- Микродвигатели. Универсальные коллекторные микродвигатели

Содержание
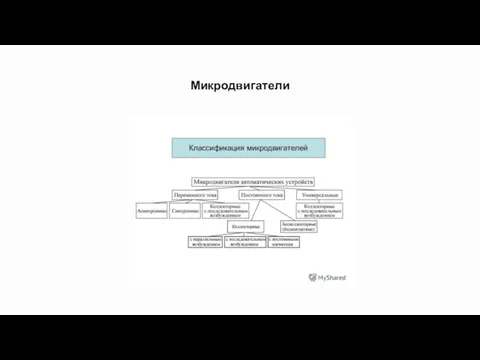
- 2. Микродвигатели
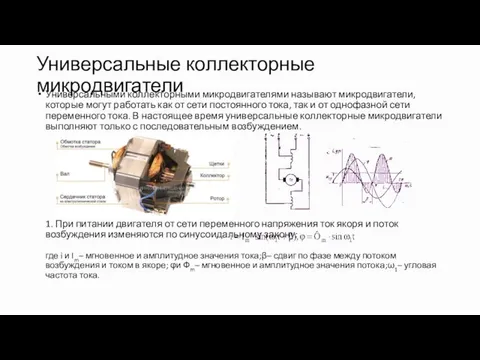
- 3. Универсальные коллекторные микродвигатели Универсальными коллекторными микродвигателями называют микродвигатели, которые могут работать как от сети постоянного тока,
- 4. 2. Характеристики универсального коллекторного микродвигателя при питании от сети переменного тока несколько хуже, чем при питании
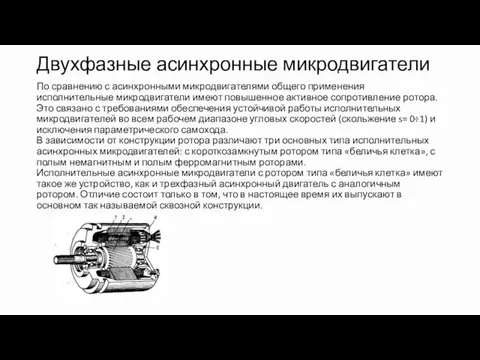
- 5. Двухфазные асинхронные микродвигатели По сравнению с асинхронными микродвигателями общего применения исполнительные микродвигатели имеют повышенное активное сопротивление
- 6. В системах автоматики широко применяются исполнительные микродвигатели с полым немагнитным ротором. Исполнительный микродвигатель АДП-123 с полым
- 7. Гладкая цилиндрическая поверхность полого немагнитного ротора способствует снижению уровня шумов, создаваемых двигателем. Отсутствие радиальных сил притяжения
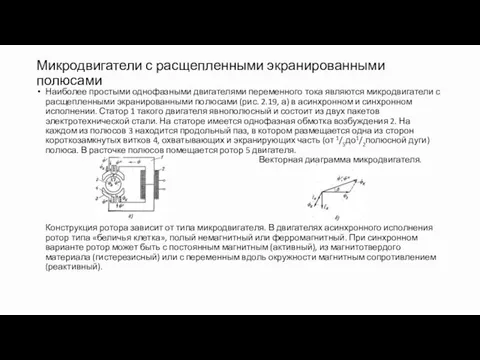
- 8. Микродвигатели с расщепленными экранированными полюсами Наиболее простыми однофазными двигателями переменного тока являются микродвигатели с расщепленными экранированными
- 9. Существенным преимуществом однофазных микродвигателей с расщепленными полюсами кроме простоты конструкции и небольшой стоимости является их надежная
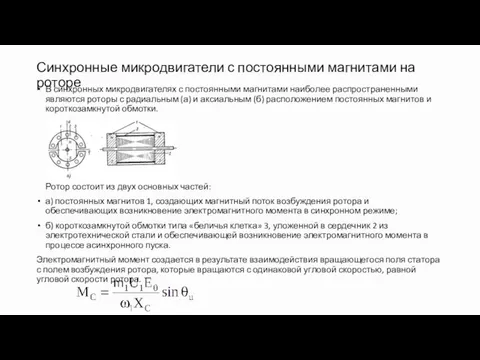
- 10. Синхронные микродвигатели с постоянными магнитами на роторе В синхронных микродвигателях с постоянными магнитами наиболее распространенными являются
- 11. Принцип работы синхронного микродвигателя основан на способности обмотки статора создавать вращающееся магнитное поле. У синхронных микродвигателей
- 12. Гистерезисные микродвигатели Синхронным гистерезисным называют микродвигатель, вращающий момент которого возникает за счет гистерезиса при перемагничивании ротора.
- 13. Возникающий гистерезисный момент пропорционален модулю векторного произведения пространственных векторов магнитного потока ротора Ф2, образованного элементарными магнитиками,
- 14. Шаговые (импульсные) микродвигатели Шаговые (импульсные) двигатели представляют собой синхронные микродвигатели, у которых питание фаз обмотки якоря
- 15. Принцип действия: под воздействием каждого импульса ротор двигателя совершает определенное угловое перемещение, называемое шагом. Коммутатор преобразует
- 16. Лазерный микродвигатель Для прецизионного управления малыми космическими аппаратами массой около 1 кг требуется создать микродвигатели, производящие
- 17. Динамика истечения плазменного факела из зоны абляции, зафиксированная благодаря использованию сверхскоростной регистрации изображений (длительность экспозиции камеры
- 19. Скачать презентацию
Микродвигатели
Микродвигатели
Универсальные коллекторные микродвигатели
Универсальными коллекторными микродвигателями называют микродвигатели, которые могут работать как
Универсальные коллекторные микродвигатели
Универсальными коллекторными микродвигателями называют микродвигатели, которые могут работать как
2. Характеристики универсального коллекторного микродвигателя при питании от сети переменного тока
2. Характеристики универсального коллекторного микродвигателя при питании от сети переменного тока
Двухфазные асинхронные микродвигатели
По сравнению с асинхронными микродвигателями общего применения исполнительные микродвигатели
Двухфазные асинхронные микродвигатели
По сравнению с асинхронными микродвигателями общего применения исполнительные микродвигатели
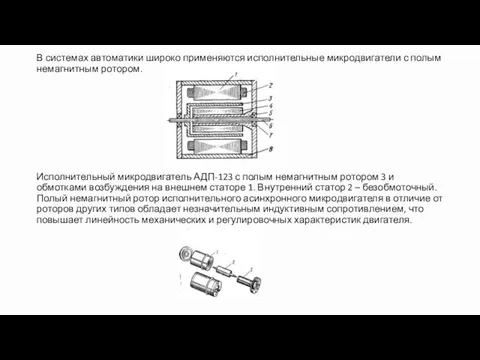
В системах автоматики широко применяются исполнительные микродвигатели с полым немагнитным ротором.
Исполнительный
В системах автоматики широко применяются исполнительные микродвигатели с полым немагнитным ротором. Исполнительный
Гладкая цилиндрическая поверхность полого немагнитного ротора способствует снижению уровня шумов, создаваемых
Гладкая цилиндрическая поверхность полого немагнитного ротора способствует снижению уровня шумов, создаваемых
Микродвигатели с расщепленными экранированными полюсами
Наиболее простыми однофазными двигателями переменного тока являются
Микродвигатели с расщепленными экранированными полюсами
Наиболее простыми однофазными двигателями переменного тока являются

Существенным преимуществом однофазных микродвигателей с расщепленными полюсами кроме простоты конструкции и
Существенным преимуществом однофазных микродвигателей с расщепленными полюсами кроме простоты конструкции и
Синхронные микродвигатели с постоянными магнитами на роторе
В синхронных микродвигателях с постоянными
Синхронные микродвигатели с постоянными магнитами на роторе
В синхронных микродвигателях с постоянными

Принцип работы синхронного микродвигателя основан на способности обмотки статора создавать вращающееся
Принцип работы синхронного микродвигателя основан на способности обмотки статора создавать вращающееся

Гистерезисные микродвигатели
Синхронным гистерезисным называют микродвигатель, вращающий момент которого возникает за счет
Гистерезисные микродвигатели
Синхронным гистерезисным называют микродвигатель, вращающий момент которого возникает за счет

Возникающий гистерезисный момент пропорционален модулю векторного произведения пространственных векторов магнитного потока
Возникающий гистерезисный момент пропорционален модулю векторного произведения пространственных векторов магнитного потока
Шаговые (импульсные) микродвигатели
Шаговые (импульсные) двигатели представляют собой синхронные микродвигатели, у которых
Шаговые (импульсные) микродвигатели
Шаговые (импульсные) двигатели представляют собой синхронные микродвигатели, у которых

Принцип действия: под воздействием каждого импульса ротор двигателя совершает определенное угловое
Принцип действия: под воздействием каждого импульса ротор двигателя совершает определенное угловое
Лазерный микродвигатель
Для прецизионного управления малыми космическими аппаратами массой около 1 кг
Лазерный микродвигатель
Для прецизионного управления малыми космическими аппаратами массой около 1 кг
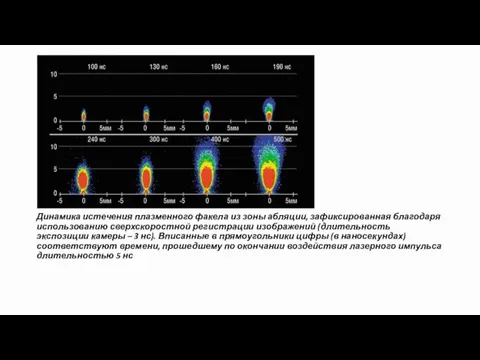
Динамика истечения плазменного факела из зоны абляции, зафиксированная благодаря использованию сверхскоростной
Динамика истечения плазменного факела из зоны абляции, зафиксированная благодаря использованию сверхскоростной
 Слушание музыки 1 класс
Слушание музыки 1 класс Аккумулирование тепла в системах централизованного теплоснабжения
Аккумулирование тепла в системах централизованного теплоснабжения Молитва это беседа с богом
Молитва это беседа с богом Відновлення та гармонійне зростання
Відновлення та гармонійне зростання Мнемоника и физика
Мнемоника и физика Дополнения к онлайн уроку_Template_online_lesson
Дополнения к онлайн уроку_Template_online_lesson 20121009_prezentaciya_k_uroku_istorii
20121009_prezentaciya_k_uroku_istorii Фотокастинг
Фотокастинг Реконструкция территории сквера у гостиницы Урал
Реконструкция территории сквера у гостиницы Урал Организация дистанционного обслуживания: формы, методы, приёмы. Продвижение услуг
Организация дистанционного обслуживания: формы, методы, приёмы. Продвижение услуг Регламент действий при нестандартных и аварийных ситуациях
Регламент действий при нестандартных и аварийных ситуациях Контроль знаний
Контроль знаний Булат Солтангәрәев исемендәге республика премияһы
Булат Солтангәрәев исемендәге республика премияһы Прокладка кабельных линий
Прокладка кабельных линий Обустройство городского стадиона
Обустройство городского стадиона Электрические станции и подстанции
Электрические станции и подстанции Переработка золошлаковых материалов в инновационную продукцию
Переработка золошлаковых материалов в инновационную продукцию ВОЗВРАЩЕНИЕ АШАЛЬЧИ
ВОЗВРАЩЕНИЕ АШАЛЬЧИ Экономика наука и хозяйство
Экономика наука и хозяйство НОВЫЙ КАТАЛОГ БУКЛЕТ (1)
НОВЫЙ КАТАЛОГ БУКЛЕТ (1) Оборудование для приготовления и продажи напитков
Оборудование для приготовления и продажи напитков Рекомендации по штабелированию для ПАО Коблево
Рекомендации по штабелированию для ПАО Коблево Slide one
Slide one Директорное и автоматическое управление боковым траекторным движением при заходе на посадку
Директорное и автоматическое управление боковым траекторным движением при заходе на посадку Методы неразрушающего контроля
Методы неразрушающего контроля Наркотики и дети. Материалы родительского собрания
Наркотики и дети. Материалы родительского собрания Схема расположения мест складирования ж/д колес. Термический участок (Участок, цех)
Схема расположения мест складирования ж/д колес. Термический участок (Участок, цех) День пионерии
День пионерии