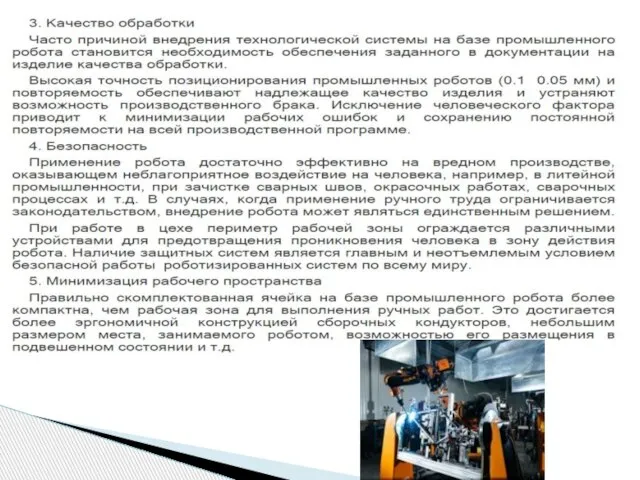
- Робототехнические комплексы

Содержание
- 2. Промышленный робот — автономное устройство, состоящее из механического манипулятора и перепрограммируемой системы управления, которое применяется для
- 3. Первые промышленные роботы начали создавать в середине 50-х годов 20 века в США. В 1954 году
- 4. В 1959 году фирма "Консолидейтед Корпорейшн" (США) опубликовала описание манипулятора с числовым программным управлением (ЧПУ), а
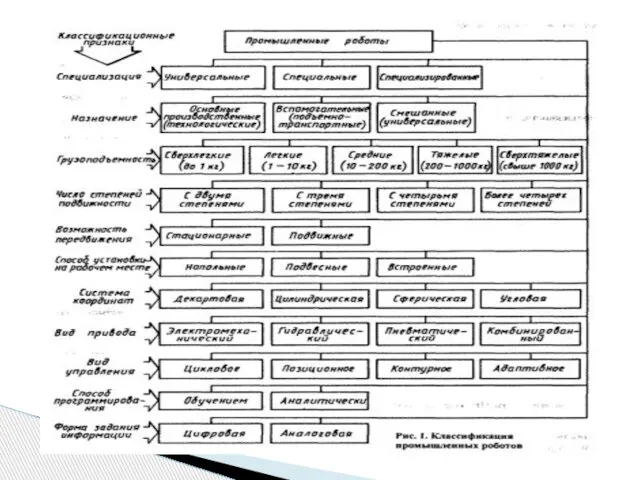
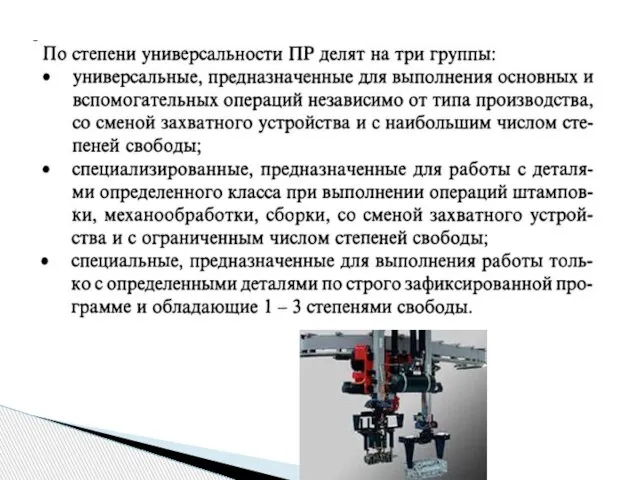
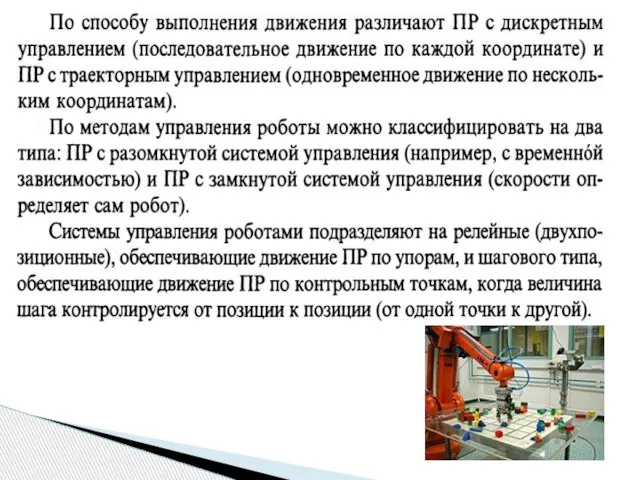
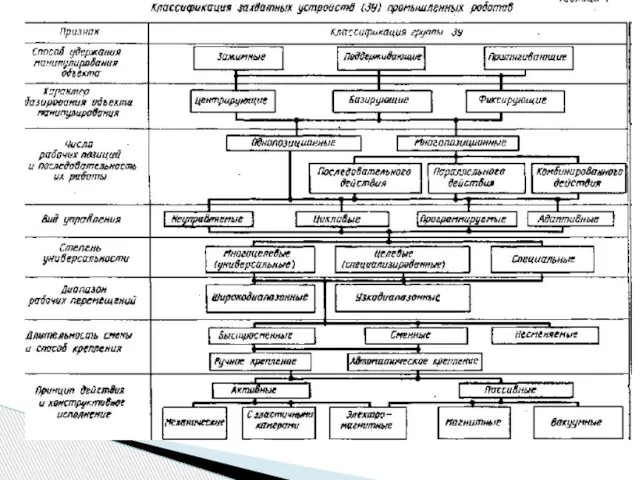
- 5. Классификация ПР
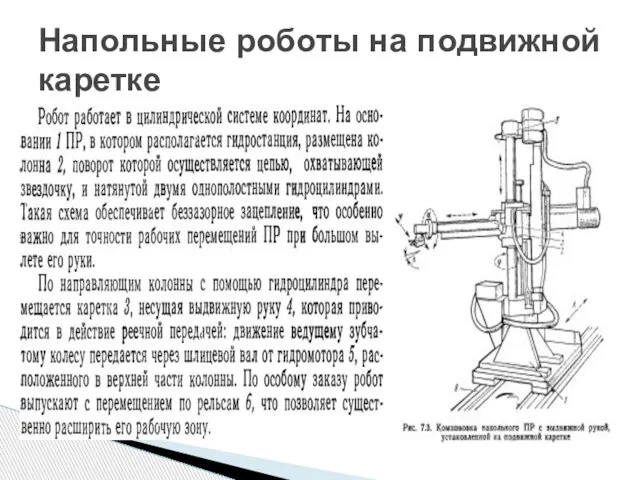
- 7. данной точке при повороте гидродемпферами 6. Механизм подъёма состоит из колонны 8. Рука 1 монтируется на
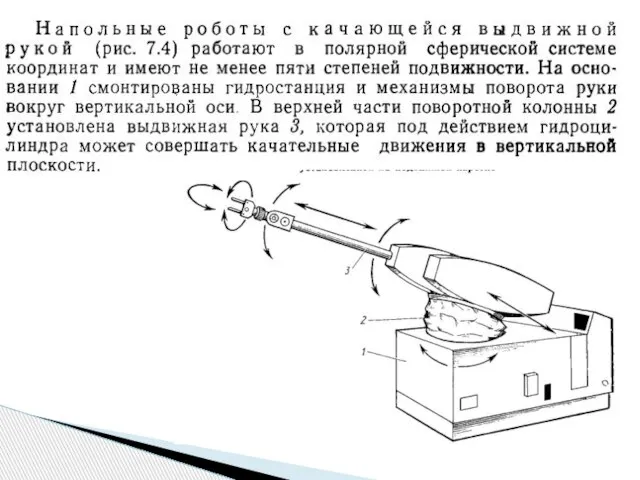
- 8. Напольные роботы на подвижной каретке
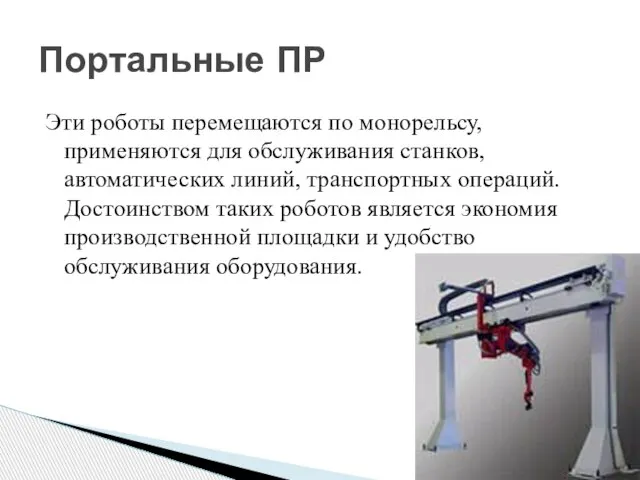
- 10. Портальные ПР Эти роботы перемещаются по монорельсу, применяются для обслуживания станков, автоматических линий, транспортных операций. Достоинством
- 15. Основные технические показатели ПР Номинальная грузоподъемность (кг) Размеры и форма рабочей зоны Показатели степени подвижности: -
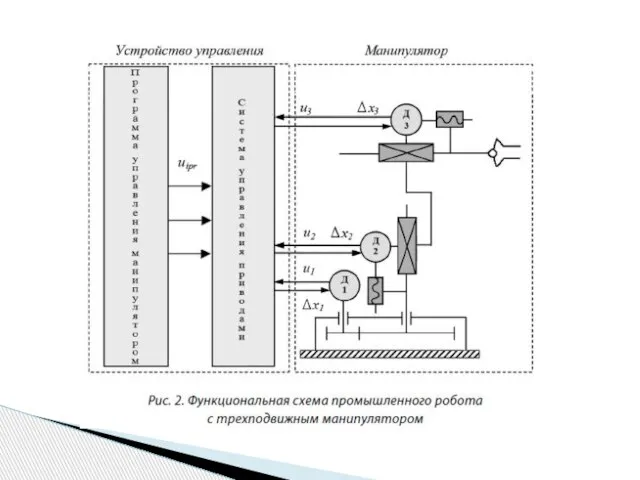
- 16. Простейшая структурная схема ПР Система управления ПР Ввод программ Оператор Информационная система Исполнительное Устройство ПР Внешняя
- 17. Прямоугольная система координат (плоская и пространственная)
- 18. Полярная система координат Плоская Цилиндрическая Сферическая
- 19. Ангулярная система координат
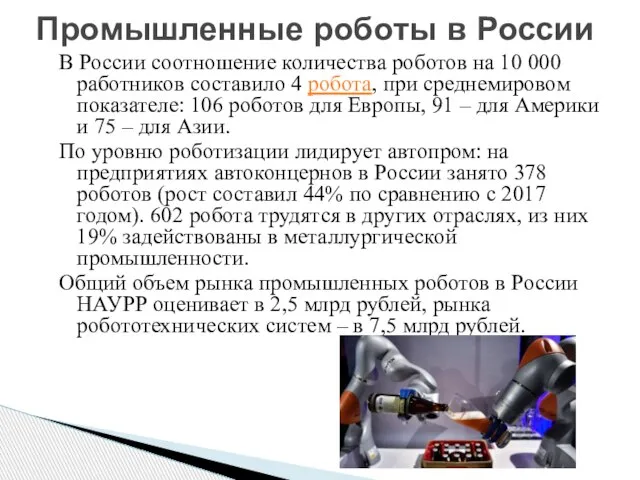
- 28. Промышленные роботы в России В России соотношение количества роботов на 10 000 работников составило 4 робота,
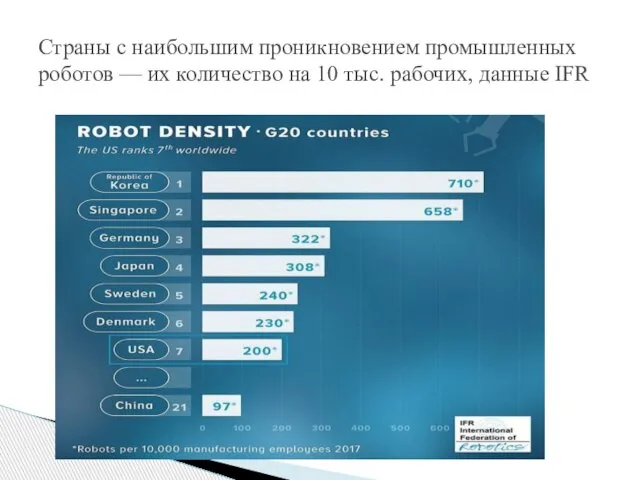
- 29. Страны с наибольшим проникновением промышленных роботов — их количество на 10 тыс. рабочих, данные IFR
- 30. Согласно отчету Национальной Ассоциации участников рынка робототехники (НАУРР), представленном 24 апреля 2019 года, в 2018 году
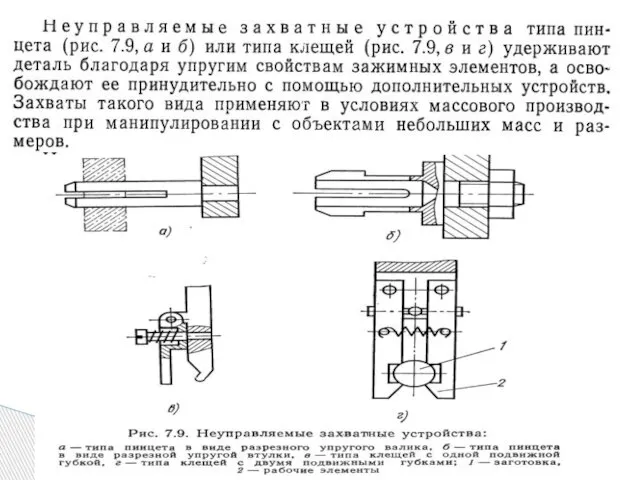
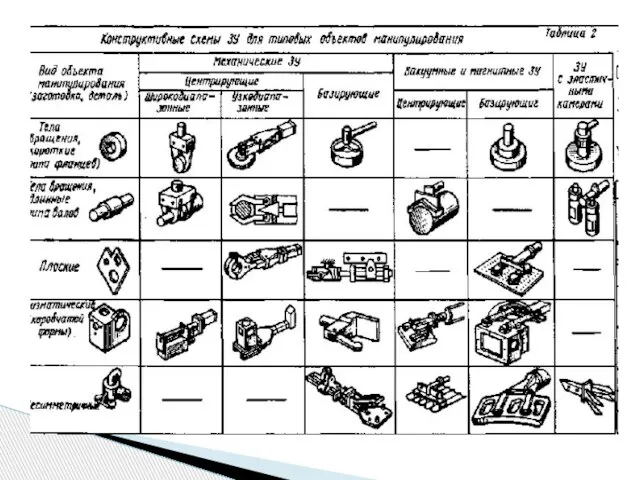
- 31. Захватные устройства промышленных роботов
- 39. Направления развития РТК
- 40. Промышленные роботы часто используют для: Контактной сварки. Плазменной резки. Покраски. Литья металлов. Нанесения лака. Дуговой сварки.
- 46. Появление и развитие промышленных роботов, безусловно, явились одним из крупнейших достижений науки и техники последних лет.
- 47. Роботизация производства переживает сейчас серьезный кризис, который выражается в явном несоответствии между затратами сил и средств,
- 48. Идет становление принципиально нового научно-технического направления, и трудности и неудачи здесь неизбежны. Промышленные роботы имеют слишком
- 49. Сложившееся у широких слоев населения под влиянием средств массовой информации идеализированное представление о роботах, которые якобы
- 50. Превратное понимание роботизации, нацеливание ее не на решение коренных проблем повышения эффективности производства (качество, производительность, себестоимость),
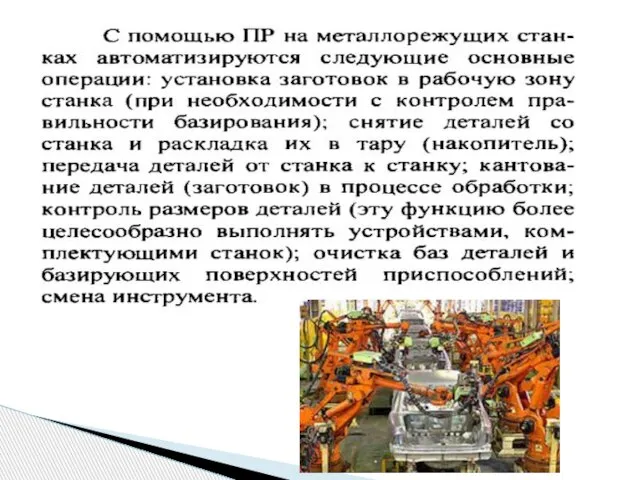
- 51. Так при загрузке металлорежущих станков промышленные роботы на качество изделий не влияют. По производительности оборудования, как
- 53. Скачать презентацию
Промышленный робот — автономное устройство, состоящее из механического манипулятора и перепрограммируемой
Промышленный робот — автономное устройство, состоящее из механического манипулятора и перепрограммируемой
Первые промышленные роботы начали создавать в середине 50-х годов 20 века
Первые промышленные роботы начали создавать в середине 50-х годов 20 века
В 1959 году фирма "Консолидейтед Корпорейшн" (США) опубликовала описание манипулятора с
В 1959 году фирма "Консолидейтед Корпорейшн" (США) опубликовала описание манипулятора с

Классификация ПР
Классификация ПР

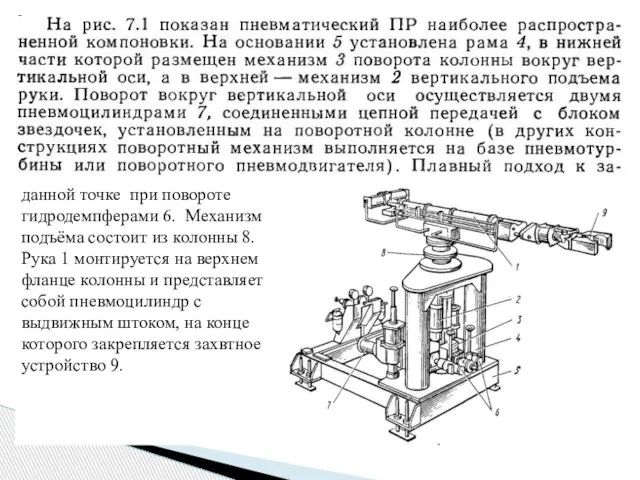
данной точке при повороте гидродемпферами 6. Механизм подъёма состоит из колонны
данной точке при повороте гидродемпферами 6. Механизм подъёма состоит из колонны
Напольные роботы на подвижной каретке
Напольные роботы на подвижной каретке
Портальные ПР
Эти роботы перемещаются по монорельсу, применяются для обслуживания станков, автоматических
Портальные ПР
Эти роботы перемещаются по монорельсу, применяются для обслуживания станков, автоматических
Основные технические показатели ПР
Номинальная грузоподъемность (кг)
Размеры и форма рабочей зоны
Показатели степени
Основные технические показатели ПР
Номинальная грузоподъемность (кг) Размеры и форма рабочей зоны Показатели степени
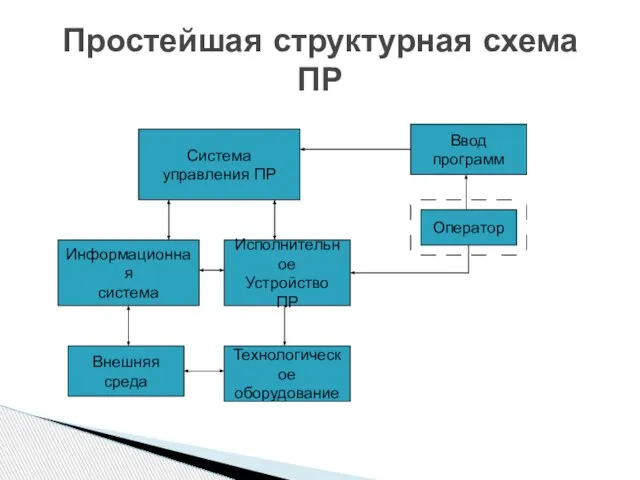
Простейшая структурная схема ПР
Система
управления ПР
Ввод программ
Оператор
Информационная
система
Исполнительное
Устройство
ПР
Внешняя
среда
Технологическое
оборудование
Простейшая структурная схема ПР
Система
управления ПР
Ввод программ
Оператор
Информационная
система
Исполнительное
Устройство
ПР
Внешняя
среда
Технологическое
оборудование
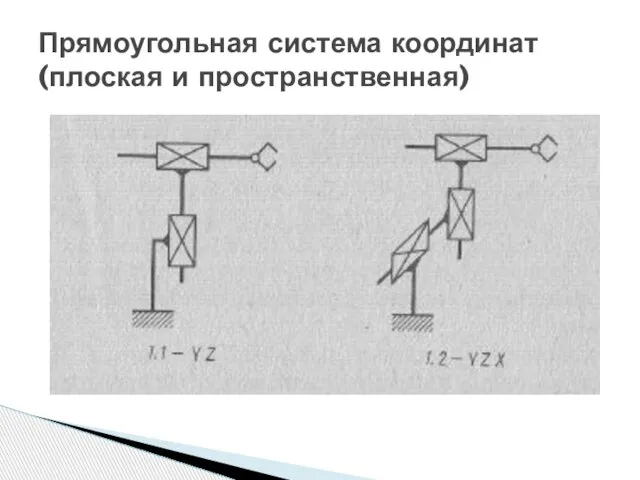
Прямоугольная система координат (плоская и пространственная)
Прямоугольная система координат (плоская и пространственная)

Полярная система координат
Плоская
Цилиндрическая
Сферическая
Полярная система координат
Плоская
Цилиндрическая
Сферическая
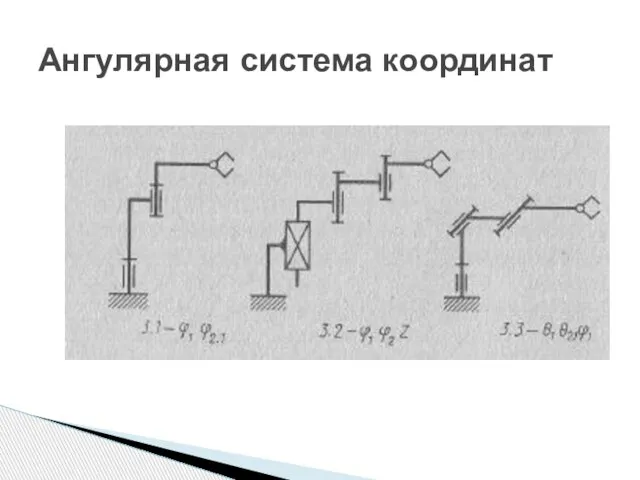
Ангулярная система координат
Ангулярная система координат


Промышленные роботы в России
В России соотношение количества роботов на 10 000
Промышленные роботы в России
В России соотношение количества роботов на 10 000
Страны с наибольшим проникновением промышленных роботов — их количество на 10
Страны с наибольшим проникновением промышленных роботов — их количество на 10

Согласно отчету Национальной Ассоциации участников рынка робототехники (НАУРР), представленном 24 апреля 2019
Согласно отчету Национальной Ассоциации участников рынка робототехники (НАУРР), представленном 24 апреля 2019

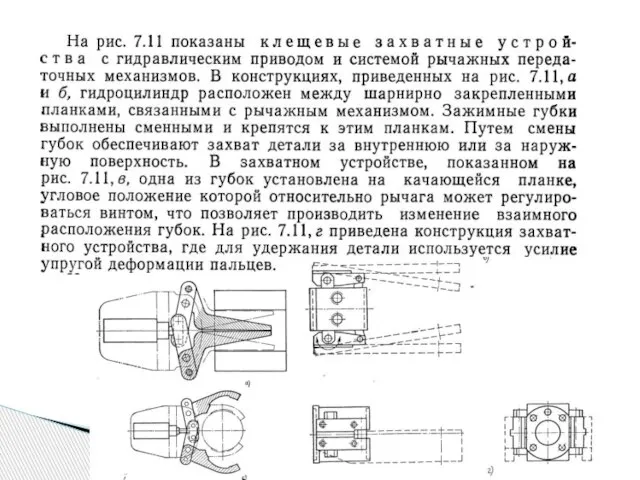
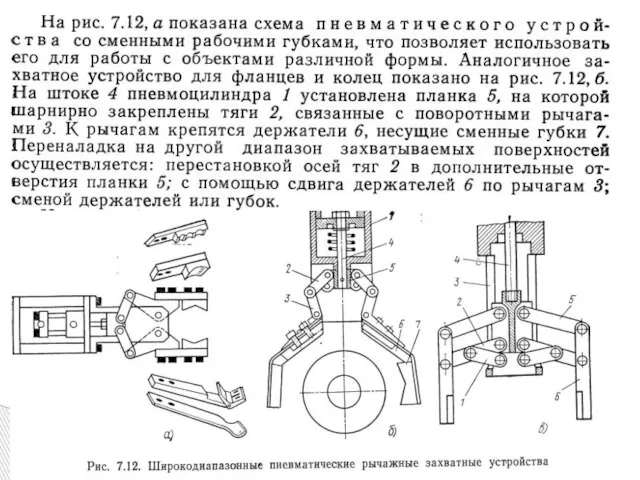
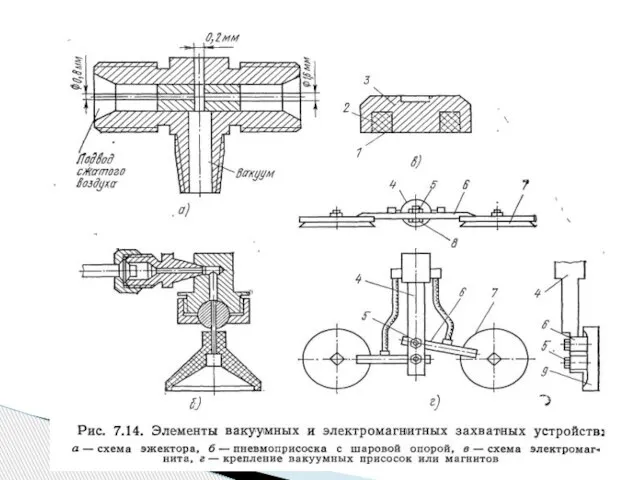
Захватные устройства промышленных роботов
Захватные устройства промышленных роботов

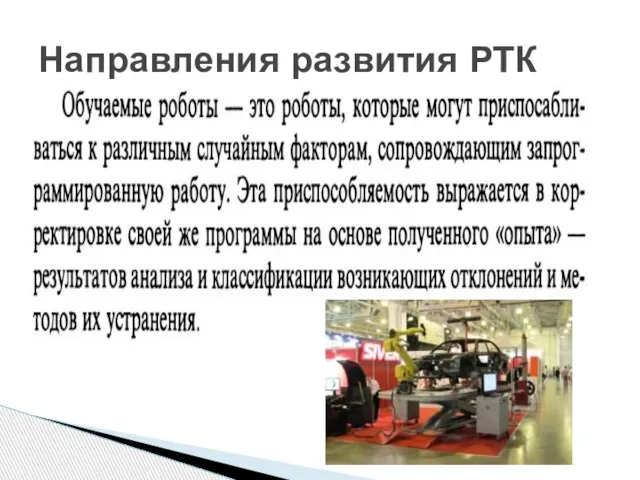
Направления развития РТК
Направления развития РТК

Промышленные роботы часто используют для:
Контактной сварки. Плазменной резки. Покраски.
Литья металлов. Нанесения
Промышленные роботы часто используют для:
Контактной сварки. Плазменной резки. Покраски.
Литья металлов. Нанесения

Появление и развитие промышленных роботов, безусловно, явились одним из крупнейших достижений
Появление и развитие промышленных роботов, безусловно, явились одним из крупнейших достижений
Роботизация производства переживает сейчас серьезный кризис, который выражается в явном несоответствии
Роботизация производства переживает сейчас серьезный кризис, который выражается в явном несоответствии
Идет становление принципиально нового научно-технического направления, и трудности и неудачи здесь
Идет становление принципиально нового научно-технического направления, и трудности и неудачи здесь
Сложившееся у широких слоев населения под влиянием средств массовой информации идеализированное
Сложившееся у широких слоев населения под влиянием средств массовой информации идеализированное
Превратное понимание роботизации, нацеливание ее не на решение коренных проблем повышения
Превратное понимание роботизации, нацеливание ее не на решение коренных проблем повышения
Так при загрузке металлорежущих станков промышленные роботы на качество изделий не
Так при загрузке металлорежущих станков промышленные роботы на качество изделий не
 Основы резки на металлорежующих станках фрезерование
Основы резки на металлорежующих станках фрезерование Социальный школьный проект Правильное питание – залог здоровья
Социальный школьный проект Правильное питание – залог здоровья Обработка воротников различных типов
Обработка воротников различных типов Русский авангард
Русский авангард Дружная семейка Эдуарда Успенского
Дружная семейка Эдуарда Успенского Новый год
Новый год Documentation numerique Сablage Х76 electrique Рh2
Documentation numerique Сablage Х76 electrique Рh2 Кейем-һалым
Кейем-һалым Нобелевские лауреаты 2011 года
Нобелевские лауреаты 2011 года 20170428_viktorina_po_istorii_moskvy_0
20170428_viktorina_po_istorii_moskvy_0 Ресурсосберегающие технологии в строительстве
Ресурсосберегающие технологии в строительстве Строительство транспортных тоннелей
Строительство транспортных тоннелей Тема 2
Тема 2 Малышам о космосе
Малышам о космосе Обобщение знаний о написании слов с орфограммами
Обобщение знаний о написании слов с орфограммами Мұнайға ілеспе газдарды утилизациялау қондырғысын жобалау
Мұнайға ілеспе газдарды утилизациялау қондырғысын жобалау Игры и упражнения для речевого развития (1)
Игры и упражнения для речевого развития (1) Резисторный усилитель напряжения
Резисторный усилитель напряжения Покров Пресвятой Богородицы. Викторина
Покров Пресвятой Богородицы. Викторина התנדבות תשעו היכן להתנדב-WFM
התנדבות תשעו היכן להתנדב-WFM репертуар 1 курс лекция 12 Любек
репертуар 1 курс лекция 12 Любек Новый подход к эксплуатации общественных зданий
Новый подход к эксплуатации общественных зданий Современный урок технологии
Современный урок технологии Дизайны наборы НГ Подарки
Дизайны наборы НГ Подарки Освобождение Воронежа
Освобождение Воронежа Служебное слово “过”
Служебное слово “过” Быть фотографом здорово!
Быть фотографом здорово! Голос ОК
Голос ОК