- Геом Поиск Локализация

Содержание
- 2. 06.04.2007 Геометрический поиск Локализация точки 2 Геометрический поиск Планарные графы. Планарное прямолинейное подразбиение плоскости Представление ППЛГ.
- 3. 06.04.2007 Геометрический поиск Локализация точки 2 Геометрический поиск Планарные графы Планарное прямолинейное подразбиение плоскости Граф G
- 4. 06.04.2007 Геометрический поиск Локализация точки 2 Формула Эйлера: n + l = m + 2 G
- 5. 06.04.2007 Геометрический поиск Локализация точки 2 Стереографическая проекция v v′ N
- 6. 06.04.2007 Геометрический поиск Локализация точки 2 Следствие 1: Во всяком выпуклом многограннике n + l =
- 7. 06.04.2007 Геометрический поиск Локализация точки 2 Следствие 2б: Для связного планарного графа l ≤ 2n –
- 8. 06.04.2007 Геометрический поиск Локализация точки 2 Плоские триангуляции Триангуляция: все конечные грани – треугольники. Триангуляция множества
- 9. 06.04.2007 Геометрический поиск Локализация точки 2 Представление ППЛГ Реберный список с двойными связями (РСДС) Основная компонента
- 10. 06.04.2007 Геометрический поиск Локализация точки 2 Представление ППЛГ Реберный список с двойными связями (РСДС) e1 e6
- 11. 06.04.2007 Геометрический поиск Локализация точки 2 массивы входов: по вершинам head_V [1..n] по граням head_F [1..l]
- 12. 06.04.2007 Геометрический поиск Локализация точки 2 Представление ППЛГ Реберный список с двойными связями (РСДС) Процедура «Инцидентные
- 13. 06.04.2007 Геометрический поиск Локализация точки 2 Представление ППЛГ Реберный список с двойными связями (РСДС) Процедура «Граница
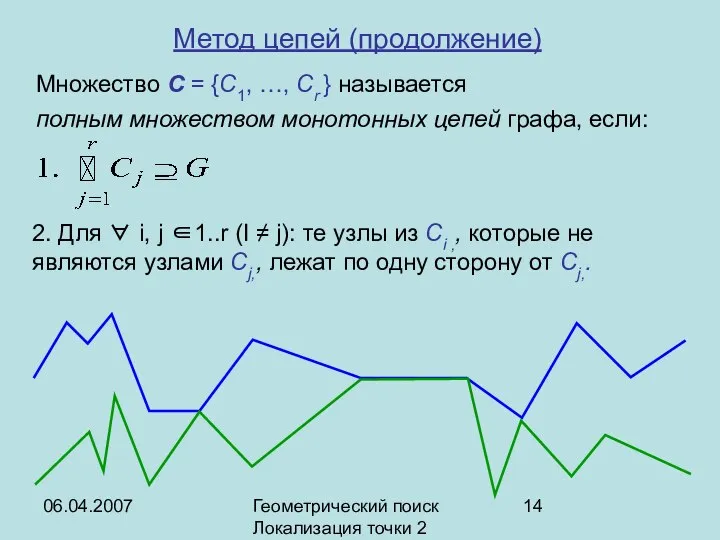
- 14. 06.04.2007 Геометрический поиск Локализация точки 2 Множество C = {C1, …, Cr } называется полным множеством
- 15. 06.04.2007 Геометрический поиск Локализация точки 2 Построение ПММЦ Балансировка весов ребер 1 1 1 1 1
- 16. 06.04.2007 Геометрический поиск Локализация точки 2 Регуляризация графа Метод заметания
- 17. 06.04.2007 Геометрический поиск Локализация точки 2 Метод детализации триангуляции См. Документ MWord «Локализация точки» (п.1.3) в
- 19. Скачать презентацию

06.04.2007
Геометрический поиск Локализация точки 2
Геометрический поиск
Планарные графы. Планарное прямолинейное подразбиение плоскости
Представление
06.04.2007
Геометрический поиск Локализация точки 2
Геометрический поиск
Планарные графы. Планарное прямолинейное подразбиение плоскости
Представление
06.04.2007
Геометрический поиск Локализация точки 2
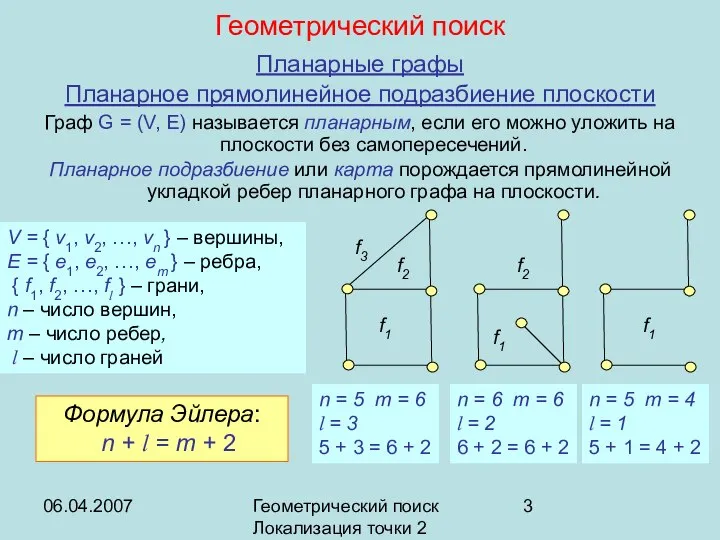
Геометрический поиск
Планарные графы
Планарное прямолинейное подразбиение плоскости
Граф G
06.04.2007
Геометрический поиск Локализация точки 2
Геометрический поиск
Планарные графы
Планарное прямолинейное подразбиение плоскости
Граф G
06.04.2007
Геометрический поиск Локализация точки 2
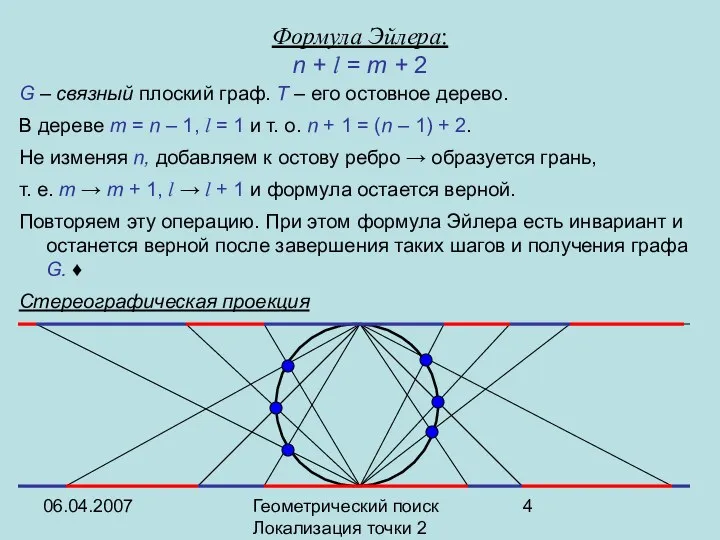
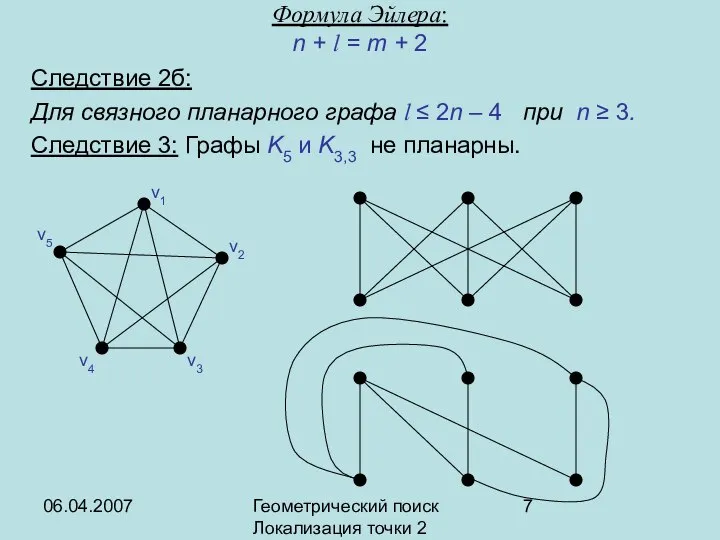
Формула Эйлера:
n + l = m +
06.04.2007
Геометрический поиск Локализация точки 2
Формула Эйлера: n + l = m +
06.04.2007
Геометрический поиск Локализация точки 2
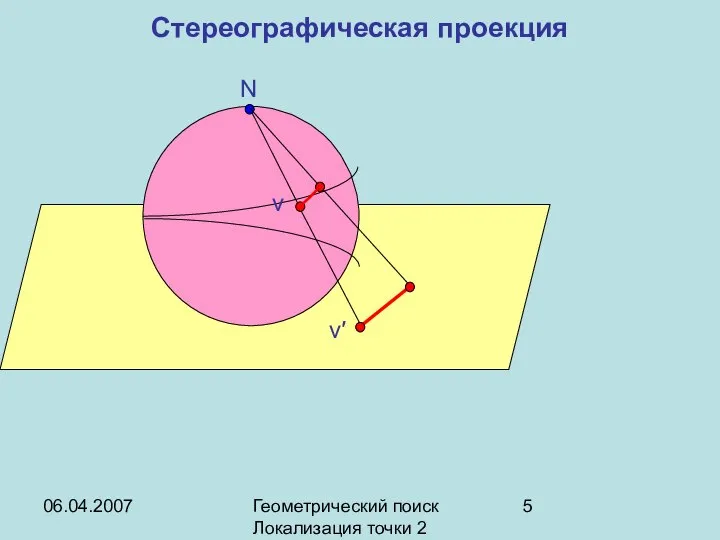
Стереографическая проекция
v
v′
N
06.04.2007
Геометрический поиск Локализация точки 2
Стереографическая проекция
v
v′
N
06.04.2007
Геометрический поиск Локализация точки 2
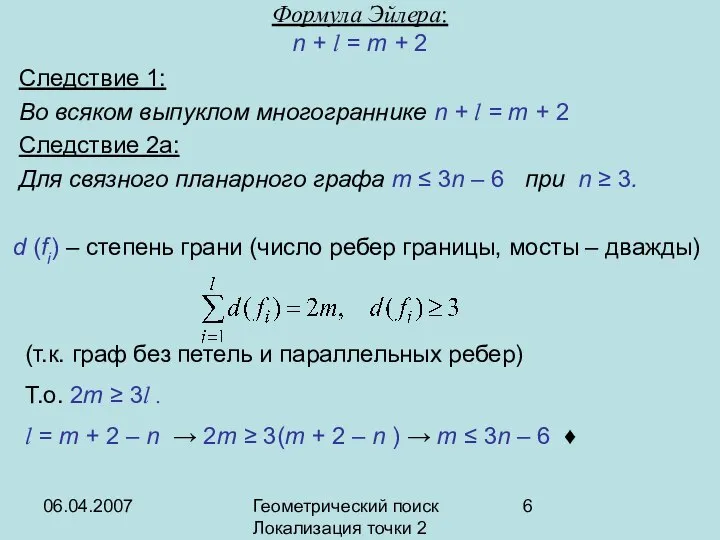
Следствие 1:
Во всяком выпуклом многограннике n
06.04.2007
Геометрический поиск Локализация точки 2
Следствие 1:
Во всяком выпуклом многограннике n
06.04.2007
Геометрический поиск Локализация точки 2
Следствие 2б:
Для связного планарного графа l ≤
06.04.2007
Геометрический поиск Локализация точки 2
Следствие 2б:
Для связного планарного графа l ≤
06.04.2007
Геометрический поиск Локализация точки 2
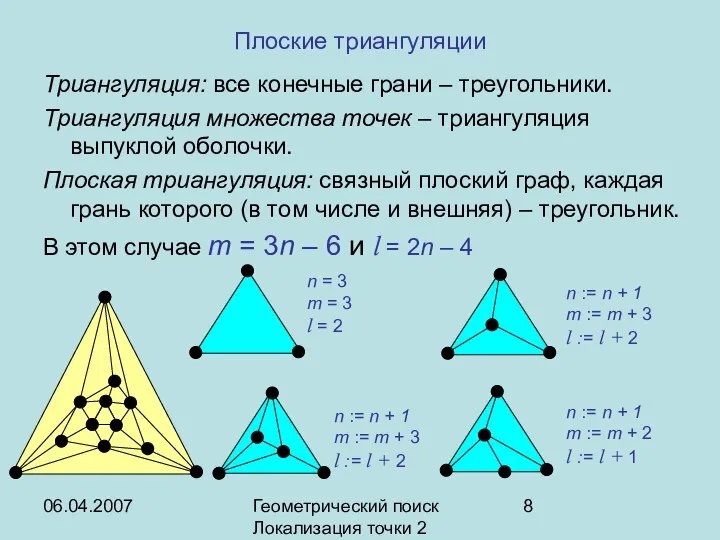
Плоские триангуляции
Триангуляция: все конечные грани – треугольники.
Триангуляция
06.04.2007
Геометрический поиск Локализация точки 2
Плоские триангуляции
Триангуляция: все конечные грани – треугольники.
Триангуляция

06.04.2007
Геометрический поиск Локализация точки 2
Представление ППЛГ
Реберный список с двойными связями (РСДС)
06.04.2007
Геометрический поиск Локализация точки 2
Представление ППЛГ Реберный список с двойными связями (РСДС)

06.04.2007
Геометрический поиск Локализация точки 2
Представление ППЛГ
Реберный список с двойными связями (РСДС)
06.04.2007
Геометрический поиск Локализация точки 2
Представление ППЛГ Реберный список с двойными связями (РСДС)

06.04.2007
Геометрический поиск Локализация точки 2
массивы входов:
по вершинам head_V [1..n]
по граням
06.04.2007
Геометрический поиск Локализация точки 2
массивы входов:
по вершинам head_V [1..n]
по граням
06.04.2007
Геометрический поиск Локализация точки 2
Представление ППЛГ
Реберный список с двойными связями (РСДС)
06.04.2007
Геометрический поиск Локализация точки 2
Представление ППЛГ Реберный список с двойными связями (РСДС)
06.04.2007
Геометрический поиск Локализация точки 2
Представление ППЛГ
Реберный список с двойными связями (РСДС)
06.04.2007
Геометрический поиск Локализация точки 2
Представление ППЛГ Реберный список с двойными связями (РСДС)
06.04.2007
Геометрический поиск Локализация точки 2
Множество C = {C1, …, Cr }
06.04.2007
Геометрический поиск Локализация точки 2
Множество C = {C1, …, Cr }
06.04.2007
Геометрический поиск Локализация точки 2
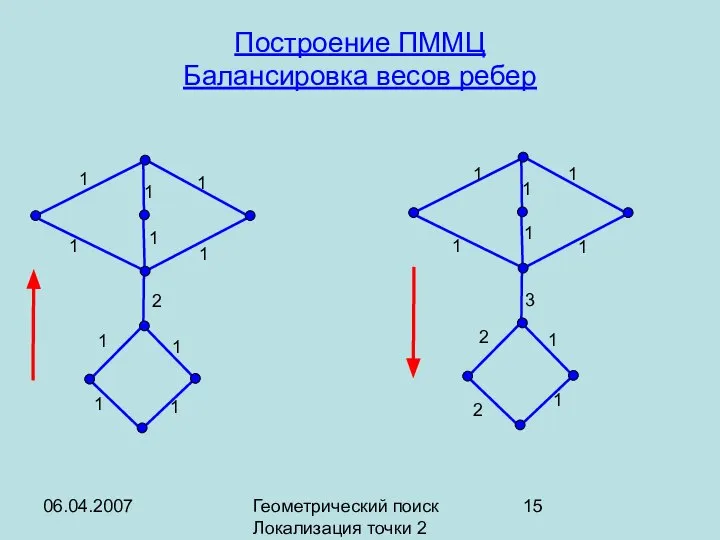
Построение ПММЦ
Балансировка весов ребер
1
1
1
1
1
1
1
1
1
2
1
1
1
1
1
1
1
3
1
2
2
1
06.04.2007
Геометрический поиск Локализация точки 2
Построение ПММЦ
Балансировка весов ребер
1
1
1
1
1
1
1
1
1
2
1
1
1
1
1
1
1
3
1
2
2
1
06.04.2007
Геометрический поиск Локализация точки 2
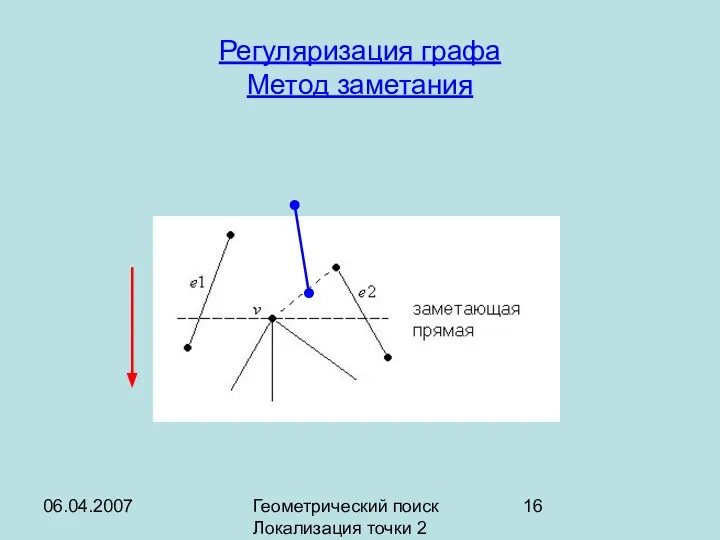
Регуляризация графа
Метод заметания
06.04.2007
Геометрический поиск Локализация точки 2
Регуляризация графа
Метод заметания
06.04.2007
Геометрический поиск Локализация точки 2
Метод детализации триангуляции
См. Документ MWord «Локализация точки»
06.04.2007
Геометрический поиск Локализация точки 2
Метод детализации триангуляции
См. Документ MWord «Локализация точки»
 ВКР: Реконструкция трансформаторной подстанции
ВКР: Реконструкция трансформаторной подстанции Парные согласные - презентация для начальной школы
Парные согласные - презентация для начальной школы Презентация "Секреты мозаики" - скачать презентации по МХК
Презентация "Секреты мозаики" - скачать презентации по МХК Формирование приверженности персонала крупной компании
Формирование приверженности персонала крупной компании Загадки по ПДД
Загадки по ПДД Кинематика
Кинематика Крым - 2019. Программа "Альпинисты"
Крым - 2019. Программа "Альпинисты" Культура Древнего Рима Мировая художественная культура Урок-презентация Васильева О.Н. Ломовская СОШ Дюдьково 2009
Культура Древнего Рима Мировая художественная культура Урок-презентация Васильева О.Н. Ломовская СОШ Дюдьково 2009 Проектирование локальной вычислительной сети для магазина-склада
Проектирование локальной вычислительной сети для магазина-склада УЧЕТ РАСХОДОВ ПО СТРОИТЕЛЬНЫМ МАШИНАМ И МЕХАНИЗМАМ
УЧЕТ РАСХОДОВ ПО СТРОИТЕЛЬНЫМ МАШИНАМ И МЕХАНИЗМАМ Презентация на тему "Развитие креативных способностей младших школьников средствами творческих заданий в учебном процессе"
Презентация на тему "Развитие креативных способностей младших школьников средствами творческих заданий в учебном процессе"  Бронхолитики
Бронхолитики  Нормативно-правовая база образования детей с ОВЗ Муниципальное общеобразовательное учреждение «Средняя общеобразовательная
Нормативно-правовая база образования детей с ОВЗ Муниципальное общеобразовательное учреждение «Средняя общеобразовательная  Русские игрушки
Русские игрушки Атлас ангиографий
Атлас ангиографий Самостоятельное изучение
Самостоятельное изучение Культура Японии
Культура Японии Проектирование внутримашинного информационного обеспечения ИС
Проектирование внутримашинного информационного обеспечения ИС Яркие новогодние идеи праздничного декора
Яркие новогодние идеи праздничного декора Cegła
Cegła Гидроплазма Water For Life
Гидроплазма Water For Life Презентация Распределительно-логистический центр в системе реализации процесса товародвижения
Презентация Распределительно-логистический центр в системе реализации процесса товародвижения Опухоли желудка
Опухоли желудка  Александр Сергеевич Пушкин в Симбирске
Александр Сергеевич Пушкин в Симбирске Презентация на тему "Расулова А.А. Слова-Иностранцы" - скачать презентации по Педагогике
Презентация на тему "Расулова А.А. Слова-Иностранцы" - скачать презентации по Педагогике Греческая мифология в картинах А. Фанталова
Греческая мифология в картинах А. Фанталова Понятие и виды таможенных пошлин
Понятие и виды таможенных пошлин Презентация на тему "Как избежать умственных перегрузок в процессе обучения?" - скачать презентации по Педагогике
Презентация на тему "Как избежать умственных перегрузок в процессе обучения?" - скачать презентации по Педагогике