Разработка системы управления электропривода трехколесного мобильного робота всенаправленного движения на базе микроконтроллера
- Разработка системы управления электропривода трехколесного мобильного робота всенаправленного движения на базе микроконтроллера

Содержание
- 2. АКТУАЛЬНОСТЬ МОБИЛЬНЫХ РОБОТОВ В СОВРЕМЕННОМ МИРЕ
- 3. Колеса всенаправленного движения
- 4. Целью работы является разработка системы управления электроприводом трехколесного мобильного робота всенаправленного движения. Для достижения данной цели
- 5. Кинематика трехколесного омни-робота Уравнение прямой кинематики Уравнение обратной кинематики
- 6. Функциональная схема контура скорости Функц схем контур скор, исп ваюнг, симулинк
- 7. Обзор приложений Matlab для моделирования роботов Robotics System Toolbox Mobile Robotics Simulation Toolbox
- 8. Разработка аппаратной части
- 9. Разработка аппаратной части
- 10. Принципиальная схема
- 11. Замкнутая система управления
- 12. Первоначальная настройка ПИД-регулятора
- 13. Моделирование движения робота Общий вид модели робота
- 14. Видео движ
- 15. Моделирование планирования траектории движения Модель робота с алгоритмом «Pure Pursuit» Результат моделирования
- 16. Результаты моделирования видео
- 17. Результаты моделирования
- 18. Моделирование разных алгоритмов
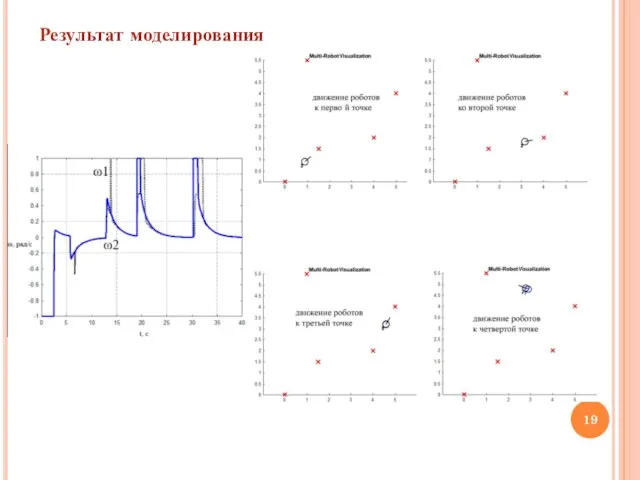
- 19. Результат моделирования
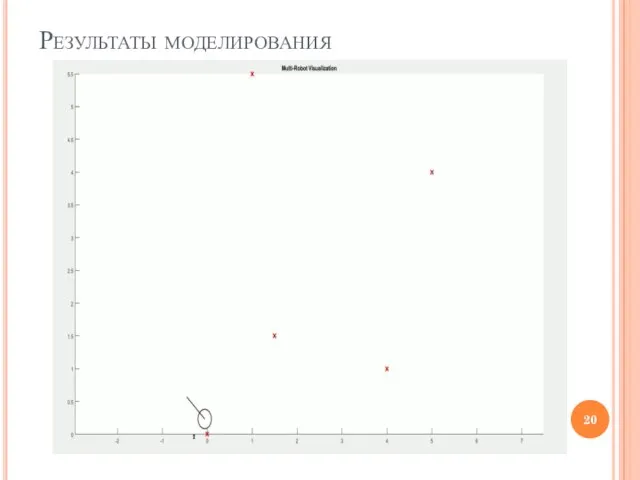
- 20. Результаты моделирования
- 21. Программа для смартфона отладка
- 22. Джойстики Внешний вид программы Настройка передачи задания Настройка возврата джойстика
- 24. Скачать презентацию

АКТУАЛЬНОСТЬ МОБИЛЬНЫХ РОБОТОВ В СОВРЕМЕННОМ МИРЕ
АКТУАЛЬНОСТЬ МОБИЛЬНЫХ РОБОТОВ В СОВРЕМЕННОМ МИРЕ

Колеса всенаправленного движения
Колеса всенаправленного движения
Целью работы является разработка системы управления электроприводом трехколесного мобильного робота всенаправленного
Целью работы является разработка системы управления электроприводом трехколесного мобильного робота всенаправленного
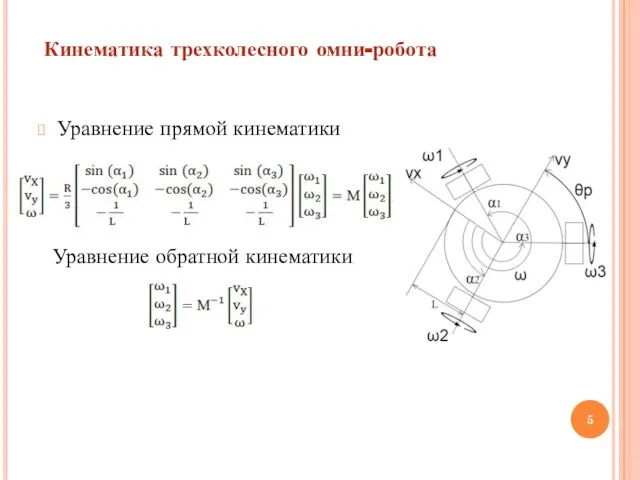
Кинематика трехколесного омни-робота
Уравнение прямой кинематики
Уравнение обратной кинематики
Кинематика трехколесного омни-робота
Уравнение прямой кинематики
Уравнение обратной кинематики
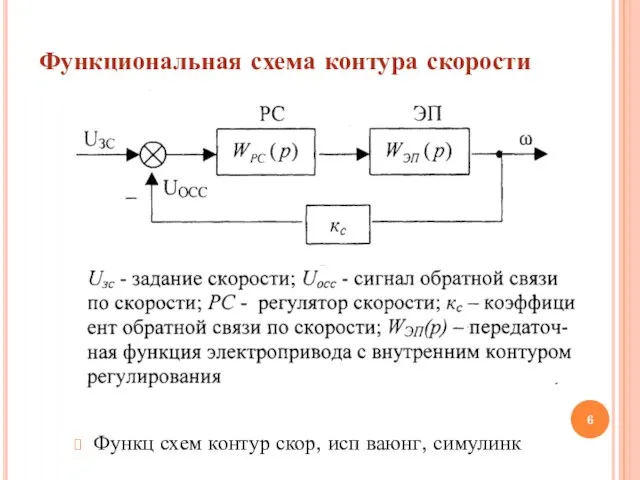
Функциональная схема контура скорости
Функц схем контур скор, исп ваюнг, симулинк
Функциональная схема контура скорости
Функц схем контур скор, исп ваюнг, симулинк
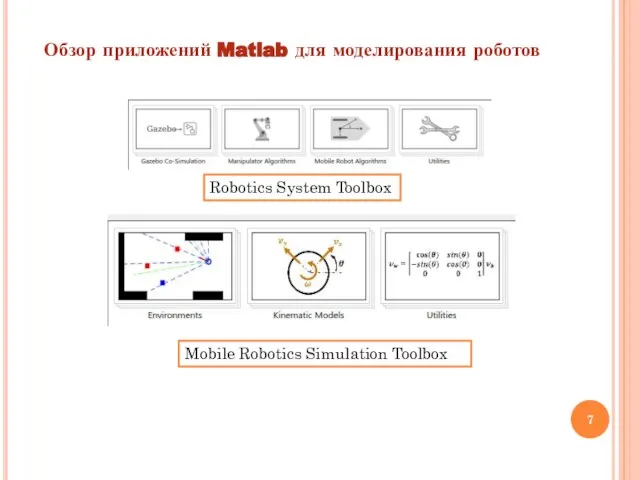
Обзор приложений Matlab для моделирования роботов
Robotics System Toolbox
Mobile Robotics Simulation Toolbox
Обзор приложений Matlab для моделирования роботов
Robotics System Toolbox
Mobile Robotics Simulation Toolbox

Разработка аппаратной части
Разработка аппаратной части

Разработка аппаратной части
Разработка аппаратной части
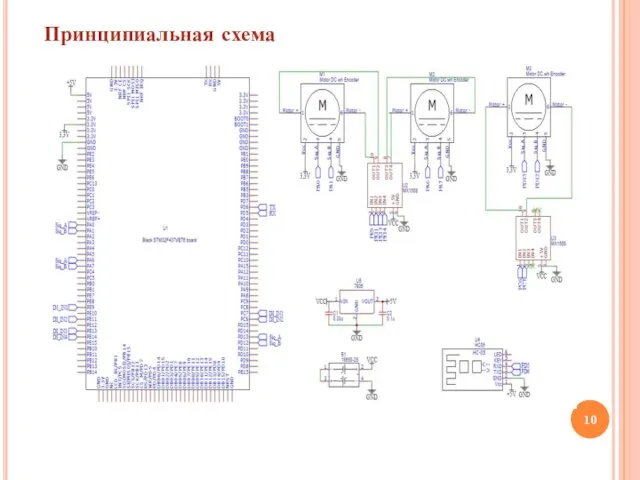
Принципиальная схема
Принципиальная схема
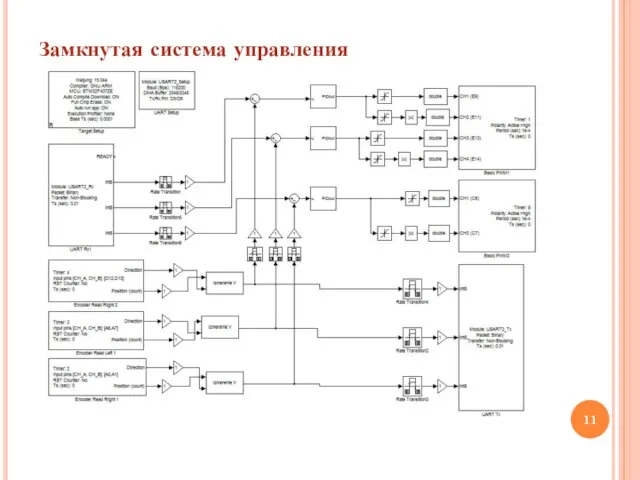
Замкнутая система управления
Замкнутая система управления
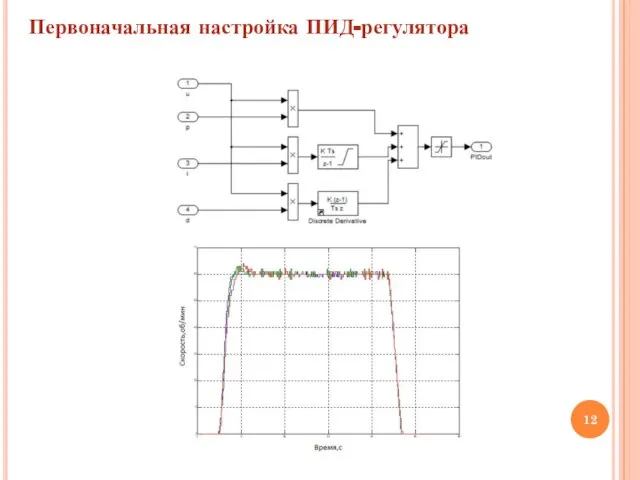
Первоначальная настройка ПИД-регулятора
Первоначальная настройка ПИД-регулятора

Моделирование движения робота
Общий вид модели робота
Моделирование движения робота
Общий вид модели робота
Видео движ
Видео движ
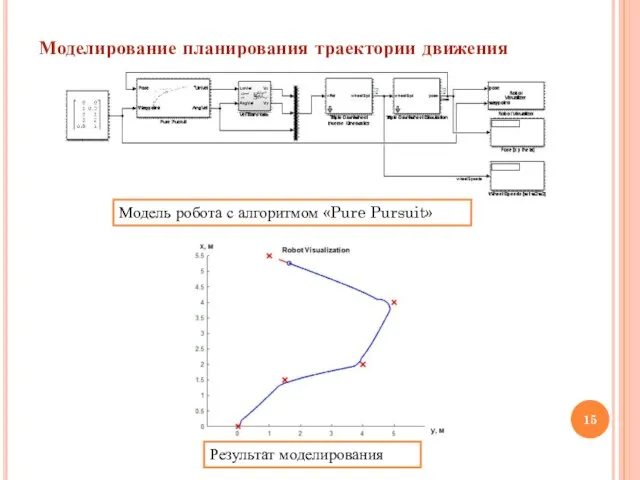
Моделирование планирования траектории движения
Модель робота с алгоритмом «Pure Pursuit»
Результат моделирования
Моделирование планирования траектории движения
Модель робота с алгоритмом «Pure Pursuit»
Результат моделирования
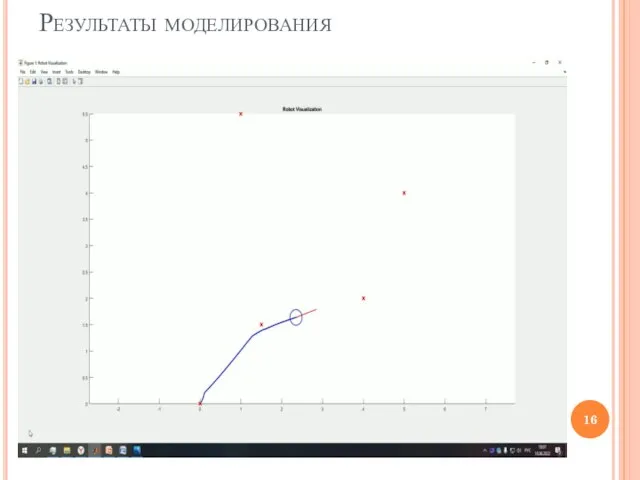
Результаты моделирования
видео
Результаты моделирования
видео
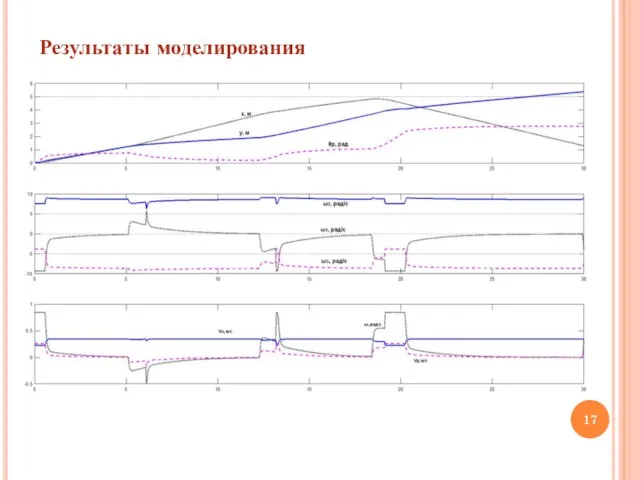
Результаты моделирования
Результаты моделирования
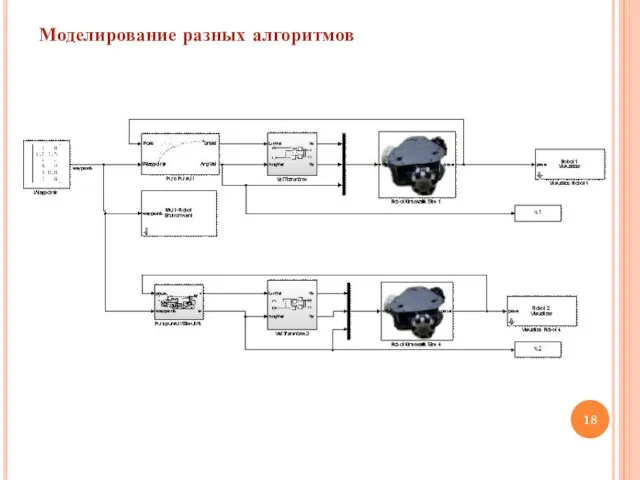
Моделирование разных алгоритмов
Моделирование разных алгоритмов
Результат моделирования
Результат моделирования
Результаты моделирования
Результаты моделирования

Программа для смартфона отладка
Программа для смартфона отладка

Джойстики
Внешний вид программы
Настройка передачи задания
Настройка возврата джойстика
Джойстики
Внешний вид программы
Настройка передачи задания
Настройка возврата джойстика
 Методы защиты энергооборудования от коррозии
Методы защиты энергооборудования от коррозии Что в сердце нашем самое святое
Что в сердце нашем самое святое Информационное моделирование здания детского сада
Информационное моделирование здания детского сада Работа в ZOOM
Работа в ZOOM Цветы из пайеток
Цветы из пайеток Имитационная модель электропривода тележки мостового крана
Имитационная модель электропривода тележки мостового крана Жизнь Будды
Жизнь Будды Оптимизация процесса разработки и утверждения проектов предметов охраны многоквартирных домов
Оптимизация процесса разработки и утверждения проектов предметов охраны многоквартирных домов презентация
презентация Собрание родителей будущих первоклассников. БОУ г. Омска Лицей № 66
Собрание родителей будущих первоклассников. БОУ г. Омска Лицей № 66 proekt_po_tekhnologii Cамочкова
proekt_po_tekhnologii Cамочкова Экспертиза в строительстве и проектировании загородных домов
Экспертиза в строительстве и проектировании загородных домов Виды швов
Виды швов #Правнуки о прадедах
#Правнуки о прадедах Яблоки в корзине
Яблоки в корзине Разработка инновационной одежды на основе системного анализа спиралевидных мышечных комплексов тела человека
Разработка инновационной одежды на основе системного анализа спиралевидных мышечных комплексов тела человека Поздравляем с днём Матери
Поздравляем с днём Матери Bloc Québécois
Bloc Québécois Машины для сверления
Машины для сверления 12
12 Иудейская история в период разделения царств
Иудейская история в период разделения царств Мир глазами историка
Мир глазами историка Первое золото России
Первое золото России Organizatsia_v_trudakh_predstaviteley_shkoly_prinyatia_resheniy
Organizatsia_v_trudakh_predstaviteley_shkoly_prinyatia_resheniy Вспоминаем, повторяем. Узнай фигуру. Расскажи определение
Вспоминаем, повторяем. Узнай фигуру. Расскажи определение Письмо Деду Морозу
Письмо Деду Морозу Сезонность в жизни растений
Сезонность в жизни растений вирт. выст. нагибин
вирт. выст. нагибин