трапеции Урок математики 4 «А» класс Учитель Гондак О.В.
Урок математики 4 «А» класс Учитель Гондак О.В.  Математические модели
Математические модели Дробные выражения. Устный счет
Дробные выражения. Устный счет Презентация по математике "Фалес" - скачать
Презентация по математике "Фалес" - скачать  Линейные фракталы
Линейные фракталы Линейная независимость
Линейная независимость Выражения. Решение задач
Выражения. Решение задач Полуправильные многогранники
Полуправильные многогранники Область истинности выражения
Область истинности выражения МОУ СОШ № 256 г.Фокино Каратанова Марина Николаевна __
МОУ СОШ № 256 г.Фокино Каратанова Марина Николаевна __ Подобие треугольников
Подобие треугольников График линейного уравнения с двумя переменными
График линейного уравнения с двумя переменными Скалярное произведение векторов
Скалярное произведение векторов Производная и дифференциал. Техника дифференцирования элементарных функций
Производная и дифференциал. Техника дифференцирования элементарных функций Решение задач разными способами
Решение задач разными способами Гипербола. Кривая второго порядка
Гипербола. Кривая второго порядка Решение задач с использованием признаков равенства треугольников
Решение задач с использованием признаков равенства треугольников Сумма n-первых членов арифметической прогрессии
Сумма n-первых членов арифметической прогрессии Теория систем. Система. Классификация систем. (Тема 3)
Теория систем. Система. Классификация систем. (Тема 3)