- Лабораторная работа №3. Планирование экспериментов применительно к объекту исследований

Содержание
- 2. 1. Анализ объекта исследований 1.1. Цель исследования: синтез оптимальных управлений движением виброизолированного упругого манипулятора, работающего в
- 3. 2. Описание откликов и факторов Факторы (входные и управляющие переменные) Отклик (выходная переменная) Виброизолированный упругий манипулятор
- 4. 3. Описание плана эксперимента 3.1. Уровни факторов (качественные значения) Рассмотрим 3 фактора: 1. Случайные воздействия в
- 5. 3.2. План эксперимента (комбинация уровней факторов) «Латинский квадрат» Параметры системы виброизоляции
- 7. Скачать презентацию
1. Анализ объекта исследований
1.1. Цель исследования:
синтез оптимальных управлений движением виброизолированного
1. Анализ объекта исследований
1.1. Цель исследования:
синтез оптимальных управлений движением виброизолированного
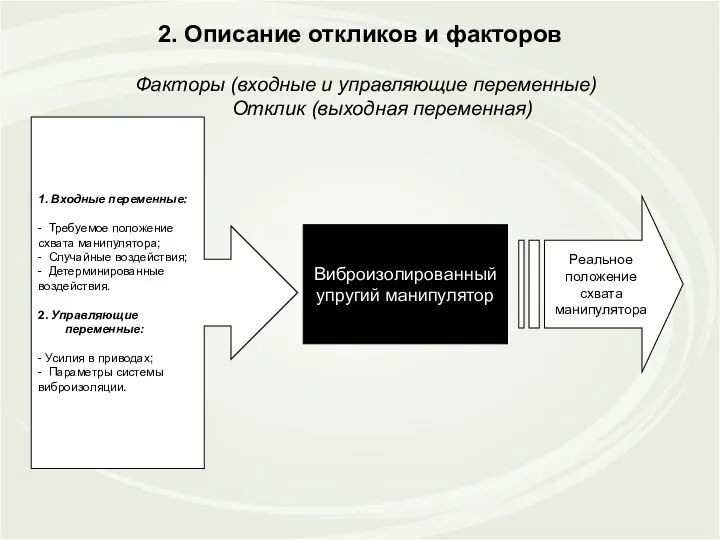
2. Описание откликов и факторов
Факторы (входные и управляющие переменные)
Отклик
2. Описание откликов и факторов Факторы (входные и управляющие переменные) Отклик
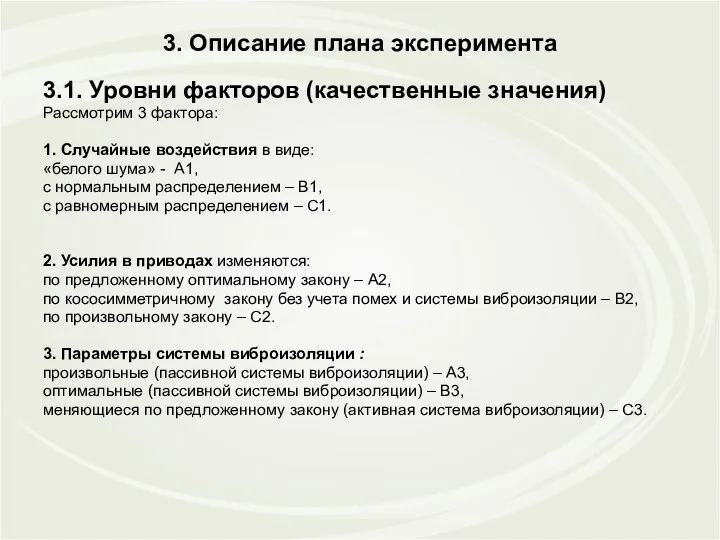
3. Описание плана эксперимента
3.1. Уровни факторов (качественные значения)
Рассмотрим 3 фактора:
1. Случайные
3. Описание плана эксперимента
3.1. Уровни факторов (качественные значения)
Рассмотрим 3 фактора:
1. Случайные
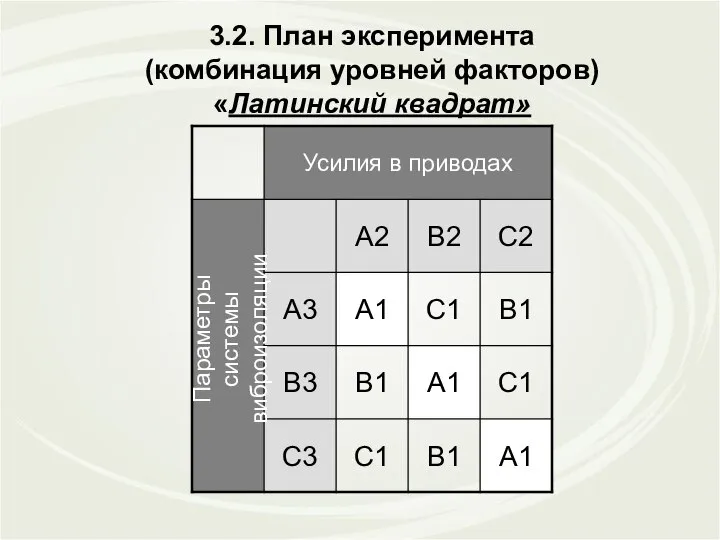
3.2. План эксперимента
(комбинация уровней факторов)
«Латинский квадрат»
Параметры системы
виброизоляции
3.2. План эксперимента
(комбинация уровней факторов)
«Латинский квадрат»
Параметры системы
виброизоляции
 Нормоконтроль. Общие рекомендации студенту-дипломнику по оформлению дипломных и курсовых работ
Нормоконтроль. Общие рекомендации студенту-дипломнику по оформлению дипломных и курсовых работ Путешествие по периодической системе. Интеллектуальная игра для учащихся 8 классов
Путешествие по периодической системе. Интеллектуальная игра для учащихся 8 классов Урок обобщения материала по теме Образование
Урок обобщения материала по теме Образование Научное общество школьников Северное сияние
Научное общество школьников Северное сияние Курсовая работа. Макет
Курсовая работа. Макет Кировский многопрофильный техникум. Организация образовательного процесса с применением электронного обучения
Кировский многопрофильный техникум. Организация образовательного процесса с применением электронного обучения Программа ОткрытиЯ
Программа ОткрытиЯ Организация научного исследования в области дошкольного образования на уровне магистерской диссертации
Организация научного исследования в области дошкольного образования на уровне магистерской диссертации Проект программы развития факультета государственного и муниципального управления СЗИУ РАНХиГС
Проект программы развития факультета государственного и муниципального управления СЗИУ РАНХиГС Обучение по охране труда для руководителей и специалистов и работников склада с учётом новых требований законодательства
Обучение по охране труда для руководителей и специалистов и работников склада с учётом новых требований законодательства Рекомендации по написанию, оформлению и защите научноисследовательской работы
Рекомендации по написанию, оформлению и защите научноисследовательской работы Аттестационная работа. Планирование работы школы с одаренными детьми
Аттестационная работа. Планирование работы школы с одаренными детьми Правила по аттестации школ
Правила по аттестации школ Логика региональных научных исследований
Логика региональных научных исследований ГОУ ВПО Донецкий национальный университет. Биологический факультет. Кафедра биофизики
ГОУ ВПО Донецкий национальный университет. Биологический факультет. Кафедра биофизики Аттестационная работа. Здоровый ребёнок - успешный ребёнок. Внеурочная деятельность по ФГОС НОО и ООО
Аттестационная работа. Здоровый ребёнок - успешный ребёнок. Внеурочная деятельность по ФГОС НОО и ООО Актуальные вопросы по разработке регионального репозитория
Актуальные вопросы по разработке регионального репозитория Аттестационная работа. Образовательная программа дополнительного образования. Художественное ковроделие. (5-7 класс)
Аттестационная работа. Образовательная программа дополнительного образования. Художественное ковроделие. (5-7 класс) День работников рекламы
День работников рекламы Постановка задачи: техника короткий ИКС. Вебинар №3
Постановка задачи: техника короткий ИКС. Вебинар №3 Федеральные государственные образовательные стандарты
Федеральные государственные образовательные стандарты Лицей №7. Дзержинский район города Волгограда
Лицей №7. Дзержинский район города Волгограда Аттестационная работа. Рекомендации к планированию исследовательской работы
Аттестационная работа. Рекомендации к планированию исследовательской работы Криминалистические средства доказывания
Криминалистические средства доказывания Республиканский молодёжный образовательный форум ДОСТОЯНИЕ РЕСПУБЛИКИ-2016
Республиканский молодёжный образовательный форум ДОСТОЯНИЕ РЕСПУБЛИКИ-2016 Зовнішнє незалежне оцінювання. Українська мова і література
Зовнішнє незалежне оцінювання. Українська мова і література Мониторинг качества образовательного процесса
Мониторинг качества образовательного процесса Аттестационная работа. Образовательная программа Мир вокруг нас
Аттестационная работа. Образовательная программа Мир вокруг нас