- Принцип действия атомно-силового микроскопа (АСМ). Схема реализации обратной связи в АСМ

Содержание
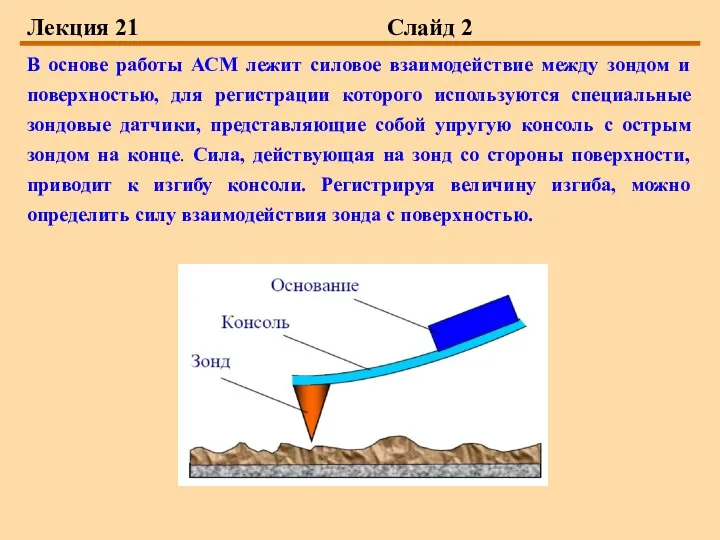
- 2. Лекция 21 Слайд 2 В основе работы АСМ лежит силовое взаимодействие между зондом и поверхностью, для
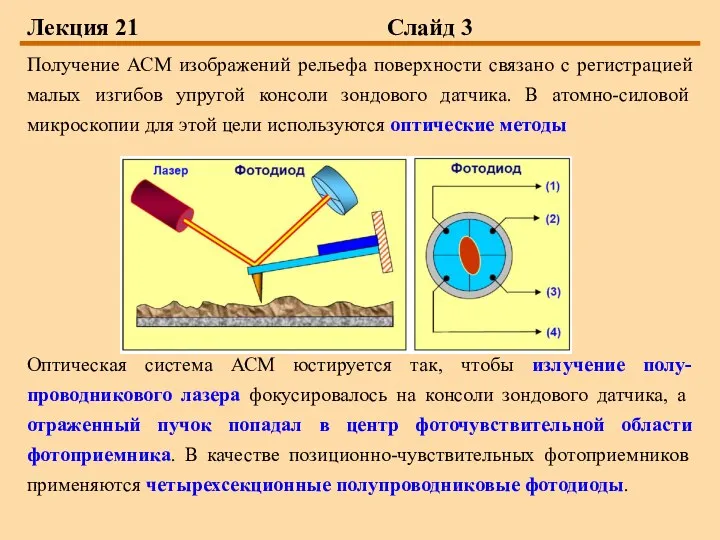
- 3. Лекция 21 Слайд 3 Получение АСМ изображений рельефа поверхности связано с регистрацией малых изгибов упругой консоли
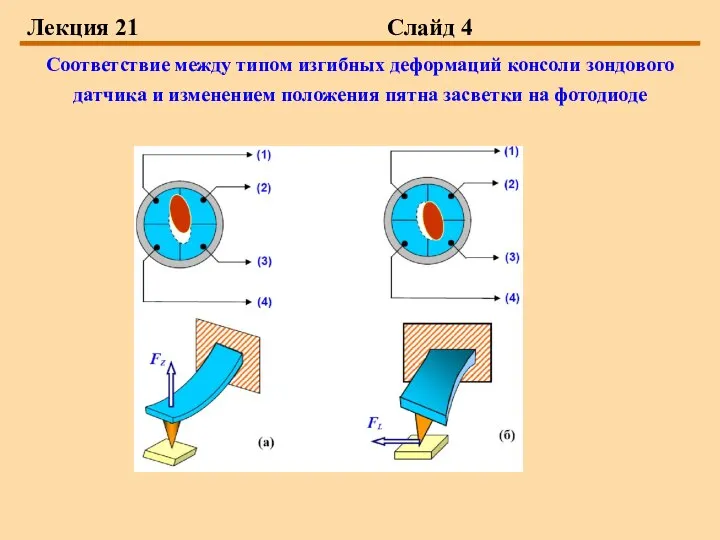
- 4. Лекция 21 Слайд 4 Соответствие между типом изгибных деформаций консоли зондового датчика и изменением положения пятна
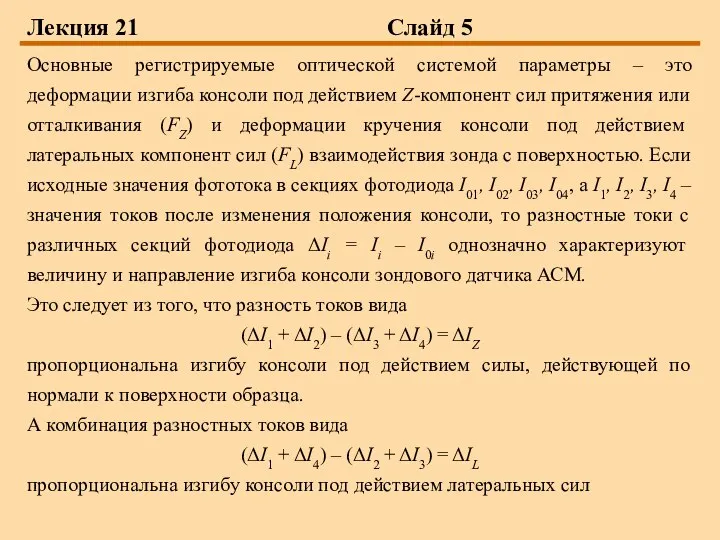
- 5. Лекция 21 Слайд 5 Основные регистрируемые оптической системой параметры – это деформации изгиба консоли под действием
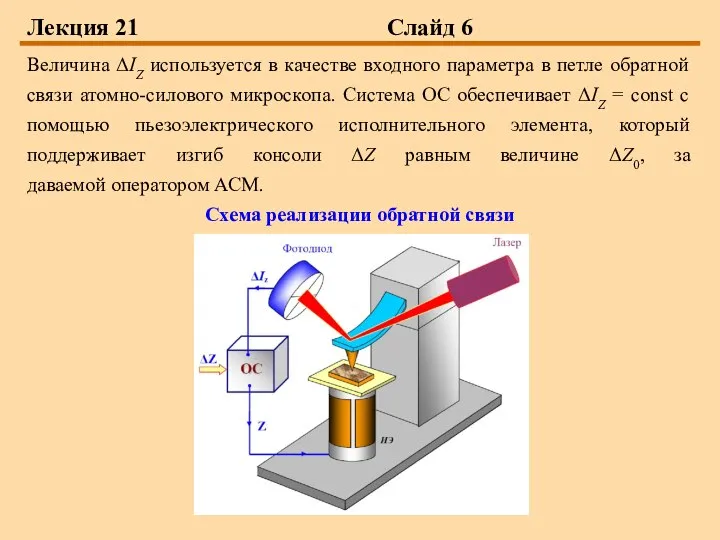
- 6. Лекция 21 Слайд 6 Величина ΔIZ используется в качестве входного параметра в петле обратной связи атомно-силового
- 7. Лекция 21 Слайд 7 При сканировании образца в режиме ΔZ = const зонд перемещается вдоль поверхности,
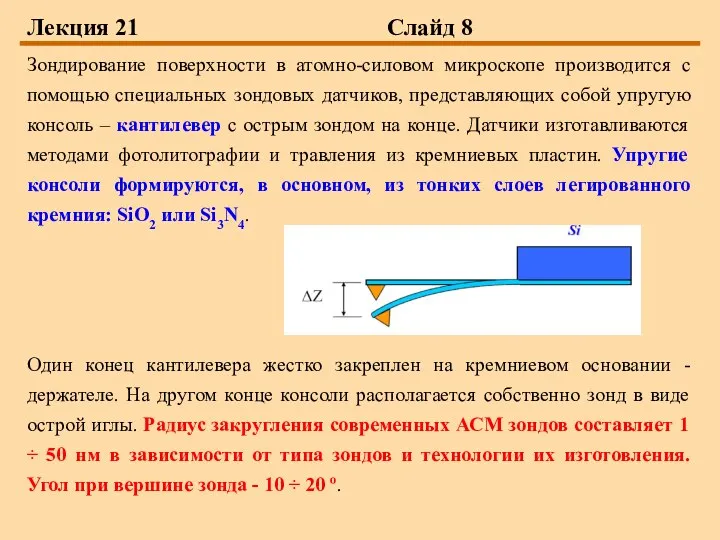
- 8. Лекция 21 Слайд 8 Зондирование поверхности в атомно-силовом микроскопе производится с помощью специальных зондовых датчиков, представляющих
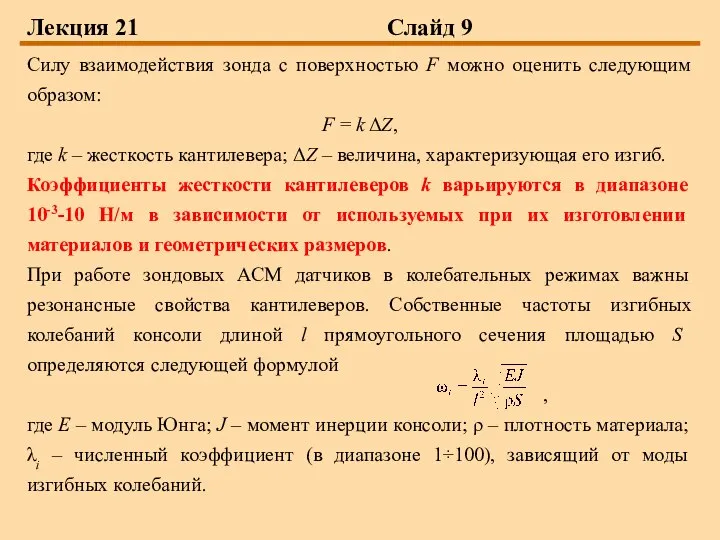
- 9. Лекция 21 Слайд 9 Силу взаимодействия зонда с поверхностью F можно оценить следующим образом: F =
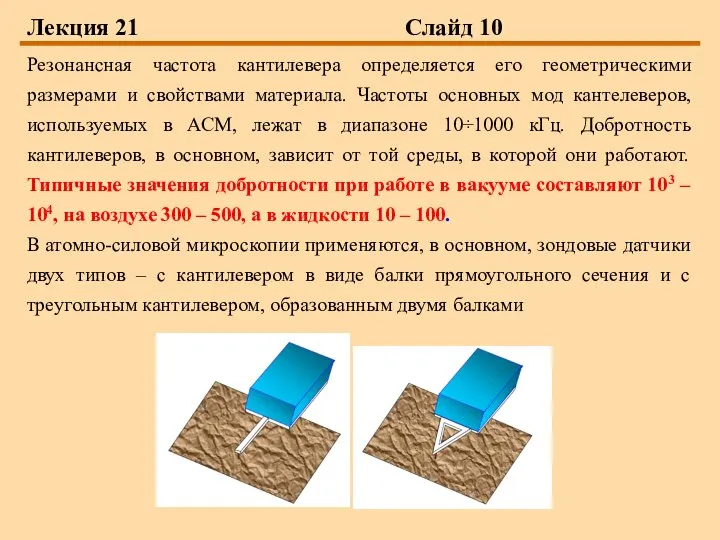
- 10. Лекция 21 Слайд 10 Резонансная частота кантилевера определяется его геометрическими размерами и свойствами материала. Частоты основных
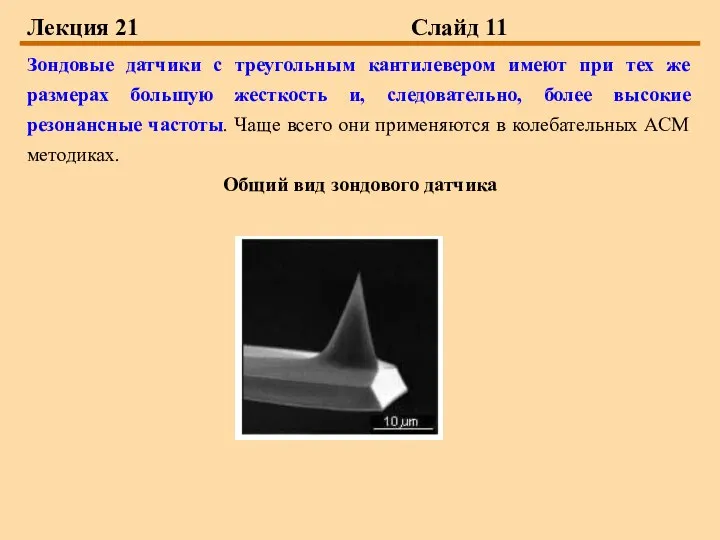
- 11. Лекция 21 Слайд 11 Зондовые датчики с треугольным кантилевером имеют при тех же размерах большую жесткость
- 12. Лекция 21 Слайд 12 Методы получения информации о рельефе и свойствах поверхности с помощью АСМ– контактные
- 13. Лекция 21 Слайд 13 При сканировании образца в режиме Fz = const система обратной связи поддерживает
- 14. Лекция 21 Слайд 14 Недостатком контактных АСМ методик является непосредственное механическое взаимодействие зонда с поверхностью. Это
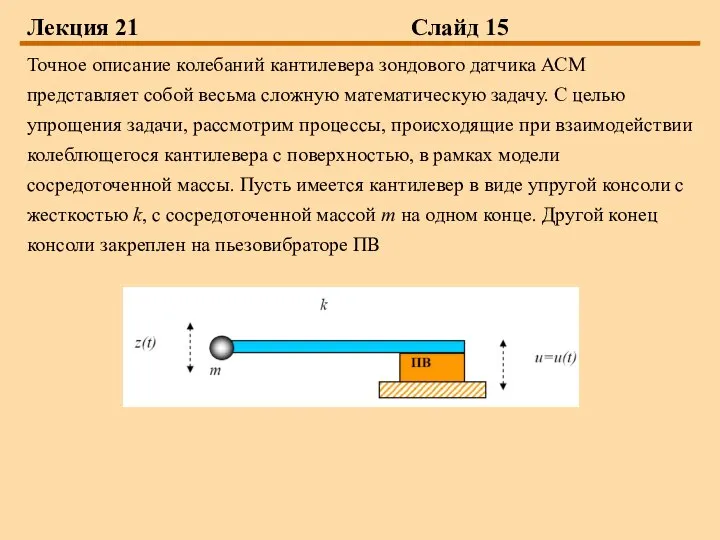
- 15. Лекция 21 Слайд 15 Точное описание колебаний кантилевера зондового датчика АСМ представляет собой весьма сложную математическую
- 16. Лекция 21 Слайд 16 Если пьезовибратор совершает гармонические колебания u = u0cosωt с частотой ω, тогда
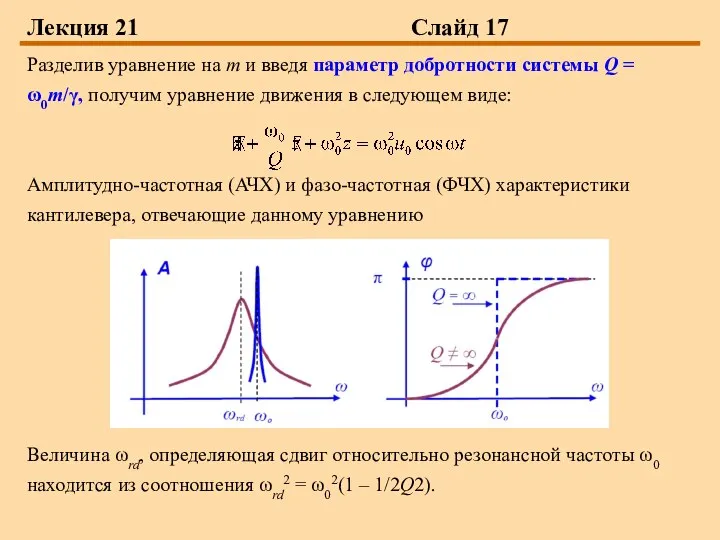
- 17. Лекция 21 Слайд 17 Разделив уравнение на m и введя параметр добротности системы Q = ω0m/γ,
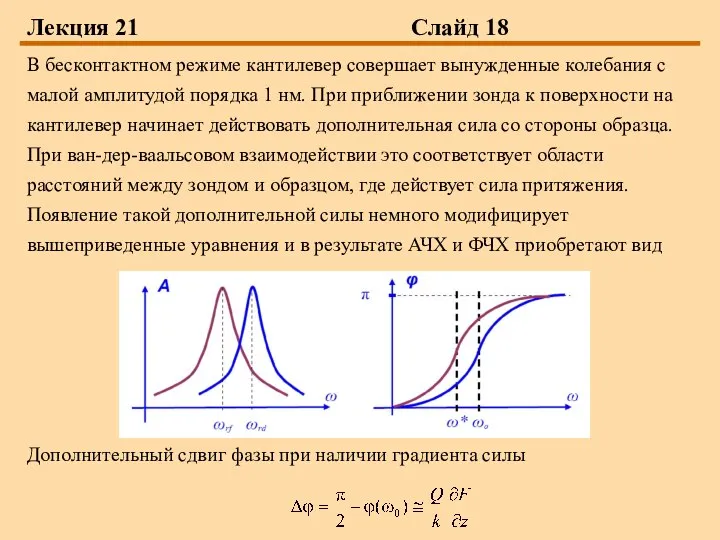
- 18. Лекция 21 Слайд 18 В бесконтактном режиме кантилевер совершает вынужденные колебания с малой амплитудой порядка 1
- 19. Лекция 21 Слайд 19 Регистрация изменения амплитуды и фазы колебаний кантилевера в бесконтактном режиме требует высокой
- 21. Скачать презентацию
Лекция 21 Слайд 2
В основе работы АСМ лежит силовое взаимодействие между зондом
Лекция 21 Слайд 2
В основе работы АСМ лежит силовое взаимодействие между зондом
Лекция 21 Слайд 3
Получение АСМ изображений рельефа поверхности связано с регистрацией малых
Лекция 21 Слайд 3
Получение АСМ изображений рельефа поверхности связано с регистрацией малых
Лекция 21 Слайд 4
Соответствие между типом изгибных деформаций консоли зондового датчика и
Лекция 21 Слайд 4
Соответствие между типом изгибных деформаций консоли зондового датчика и
Лекция 21 Слайд 5
Основные регистрируемые оптической системой параметры – это деформации изгиба
Лекция 21 Слайд 5
Основные регистрируемые оптической системой параметры – это деформации изгиба
Лекция 21 Слайд 6
Величина ΔIZ используется в качестве входного параметра в петле
Лекция 21 Слайд 6
Величина ΔIZ используется в качестве входного параметра в петле
Лекция 21 Слайд 7
При сканировании образца в режиме ΔZ = const зонд
Лекция 21 Слайд 7
При сканировании образца в режиме ΔZ = const зонд
Лекция 21 Слайд 8
Зондирование поверхности в атомно-силовом микроскопе производится с помощью специальных
Лекция 21 Слайд 8
Зондирование поверхности в атомно-силовом микроскопе производится с помощью специальных
Лекция 21 Слайд 9
Силу взаимодействия зонда с поверхностью F можно оценить следующим
Лекция 21 Слайд 9
Силу взаимодействия зонда с поверхностью F можно оценить следующим
Лекция 21 Слайд 10
Резонансная частота кантилевера определяется его геометрическими размерами и
Лекция 21 Слайд 10
Резонансная частота кантилевера определяется его геометрическими размерами и
Лекция 21 Слайд 11
Зондовые датчики с треугольным кантилевером имеют при тех
Лекция 21 Слайд 11
Зондовые датчики с треугольным кантилевером имеют при тех
Лекция 21 Слайд 12
Методы получения информации о рельефе и свойствах поверхности
Лекция 21 Слайд 12
Методы получения информации о рельефе и свойствах поверхности
Лекция 21 Слайд 13
При сканировании образца в режиме Fz = const
Лекция 21 Слайд 13
При сканировании образца в режиме Fz = const
Лекция 21 Слайд 14
Недостатком контактных АСМ методик является непосредственное механическое взаимодействие
Лекция 21 Слайд 14
Недостатком контактных АСМ методик является непосредственное механическое взаимодействие
Лекция 21 Слайд 15
Точное описание колебаний кантилевера зондового датчика АСМ представляет
Лекция 21 Слайд 15
Точное описание колебаний кантилевера зондового датчика АСМ представляет
Лекция 21 Слайд 16
Если пьезовибратор совершает гармонические колебания u = u0cosωt
Лекция 21 Слайд 16
Если пьезовибратор совершает гармонические колебания u = u0cosωt
Лекция 21 Слайд 17
Разделив уравнение на m и введя параметр добротности
Лекция 21 Слайд 17
Разделив уравнение на m и введя параметр добротности
Лекция 21 Слайд 18
В бесконтактном режиме кантилевер совершает вынужденные колебания с
Лекция 21 Слайд 18
В бесконтактном режиме кантилевер совершает вынужденные колебания с
Лекция 21 Слайд 19
Регистрация изменения амплитуды и фазы колебаний кантилевера в
Лекция 21 Слайд 19
Регистрация изменения амплитуды и фазы колебаний кантилевера в
 Презентация к лекции 1. Общее понятие контроля
Презентация к лекции 1. Общее понятие контроля Asel and Marzhan
Asel and Marzhan Презентация Разминка по теме: Таможенное право
Презентация Разминка по теме: Таможенное право Ферару Галина Сергеевна Тема диссертации МЕТОДОЛОГИЯ УСТОЙЧИВОГО РАЗВИТИЯ ПРЕДПРИЯТИЙ ЛЕСОПРОМЫШЛЕННОГО КОМПЛЕКСА КАК ЭКОЛ
Ферару Галина Сергеевна Тема диссертации МЕТОДОЛОГИЯ УСТОЙЧИВОГО РАЗВИТИЯ ПРЕДПРИЯТИЙ ЛЕСОПРОМЫШЛЕННОГО КОМПЛЕКСА КАК ЭКОЛ НОВОЕ КРИМИНАЛИСТИЧЕСКОЕ ОБОРУДОВАНИЕ И ПРИНАДЛЕЖНОСТИ, ПОСТУПАЮЩИЕ НА ВООРУЖЕНИЕ В ЭКП ОВД
НОВОЕ КРИМИНАЛИСТИЧЕСКОЕ ОБОРУДОВАНИЕ И ПРИНАДЛЕЖНОСТИ, ПОСТУПАЮЩИЕ НА ВООРУЖЕНИЕ В ЭКП ОВД Организация и содержание физминутки на уроке
Организация и содержание физминутки на уроке Презентация "Иллюзии восприятия глубины" - скачать презентации по МХК
Презентация "Иллюзии восприятия глубины" - скачать презентации по МХК Культура. Функции культуры
Культура. Функции культуры Организация исполнения федерального бюджета
Организация исполнения федерального бюджета Библейские сказания
Библейские сказания Пути вступления аминокислот в ЦТК
Пути вступления аминокислот в ЦТК  Гжель - один из традиционных российских центров производства керамики
Гжель - один из традиционных российских центров производства керамики Все работы хороши, выбирай на вкус….
Все работы хороши, выбирай на вкус…. МАГНИТОФОН ПРИХОДИТ НА ПОМОЩЬ
МАГНИТОФОН ПРИХОДИТ НА ПОМОЩЬ Токсикодермия Выполнила студентка ПМГМУ им. И.М.Сеченова 4 курса 44 группы Афанасьева Анастасия
Токсикодермия Выполнила студентка ПМГМУ им. И.М.Сеченова 4 курса 44 группы Афанасьева Анастасия  Презентация "Уроки изобразительного искусства" - скачать презентации по МХК
Презентация "Уроки изобразительного искусства" - скачать презентации по МХК Технологии доступа к данным в среде Visual Studio 2010 (Лекция 18)
Технологии доступа к данным в среде Visual Studio 2010 (Лекция 18) Дополненная реальность в образовательных программах
Дополненная реальность в образовательных программах Разбор задач ЕГЭ. Анализ программ с циклами и подпрограммами. В13
Разбор задач ЕГЭ. Анализ программ с циклами и подпрограммами. В13 Goths (the subculture)
Goths (the subculture) Обучение двигательным действиям
Обучение двигательным действиям Blogoda.ru, info@blogoda.ru (495) 972-44-27 Проект «Блогода» Коммуникационный сервис для блоггеров. - презентация
Blogoda.ru, info@blogoda.ru (495) 972-44-27 Проект «Блогода» Коммуникационный сервис для блоггеров. - презентация Презентация Рынок капитала
Презентация Рынок капитала  Programming paradigms
Programming paradigms Аэрофлот.Российские авиалинии
Аэрофлот.Российские авиалинии Валы и подшипники. Подшипники качения (ПК)
Валы и подшипники. Подшипники качения (ПК) Контроль и управление качеством строительного процесса
Контроль и управление качеством строительного процесса Постійне магнітне поле в речовині
Постійне магнітне поле в речовині