- Динамическая устойчивость нагрузки

Содержание
- 2. Электрические двигатели составляют основную часть нагрузки энергосистем. При больших возмущениях двигатели оказывают влияние не только на
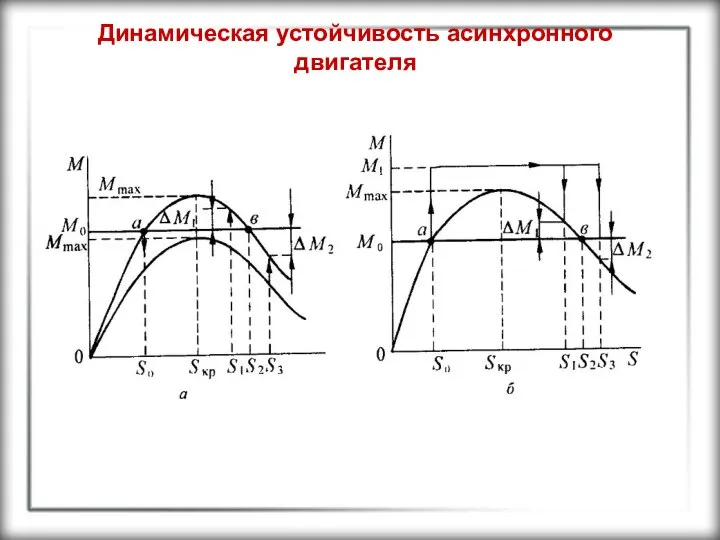
- 3. Динамическая устойчивость асинхронного двигателя Снижение напряжения на зажимах двигателя или рост механического момента на его валу
- 4. Динамическая устойчивость асинхронного двигателя Чтобы этого не произошло, надо своевременно восстановить напряжение или уменьшить механический момент.
- 5. Динамическая устойчивость асинхронного двигателя
- 6. Динамическая устойчивость асинхронного двигателя Если восстановление напряжения или момента произойдёт при скольжении , то избыточный момент
- 7. Динамическая устойчивость асинхронного двигателя При изменении момента на валу двигателя ускорение ротора может найдено путём решения
- 8. Динамическая устойчивость асинхронного двигателя Здесь , – момент инерции двигателя, – приведенный момент механизма с учётом
- 9. Динамическая устойчивость асинхронного двигателя Подставив выражение (15.2) в (15.1) и выразив в относительных единицах двигателя, получим
- 10. Динамическая устойчивость асинхронного двигателя Уравнение (15.3) описывает движение ротора двигателя при больших возмущениях и называется уравнением
- 11. Динамическая устойчивость синхронного двигателя Предположим, что двигатель снабжён АРВ пропорционального типа; при этом он может быть
- 12. Динамическая устойчивость синхронного двигателя
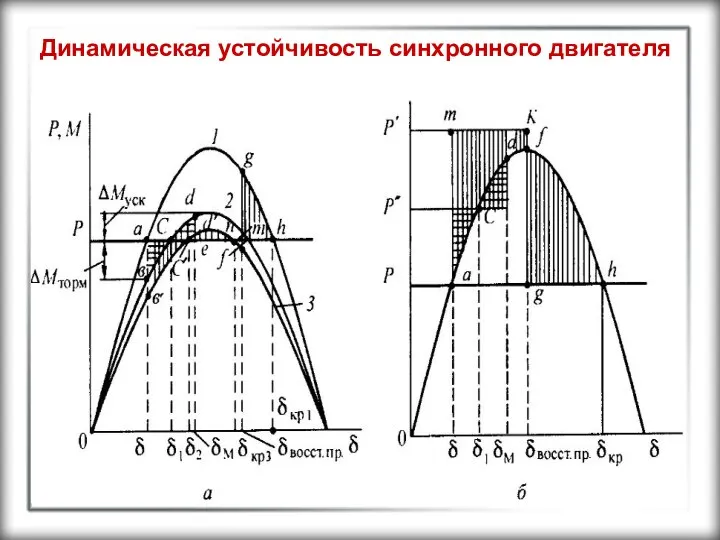
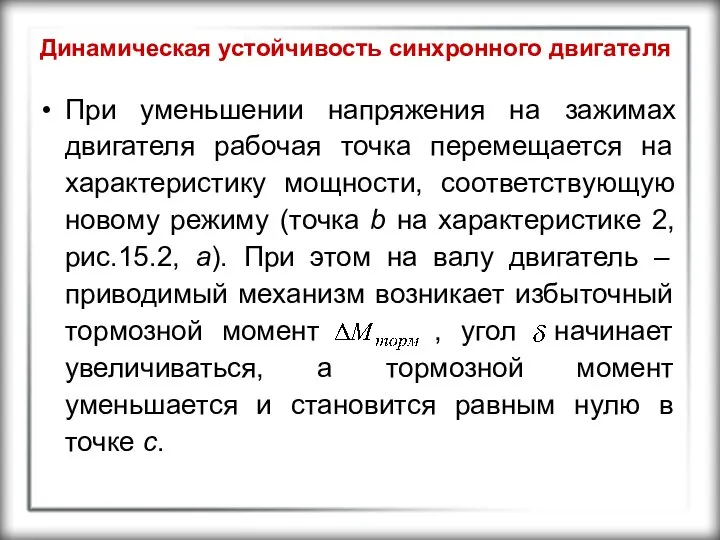
- 13. Динамическая устойчивость синхронного двигателя При уменьшении напряжения на зажимах двигателя рабочая точка перемещается на характеристику мощности,
- 14. Динамическая устойчивость синхронного двигателя Кинетическая энергия, запасённая ротором двигателя при его движении от точки b к
- 15. Динамическая устойчивость синхронного двигателя В точке d скорость вращения ротора становится равной синхронной, но, поскольку на
- 16. Динамическая устойчивость синхронного двигателя Рассмотренное снижение напряжения (характеристика 2) не нарушает устойчивости двигателя, и он может
- 17. Динамическая устойчивость синхронного двигателя При этом происходит переход рабочей точки на характеристику 1, новая площадь ускорения
- 18. Динамическая устойчивость синхронного двигателя или
- 19. Динамическая устойчивость синхронного двигателя откуда после преобразований получаем .
- 20. Динамическая устойчивость синхронного двигателя При увеличении механического момента двигателя до значения (рис.15.2, б) на валу возникает
- 21. Динамическая устойчивость синхронного двигателя При значительном увеличении механического момента до величины , динамическая устойчивость в отличие
- 22. Динамическая устойчивость синхронного двигателя На валу двигателя возникает избыточный ускоряющий момент, пропорциональный отрезку fg. Устойчивость двигателя
- 23. Динамическая устойчивость синхронного двигателя Раскрыв интегралы и преобразовав последнее выражение, получим . Время, в течение которого
- 24. Динамическая устойчивость синхронного двигателя При возникновении на валу двигателя избыточного момента его относительная скорость будет определяться
- 25. Динамическая устойчивость синхронного двигателя Скольжение двигателя представим в виде . При появлении избыточного момента ротор получает
- 26. Динамическая устойчивость синхронного двигателя Это уравнение называется уравнением движения ротора синхронного двигателя. Правая часть этого уравнения
- 27. Динамическая устойчивость синхронного двигателя Решение уравнения движения ротора двигателя (15.4) позволяет сделать вывод об устойчивости двигателя.
- 28. Пуск двигателей Пуск двигателя – это процесс перехода двигателя и приводного механизма ( ) в состояние
- 29. Пуск двигателей Во время пуска двигатель потребляет значительно большее количество энергии, чем в нормальном режиме, что
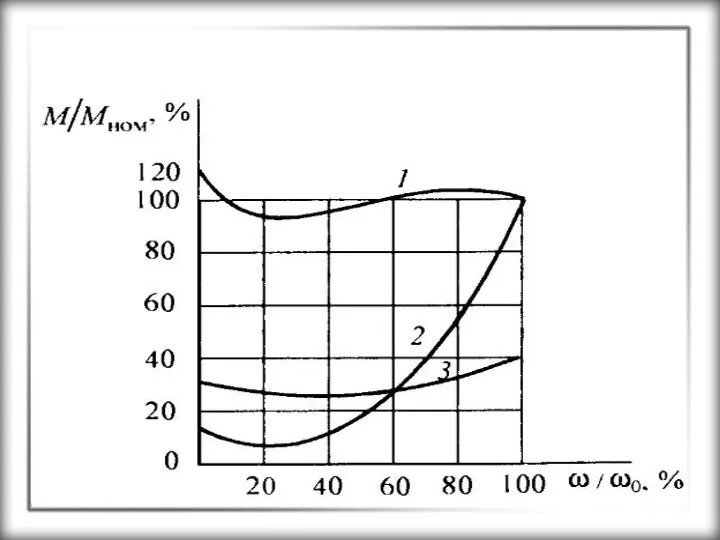
- 30. Механические характеристики некоторых типов приводимых во вращение механизмов представлены на рис.15.3. Выделяют лёгкие, нормальные и тяжёлые
- 32. Тяжёлые условия пуска – это такие условия, при которых начальный момент вращения двигателя составляет 100% и
- 33. Схемы пуска определяются жёсткостью питающей сети. Ниже приведены схемы прямого и реакторного пусков как наиболее распространённые
- 34. При реакторном пуске двигатель подключается к сети через реактор, который ограничивает пусковой ток двигателя, снижая напряжение
- 35. Напряжение на зажимах двигателя при реакторном пуске , (12.6) где – напряжение сети, – сопротивление двигателя
- 36. Пусковой ток при этом .(15.7) Пусковой момент при реакторном пуске определится из выражения: .(15.8)
- 37. В выражениях (15.5) – (15.8) предполагается, что двигатель в режиме пуска может быть представлен только реактивным
- 38. Недостатком реакторного пуска является необходимость в дополнительном оборудовании (реакторе и выключателе). Кроме того, увеличивается время пуска
- 39. Пуск синхронных двигателей Синхронный двигатель подключается к сети недовозбуждённым. Его обмотка возбуждения закорачивается или подключается к
- 40. Расчёт режима пуска производится с целью определения времени пуска, допустимости нагрева обмоток, характера изменения напряжения питающей
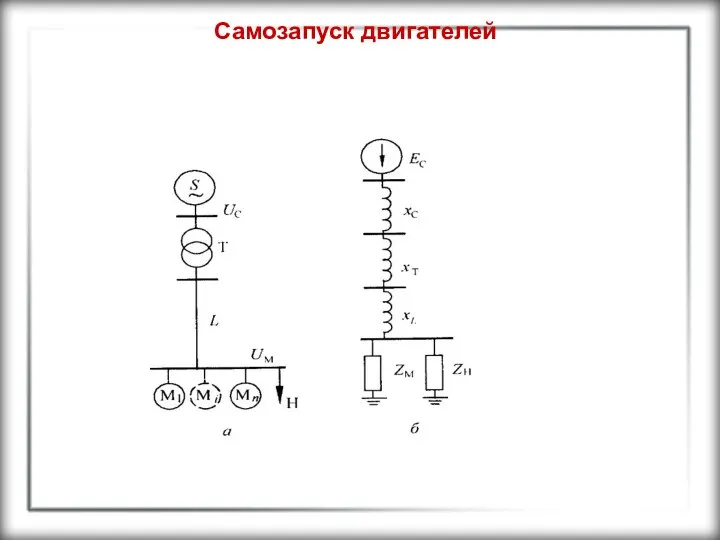
- 41. Самозапуск двигателей Самозапуск двигателей – это процесс восстановления нормального режима работы двигателя после кратковременного отключения источника
- 42. Самозапуск двигателей По условиям самозапуска приводные механизмы делятся на две группы: механизмы, имеющие постоянный момент сопротивления
- 43. Самозапуск двигателей Для обеспечения успешного самозапуска определяют суммарную мощность электродвигателей, которые могут быть запущены после перерыва
- 44. Самозапуск двигателей Расчёт самозапуска предполагает решение нескольких задач. 1. Рассчитывается момент вращения двигателей при пониженном напряжении
- 45. Самозапуск двигателей Напряжение на зажимах двигателей при самозапуске , (15.9) где , – внешнее сопротивление. Здесь
- 46. Самозапуск двигателей
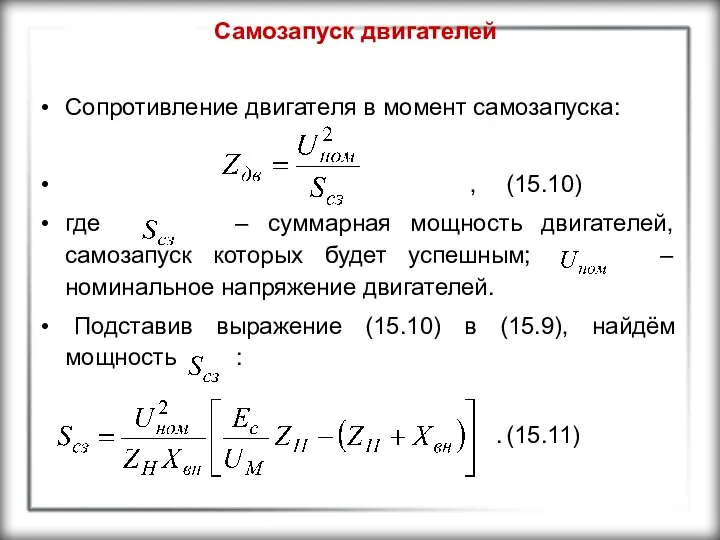
- 47. Самозапуск двигателей Сопротивление двигателя в момент самозапуска: , (15.10) где – суммарная мощность двигателей, самозапуск которых
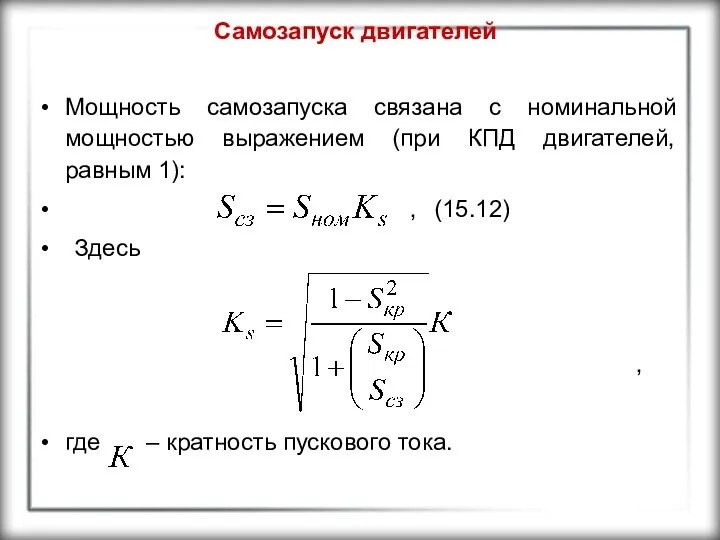
- 48. Самозапуск двигателей Мощность самозапуска связана с номинальной мощностью выражением (при КПД двигателей, равным 1): , (15.12)
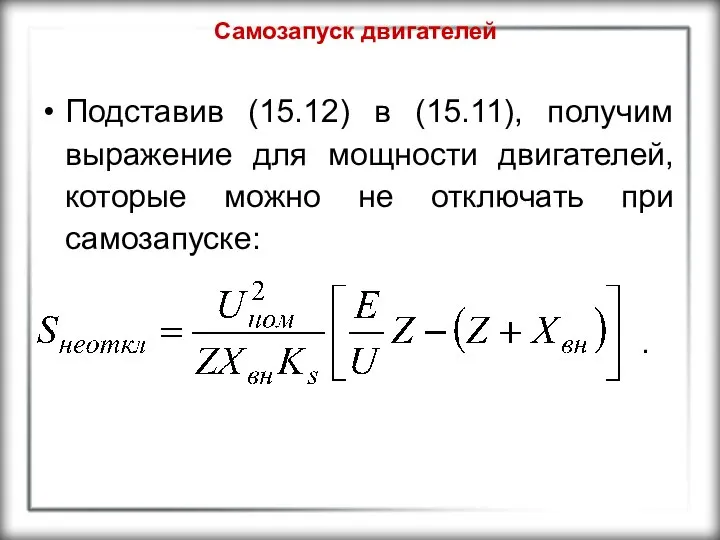
- 49. Самозапуск двигателей Подставив (15.12) в (15.11), получим выражение для мощности двигателей, которые можно не отключать при
- 50. Самозапуск двигателей Минимальное допустимое напряжение на зажимах двигателей по условию возможности осуществления самозапуска для механизмов с
- 51. Самозапуск двигателей Задачи расчёта самозапуска: проверка влияния самозапуска на режим работы потребителей, находящихся в электрической близости;
- 52. Самозапуск двигателей Во время перерыва питания напряжение на зажимах двигателя определяется его ЭДС, которая уменьшается по
- 53. Самозапуск двигателей Допустимое напряжение на шинах нагрузки во время самозапуска определяется следующими требованиями: 1. При совместном
- 54. Автоматическое повторное включение и автоматическое включение резервного питания Короткие замыкания, возникающие в различных точках электрической системы,
- 55. Автоматическое повторное включение и автоматическое включение резервного питания Интервал времени между моментом отключения КЗ и повторным
- 56. Автоматическое повторное включение и автоматическое включение резервного питания АПВ на воздушных линиях позволяет восстановить нормальную работу
- 57. Автоматическое повторное включение и автоматическое включение резервного питания Автоматическое включение резервного питания (АВР) является эффективным способом
- 58. Автоматическое повторное включение и автоматическое включение резервного питания Схема питания с устройством АВР
- 60. Скачать презентацию
Электрические двигатели составляют основную часть нагрузки энергосистем. При больших возмущениях двигатели
Электрические двигатели составляют основную часть нагрузки энергосистем. При больших возмущениях двигатели
Динамическая устойчивость асинхронного двигателя
Снижение напряжения на зажимах двигателя или рост механического
Динамическая устойчивость асинхронного двигателя
Снижение напряжения на зажимах двигателя или рост механического
Динамическая устойчивость асинхронного двигателя
Чтобы этого не произошло, надо своевременно восстановить напряжение
Динамическая устойчивость асинхронного двигателя
Чтобы этого не произошло, надо своевременно восстановить напряжение
Динамическая устойчивость асинхронного двигателя
Динамическая устойчивость асинхронного двигателя
Динамическая устойчивость асинхронного двигателя
Если восстановление напряжения или момента произойдёт при скольжении
Динамическая устойчивость асинхронного двигателя
Если восстановление напряжения или момента произойдёт при скольжении
Динамическая устойчивость асинхронного двигателя
При изменении момента на валу двигателя ускорение ротора
Динамическая устойчивость асинхронного двигателя
При изменении момента на валу двигателя ускорение ротора
Динамическая устойчивость асинхронного двигателя
Здесь , – момент инерции двигателя, – приведенный
Динамическая устойчивость асинхронного двигателя
Здесь , – момент инерции двигателя, – приведенный
Динамическая устойчивость асинхронного двигателя
Подставив выражение (15.2) в (15.1) и выразив в
Динамическая устойчивость асинхронного двигателя
Подставив выражение (15.2) в (15.1) и выразив в
Динамическая устойчивость асинхронного двигателя
Уравнение (15.3) описывает движение ротора двигателя при больших
Динамическая устойчивость асинхронного двигателя
Уравнение (15.3) описывает движение ротора двигателя при больших
Динамическая устойчивость синхронного двигателя
Предположим, что двигатель снабжён АРВ пропорционального типа; при
Динамическая устойчивость синхронного двигателя
Предположим, что двигатель снабжён АРВ пропорционального типа; при
Динамическая устойчивость синхронного двигателя
Динамическая устойчивость синхронного двигателя
Динамическая устойчивость синхронного двигателя
При уменьшении напряжения на зажимах двигателя рабочая точка
Динамическая устойчивость синхронного двигателя
При уменьшении напряжения на зажимах двигателя рабочая точка
Динамическая устойчивость синхронного двигателя
Кинетическая энергия, запасённая ротором двигателя при его движении
Динамическая устойчивость синхронного двигателя
Кинетическая энергия, запасённая ротором двигателя при его движении
Динамическая устойчивость синхронного двигателя
В точке d скорость вращения ротора становится равной
Динамическая устойчивость синхронного двигателя
В точке d скорость вращения ротора становится равной
Динамическая устойчивость синхронного двигателя
Рассмотренное снижение напряжения (характеристика 2) не нарушает устойчивости
Динамическая устойчивость синхронного двигателя
Рассмотренное снижение напряжения (характеристика 2) не нарушает устойчивости
Динамическая устойчивость синхронного двигателя
При этом происходит переход рабочей точки на характеристику
Динамическая устойчивость синхронного двигателя
При этом происходит переход рабочей точки на характеристику
Динамическая устойчивость синхронного двигателя
или
Динамическая устойчивость синхронного двигателя
или
Динамическая устойчивость синхронного двигателя
откуда после преобразований получаем
.
Динамическая устойчивость синхронного двигателя
откуда после преобразований получаем
.
Динамическая устойчивость синхронного двигателя
При увеличении механического момента двигателя до значения (рис.15.2,
Динамическая устойчивость синхронного двигателя
При увеличении механического момента двигателя до значения (рис.15.2,
Динамическая устойчивость синхронного двигателя
При значительном увеличении механического момента до величины ,
Динамическая устойчивость синхронного двигателя
При значительном увеличении механического момента до величины ,
Динамическая устойчивость синхронного двигателя
На валу двигателя возникает избыточный ускоряющий момент, пропорциональный
Динамическая устойчивость синхронного двигателя
На валу двигателя возникает избыточный ускоряющий момент, пропорциональный
Динамическая устойчивость синхронного двигателя
Раскрыв интегралы и преобразовав последнее выражение, получим
.
Время,
Динамическая устойчивость синхронного двигателя
Раскрыв интегралы и преобразовав последнее выражение, получим
.
Время,
Динамическая устойчивость синхронного двигателя
При возникновении на валу двигателя избыточного момента его
Динамическая устойчивость синхронного двигателя
При возникновении на валу двигателя избыточного момента его
Динамическая устойчивость синхронного двигателя
Скольжение двигателя представим в виде
.
При появлении избыточного момента
Динамическая устойчивость синхронного двигателя
Скольжение двигателя представим в виде
.
При появлении избыточного момента
Динамическая устойчивость синхронного двигателя
Это уравнение называется уравнением движения ротора синхронного двигателя.
Динамическая устойчивость синхронного двигателя
Это уравнение называется уравнением движения ротора синхронного двигателя.
Динамическая устойчивость синхронного двигателя
Решение уравнения движения ротора двигателя (15.4) позволяет сделать
Динамическая устойчивость синхронного двигателя
Решение уравнения движения ротора двигателя (15.4) позволяет сделать
Пуск двигателей
Пуск двигателя – это процесс перехода двигателя и приводного механизма
Пуск двигателей
Пуск двигателя – это процесс перехода двигателя и приводного механизма
Пуск двигателей
Во время пуска двигатель потребляет значительно большее количество энергии, чем
Пуск двигателей
Во время пуска двигатель потребляет значительно большее количество энергии, чем
Механические характеристики некоторых типов приводимых во вращение механизмов представлены на рис.15.3.
Механические характеристики некоторых типов приводимых во вращение механизмов представлены на рис.15.3.
Тяжёлые условия пуска – это такие условия, при которых начальный момент
Тяжёлые условия пуска – это такие условия, при которых начальный момент
Схемы пуска определяются жёсткостью питающей сети. Ниже приведены схемы прямого и
Схемы пуска определяются жёсткостью питающей сети. Ниже приведены схемы прямого и
При реакторном пуске двигатель подключается к сети через реактор, который ограничивает
При реакторном пуске двигатель подключается к сети через реактор, который ограничивает
Напряжение на зажимах двигателя при реакторном пуске
, (12.6)
где – напряжение сети, –
Напряжение на зажимах двигателя при реакторном пуске
, (12.6)
где – напряжение сети, –
Пусковой ток при этом
.(15.7)
Пусковой момент при реакторном пуске определится из
Пусковой ток при этом
.(15.7)
Пусковой момент при реакторном пуске определится из
В выражениях (15.5) – (15.8) предполагается, что двигатель в режиме пуска
В выражениях (15.5) – (15.8) предполагается, что двигатель в режиме пуска
Недостатком реакторного пуска является необходимость в дополнительном оборудовании (реакторе и выключателе).
Недостатком реакторного пуска является необходимость в дополнительном оборудовании (реакторе и выключателе).
Пуск синхронных двигателей
Синхронный двигатель подключается к сети недовозбуждённым. Его обмотка возбуждения
Пуск синхронных двигателей
Синхронный двигатель подключается к сети недовозбуждённым. Его обмотка возбуждения
Расчёт режима пуска производится с целью определения времени пуска, допустимости нагрева
Расчёт режима пуска производится с целью определения времени пуска, допустимости нагрева
Самозапуск двигателей
Самозапуск двигателей – это процесс восстановления нормального режима работы двигателя
Самозапуск двигателей
Самозапуск двигателей – это процесс восстановления нормального режима работы двигателя
Самозапуск двигателей
По условиям самозапуска приводные механизмы делятся на две группы:
механизмы, имеющие
Самозапуск двигателей
По условиям самозапуска приводные механизмы делятся на две группы:
механизмы, имеющие
Самозапуск двигателей
Для обеспечения успешного самозапуска определяют суммарную мощность электродвигателей, которые могут
Самозапуск двигателей
Для обеспечения успешного самозапуска определяют суммарную мощность электродвигателей, которые могут
Самозапуск двигателей
Расчёт самозапуска предполагает решение нескольких задач.
1. Рассчитывается момент вращения двигателей
Самозапуск двигателей
Расчёт самозапуска предполагает решение нескольких задач.
1. Рассчитывается момент вращения двигателей
Самозапуск двигателей
Напряжение на зажимах двигателей при самозапуске
, (15.9)
где , – внешнее сопротивление.
Здесь
Самозапуск двигателей
Напряжение на зажимах двигателей при самозапуске
, (15.9)
где , – внешнее сопротивление.
Здесь
Самозапуск двигателей
Самозапуск двигателей
Самозапуск двигателей
Сопротивление двигателя в момент самозапуска:
, (15.10)
где – суммарная мощность двигателей,
Самозапуск двигателей
Сопротивление двигателя в момент самозапуска:
, (15.10)
где – суммарная мощность двигателей,
Самозапуск двигателей
Мощность самозапуска связана с номинальной мощностью выражением (при КПД двигателей,
Самозапуск двигателей
Мощность самозапуска связана с номинальной мощностью выражением (при КПД двигателей,
Самозапуск двигателей
Подставив (15.12) в (15.11), получим выражение для мощности двигателей, которые
Самозапуск двигателей
Подставив (15.12) в (15.11), получим выражение для мощности двигателей, которые
Самозапуск двигателей
Минимальное допустимое напряжение на зажимах двигателей по условию возможности осуществления
Самозапуск двигателей
Минимальное допустимое напряжение на зажимах двигателей по условию возможности осуществления
Самозапуск двигателей
Задачи расчёта самозапуска:
проверка влияния самозапуска на режим работы потребителей, находящихся
Самозапуск двигателей
Задачи расчёта самозапуска:
проверка влияния самозапуска на режим работы потребителей, находящихся
Самозапуск двигателей
Во время перерыва питания напряжение на зажимах двигателя определяется его
Самозапуск двигателей
Во время перерыва питания напряжение на зажимах двигателя определяется его
Самозапуск двигателей
Допустимое напряжение на шинах нагрузки во время самозапуска определяется следующими
Самозапуск двигателей
Допустимое напряжение на шинах нагрузки во время самозапуска определяется следующими
Автоматическое повторное включение и автоматическое включение резервного питания
Короткие замыкания, возникающие в
Автоматическое повторное включение и автоматическое включение резервного питания
Короткие замыкания, возникающие в
Автоматическое повторное включение и автоматическое включение резервного питания
Интервал времени между моментом
Автоматическое повторное включение и автоматическое включение резервного питания
Интервал времени между моментом
Автоматическое повторное включение и автоматическое включение резервного питания
АПВ на воздушных линиях
Автоматическое повторное включение и автоматическое включение резервного питания
АПВ на воздушных линиях
Автоматическое повторное включение и автоматическое включение резервного питания
Автоматическое включение резервного питания
Автоматическое повторное включение и автоматическое включение резервного питания
Автоматическое включение резервного питания

Автоматическое повторное включение и автоматическое включение резервного питания
Схема питания с устройством
Автоматическое повторное включение и автоматическое включение резервного питания
Схема питания с устройством
 The Labour Way is the Better Way
The Labour Way is the Better Way Цели внутреннего контроля и аудита финансового бизнес-цикла и его функции
Цели внутреннего контроля и аудита финансового бизнес-цикла и его функции Кёнигсбергские ворота
Кёнигсбергские ворота Освещение промышленных зданий. Защита от шума и вибрации в производственных зданиях
Освещение промышленных зданий. Защита от шума и вибрации в производственных зданиях «Собственник и наемный менеджер в управлении компанией »
«Собственник и наемный менеджер в управлении компанией » Презентация Праздничный шар урок технологии
Презентация Праздничный шар урок технологии Компьютерная схемотехника
Компьютерная схемотехника От печатной книги до интернет-книги
От печатной книги до интернет-книги  Внешнеторговая политика Валютный рынок Савка Н.В., учитель истории и обществознания МОУ «Февральская СОШ №1» 2009г.
Внешнеторговая политика Валютный рынок Савка Н.В., учитель истории и обществознания МОУ «Февральская СОШ №1» 2009г.  Презентация "Русская культура XVI века" - скачать презентации по МХК
Презентация "Русская культура XVI века" - скачать презентации по МХК Комплексная автоматизация распределительных электрических сетей
Комплексная автоматизация распределительных электрических сетей Бессмертный полк в Челябинской области
Бессмертный полк в Челябинской области Рідинна фаза ґрунту. Взаємодія фаз. Характерні вологості. Будівельні властивості ґрунтів. Водно-тепловий режим ґрунту
Рідинна фаза ґрунту. Взаємодія фаз. Характерні вологості. Будівельні властивості ґрунтів. Водно-тепловий режим ґрунту Презентация Особенности правового регулирования морских перевозок
Презентация Особенности правового регулирования морских перевозок Авторы: Мирная Анна, 8 класс «Д» Скоркина Анастасия, 11 класс «А» Кондрашова Мария, 8 класс «А» Власичева Ульяна, 9 класс «В» Кирилл
Авторы: Мирная Анна, 8 класс «Д» Скоркина Анастасия, 11 класс «А» Кондрашова Мария, 8 класс «А» Власичева Ульяна, 9 класс «В» Кирилл Контроль за исполнением управленческих решений
Контроль за исполнением управленческих решений 12) темперамент в упр персоналом
12) темперамент в упр персоналом Цифровые многоканальные телекоммуникационные системы
Цифровые многоканальные телекоммуникационные системы Урок математики в 1 классе
Урок математики в 1 классе Дифференциальный диагноз при синкопальных состояниях Кафедра госпитальной терапии КГМА Профессор Б.Ф.Немцов
Дифференциальный диагноз при синкопальных состояниях Кафедра госпитальной терапии КГМА Профессор Б.Ф.Немцов  Термодинамические характеристики многокомпонентных систем
Термодинамические характеристики многокомпонентных систем Акушерский травматизм
Акушерский травматизм Программа Слёта студентов вузов физической культуры и спорта. 120 лет международному олимпийскому движению
Программа Слёта студентов вузов физической культуры и спорта. 120 лет международному олимпийскому движению Становление бизнеса в партнерстве с банком 2011 г
Становление бизнеса в партнерстве с банком 2011 г Скульптура Древней Греции
Скульптура Древней Греции Театр и кино в годы войны
Театр и кино в годы войны Обоснование строительства Ейской ВЭС- 50 мвт
Обоснование строительства Ейской ВЭС- 50 мвт Архитектура Эпохи Возрождения
Архитектура Эпохи Возрождения