- Применение осевой симметрии в жизни

Содержание
- 2. Содержание: Осевая симметрия Теорема
- 3. Симметрия – (от греч.) соразмерность, пропорциональность, одинаковость в расположении частей. Виды симметрии: 1. осевая симметрия 2.
- 4. Осевой симметрией с осью a называется такое отображение пространства на себя, при котором любая точка M
- 5. Докажем , что осевая симметрия есть движение.
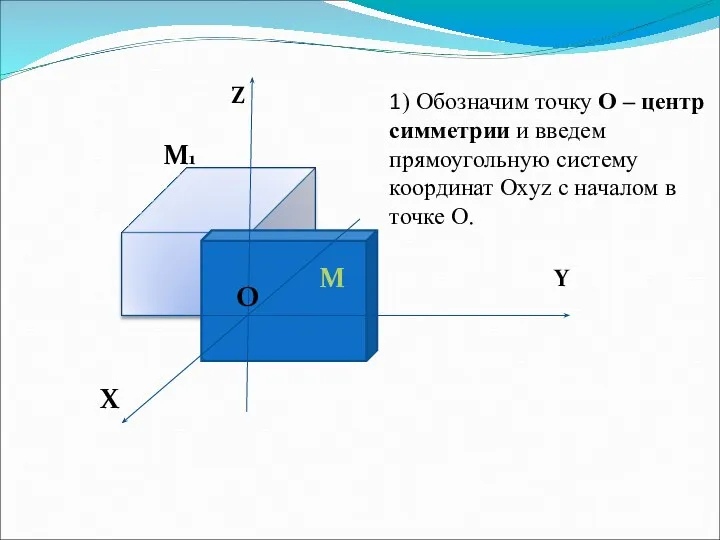
- 6. Z Y X O O M M1 1) Обозначим точку О – центр симметрии и введем
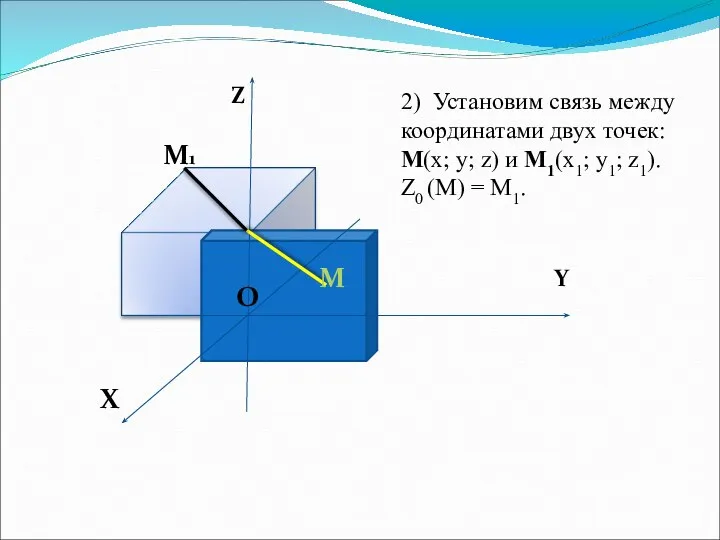
- 7. Z Y X O O M M1 2) Установим связь между координатами двух точек: M(x; y;
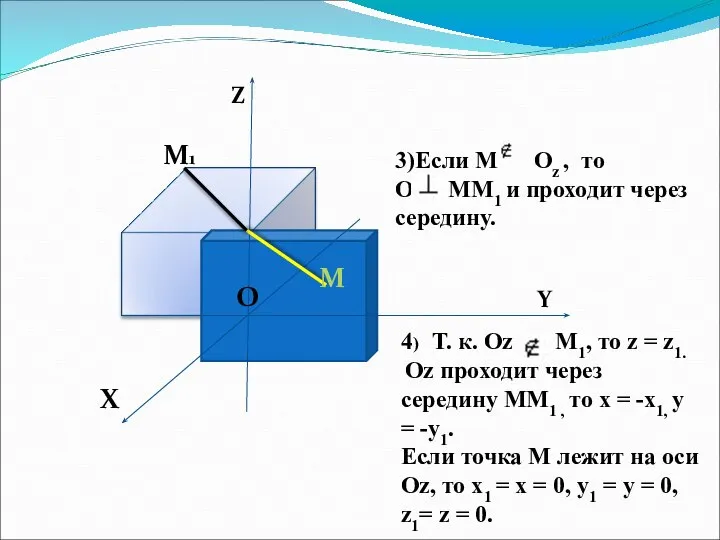
- 8. Z Y X O O M M1 3)Если М Оz , то Оz ММ1 и проходит
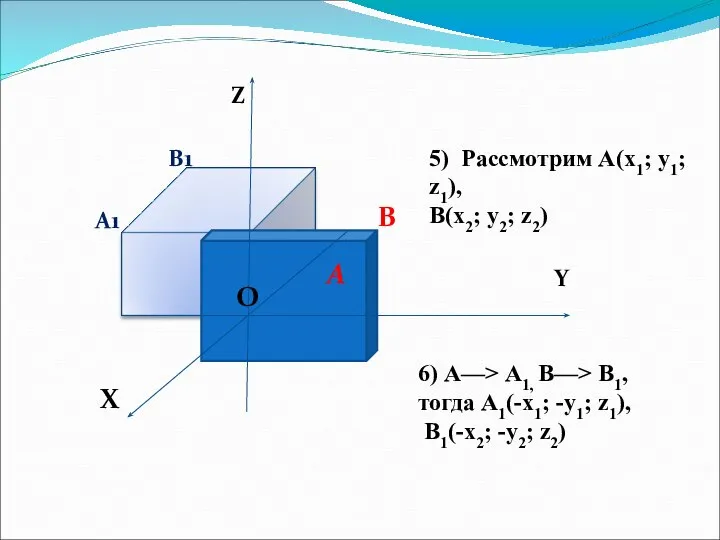
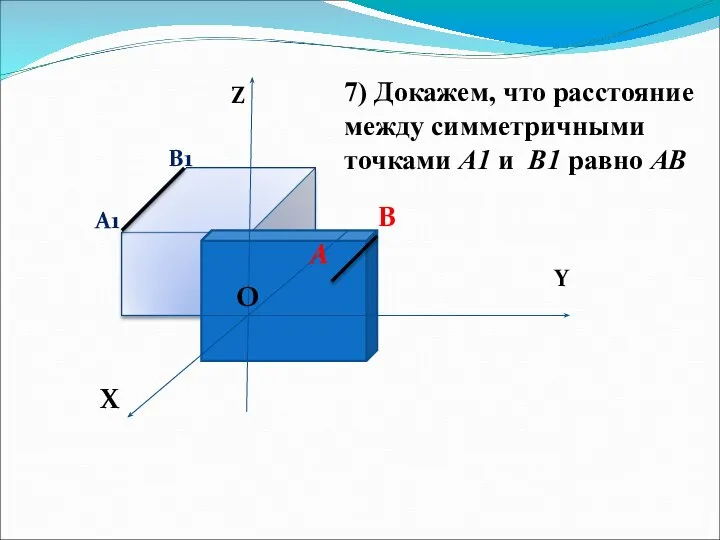
- 9. Z Y X O O A B A1 B1 5) Рассмотрим А(x1; y1; z1), В(x2; y2;
- 10. Z Y X O O A B A1 B1 тогда АВ=А1В1, т.е. Sоz - движение. 7)
- 11. По формуле расстояния между двумя точками находим : тогда АВ=А1В1, т.е. Sоz - движение. тогда АВ=А1В1,
- 16. Скачать презентацию
Содержание:
Осевая симметрия
Теорема
Содержание:
Осевая симметрия
Теорема
Симметрия – (от греч.) соразмерность, пропорциональность, одинаковость в расположении частей.
Виды симметрии:
1.
Симметрия – (от греч.) соразмерность, пропорциональность, одинаковость в расположении частей.
Виды симметрии:
1.
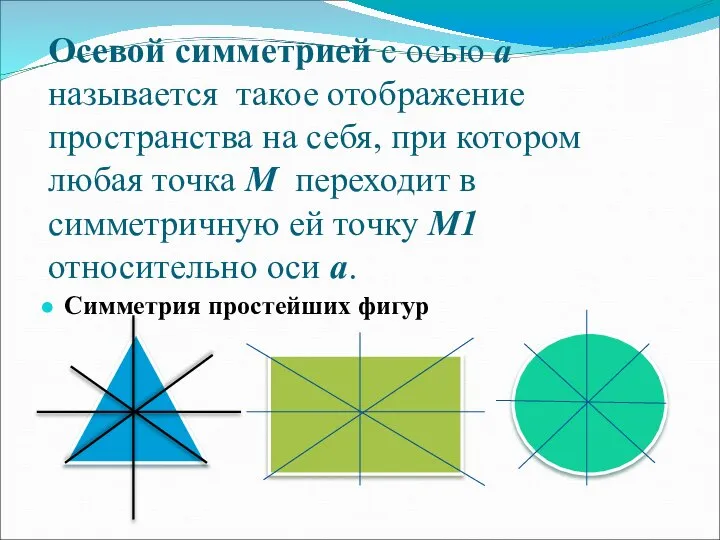
Осевой симметрией с осью a называется такое отображение пространства на себя,
Осевой симметрией с осью a называется такое отображение пространства на себя,
Докажем , что осевая симметрия есть движение.
Докажем , что осевая симметрия есть движение.
Z
Y
X
O
O
M
M1
1) Обозначим точку О – центр симметрии и введем прямоугольную систему
Z
Y
X
O
O
M
M1
1) Обозначим точку О – центр симметрии и введем прямоугольную систему
Z
Y
X
O
O
M
M1
2) Установим связь между координатами двух точек:
M(x; y; z) и M1(x1;
Z
Y
X
O
O
M
M1
2) Установим связь между координатами двух точек:
M(x; y; z) и M1(x1;
Z
Y
X
O
O
M
M1
3)Если М Оz , то Оz ММ1 и проходит через середину.
4) Т. к.
Z
Y
X
O
O
M
M1
3)Если М Оz , то Оz ММ1 и проходит через середину.
4) Т. к.
Z
Y
X
O
O
A
B
A1
B1
5) Рассмотрим А(x1; y1; z1),
В(x2; y2; z2)
6) А—> А1, В—> В1,
Z
Y
X
O
O
A
B
A1
B1
5) Рассмотрим А(x1; y1; z1),
В(x2; y2; z2)
6) А—> А1, В—> В1,
Z
Y
X
O
O
A
B
A1
B1
тогда АВ=А1В1, т.е. Sоz - движение.
7) Докажем, что расстояние между симметричными
Z
Y
X
O
O
A
B
A1
B1
тогда АВ=А1В1, т.е. Sоz - движение.
7) Докажем, что расстояние между симметричными
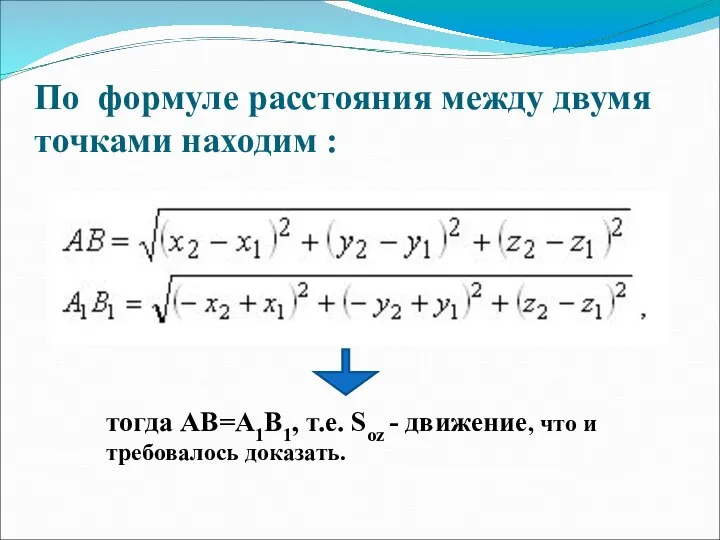
По формуле расстояния между двумя точками находим :
тогда АВ=А1В1,
По формуле расстояния между двумя точками находим :
тогда АВ=А1В1,


 Основные понятия математической статистики
Основные понятия математической статистики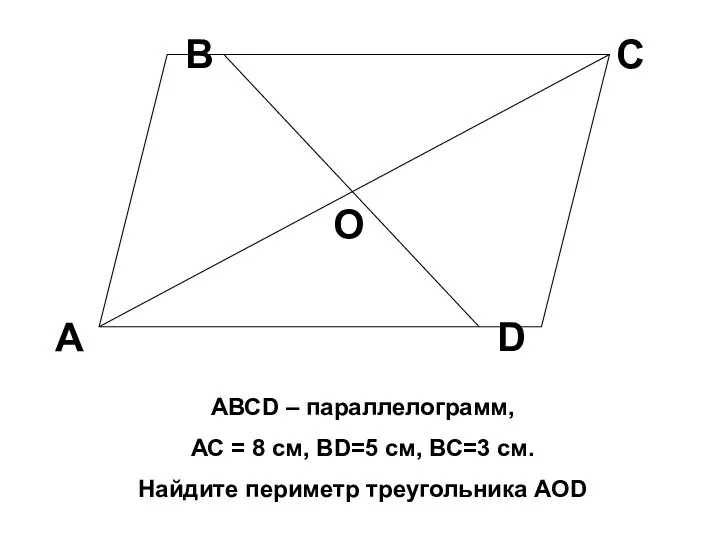 АВСD – параллелограмм
АВСD – параллелограмм Чтение графиков. Тренажер
Чтение графиков. Тренажер Взаимное расположение прямой и окружности ЛАДАНОВА И.В. МКОУ «ВЕРХ-ЖИЛИНСКАЯ ООШ»
Взаимное расположение прямой и окружности ЛАДАНОВА И.В. МКОУ «ВЕРХ-ЖИЛИНСКАЯ ООШ»  Арифметический квадратный корень
Арифметический квадратный корень Графический метод решения системы уравнений с двумя переменными. 7 класс
Графический метод решения системы уравнений с двумя переменными. 7 класс Коэффициенты уравнения
Коэффициенты уравнения Презентация по математике Квадрат и куб числа.
Презентация по математике Квадрат и куб числа.  Элементы векторной алгебры и аналитической геометрии
Элементы векторной алгебры и аналитической геометрии Точки перегиба
Точки перегиба Единицы измерений
Единицы измерений Призма. Поверхность призмы. Параллелепипед. Куб. Поверхность параллелепипеда
Призма. Поверхность призмы. Параллелепипед. Куб. Поверхность параллелепипеда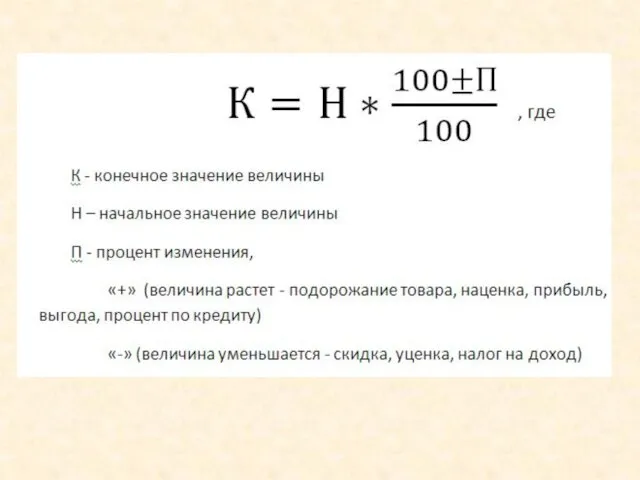 Решение задач на проценты
Решение задач на проценты Архитектура и геометрия
Архитектура и геометрия Примеры столбиком
Примеры столбиком Код Церетели
Код Церетели Второй признак равенства треугольников
Второй признак равенства треугольников Functions and graphs. Chapter 2. Combinations of functions; composite functions
Functions and graphs. Chapter 2. Combinations of functions; composite functions Переход к новому основанию логарифма
Переход к новому основанию логарифма Презентация по математике "Приключения мушкетеров. Решение логических задач" - скачать
Презентация по математике "Приключения мушкетеров. Решение логических задач" - скачать  «Математическая викторина» Для 5 – 6 классов
«Математическая викторина» Для 5 – 6 классов  Площади круга
Площади круга Неравенства второй степени с одной переменной
Неравенства второй степени с одной переменной Координатная плоскость
Координатная плоскость Элементы статистики
Элементы статистики Уравнение. (2 класс)
Уравнение. (2 класс) Проценты. 5 класс. Урок № 2
Проценты. 5 класс. Урок № 2 Аттестационная работа. Программа элективного курса по математике для 5-6 классов Наглядная геометрия
Аттестационная работа. Программа элективного курса по математике для 5-6 классов Наглядная геометрия