- Построение плана ускорений кривошипно-ползунных механизмов. (Лекция 4)

Содержание
- 2. Векторное уравнение для построения плана ускорений Построение плана ускорений позволяет определить линейные ускорения точек А, В
- 3. Построение плана ускорений Построение плана ускорений начинаем с выбора масштабного коэффициента плана ускорений по любой известной
- 4. Графоаналитический метод кинематического анализа механизма с гидроцилиндром План положений План положений механизма для заданного значения обобщенной
- 5. План механизма с гидроцилиндром План скоростей позволит определить угловые скорости звеньев 1-2 и 3, линейные скорости
- 6. Линейные скорости центров тяжести звеньев Линейная скорость центра тяжести цилиндра (звено 1) как точки, лежащей на
- 7. Векторное уравнение для построения плана ускорения механизма с гидроцилиндром. План ускорений механизма с гидроцилиндром позволяет определить
- 8. План ускорений механизма с гидроцилиндром
- 9. Графическое решение уравнения плана ускорений Графическое решение уравнения состоит в определении неизвестных касательных составляющих линейных ускорений
- 11. Скачать презентацию
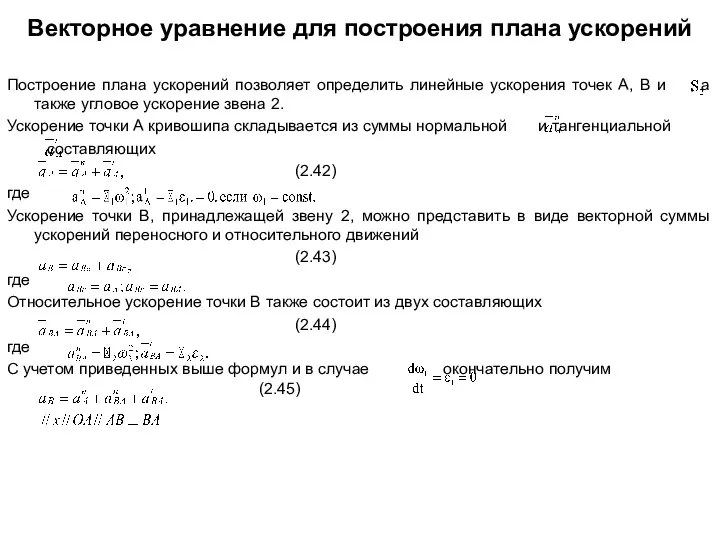
Векторное уравнение для построения плана ускорений
Построение плана ускорений позволяет определить линейные
Векторное уравнение для построения плана ускорений
Построение плана ускорений позволяет определить линейные
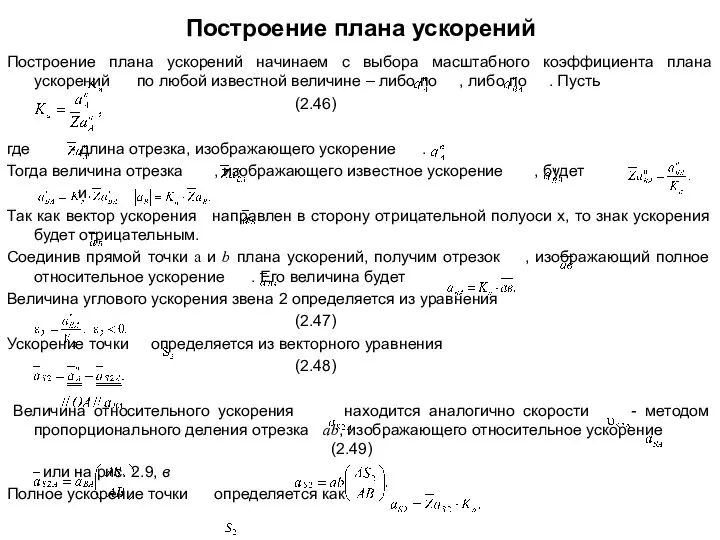
Построение плана ускорений
Построение плана ускорений начинаем с выбора масштабного коэффициента плана
Построение плана ускорений
Построение плана ускорений начинаем с выбора масштабного коэффициента плана
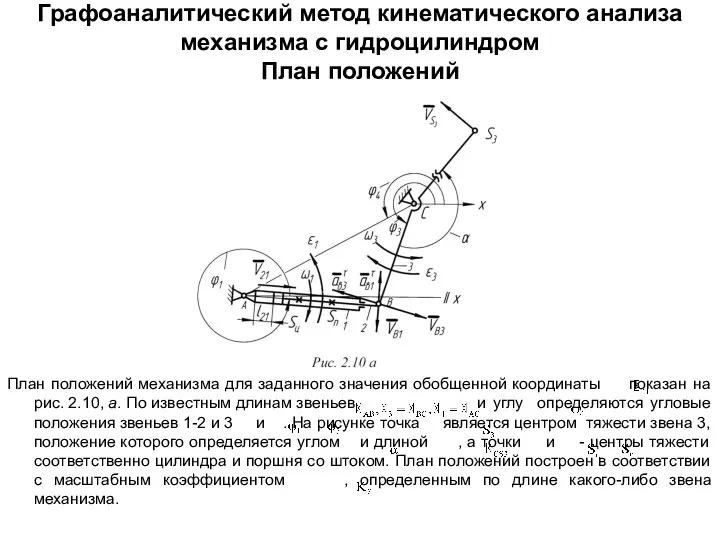
Графоаналитический метод кинематического анализа механизма с гидроцилиндром
План положений
План положений механизма для
Графоаналитический метод кинематического анализа механизма с гидроцилиндром
План положений
План положений механизма для
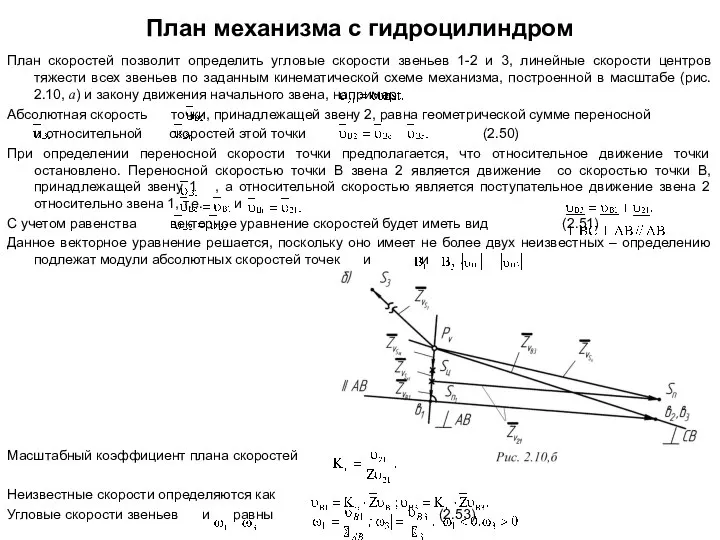
План механизма с гидроцилиндром
План скоростей позволит определить угловые скорости звеньев 1-2
План механизма с гидроцилиндром
План скоростей позволит определить угловые скорости звеньев 1-2
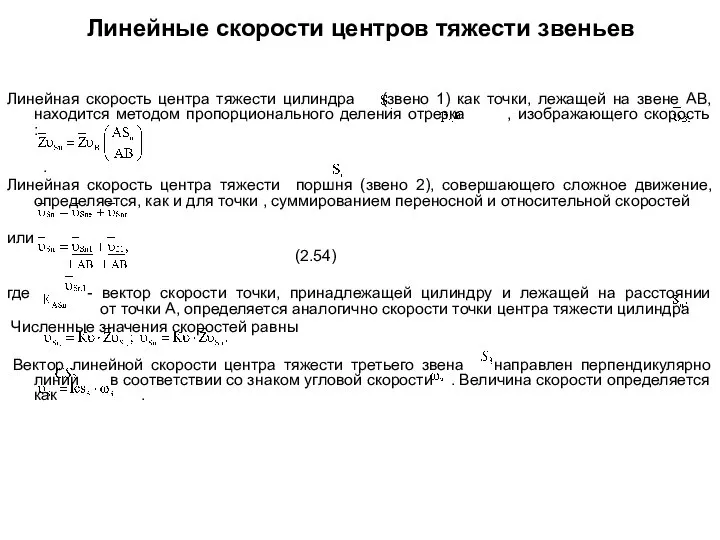
Линейные скорости центров тяжести звеньев
Линейная скорость центра тяжести цилиндра (звено 1)
Линейные скорости центров тяжести звеньев
Линейная скорость центра тяжести цилиндра (звено 1)
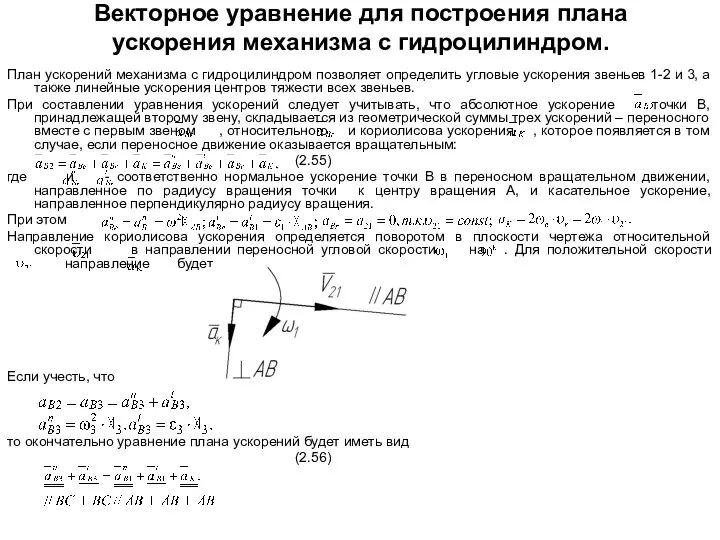
Векторное уравнение для построения плана ускорения механизма с гидроцилиндром.
План ускорений механизма
Векторное уравнение для построения плана ускорения механизма с гидроцилиндром.
План ускорений механизма

План ускорений механизма с гидроцилиндром
План ускорений механизма с гидроцилиндром
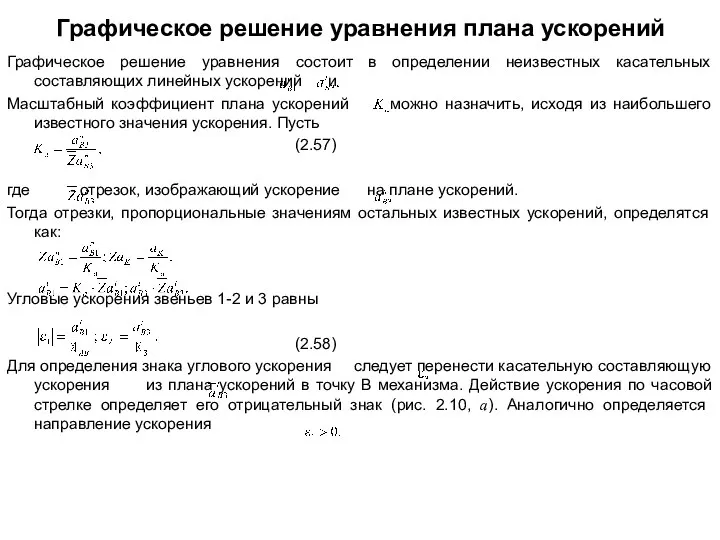
Графическое решение уравнения плана ускорений
Графическое решение уравнения состоит в определении неизвестных
Графическое решение уравнения плана ускорений
Графическое решение уравнения состоит в определении неизвестных
 The training of musical art specialists for socio-cultural activity
The training of musical art specialists for socio-cultural activity Древние соборы
Древние соборы ПРЕЗЕНТАЦИЯ ПО МАТЕМАТИКЕ 2 КЛАСС Фиалковская Н.В.
ПРЕЗЕНТАЦИЯ ПО МАТЕМАТИКЕ 2 КЛАСС Фиалковская Н.В.  ВКР «Влияние занятий гимнастикой пилатес на развитие физических качеств, гибкости и силы у подростков 12-14 лет»
ВКР «Влияние занятий гимнастикой пилатес на развитие физических качеств, гибкости и силы у подростков 12-14 лет» Системы телевидения с новым качеством изображения и звукового сопровождения
Системы телевидения с новым качеством изображения и звукового сопровождения Тема 7. Проектирование организации
Тема 7. Проектирование организации  Cредовые ресурсы логопедической работы
Cредовые ресурсы логопедической работы А ну-ка, мальчики! - презентация для начальной школы_
А ну-ка, мальчики! - презентация для начальной школы_ Что нам стоит сайт построить?
Что нам стоит сайт построить? Страстная седьмица особенности богослужения
Страстная седьмица особенности богослужения Выбор варианта застройки территории с использованием концепции наиболее эффективного использования
Выбор варианта застройки территории с использованием концепции наиболее эффективного использования Світильник. Принципова схема
Світильник. Принципова схема США - страна деловых людей
США - страна деловых людей Обычаи, обряды и традиции русского народа
Обычаи, обряды и традиции русского народа Автоматический контроль качества
Автоматический контроль качества Философия средневекового ВОСТОКА Жеребен Евгений Жидовленков Александр Группа Т-1207
Философия средневекового ВОСТОКА Жеребен Евгений Жидовленков Александр Группа Т-1207 Босқындардың мәртебесінің халықаралық-құқықтық реттелуі
Босқындардың мәртебесінің халықаралық-құқықтық реттелуі Перевод слов 日本 (Япония)
Перевод слов 日本 (Япония)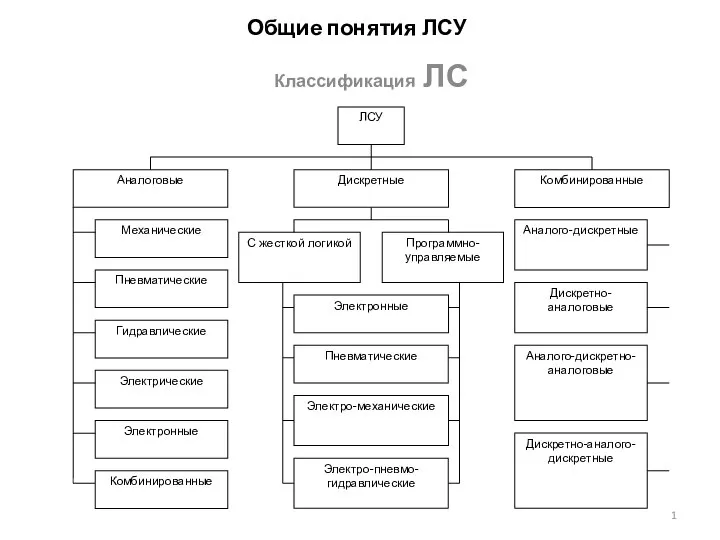 Общие понятия ЛСУ
Общие понятия ЛСУ  Теоретические методы исследования строительных конструкций, зданий и сооружений
Теоретические методы исследования строительных конструкций, зданий и сооружений Государственное бюджетное профессионально образовательное учреждение «МЕДИЦИНСКИЙ КОЛЛЕДЖ МИНИСТЕРСТВА ЗДРАВООХРАНЕНИЯИ ДЕМО
Государственное бюджетное профессионально образовательное учреждение «МЕДИЦИНСКИЙ КОЛЛЕДЖ МИНИСТЕРСТВА ЗДРАВООХРАНЕНИЯИ ДЕМО ЧМТ: патогенез, клиника, диагностика, ИТ http://prezentacija.biz/
ЧМТ: патогенез, клиника, диагностика, ИТ http://prezentacija.biz/  Введение в религиоведение
Введение в религиоведение Автобусные кондиционеры
Автобусные кондиционеры Особенности работы первичных и промежуточных преобразователей и вторичных приборов для автоматизированных измерении регуляторо
Особенности работы первичных и промежуточных преобразователей и вторичных приборов для автоматизированных измерении регуляторо Технология выполнения женской, короткой, креативной стрижки с учетом азиатских тенденций в коллекции «Театр»
Технология выполнения женской, короткой, креативной стрижки с учетом азиатских тенденций в коллекции «Театр»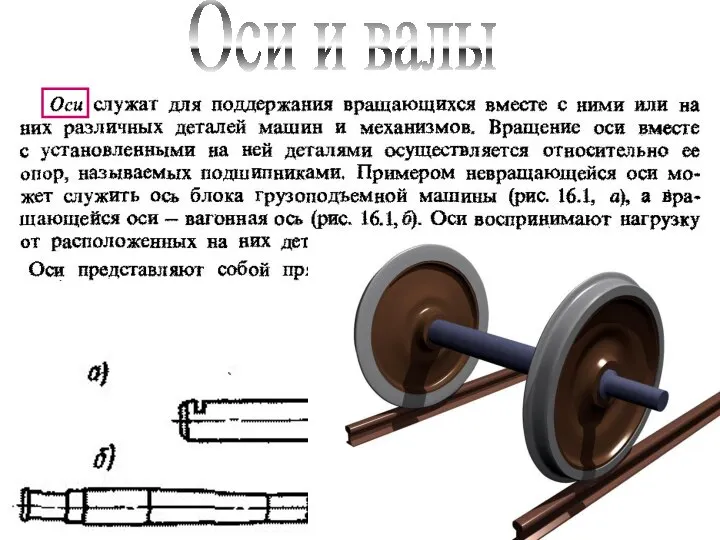 Оси и валы
Оси и валы Основы физики атома
Основы физики атома