- Линейный поиск

Содержание
- 2. Линейный поиск Методика линейного поиска Рассмотрим итеративные методы, останавливающиеся при выполнении некоторого критерия останова итеративного процесса.
- 3. Однако простейшая процедура, заключающаяся в выборе достаточно большого начального значения , которое затем уменьшается (делением пополам)
- 4. Это требование обеспечивает некую усредненную скорость спуска на очередной итерации не меньше определенной доли от величины,
- 5. Свойство. Предположим, что для всех . Тогда существует интервал такой, что в методе спуска условия (*)
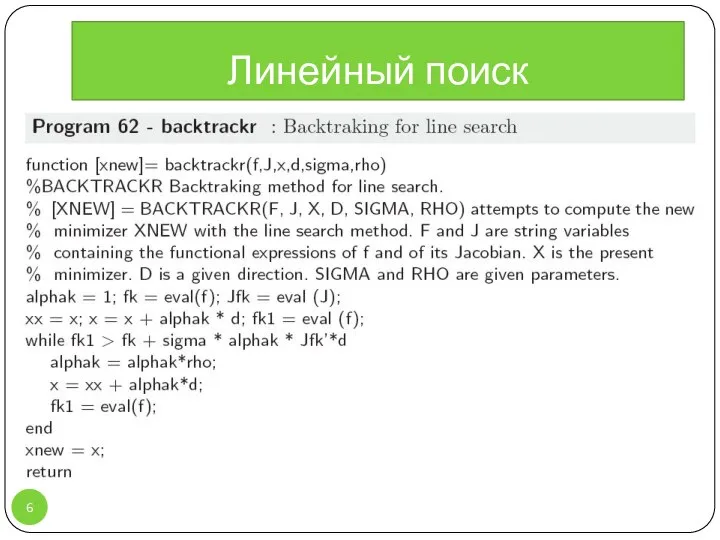
- 6. Линейный поиск
- 7. http://www.hbmeyer.de/backtrack/backtren.htm Поиск с возвратом (англ. Backtracking) — общий метод нахождения решений задачи, в которой требуется полный
- 8. Методы оптимизации Методы спуска минимизации квадратичных функций Для методов спуска особый интерес представляют такие функции, для
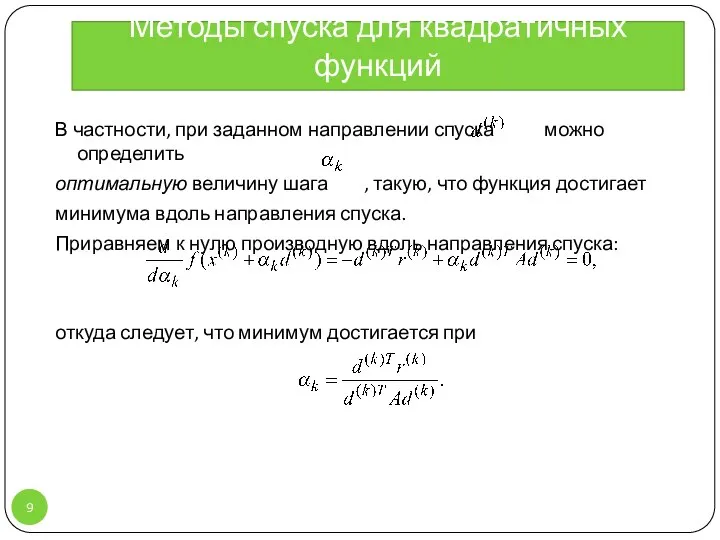
- 9. Методы спуска для квадратичных функций В частности, при заданном направлении спуска можно определить оптимальную величину шага
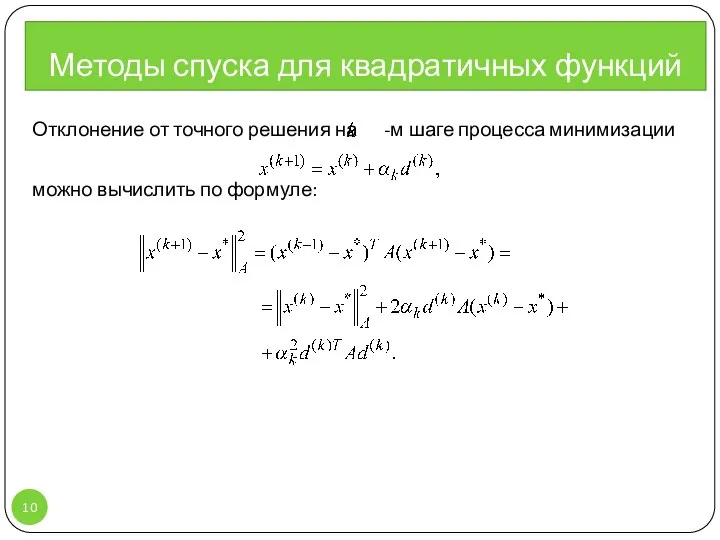
- 10. Методы спуска для квадратичных функций Отклонение от точного решения на -м шаге процесса минимизации можно вычислить
- 11. Методы спуска для квадратичных функций С другой стороны, поэтому из предыдущей формулы следует, что Обозначим ,
- 12. Метод наискорейшего спуска Поскольку матрица A симметрична и положительно определена, то всегда положительна. Более того, можно
- 13. Лемма. (Неравенство Канторовича) Пусть - симметричная положительно определенная матрица с наибольшим и наименьшим по модулю значениями
- 14. Соответствующие методы обладают следующим хорошим свойством: Свойство. Метод вычисления точки минимума квадратичной функции, основанный на вычислении
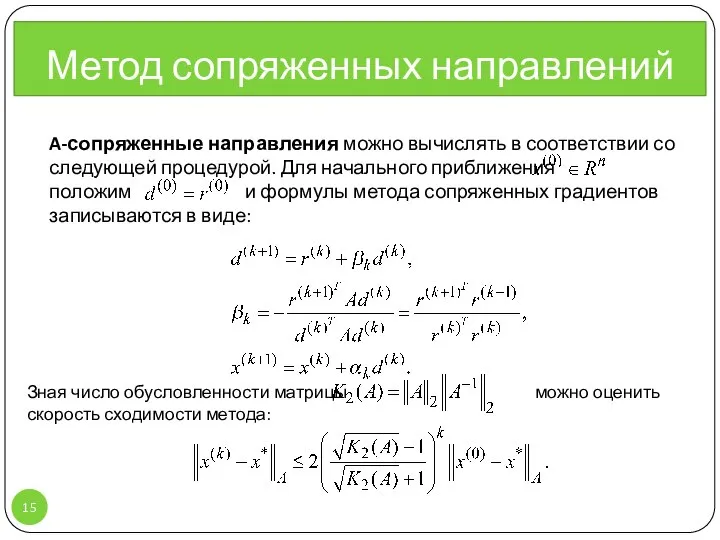
- 15. Метод сопряженных направлений A-сопряженные направления можно вычислять в соответствии со следующей процедурой. Для начального приближения положим
- 16. Скорость сходимости метода может быть повышена лишь за счет проведения предобуславливания матрицы с целью уменьшения числа
- 17. Метод сопряженных направлений Иллюстрация последовательных приближений метода наискорейшего спуска (зелёная ломаная) и метода сопряжённых градиентов (красная
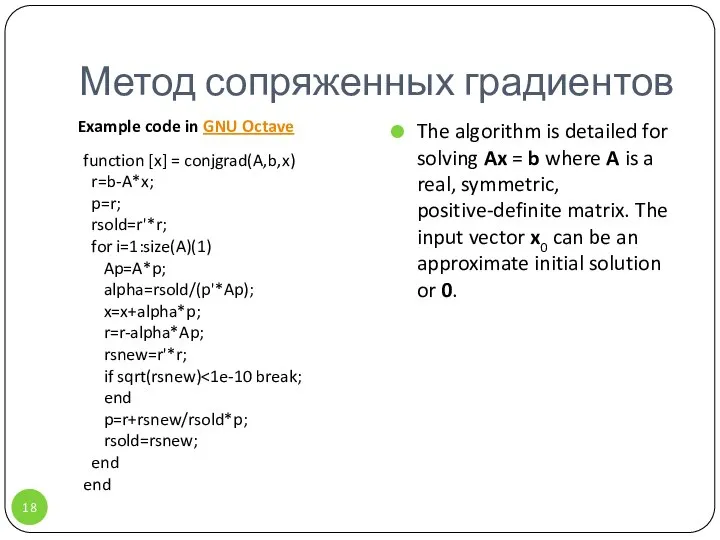
- 18. Метод сопряженных градиентов The algorithm is detailed for solving Ax = b where A is a
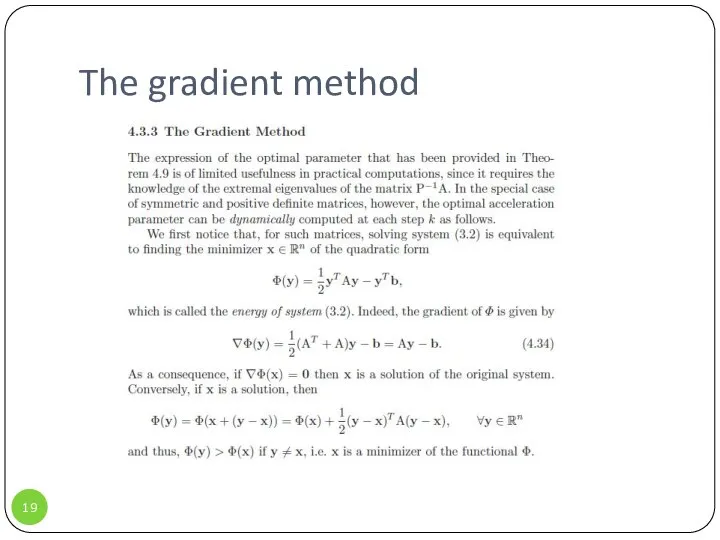
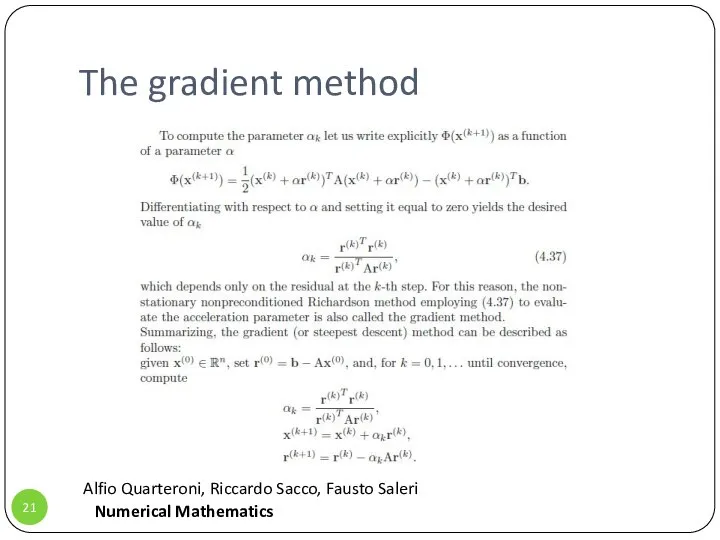
- 19. The gradient method
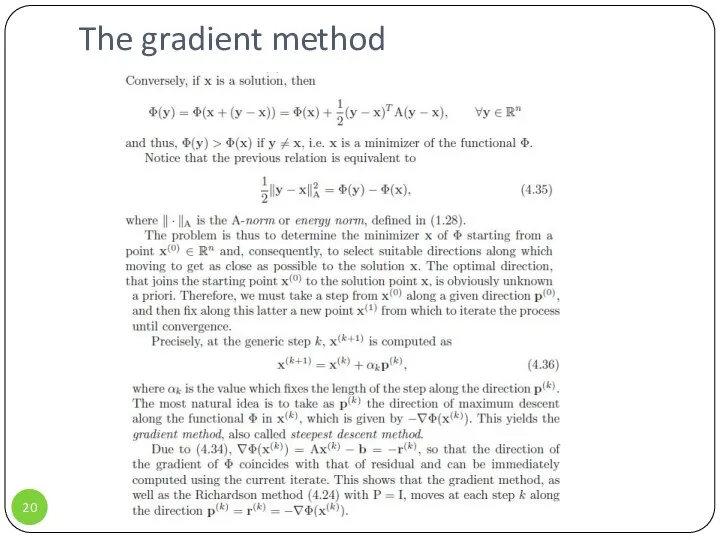
- 20. The gradient method
- 21. The gradient method Alfio Quarteroni, Riccardo Sacco, Fausto Saleri Numerical Mathematics
- 22. Функция Розенброка
- 24. Скачать презентацию
Линейный поиск
Методика линейного поиска
Рассмотрим итеративные методы, останавливающиеся при выполнении некоторого критерия
Линейный поиск
Методика линейного поиска
Рассмотрим итеративные методы, останавливающиеся при выполнении некоторого критерия
Однако простейшая процедура, заключающаяся в выборе достаточно
большого начального значения ,
Однако простейшая процедура, заключающаяся в выборе достаточно
большого начального значения ,
Это требование обеспечивает некую усредненную скорость спуска на очередной итерации не
Это требование обеспечивает некую усредненную скорость спуска на очередной итерации не
Свойство. Предположим, что для всех . Тогда существует интервал такой, что
Свойство. Предположим, что для всех . Тогда существует интервал такой, что
Линейный поиск
Линейный поиск
http://www.hbmeyer.de/backtrack/backtren.htm
Поиск с возвратом (англ. Backtracking) — общий метод нахождения решений задачи, в которой
http://www.hbmeyer.de/backtrack/backtren.htm
Поиск с возвратом (англ. Backtracking) — общий метод нахождения решений задачи, в которой

Методы оптимизации
Методы спуска минимизации квадратичных функций
Для методов спуска особый интерес представляют
Методы оптимизации
Методы спуска минимизации квадратичных функций
Для методов спуска особый интерес представляют
Методы спуска для квадратичных функций
В частности, при заданном направлении спуска можно
Методы спуска для квадратичных функций
В частности, при заданном направлении спуска можно
Методы спуска для квадратичных функций
Отклонение от точного решения на -м шаге
Методы спуска для квадратичных функций
Отклонение от точного решения на -м шаге
Методы спуска для квадратичных функций
С другой стороны,
поэтому из предыдущей формулы следует,
Методы спуска для квадратичных функций
С другой стороны,
поэтому из предыдущей формулы следует,
Метод наискорейшего спуска
Поскольку матрица A симметрична и положительно определена, то
всегда положительна.
Метод наискорейшего спуска
Поскольку матрица A симметрична и положительно определена, то
всегда положительна.
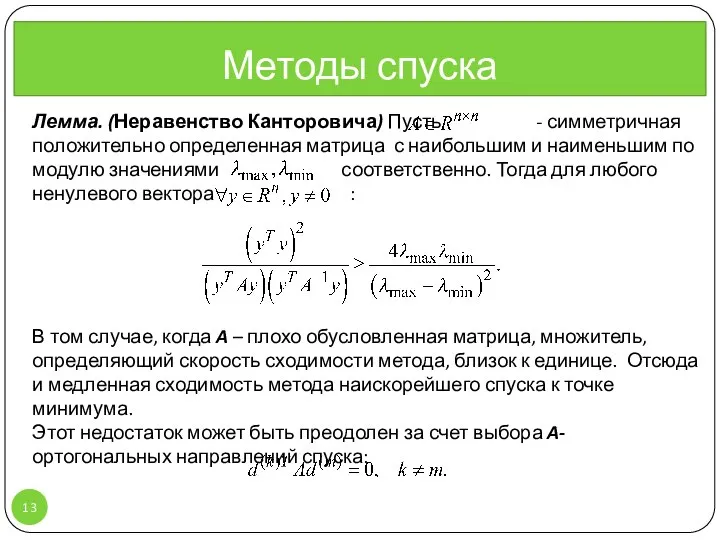
Лемма. (Неравенство Канторовича) Пусть - симметричная положительно определенная матрица с наибольшим
Лемма. (Неравенство Канторовича) Пусть - симметричная положительно определенная матрица с наибольшим
Соответствующие методы обладают следующим хорошим свойством:
Свойство. Метод вычисления точки минимума квадратичной
Соответствующие методы обладают следующим хорошим свойством:
Свойство. Метод вычисления точки минимума квадратичной
Метод сопряженных направлений
A-сопряженные направления можно вычислять в соответствии со следующей процедурой.
Метод сопряженных направлений
A-сопряженные направления можно вычислять в соответствии со следующей процедурой.

Скорость сходимости метода может быть повышена лишь за счет проведения
предобуславливания
Скорость сходимости метода может быть повышена лишь за счет проведения
предобуславливания

Метод сопряженных направлений
Иллюстрация последовательных приближений метода наискорейшего спуска (зелёная ломаная) и
Метод сопряженных направлений
Иллюстрация последовательных приближений метода наискорейшего спуска (зелёная ломаная) и
Метод сопряженных градиентов
The algorithm is detailed for solving Ax = b
Метод сопряженных градиентов
The algorithm is detailed for solving Ax = b
The gradient method
The gradient method
The gradient method
The gradient method
The gradient method
Alfio Quarteroni, Riccardo Sacco, Fausto Saleri
Numerical Mathematics
The gradient method
Alfio Quarteroni, Riccardo Sacco, Fausto Saleri
Numerical Mathematics
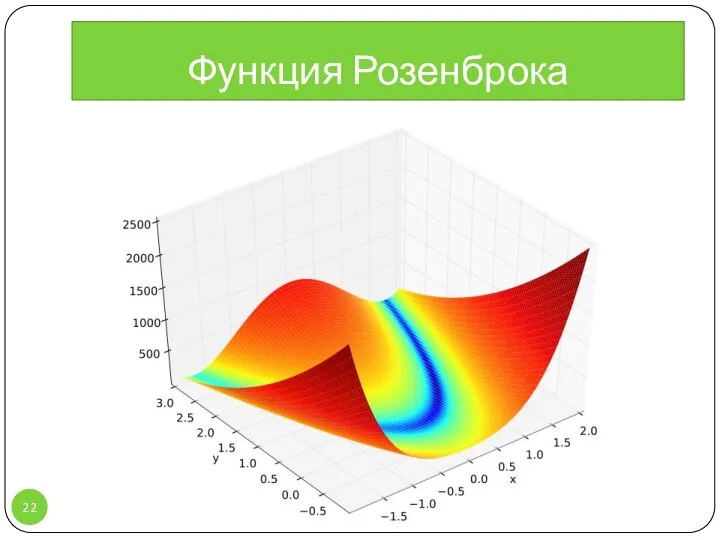
Функция Розенброка
Функция Розенброка
 Виды соединений составных частей изделия
Виды соединений составных частей изделия Визитная карточка Сеула, Южная Корея
Визитная карточка Сеула, Южная Корея Контроль качества при производстве тыквенных цукат
Контроль качества при производстве тыквенных цукат Политические пиар - технологии
Политические пиар - технологии Продажа коммерческих помещений в ЖК «Палацио»
Продажа коммерческих помещений в ЖК «Палацио» ФИНАНСОВЫЙ КРИЗИС: причины возникновения и пути выхода Берзон Н.И. Д.э.н., профессор,
ФИНАНСОВЫЙ КРИЗИС: причины возникновения и пути выхода Берзон Н.И. Д.э.н., профессор,  Презентация на тему "Видеообучение - одна из форм дистанционного обучения" - скачать презентации по Педагогике
Презентация на тему "Видеообучение - одна из форм дистанционного обучения" - скачать презентации по Педагогике Цель и основные задачи инженерного обеспечения современного общевойскового боя. Общая тактика
Цель и основные задачи инженерного обеспечения современного общевойскового боя. Общая тактика Расщепитель фаз НБ-455
Расщепитель фаз НБ-455 Cosmology
Cosmology Презентация на тему "Работа с родителями как одно из направлений деятельности классного руководителя" - скачать презентации
Презентация на тему "Работа с родителями как одно из направлений деятельности классного руководителя" - скачать презентации  Презентация КЛАССИКИ ПОЛИТИЧЕСКОЙ ЭКОНОМИИ ОБ УПРАВЛЕНИИ (XVIII-XIXBB.)
Презентация КЛАССИКИ ПОЛИТИЧЕСКОЙ ЭКОНОМИИ ОБ УПРАВЛЕНИИ (XVIII-XIXBB.) Система каротажа при бурении. Занятие 9
Система каротажа при бурении. Занятие 9 Презентация 1 Big Data
Презентация 1 Big Data Моторное масло
Моторное масло Системы связи. Телекоммуникационные сети
Системы связи. Телекоммуникационные сети Значение фамилий. Этимология
Значение фамилий. Этимология Урок чтения 4 класс
Урок чтения 4 класс Возникновение и развитие египтологии
Возникновение и развитие египтологии  Разработка информационно-измерительной системы контроля и учёта энергоресурсов на базе сумматора «СЭМ-2.01» завода
Разработка информационно-измерительной системы контроля и учёта энергоресурсов на базе сумматора «СЭМ-2.01» завода доступная среда, универсальный дизайн
доступная среда, универсальный дизайн  Ферменты
Ферменты Открытые спортивно-массовые соревнования «Дог-квест «Хвостатая тропа». Соревнования по спортивному ориентированию на велосипеда
Открытые спортивно-массовые соревнования «Дог-квест «Хвостатая тропа». Соревнования по спортивному ориентированию на велосипеда Специальное снаряжение
Специальное снаряжение Программирование циклических алгоритмов. Начала программирования
Программирование циклических алгоритмов. Начала программирования Биография Дарвина
Биография Дарвина Энзимопатии
Энзимопатии  франц
франц