- Динамика стержневых систем с распределенными массами 2

Содержание
- 2. Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой x A (x) q (x,t) F (t) u (x,t)
- 3. Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой x A (x) q (x,t) F (t) u (x,t)
- 4. Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой x A (x) q (x,t) F (t) u (x,t)
- 5. Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой x A (x) q (x,t) F (t) u (x,t)
- 6. Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой x A (x) q (x,t) F (t) u (x,t)
- 7. Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой x A (x) q (x,t) F (t) u (x,t)
- 8. Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой x A (x) q (x,t) F (t) u (x,t)
- 9. Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой x A (x) q (x,t) F (t) u (x,t)
- 10. Динамическое кручение прямолинейного стержня с распределённой массой x A (x) m (x,t) M (t) ϕ(x,t) am
- 11. Динамическое кручение прямолинейного стержня с распределённой массой x A (x) m (x,t) M (t) ϕ(x,t) am
- 12. Динамическое кручение прямолинейного стержня с распределённой массой x A (x) m (x,t) M (t) ϕ(x,t) am
- 13. Динамическое кручение прямолинейного стержня с распределённой массой x A (x) m (x,t) M (t) ϕ(x,t) am
- 14. Динамическое кручение прямолинейного стержня с распределённой массой x A (x) m (x,t) M (t) ϕ(x,t) am
- 15. Понятие о динамических расчётах стержневых систем с распределёнными массами методом перемещений при гармонических колебаниях F (t)
- 17. Скачать презентацию
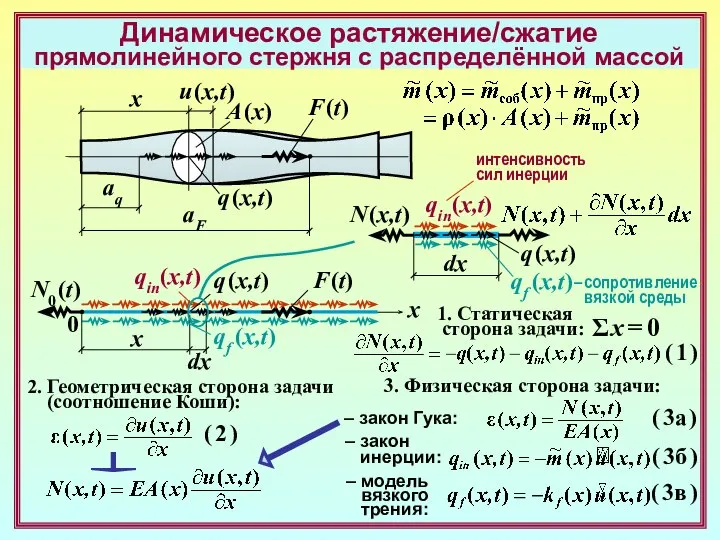
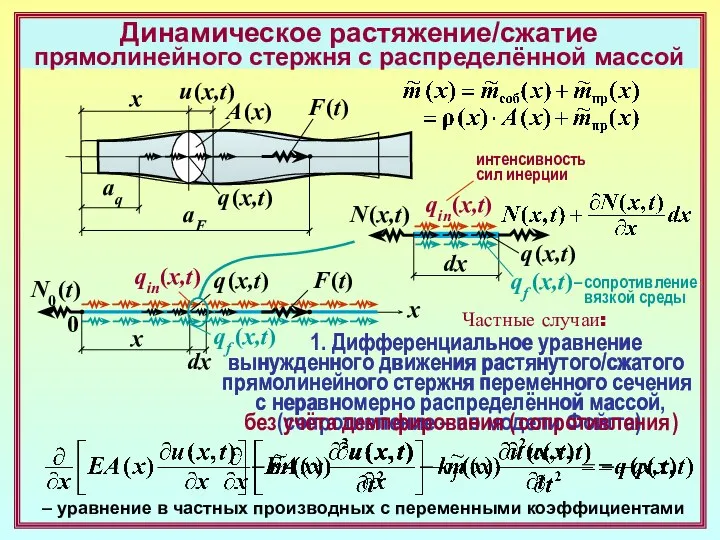
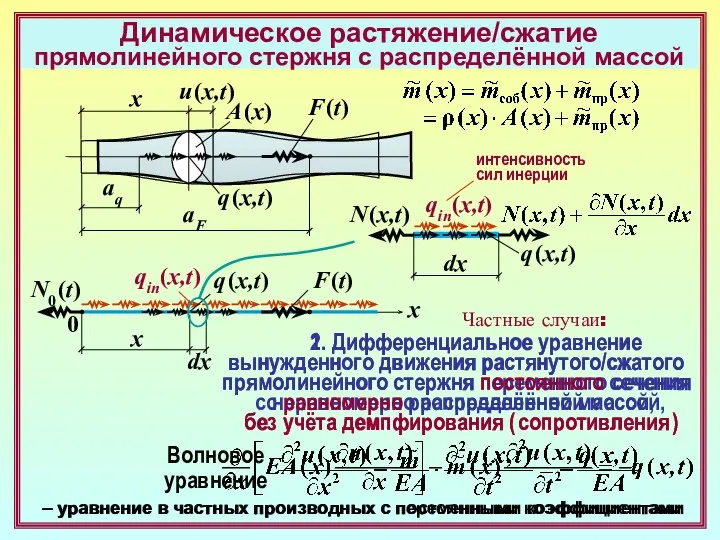
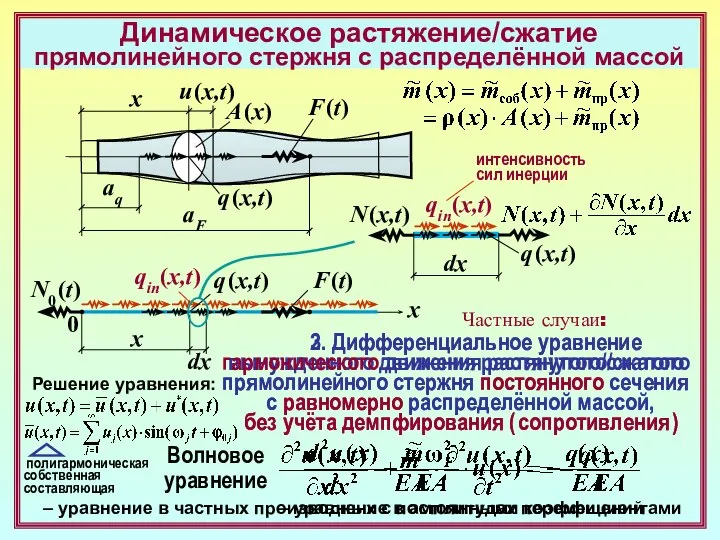
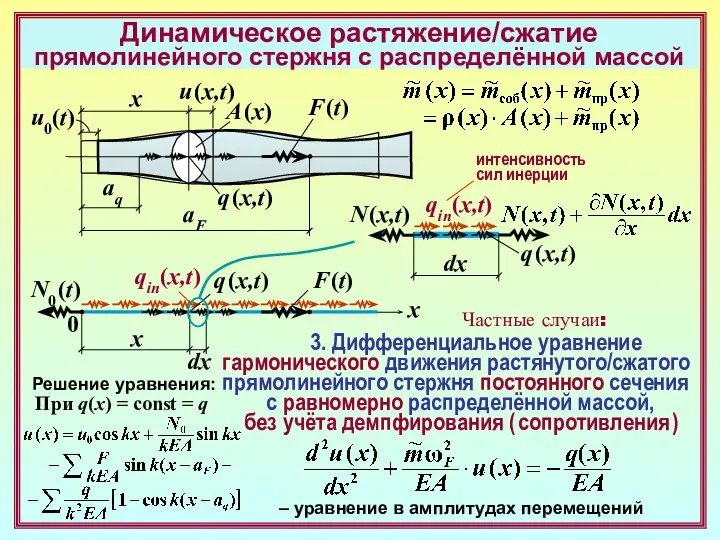
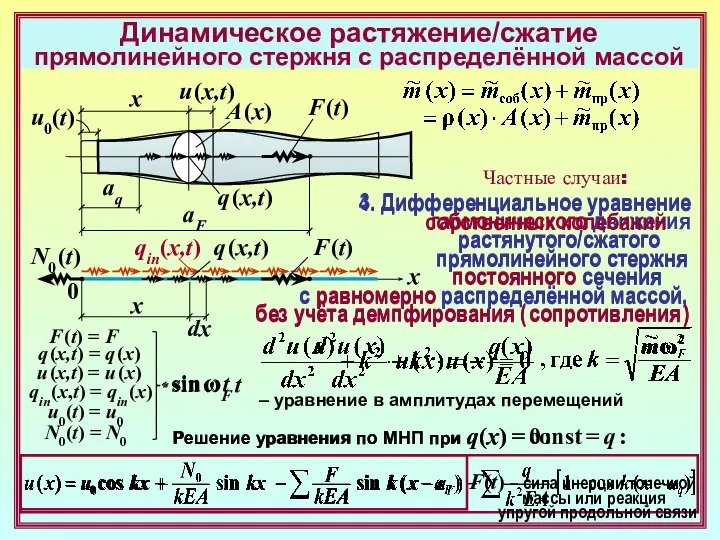
Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой
x
A (x)
q (x,t)
F (t)
u (x,t)
aq
aF
x
x
dx
q
Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой
x
A (x)
q (x,t)
F (t)
u (x,t)
aq
aF
x
x
dx
q

Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой
x
A (x)
q (x,t)
F (t)
u (x,t)
aq
aF
x
x
dx
q
Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой
x
A (x)
q (x,t)
F (t)
u (x,t)
aq
aF
x
x
dx
q

Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой
x
A (x)
q (x,t)
F (t)
u (x,t)
aq
aF
x
x
dx
q
Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой
x
A (x)
q (x,t)
F (t)
u (x,t)
aq
aF
x
x
dx
q
Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой
x
A (x)
q (x,t)
F (t)
u (x,t)
aq
aF
x
x
dx
q
Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой
x
A (x)
q (x,t)
F (t)
u (x,t)
aq
aF
x
x
dx
q
Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой
x
A (x)
q (x,t)
F (t)
u (x,t)
aq
aF
x
x
dx
q
Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой
x
A (x)
q (x,t)
F (t)
u (x,t)
aq
aF
x
x
dx
q
Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой
x
A (x)
q (x,t)
F (t)
u (x,t)
aq
aF
x
x
dx
q
Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой
x
A (x)
q (x,t)
F (t)
u (x,t)
aq
aF
x
x
dx
q
Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой
x
A (x)
q (x,t)
F (t)
u (x,t)
aq
aF
x
x
dx
q
Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой
x
A (x)
q (x,t)
F (t)
u (x,t)
aq
aF
x
x
dx
q
Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой
x
A (x)
q (x,t)
F (t)
u (x,t)
aq
aF
x
x
dx
q
Динамическое растяжение/сжатие прямолинейного стержня с распределённой массой
x
A (x)
q (x,t)
F (t)
u (x,t)
aq
aF
x
x
dx
q

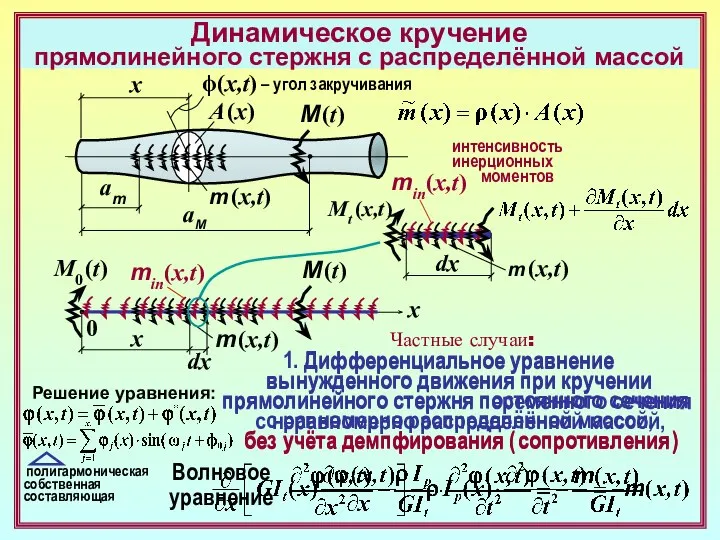
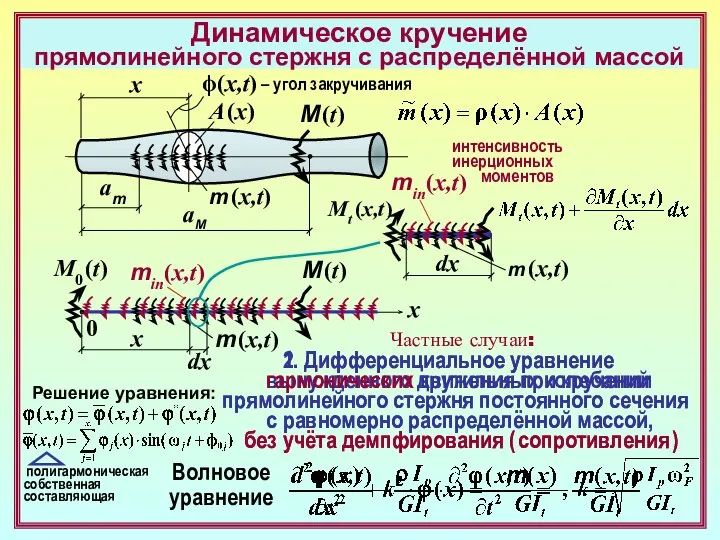
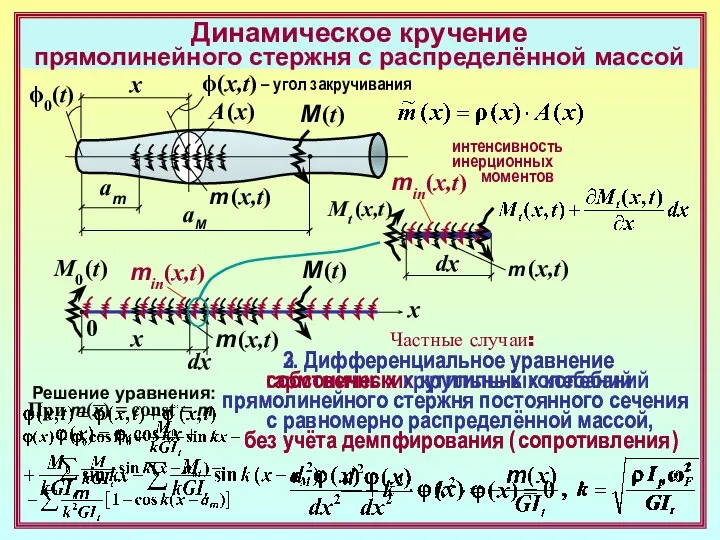
Динамическое кручение
прямолинейного стержня с распределённой массой
x
A (x)
m (x,t)
M (t)
ϕ(x,t)
am
aM
x
x
dx
min(x,t)
0
M0 (t)
dx
Mt
Динамическое кручение
прямолинейного стержня с распределённой массой
x
A (x)
m (x,t)
M (t)
ϕ(x,t)
am
aM
x
x
dx
min(x,t)
0
M0 (t)
dx
Mt

Динамическое кручение
прямолинейного стержня с распределённой массой
x
A (x)
m (x,t)
M (t)
ϕ(x,t)
am
aM
x
x
dx
min(x,t)
0
M0 (t)
dx
Mt
Динамическое кручение
прямолинейного стержня с распределённой массой
x
A (x)
m (x,t)
M (t)
ϕ(x,t)
am
aM
x
x
dx
min(x,t)
0
M0 (t)
dx
Mt
Динамическое кручение
прямолинейного стержня с распределённой массой
x
A (x)
m (x,t)
M (t)
ϕ(x,t)
am
aM
x
x
dx
min(x,t)
0
M0 (t)
dx
Mt
Динамическое кручение
прямолинейного стержня с распределённой массой
x
A (x)
m (x,t)
M (t)
ϕ(x,t)
am
aM
x
x
dx
min(x,t)
0
M0 (t)
dx
Mt
Динамическое кручение
прямолинейного стержня с распределённой массой
x
A (x)
m (x,t)
M (t)
ϕ(x,t)
am
aM
x
x
dx
min(x,t)
0
M0 (t)
dx
Mt
Динамическое кручение
прямолинейного стержня с распределённой массой
x
A (x)
m (x,t)
M (t)
ϕ(x,t)
am
aM
x
x
dx
min(x,t)
0
M0 (t)
dx
Mt
Динамическое кручение
прямолинейного стержня с распределённой массой
x
A (x)
m (x,t)
M (t)
ϕ(x,t)
am
aM
x
x
dx
min(x,t)
0
M0 (t)
dx
Mt
Динамическое кручение
прямолинейного стержня с распределённой массой
x
A (x)
m (x,t)
M (t)
ϕ(x,t)
am
aM
x
x
dx
min(x,t)
0
M0 (t)
dx
Mt
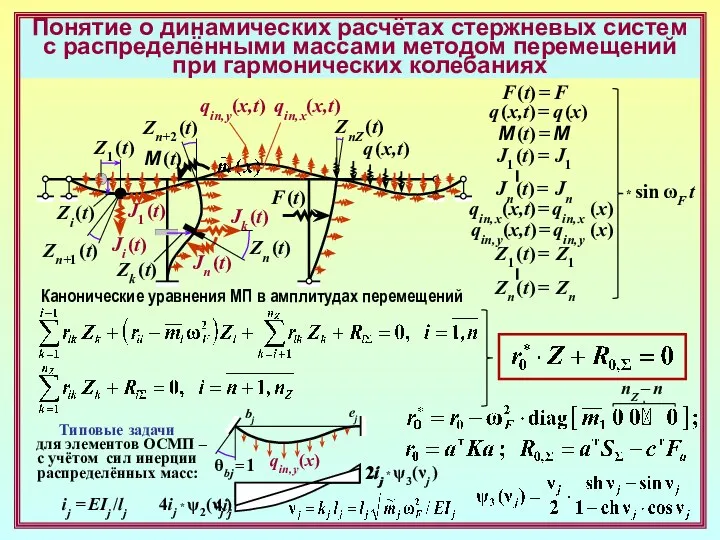
Понятие о динамических расчётах стержневых систем
с распределёнными массами методом перемещений
при гармонических
Понятие о динамических расчётах стержневых систем с распределёнными массами методом перемещений при гармонических
 SMARTGOTRENDY_updated (1) (2)
SMARTGOTRENDY_updated (1) (2) Презентация "Ставни и наличники" - скачать презентации по МХК
Презентация "Ставни и наличники" - скачать презентации по МХК Спільне використання ресурсів локальної мережі
Спільне використання ресурсів локальної мережі Антигипертензивные средства (АГС)
Антигипертензивные средства (АГС)  Логически основи в компютъра Изготвил: София Копанарова
Логически основи в компютъра Изготвил: София Копанарова Аттестационная работа. Создание творческого проекта «Традиционные украшения Заонежья»
Аттестационная работа. Создание творческого проекта «Традиционные украшения Заонежья» Япония
Япония Мой дом – моя крепость День Семьи
Мой дом – моя крепость День Семьи Мeine Heimat. 7 Klasse
Мeine Heimat. 7 Klasse Презентация на тему "Ртуть Отравления ртутью Первая медицинская помощь" - скачать презентации по Медицине
Презентация на тему "Ртуть Отравления ртутью Первая медицинская помощь" - скачать презентации по Медицине Современные рыцари
Современные рыцари СИНДРОМ МАЛОГО СЕРДЕЧНОГО ВЫБРОСА: КЛИНИКА, ДИАГНОСТИКА, ЛЕЧЕНИЕ, ПРОФИЛАКТИКА
СИНДРОМ МАЛОГО СЕРДЕЧНОГО ВЫБРОСА: КЛИНИКА, ДИАГНОСТИКА, ЛЕЧЕНИЕ, ПРОФИЛАКТИКА  Фазы напряженного состояния грунта
Фазы напряженного состояния грунта Разъяснения по заполнению заявления-анкеты на получение повышенной стипендии
Разъяснения по заполнению заявления-анкеты на получение повышенной стипендии Влияние на рост школьника занятия тяжелой атлетикой. 8 класс
Влияние на рост школьника занятия тяжелой атлетикой. 8 класс Анализ производства и реализации
Анализ производства и реализации Телевизионные преобразователи. Датчики телевизионных сигналов и их характеристики. Передающие телевизионные трубки. (Лекция 6)
Телевизионные преобразователи. Датчики телевизионных сигналов и их характеристики. Передающие телевизионные трубки. (Лекция 6) Организационная культура
Организационная культура Методы структурированной оценки: SWOT анализ, концептуальная карта, цветовое голосование Вадим Маршаков Екатерина Кузнецова Ю
Методы структурированной оценки: SWOT анализ, концептуальная карта, цветовое голосование Вадим Маршаков Екатерина Кузнецова Ю Робер Дуано – ироничный наблюдатель, лиричный и великий фотограф-гуманист
Робер Дуано – ироничный наблюдатель, лиричный и великий фотограф-гуманист иван грозный
иван грозный Доходы и расходы семьи. Стоимость жизни.
Доходы и расходы семьи. Стоимость жизни.  Диаграмма Парето – определение и назначение
Диаграмма Парето – определение и назначение Управление инновационными процессами в школе
Управление инновационными процессами в школе Духовная культура
Духовная культура РОССИЙСКИЙ ЭЛЕКТРОТЕХНИЧЕСКИЙ КОНЦЕРН «РУСЭЛПРОМ» Объединение предприятий по производству электротехнического оборудования и
РОССИЙСКИЙ ЭЛЕКТРОТЕХНИЧЕСКИЙ КОНЦЕРН «РУСЭЛПРОМ» Объединение предприятий по производству электротехнического оборудования и  Ландшафтное проектирование. Причины и методы реконструкции зеленых насаждений
Ландшафтное проектирование. Причины и методы реконструкции зеленых насаждений Специальность Физическая культура
Специальность Физическая культура