- РНП Часть 4

Содержание
- 2. Назначение САРП САРП предназначен для повышения безопасности плавания судов в районах интенсивного судоходства, вблизи берегов, в
- 3. Последовательность действий при использовании информации РЛС получение информации; обнаружение объектов; измерение координат; определение параметров движения объектов;
- 4. Первичная обработка радиолокационных сигналов внутриимпульсная фильтрация сигналов в приемном устройстве; преобразование аналоговых сигналов в цифровую форму;
- 5. Квантование сигнала Частота квантования должна в два-три раза превышать длительность зондирующего импульса (по теореме Котельникова)
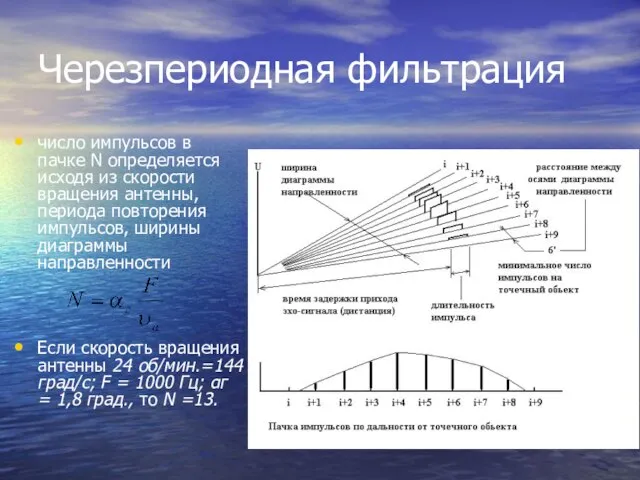
- 6. Черезпериодная фильтрация число импульсов в пачке N определяется исходя из скорости вращения антенны, периода повторения импульсов,
- 7. Сопровождение целей Межобзорное смещение должно учитывать скорость смещения собственного судна и возможную скорость движения в масштабе
- 8. Захват целей на автосопровождение Варианты захвата ручной и автоматический, При автоматическом захвате - зона поиска (захвата)
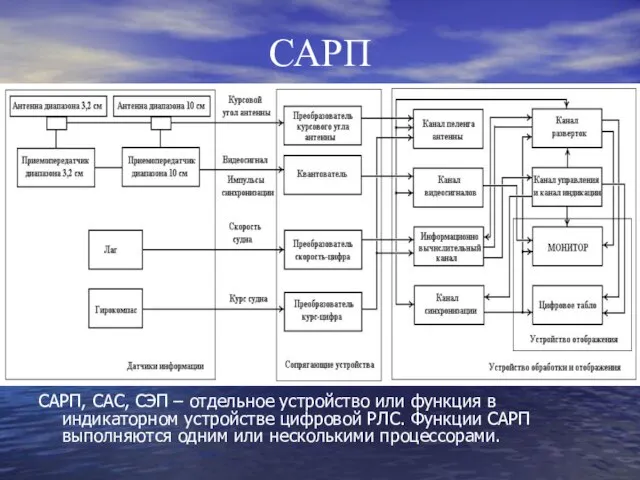
- 9. САРП САРП, САС, СЭП – отдельное устройство или функция в индикаторном устройстве цифровой РЛС. Функции САРП
- 10. Радар-процессор Радар - процессор позволяет: - производить дополнительную аналоговую регулировку видеосигнала для уменьшения помех; - переводить
- 11. Вторичная обработка информации сглаживание координат, выработка параметров движения и кратчайшего сближения, оценка ситуации встречи, планирование и
- 12. Формуляр цели (радиолокационной) Формуляр - перечень навигационных параметров целей: Дистанция; Пеленг или КУ; Курс цели; Скорость
- 13. Сигнализация САРП (световая и звуковая) об опасно сближающихся целях в случае, когда значения Dкр, и tкр
- 14. Планирование и проигрывание маневра Планирование маневра – использование векторов и траекторий прошлого движения (сравнение длины и
- 15. Ограничения САРП «Переброс» сопровождаемой цели на другую цель, а также случай потери сопровождения цели; Задержки при
- 16. Дополнительные задачи САРП отображение элементов содержания навигационных карт; отображение АИС символов; определение обсервованных координат местоположения судна
- 17. Отображение целей АИС Формуляр на каждую цель АИС - источник данных, - идентификатор, - навигационный статус,
- 18. Сигнализация АИС Кол-во АИС целей больше 20, 30, 40; Кол-во обрабатываемых АИС целей приближается к максимуму
- 19. Символика АИС
- 21. Скачать презентацию
Назначение САРП
САРП предназначен для повышения безопасности плавания судов в районах
Назначение САРП
САРП предназначен для повышения безопасности плавания судов в районах
Последовательность действий при использовании информации РЛС
получение информации;
обнаружение объектов;
измерение координат;
определение параметров
Последовательность действий при использовании информации РЛС
получение информации;
обнаружение объектов;
измерение координат;
определение параметров
Первичная обработка радиолокационных сигналов
внутриимпульсная фильтрация сигналов в приемном устройстве;
преобразование аналоговых
Первичная обработка радиолокационных сигналов
внутриимпульсная фильтрация сигналов в приемном устройстве;
преобразование аналоговых
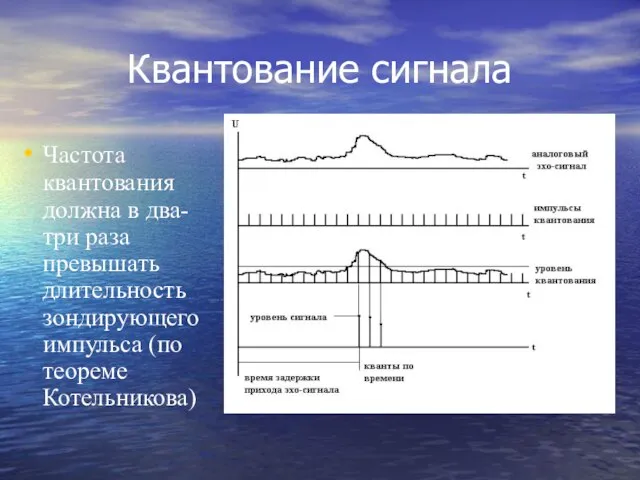
Квантование сигнала
Частота квантования должна в два-три раза превышать длительность зондирующего импульса
Квантование сигнала
Частота квантования должна в два-три раза превышать длительность зондирующего импульса
Черезпериодная фильтрация
число импульсов в пачке N определяется исходя из скорости вращения
Черезпериодная фильтрация
число импульсов в пачке N определяется исходя из скорости вращения

Сопровождение целей
Межобзорное смещение должно учитывать скорость смещения собственного судна и возможную
Сопровождение целей
Межобзорное смещение должно учитывать скорость смещения собственного судна и возможную
Захват целей на автосопровождение
Варианты захвата ручной и автоматический,
При автоматическом захвате
Захват целей на автосопровождение
Варианты захвата ручной и автоматический,
При автоматическом захвате
САРП
САРП, САС, СЭП – отдельное устройство или функция в индикаторном устройстве
САРП
САРП, САС, СЭП – отдельное устройство или функция в индикаторном устройстве

Радар-процессор
Радар - процессор позволяет:
- производить дополнительную аналоговую регулировку видеосигнала для уменьшения
Радар-процессор
Радар - процессор позволяет:
- производить дополнительную аналоговую регулировку видеосигнала для уменьшения
Вторичная обработка информации
сглаживание координат,
выработка параметров движения и кратчайшего сближения,
Вторичная обработка информации
сглаживание координат,
выработка параметров движения и кратчайшего сближения,
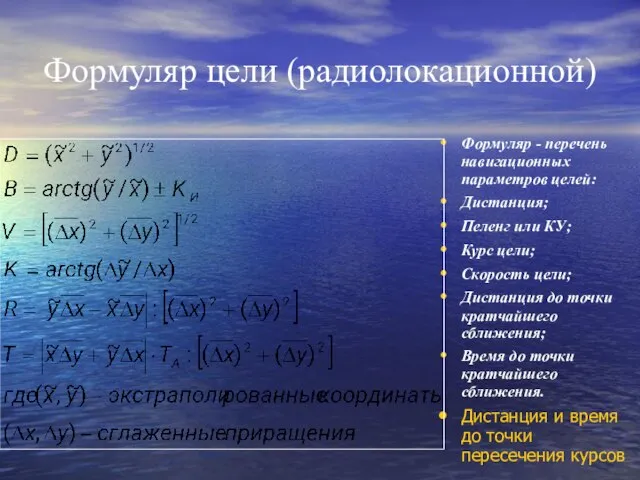
Формуляр цели (радиолокационной)
Формуляр - перечень навигационных параметров целей:
Дистанция;
Пеленг или КУ;
Курс цели;
Скорость
Формуляр цели (радиолокационной)
Формуляр - перечень навигационных параметров целей:
Дистанция;
Пеленг или КУ;
Курс цели;
Скорость
Сигнализация САРП
(световая и звуковая)
об опасно сближающихся целях в случае, когда
Сигнализация САРП
(световая и звуковая)
об опасно сближающихся целях в случае, когда
Планирование и проигрывание маневра
Планирование маневра – использование векторов и траекторий прошлого
Планирование и проигрывание маневра
Планирование маневра – использование векторов и траекторий прошлого
Ограничения САРП
«Переброс» сопровождаемой цели на другую цель, а также случай потери
Ограничения САРП
«Переброс» сопровождаемой цели на другую цель, а также случай потери
Дополнительные задачи САРП
отображение элементов содержания навигационных карт;
отображение АИС символов;
определение обсервованных координат
Дополнительные задачи САРП
отображение элементов содержания навигационных карт;
отображение АИС символов;
определение обсервованных координат
Отображение целей АИС
Формуляр на каждую цель АИС
- источник данных,
- идентификатор,
- навигационный
Отображение целей АИС
Формуляр на каждую цель АИС
- источник данных,
- идентификатор,
- навигационный
Сигнализация АИС
Кол-во АИС целей больше 20, 30, 40;
Кол-во обрабатываемых АИС целей
Сигнализация АИС
Кол-во АИС целей больше 20, 30, 40;
Кол-во обрабатываемых АИС целей
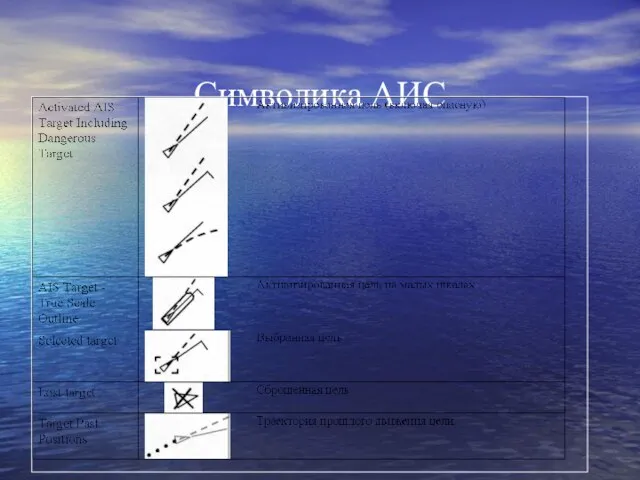
Символика АИС
Символика АИС
 Кучеренко Презентація 3 для експертів U-lead 28.08.2017
Кучеренко Презентація 3 для експертів U-lead 28.08.2017 Электроснабжение. Технология
Электроснабжение. Технология Основы организации производственного процесса в разработке нефтяных месторождений
Основы организации производственного процесса в разработке нефтяных месторождений Обязанности машиниста при нахождении состава в ТО-1 на станционных путях
Обязанности машиниста при нахождении состава в ТО-1 на станционных путях Двигатель. Выбор и применение двигателя
Двигатель. Выбор и применение двигателя Лесные-звери-1
Лесные-звери-1 Look Back
Look Back Материаловедение
Материаловедение СРАВНИ 1
СРАВНИ 1 Портфолио Егора с анимацией
Портфолио Егора с анимацией Правила эксплуатации и обслуживания радиотехнических установок, измерительных приборов и другого оборудования
Правила эксплуатации и обслуживания радиотехнических установок, измерительных приборов и другого оборудования С тобою нас любовь связала
С тобою нас любовь связала С ДНЕМ РОЖДЕНИЯ^J ЛЕРУНЧИК!!!.pptm222
С ДНЕМ РОЖДЕНИЯ^J ЛЕРУНЧИК!!!.pptm222 родословная Кунцевич Галина
родословная Кунцевич Галина введение
введение Интерактивные дидактические игры по теме транспорт
Интерактивные дидактические игры по теме транспорт Основные положения проектирования железобетона
Основные положения проектирования железобетона Управляющая компания Cosmoservice
Управляющая компания Cosmoservice Компьютерная графика
Компьютерная графика Деятельность как способ существования людей
Деятельность как способ существования людей Сальмонеллез
Сальмонеллез Обучение по охране труда для рабочих 1111
Обучение по охране труда для рабочих 1111 Базовые определения схемотехнического проектирования
Базовые определения схемотехнического проектирования Основы ТО и ремонта подвижного состава АТ
Основы ТО и ремонта подвижного состава АТ Транспортный комплекс
Транспортный комплекс Республика в которой мы живем
Республика в которой мы живем Фразеология
Фразеология Цитология мокроты
Цитология мокроты