- Алгоритмы траекторной обработки данных

Содержание
- 2. ОСНОВНЫЕ ПОНЯТИЯ ТРАЕКТОРНОЙ ОБРАБОТКИ ДАННЫХ Отметка радара Траектория Строб Канал автосопровождения Мультирадарные траектории Алгоритмы сопровождения целей
- 3. Отметка радара соответствует обнаружению объекта радаром в определенный момент времени. Отметка несет информацию: о координатах обнаруженного
- 4. Траектория представляет из себя набор: информации о параметрах движения цели (координаты, скорость, курс, высоту, ускорение); дополнительных
- 5. СТРОБ - ограниченная область пространства, в которой с заданной вероятностью ожидается появление ВС Строб используют для
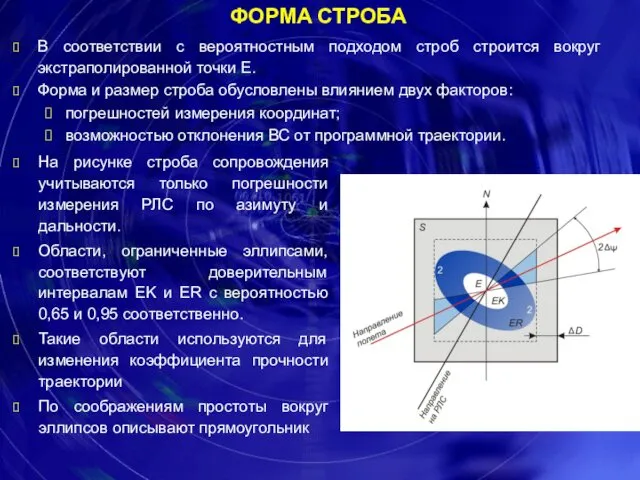
- 6. ФОРМА СТРОБА В соответствии с вероятностным подходом строб строится вокруг экстраполированной точки Е. Форма и размер
- 7. Строб предназначен для привязки пришедшей отметки радара к существующей траектории. Строб содержит - сведения об области
- 8. ИДЕНТИФИКАЦИЯ ОТМЕТОК И РАЗРЕШЕНИЕ СПОРНЫХ СИТУАЦИЙ
- 9. СТРОБ МАНЕВРА
- 10. АВТОЗАХВАТ И СОПРОВОЖДЕНИЕ ЦЕЛИ
- 11. КАНАЛ АВТОСОПРОВОЖДЕНИЯ Автосопровождение - процесс последовательного наблюдения за движением отдельного объекта (цели). В процессе сопровождения вся
- 12. СОСТАВ КАНАЛА АВТОСОПРОВОЖДЕНИЯ номер формуляра; оценки координат (точечные, интервальные); оценки параметров движения (скорости, путевого угла и
- 13. АЛГОРИТМ СОПРОВОЖДЕНИЯ ТРАЕКТОРИЙ
- 14. Установлен следующий порядок проверки стробов на попадание отметки: строб маневра (больший по объему) – определение принадлежности
- 15. Траектория нулевого цикла переводится в режим захвата с приходом в ее строб второй отметки. Особенность траекторий
- 16. Применяется для обеспечения стабильного сопровождения ВС путем анализа информации, поступающей сразу от нескольких радаров. В реальных
- 17. Мультирадарная траектория представляет собой совокупность нескольких обычных траекторий, которые были отнесены к одному и тому же
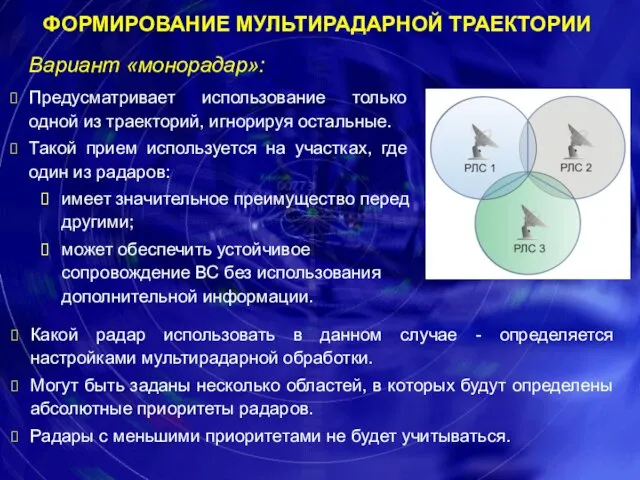
- 18. Вариант «монорадар»: Предусматривает использование только одной из траекторий, игнорируя остальные. Такой прием используется на участках, где
- 19. Вариант «виртуальный радар»: Суть метода состоит в сочетании независимой обработки информации от каждого отдельного источника и
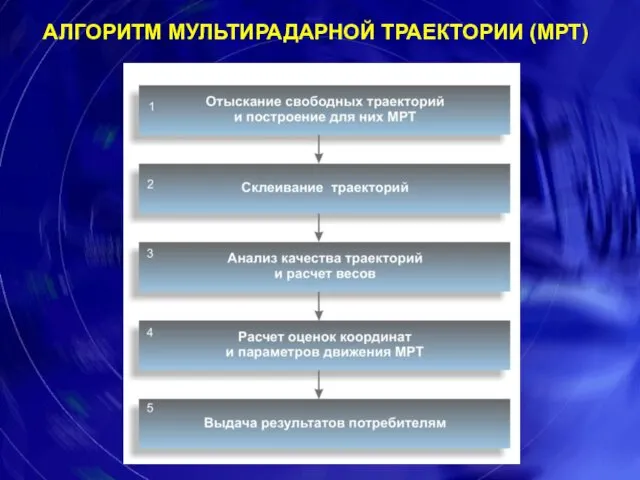
- 20. АЛГОРИТМ МУЛЬТИРАДАРНОЙ ТРАЕКТОРИИ (МРТ)
- 21. ПОЯСНЕНИЮ К АЛГОРИТМУ МРТ Выполняется поиск простых траекторий от реальных радаров, которые не привязаны ни к
- 22. ПОСТРОЕНИЕ МУЛЬТИРАДАРНОЙ ТРАЕКТОРИИ
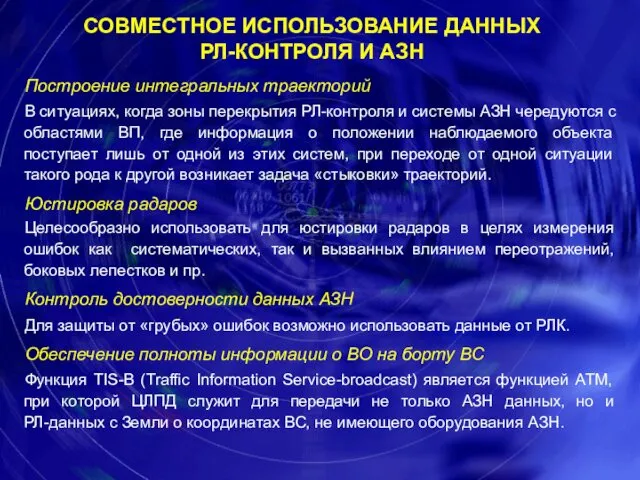
- 23. СОВМЕСТНОЕ ИСПОЛЬЗОВАНИЕ ДАННЫХ РЛ-КОНТРОЛЯ И АЗН Построение интегральных траекторий В ситуациях, когда зоны перекрытия РЛ-контроля и
- 24. МОДИФИЦИРОВАННЫЙ α - β ФИЛЬТР - реальные ; - сглаженные ; x x0 x1 x2 x3
- 25. СКОЛЬЗЯЩЕЕ СГЛАЖИВАНИЕ ПО α-β ФИЛЬТРУ
- 26. ЗАВИСИМОСТЬ КОЭФФИЦИЕНТА СГЛАЖИВАНИЯ КООРДИНАТ ОТ ЧИСЛА НАБЛЮДЕНИЙ
- 27. ЗАВИСИМОСТЬ КОЭФФИЦИЕНТА СГЛАЖИВАНИЯ СКОРОСТИ ОТ ЧИСЛА НАБЛЮДЕНИЙ
- 28. ФОРМАЛЬНОЕ ОПРЕДЕЛЕНИЕ ИМ
- 30. ПОСТРОЕНИЕ ИМ x
- 31. МНОЖЕСТВО ПРОГНОЗА И МНОЖЕСТВО НЕОПРЕДЕЛЕННОСТИ ЗАМЕРА
- 32. СРЫВ СОПРОВОЖДЕНИЯ
- 33. АЛГОРИТМ ПОСТРОЕНИЯ ИНФОРМАЦИОННОЙ ТРУБКИ Нет Нет Да Нет Да Начало Ввод исходных данных Ввод очередного замера
- 34. ЗАДАЧА ОБНАРУЖЕНИЯ ПКС I1 I2
- 35. НОВЫЕ МЕТОДЫ МУЛЬТИСЕНСОРНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ИМ
- 36. НОВЫЕ МЕТОДЫ МУЛЬТИСЕНСОРНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ИМ
- 38. Скачать презентацию
ОСНОВНЫЕ ПОНЯТИЯ
ТРАЕКТОРНОЙ ОБРАБОТКИ ДАННЫХ
Отметка радара
Траектория
Строб
Канал автосопровождения
Мультирадарные траектории
Алгоритмы сопровождения целей
ОСНОВНЫЕ ПОНЯТИЯ
ТРАЕКТОРНОЙ ОБРАБОТКИ ДАННЫХ
Отметка радара
Траектория
Строб
Канал автосопровождения
Мультирадарные траектории
Алгоритмы сопровождения целей
Отметка радара соответствует обнаружению объекта радаром в определенный момент времени.
Отметка несет
Отметка радара соответствует обнаружению объекта радаром в определенный момент времени.
Отметка несет
Траектория представляет из себя набор:
информации о параметрах движения цели
(координаты, скорость,
Траектория представляет из себя набор:
информации о параметрах движения цели
(координаты, скорость,
СТРОБ - ограниченная область пространства, в которой с заданной вероятностью ожидается
СТРОБ - ограниченная область пространства, в которой с заданной вероятностью ожидается
ФОРМА СТРОБА
В соответствии с вероятностным подходом строб строится вокруг экстраполированной точки
ФОРМА СТРОБА
В соответствии с вероятностным подходом строб строится вокруг экстраполированной точки
Строб предназначен для привязки пришедшей отметки радара к существующей траектории.
Строб содержит
Строб предназначен для привязки пришедшей отметки радара к существующей траектории.
Строб содержит
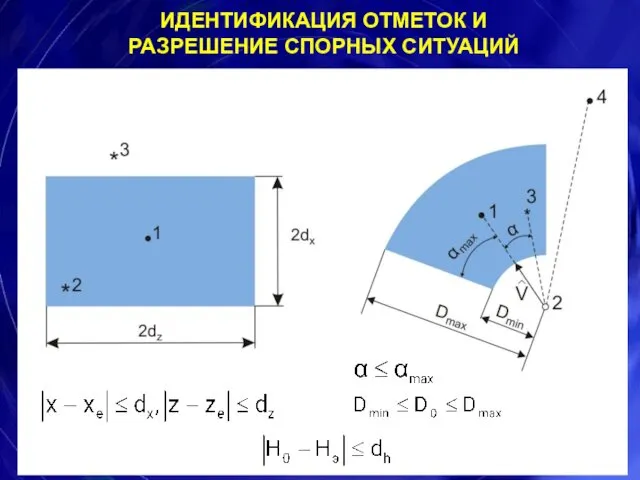
ИДЕНТИФИКАЦИЯ ОТМЕТОК И
РАЗРЕШЕНИЕ СПОРНЫХ СИТУАЦИЙ
ИДЕНТИФИКАЦИЯ ОТМЕТОК И
РАЗРЕШЕНИЕ СПОРНЫХ СИТУАЦИЙ
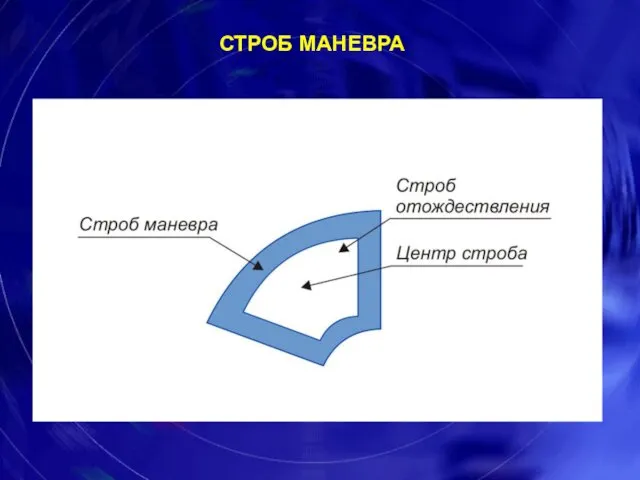
СТРОБ МАНЕВРА
СТРОБ МАНЕВРА

АВТОЗАХВАТ И СОПРОВОЖДЕНИЕ ЦЕЛИ
АВТОЗАХВАТ И СОПРОВОЖДЕНИЕ ЦЕЛИ
КАНАЛ АВТОСОПРОВОЖДЕНИЯ
Автосопровождение - процесс последовательного наблюдения за движением отдельного объекта (цели).
В
КАНАЛ АВТОСОПРОВОЖДЕНИЯ
Автосопровождение - процесс последовательного наблюдения за движением отдельного объекта (цели).
В
СОСТАВ КАНАЛА АВТОСОПРОВОЖДЕНИЯ
номер формуляра;
оценки координат (точечные, интервальные);
оценки параметров движения (скорости, путевого
СОСТАВ КАНАЛА АВТОСОПРОВОЖДЕНИЯ
номер формуляра;
оценки координат (точечные, интервальные);
оценки параметров движения (скорости, путевого

АЛГОРИТМ СОПРОВОЖДЕНИЯ ТРАЕКТОРИЙ
АЛГОРИТМ СОПРОВОЖДЕНИЯ ТРАЕКТОРИЙ
Установлен следующий порядок проверки стробов на попадание отметки:
строб маневра (больший по
Установлен следующий порядок проверки стробов на попадание отметки:
строб маневра (больший по
Траектория нулевого цикла переводится в режим захвата с приходом в ее
Траектория нулевого цикла переводится в режим захвата с приходом в ее
Применяется для обеспечения стабильного сопровождения ВС путем анализа информации, поступающей сразу
Применяется для обеспечения стабильного сопровождения ВС путем анализа информации, поступающей сразу

Мультирадарная траектория представляет собой совокупность нескольких обычных траекторий, которые были отнесены
Мультирадарная траектория представляет собой совокупность нескольких обычных траекторий, которые были отнесены
Вариант «монорадар»:
Предусматривает использование только одной из траекторий, игнорируя остальные.
Такой прием
Вариант «монорадар»:
Предусматривает использование только одной из траекторий, игнорируя остальные.
Такой прием
Вариант «виртуальный радар»:
Суть метода состоит в сочетании независимой обработки информации
Вариант «виртуальный радар»:
Суть метода состоит в сочетании независимой обработки информации
АЛГОРИТМ МУЛЬТИРАДАРНОЙ ТРАЕКТОРИИ (МРТ)
АЛГОРИТМ МУЛЬТИРАДАРНОЙ ТРАЕКТОРИИ (МРТ)
ПОЯСНЕНИЮ К АЛГОРИТМУ МРТ
Выполняется поиск простых траекторий от реальных радаров, которые
ПОЯСНЕНИЮ К АЛГОРИТМУ МРТ
Выполняется поиск простых траекторий от реальных радаров, которые
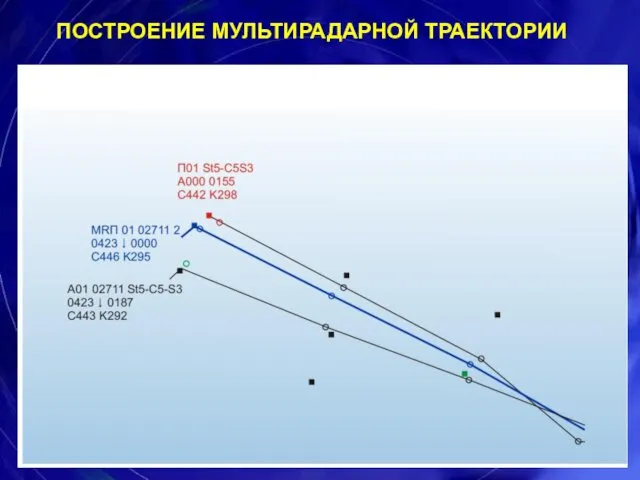
ПОСТРОЕНИЕ МУЛЬТИРАДАРНОЙ ТРАЕКТОРИИ
ПОСТРОЕНИЕ МУЛЬТИРАДАРНОЙ ТРАЕКТОРИИ
СОВМЕСТНОЕ ИСПОЛЬЗОВАНИЕ ДАННЫХ
РЛ-КОНТРОЛЯ И АЗН
Построение интегральных траекторий
В ситуациях, когда
СОВМЕСТНОЕ ИСПОЛЬЗОВАНИЕ ДАННЫХ
РЛ-КОНТРОЛЯ И АЗН
Построение интегральных траекторий
В ситуациях, когда

МОДИФИЦИРОВАННЫЙ α - β ФИЛЬТР
- реальные ;
- сглаженные ;
x
x0
x1
x2
x3
x4
z
z0
z1
z2
z3
z4
t0
t2
t3
t4
V1
V2
-
МОДИФИЦИРОВАННЫЙ α - β ФИЛЬТР
- реальные ;
- сглаженные ;
x
x0
x1
x2
x3
x4
z
z0
z1
z2
z3
z4
t0
t2
t3
t4
V1
V2
-
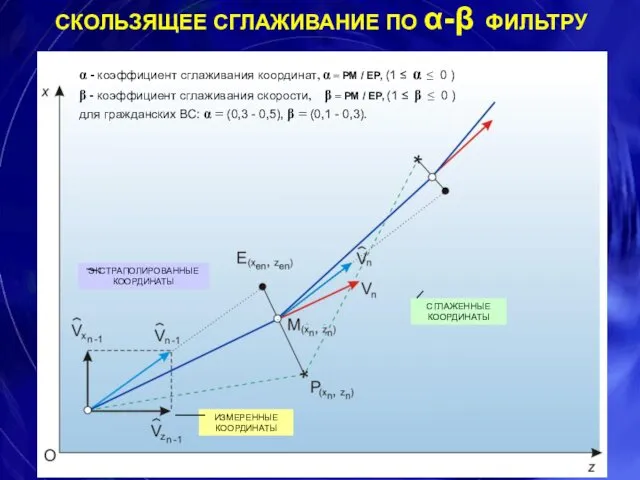
СКОЛЬЗЯЩЕЕ СГЛАЖИВАНИЕ ПО α-β ФИЛЬТРУ
СКОЛЬЗЯЩЕЕ СГЛАЖИВАНИЕ ПО α-β ФИЛЬТРУ

ЗАВИСИМОСТЬ КОЭФФИЦИЕНТА СГЛАЖИВАНИЯ КООРДИНАТ ОТ ЧИСЛА НАБЛЮДЕНИЙ
ЗАВИСИМОСТЬ КОЭФФИЦИЕНТА СГЛАЖИВАНИЯ КООРДИНАТ ОТ ЧИСЛА НАБЛЮДЕНИЙ
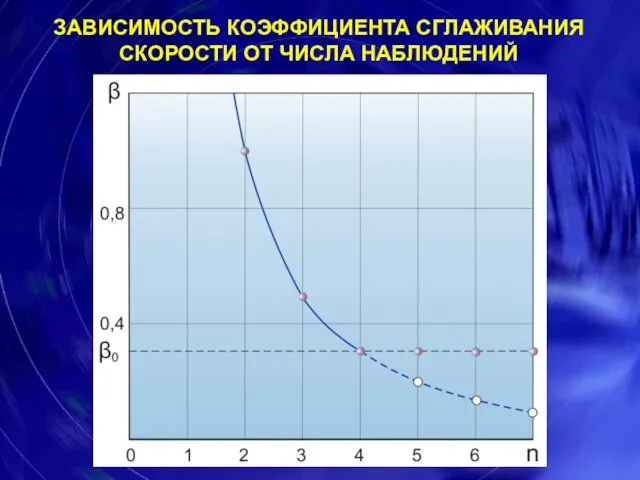
ЗАВИСИМОСТЬ КОЭФФИЦИЕНТА СГЛАЖИВАНИЯ СКОРОСТИ ОТ ЧИСЛА НАБЛЮДЕНИЙ
ЗАВИСИМОСТЬ КОЭФФИЦИЕНТА СГЛАЖИВАНИЯ СКОРОСТИ ОТ ЧИСЛА НАБЛЮДЕНИЙ
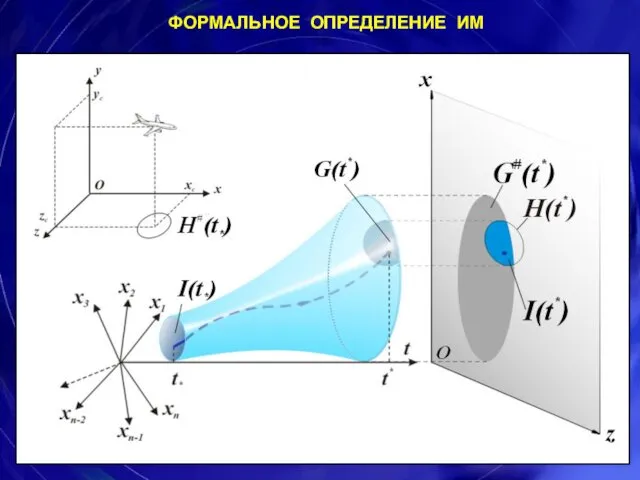
ФОРМАЛЬНОЕ ОПРЕДЕЛЕНИЕ ИМ
ФОРМАЛЬНОЕ ОПРЕДЕЛЕНИЕ ИМ

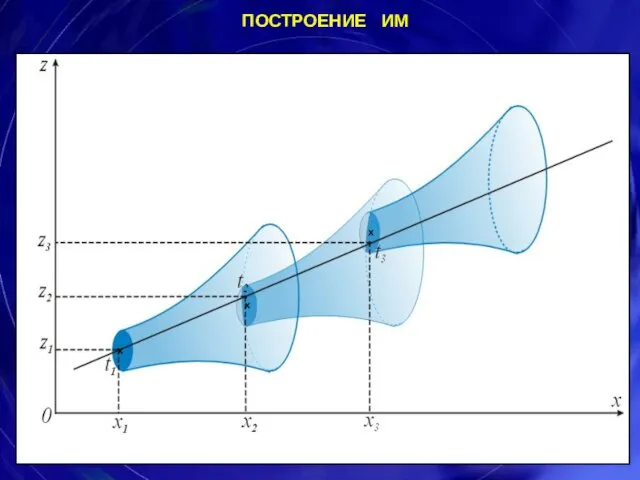
ПОСТРОЕНИЕ ИМ
x
ПОСТРОЕНИЕ ИМ
x
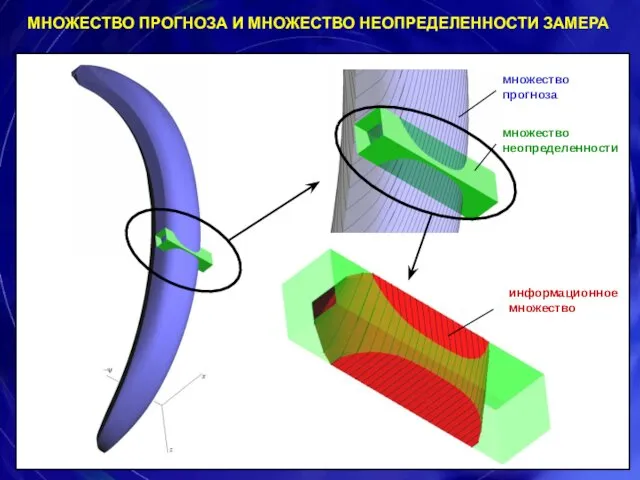
МНОЖЕСТВО ПРОГНОЗА И МНОЖЕСТВО НЕОПРЕДЕЛЕННОСТИ ЗАМЕРА
МНОЖЕСТВО ПРОГНОЗА И МНОЖЕСТВО НЕОПРЕДЕЛЕННОСТИ ЗАМЕРА

СРЫВ СОПРОВОЖДЕНИЯ
СРЫВ СОПРОВОЖДЕНИЯ

АЛГОРИТМ ПОСТРОЕНИЯ ИНФОРМАЦИОННОЙ ТРУБКИ
Нет
Нет
Да
Нет
Да
Начало
Ввод исходных данных
Ввод очередного замера
Замер совместный?
Вычисление статистик
Переход
на
АЛГОРИТМ ПОСТРОЕНИЯ ИНФОРМАЦИОННОЙ ТРУБКИ
Нет
Нет
Да
Нет
Да
Начало
Ввод исходных данных
Ввод очередного замера
Замер совместный?
Вычисление статистик
Переход
на
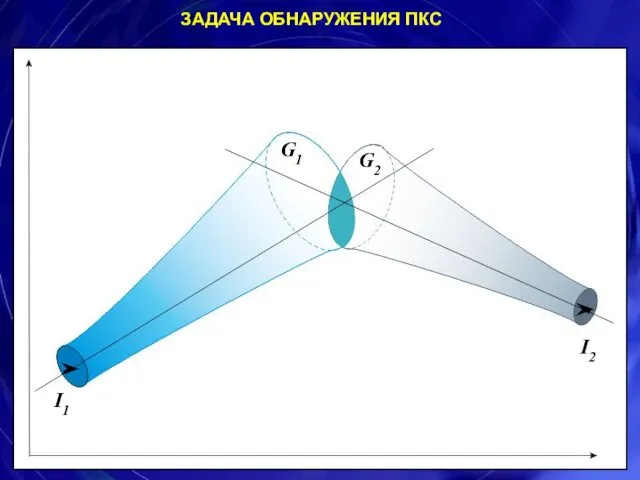
ЗАДАЧА ОБНАРУЖЕНИЯ ПКС
I1
I2
ЗАДАЧА ОБНАРУЖЕНИЯ ПКС
I1
I2

НОВЫЕ МЕТОДЫ МУЛЬТИСЕНСОРНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ИМ
НОВЫЕ МЕТОДЫ МУЛЬТИСЕНСОРНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ИМ
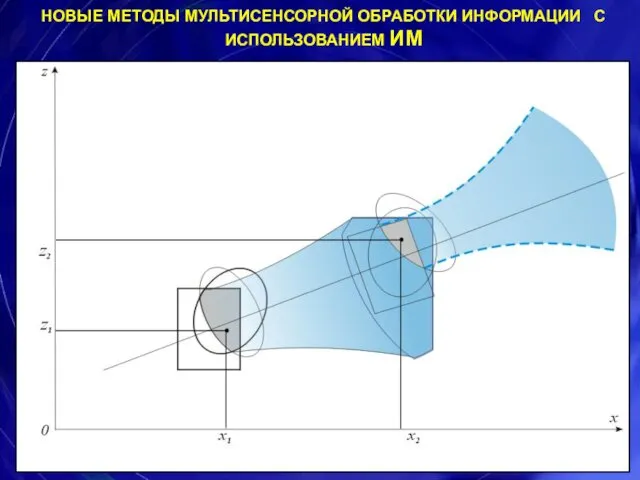
НОВЫЕ МЕТОДЫ МУЛЬТИСЕНСОРНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ИМ
НОВЫЕ МЕТОДЫ МУЛЬТИСЕНСОРНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ИМ
 День правовой помощи детям
День правовой помощи детям _Подача заявления 1 этап
_Подача заявления 1 этап Полезные ископаемые. Нефть
Полезные ископаемые. Нефть Колёсный движитель автомобилей
Колёсный движитель автомобилей Влияние серы на анизотропию пластических конструкционных сталей
Влияние серы на анизотропию пластических конструкционных сталей Семейный альбом 8 б
Семейный альбом 8 б МО 1 заседание
МО 1 заседание Место и роль организации (предприятия, фирмы) в обществе
Место и роль организации (предприятия, фирмы) в обществе Зри в корень!
Зри в корень! 20130906_vneklassnoe_meropriyatie
20130906_vneklassnoe_meropriyatie Значение оздоровительного бега
Значение оздоровительного бега Влияние парфюмерии на беременность
Влияние парфюмерии на беременность Повар-универсал требуется в ресторанную службу на Аватодроме Игора Драйв в Ленинградской области
Повар-универсал требуется в ресторанную службу на Аватодроме Игора Драйв в Ленинградской области Организменный уровень жизни
Организменный уровень жизни Особенности управления экономическими и производственными рисками
Особенности управления экономическими и производственными рисками Оперативное планирование и руководство работой железнодорожной станции. Лекция 8
Оперативное планирование и руководство работой железнодорожной станции. Лекция 8 Отчетный концерт танцевальной студии Звезда
Отчетный концерт танцевальной студии Звезда Холодное сердце
Холодное сердце Maimonides
Maimonides Значение эмоций для формирования положительного взаимодействия ребёнка с окружающим миром
Значение эмоций для формирования положительного взаимодействия ребёнка с окружающим миром Монтаж, эксплуатация и техническое обслуживание аппаратуры защиты и управления до 1000 В
Монтаж, эксплуатация и техническое обслуживание аппаратуры защиты и управления до 1000 В Есенина осень поёт нам песень
Есенина осень поёт нам песень 20170122_poeticheskaya_stranitsa
20170122_poeticheskaya_stranitsa Как стать ТОПовым мастером маникюра? 5 секретов успешного мастера
Как стать ТОПовым мастером маникюра? 5 секретов успешного мастера Портфолио. Васенина Мария Николаевна
Портфолио. Васенина Мария Николаевна Джгаркава О.В. Закаливание
Джгаркава О.В. Закаливание Психолог, методолог, аналитик Сафин Радмир
Психолог, методолог, аналитик Сафин Радмир 20131205_slaydy
20131205_slaydy