- Кутомірні радіотехнічні засоби. Автоматичний радіопеленгатор АРП-11 (тема №4, заняття 2)

Содержание
- 2. ЗМІСТ ЗАНЯТТЯ Вступна частина Основна частина 1. Призначення, склад і загальні ТТХ радіопеленгатора АРП-11. 2. Структурна
- 3. 1. Призначення, склад і загальні ТТХ радіопеленгатора АРП-11.
- 4. Радіопеленгатор АРП-11 призначений для пеленгування ЛА, обладнаних зв’язковими радіостанціями метрового та дециметрового діапазонів хвиль, автоматичної індикації
- 5. До складу радіопеленгатора входять: апаратна; антенно - мачтовий пристрій (АМП); виносна апаратура (ВА); контрольно-випробувальний генератор (КВГ)
- 6. До складу апаратної входять також система вентиляції, пожежної сигналізації та світло огородження. Система вентиляції складається з
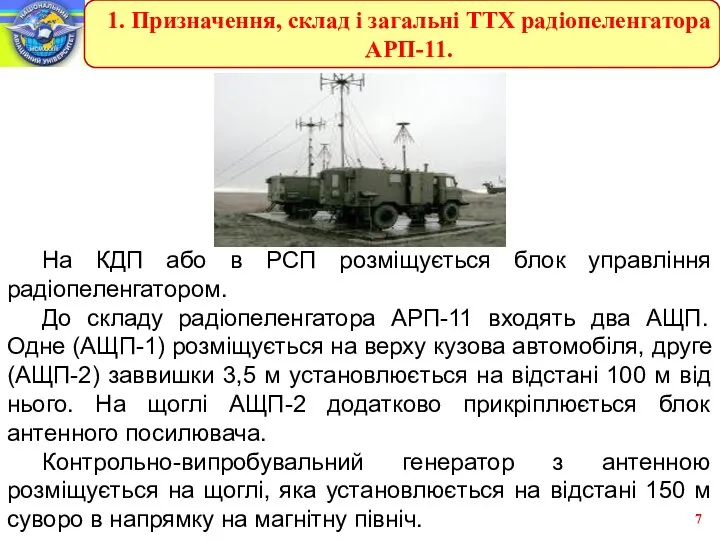
- 7. На КДП або в РСП розміщується блок управління радіопеленгатором. До складу радіопеленгатора АРП-11 входять два АЩП.
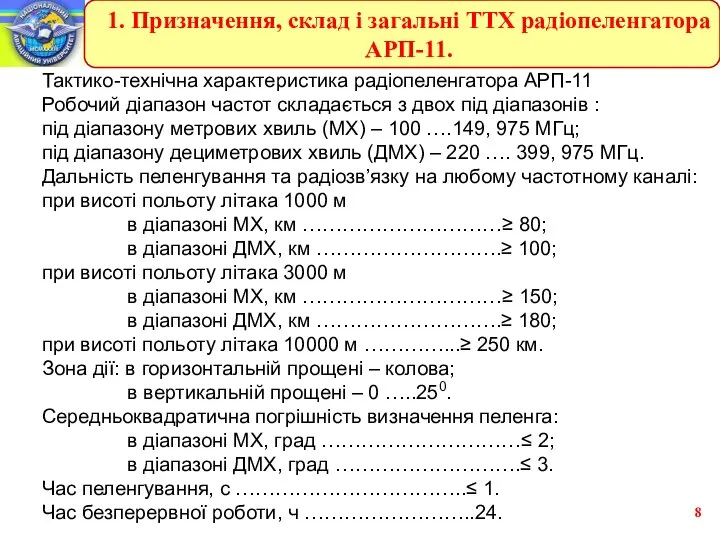
- 8. Тактико-технічна характеристика радіопеленгатора АРП-11 Робочий діапазон частот складається з двох під діапазонів : під діапазону метрових
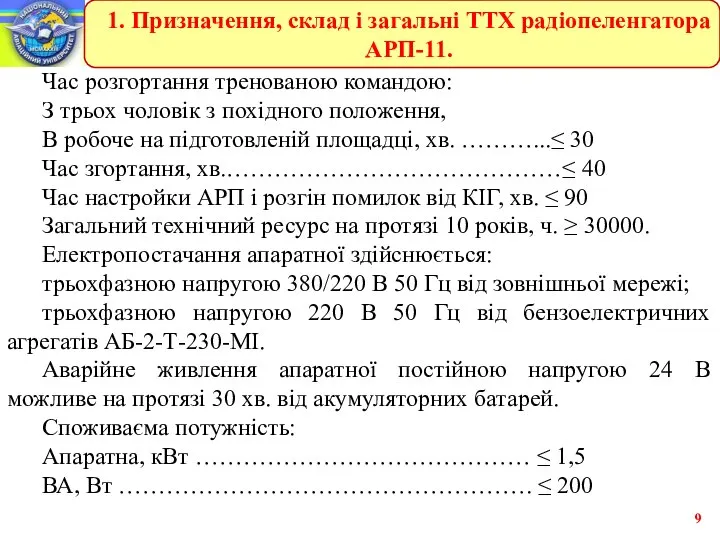
- 9. Час розгортання тренованою командою: З трьох чоловік з похідного положення, В робоче на підготовленій площадці, хв.
- 10. Умови експлуатації: температура оточуючого середовища, рад …….- 50 …50 відносна вологість повітря при температурі 35 0С,
- 11. 2. Структурна схема і принцип дії радіопеленгатора АРП-11.
- 12. Радіопеленгатор АРП-11 (виріб Е-512) – є фазовим радіопеленгатором з електронним скануванням діаграми спрямованості антени вигляду кардіоїди.
- 13. Структурна схема радіопеленгатора АРП-11
- 14. За допомогою антенно-щоглових пристроїв АЩП1 і АЩП2 відбувається прийом сигналів від пеленгованої радіостанції. Генератором опорної напруги
- 15. АРП-11 відноситься до фазових радіопеленгаторів з електронним скануванням діаграми спрямованості антени (ДСА) типу кардіоїди. Електронне сканування
- 16. Скориставшись відомою тригонометричною формулою можна отримати вираз: Як випливає з останнього виразу, бажаний ефект може бути
- 17. Таким чином, найпростішу структурну схему фазового радіопеленгатора з електронним скануванням ДСА типу кардіоїди можна подати у
- 18. Сигнал із неспрямованої антени у вигляді напруги u1(t) і сигнали з виходів балансових модуляторів БМ1 і
- 19. У фазових радіопеленгаторах з механічним і електронним скануванням ДСА може бути застосована як одноканальна, так і
- 21. Сигнал з виходу ПРМ, що являє собою низькочастотну обвідну АМ-коливання та містить у своїй фазі інформацію
- 22. Перевірка працездатності радіопеленгатора в режимі встановленого контролю здійснюється за допомогою вбудованого калібратора. Вихідні напруги ФД кожного
- 24. Скачать презентацию
ЗМІСТ ЗАНЯТТЯ
Вступна частина
Основна частина
1. Призначення, склад і загальні
ЗМІСТ ЗАНЯТТЯ
Вступна частина
Основна частина
1. Призначення, склад і загальні
1. Призначення, склад і загальні ТТХ радіопеленгатора АРП-11.
1. Призначення, склад і загальні ТТХ радіопеленгатора АРП-11.
Радіопеленгатор АРП-11 призначений для пеленгування ЛА, обладнаних зв’язковими радіостанціями метрового та
Радіопеленгатор АРП-11 призначений для пеленгування ЛА, обладнаних зв’язковими радіостанціями метрового та
До складу радіопеленгатора входять:
апаратна;
антенно - мачтовий пристрій (АМП);
виносна апаратура (ВА);
контрольно-випробувальний генератор
До складу радіопеленгатора входять:
апаратна;
антенно - мачтовий пристрій (АМП);
виносна апаратура (ВА);
контрольно-випробувальний генератор
До складу апаратної входять також система вентиляції, пожежної сигналізації та світло
До складу апаратної входять також система вентиляції, пожежної сигналізації та світло
На КДП або в РСП розміщується блок управління радіопеленгатором.
До складу радіопеленгатора
На КДП або в РСП розміщується блок управління радіопеленгатором.
До складу радіопеленгатора
Тактико-технічна характеристика радіопеленгатора АРП-11
Робочий діапазон частот складається з двох під
Тактико-технічна характеристика радіопеленгатора АРП-11
Робочий діапазон частот складається з двох під
Час розгортання тренованою командою:
З трьох чоловік з похідного положення,
В робоче на
Час розгортання тренованою командою:
З трьох чоловік з похідного положення,
В робоче на
Умови експлуатації:
температура оточуючого середовища, рад …….- 50 …50
відносна вологість повітря
при температурі
Умови експлуатації:
температура оточуючого середовища, рад …….- 50 …50
відносна вологість повітря
при температурі
2. Структурна схема і принцип дії радіопеленгатора АРП-11.
2. Структурна схема і принцип дії радіопеленгатора АРП-11.
Радіопеленгатор АРП-11 (виріб Е-512) – є фазовим радіопеленгатором з
Радіопеленгатор АРП-11 (виріб Е-512) – є фазовим радіопеленгатором з
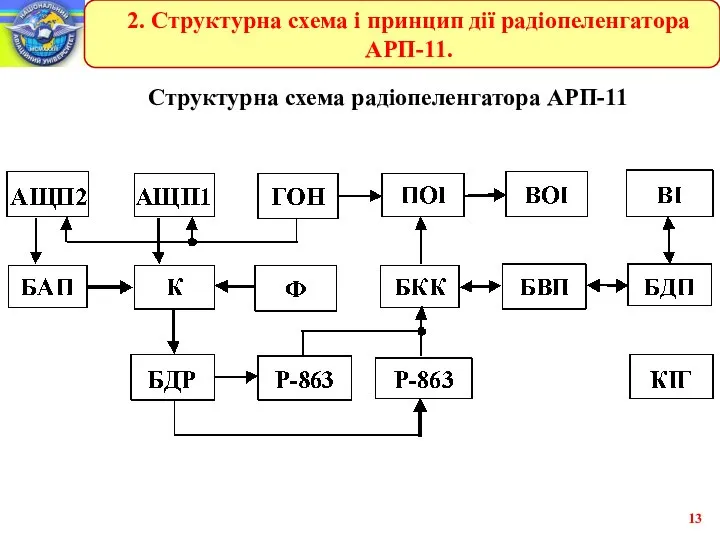
Структурна схема радіопеленгатора АРП-11
Структурна схема радіопеленгатора АРП-11
За допомогою антенно-щоглових пристроїв АЩП1 і АЩП2 відбувається прийом
За допомогою антенно-щоглових пристроїв АЩП1 і АЩП2 відбувається прийом
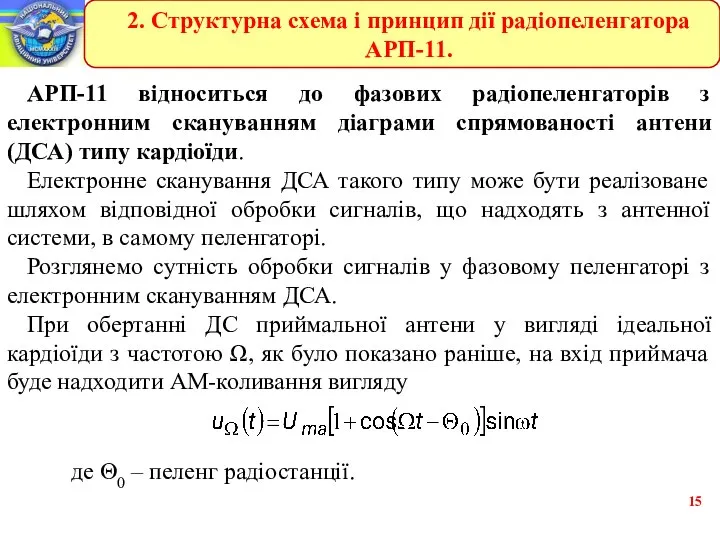
АРП-11 відноситься до фазових радіопеленгаторів з електронним скануванням діаграми спрямованості
АРП-11 відноситься до фазових радіопеленгаторів з електронним скануванням діаграми спрямованості
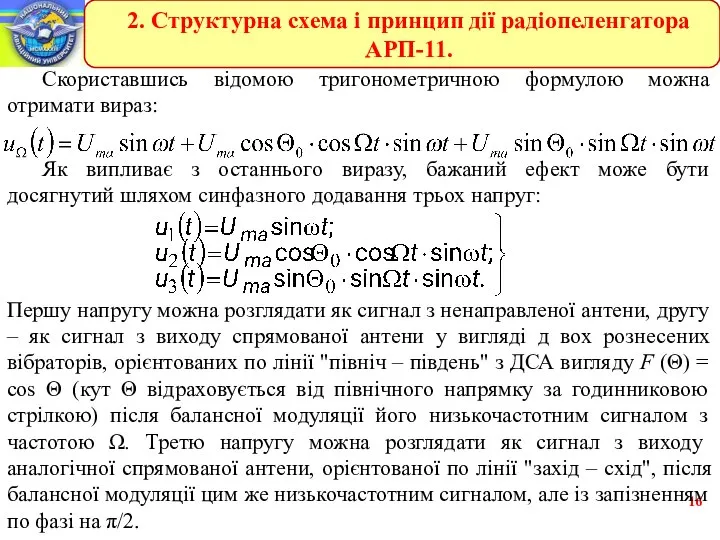
Скориставшись відомою тригонометричною формулою можна отримати вираз:
Як випливає з
Скориставшись відомою тригонометричною формулою можна отримати вираз:
Як випливає з
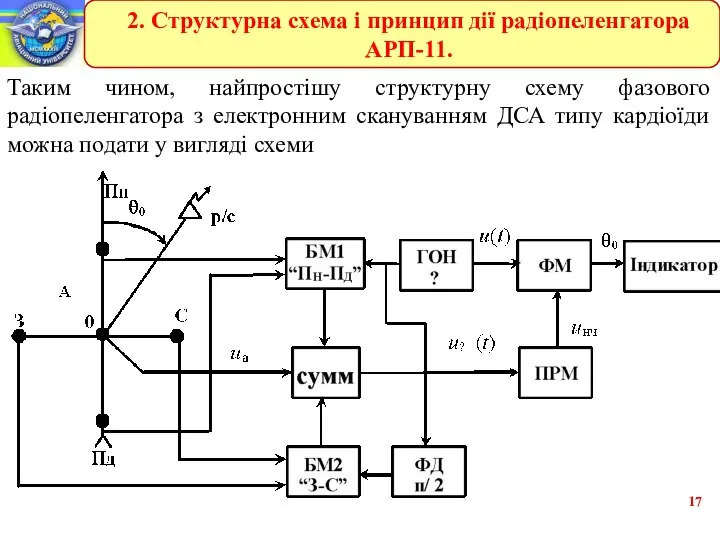
Таким чином, найпростішу структурну схему фазового радіопеленгатора з електронним
Таким чином, найпростішу структурну схему фазового радіопеленгатора з електронним
Сигнал із неспрямованої антени у вигляді напруги u1(t) і
Сигнал із неспрямованої антени у вигляді напруги u1(t) і
У фазових радіопеленгаторах з механічним і електронним скануванням ДСА
У фазових радіопеленгаторах з механічним і електронним скануванням ДСА

Сигнал з виходу ПРМ, що являє собою низькочастотну обвідну
Сигнал з виходу ПРМ, що являє собою низькочастотну обвідну
Перевірка працездатності радіопеленгатора в режимі встановленого контролю здійснюється за
Перевірка працездатності радіопеленгатора в режимі встановленого контролю здійснюється за
 Тест. Экстремальное программирование
Тест. Экстремальное программирование Презентация Трудности и опасности выхода на внешние рынки и осуществления внешнеэкономической деятельности
Презентация Трудности и опасности выхода на внешние рынки и осуществления внешнеэкономической деятельности  «Проектирование образовательной программы дошкольной организации в условиях внедрения «Проектирование образовательной прогр
«Проектирование образовательной программы дошкольной организации в условиях внедрения «Проектирование образовательной прогр Протокол MGCP
Протокол MGCP Терроризм. Причины терроризма
Терроризм. Причины терроризма Модели развития экономики на базе производственных функций
Модели развития экономики на базе производственных функций Домашняя утварь в крестьянском доме
Домашняя утварь в крестьянском доме АНАТОМИЯ ЧЕРЕПА сдудентам занятие
АНАТОМИЯ ЧЕРЕПА сдудентам занятие Презентация "Копилка. Психологические особенности накопления денег в подростковом возрасте" - скачать презентации по Эконом
Презентация "Копилка. Психологические особенности накопления денег в подростковом возрасте" - скачать презентации по Эконом Лицензирование фармацевтической деятельности
Лицензирование фармацевтической деятельности Почему наша реклама действительно работает.
Почему наша реклама действительно работает. Презентация на тему Обмен жиров в организме
Презентация на тему Обмен жиров в организме McDonalds Logo - презентация
McDonalds Logo - презентация Финансовое и денежно-кредитное регулирование
Финансовое и денежно-кредитное регулирование Stunde
Stunde Системы автоматизированного программирования обработки на станках с ЧПУ их структура и классификация
Системы автоматизированного программирования обработки на станках с ЧПУ их структура и классификация Авторский семинар Варламова П.П., учителя географии и экологии высшей квалификационной категории МБОУ «Кептинская СОШ» по тем
Авторский семинар Варламова П.П., учителя географии и экологии высшей квалификационной категории МБОУ «Кептинская СОШ» по тем Диалектика. Диктатура. Демократия. Сущность, основные характеристики
Диалектика. Диктатура. Демократия. Сущность, основные характеристики Паніровка
Паніровка Дифференциальная диагностика опухолей средостения.
Дифференциальная диагностика опухолей средостения. Презентация "Художественная культура Древней и Средневековой Японии" - скачать презентации по МХК
Презентация "Художественная культура Древней и Средневековой Японии" - скачать презентации по МХК Презентация Европейская валютная система
Презентация Европейская валютная система Ремёсла и украшения древнейших людей
Ремёсла и украшения древнейших людей Основные понятия и определения статики
Основные понятия и определения статики ФОНТАНЫ: история и современность
ФОНТАНЫ: история и современность Государственное регулирование предпринимательской деятельности Выполнил студент 2 курса ФТД группы Т-091 Карпачёв Вячеслав
Государственное регулирование предпринимательской деятельности Выполнил студент 2 курса ФТД группы Т-091 Карпачёв Вячеслав Мир хозяйства в общественном сознании докапиталистических эпох
Мир хозяйства в общественном сознании докапиталистических эпох Определение религии
Определение религии