Принцип работы сканирующего туннельного микроскопа (СТМ). Получение изображения поверхности в режиме постоянного туннельного то
- Принцип работы сканирующего туннельного микроскопа (СТМ). Получение изображения поверхности в режиме постоянного туннельного то

Содержание
- 2. Лекция 20 Слайд 2 Исторически первым в семействе зондовых микроскопов появился сканирующий туннельный микроскоп (СТМ). Он
- 3. Лекция 20 Слайд 3 Принцип работы СТМ основан на явлении туннелирования электронов через узкий потенциальный барьер
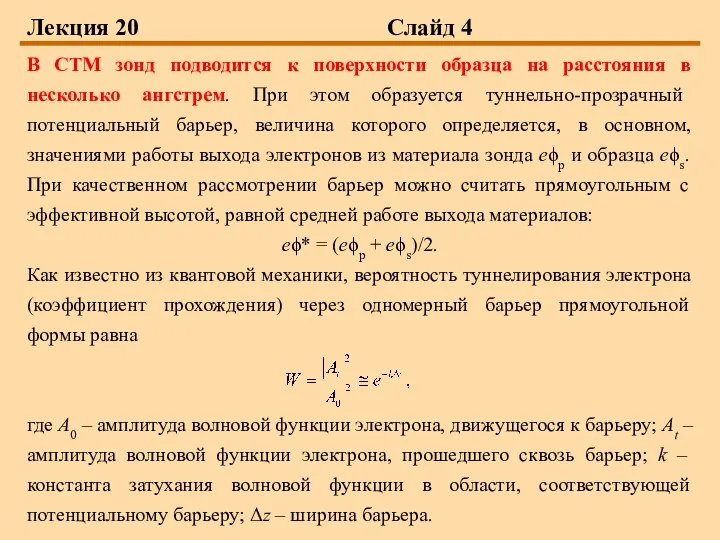
- 4. Лекция 20 Слайд 4 В СТМ зонд подводится к поверхности образца на расстояния в несколько ангстрем.
- 5. Лекция 20 Слайд 5 Энергетическая диаграмма туннельного контакта двух металлов Для туннельного контакта двух металлов константа
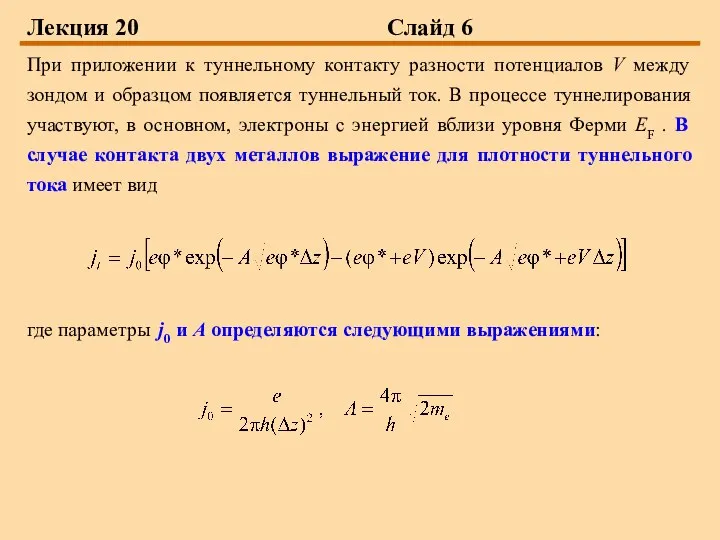
- 6. Лекция 20 Слайд 6 При приложении к туннельному контакту разности потенциалов V между зондом и образцом
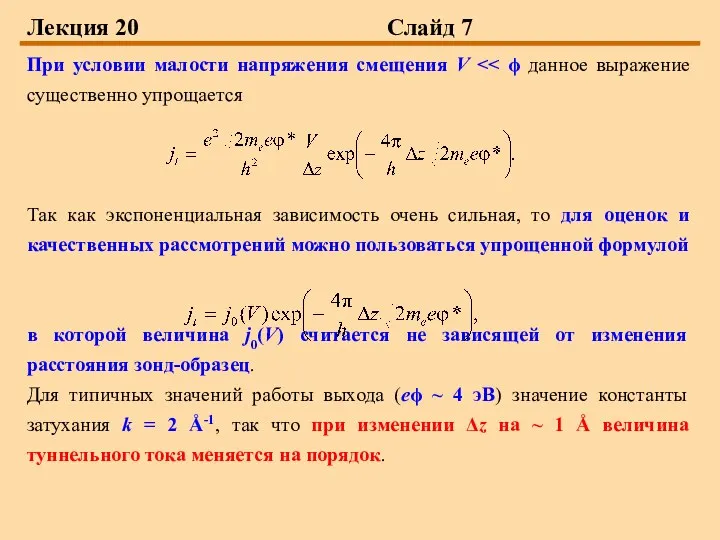
- 7. Лекция 20 Слайд 7 При условии малости напряжения смещения V Так как экспоненциальная зависимость очень сильная,
- 8. Лекция 20 Слайд 8 Экспоненциальная зависимость туннельного тока от расстояния позволяет осуществлять регулирование расстояния между зондом
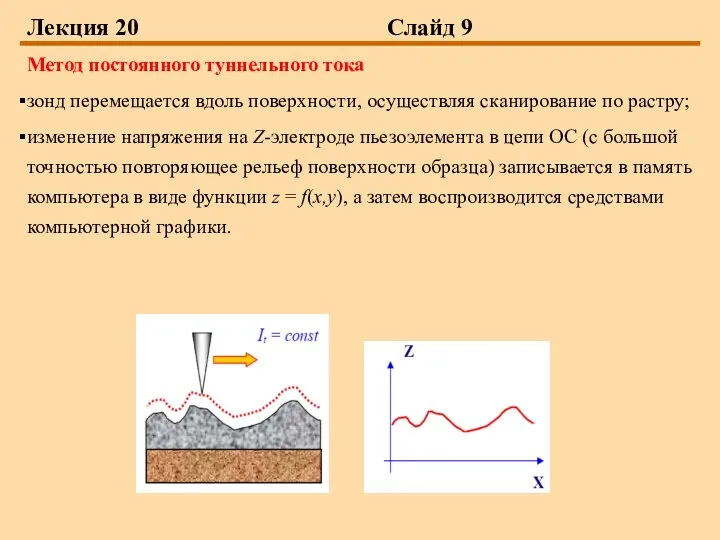
- 9. Лекция 20 Слайд 9 Метод постоянного туннельного тока зонд перемещается вдоль поверхности, осуществляя сканирование по растру;
- 10. Лекция 10 Слайд 10 Метод постоянной высоты (Z = const) Более эффективный при исследовании атомарно гладких
- 11. Лекция 20 Слайд 11 Высокое разрешение СТМ по оси Z (доли ангстрема) определяется экспоненциальной зависимостью туннельного
- 12. Лекция 20 Слайд 12 Для неоднородных образцов туннельный ток является не только функцией расстояния от зонда
- 13. Лекция 20 Слайд 13 Частота модуляции ω выбирается выше частоты полосы пропускания петли обратной связи, чтобы
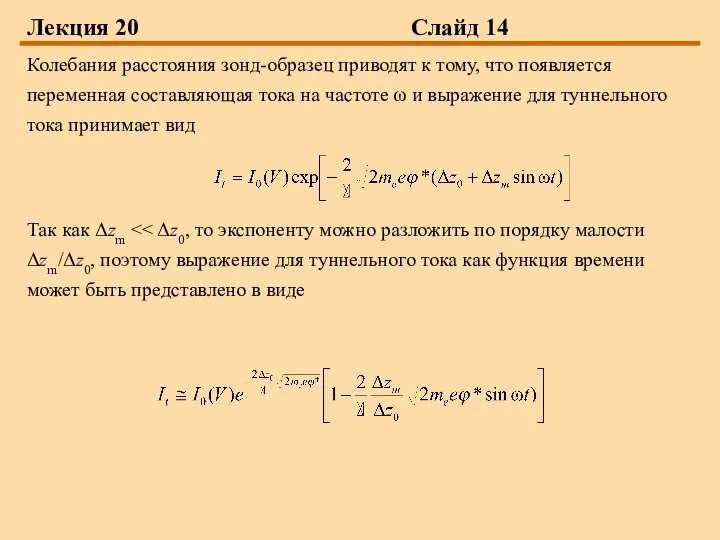
- 14. Лекция 20 Слайд 14 Колебания расстояния зонд-образец приводят к тому, что появляется переменная составляющая тока на
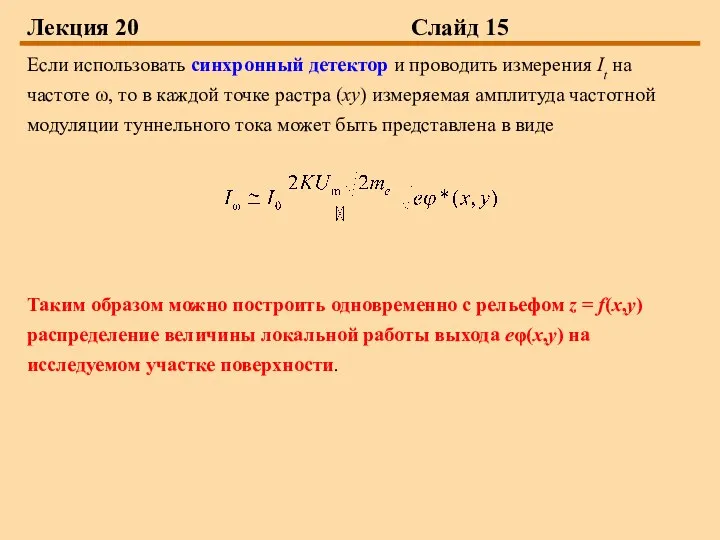
- 15. Лекция 20 Слайд 15 Если использовать синхронный детектор и проводить измерения It на частоте ω, то
- 17. Скачать презентацию
Лекция 20 Слайд 2
Исторически первым в семействе зондовых микроскопов появился сканирующий туннельный
Лекция 20 Слайд 2
Исторически первым в семействе зондовых микроскопов появился сканирующий туннельный
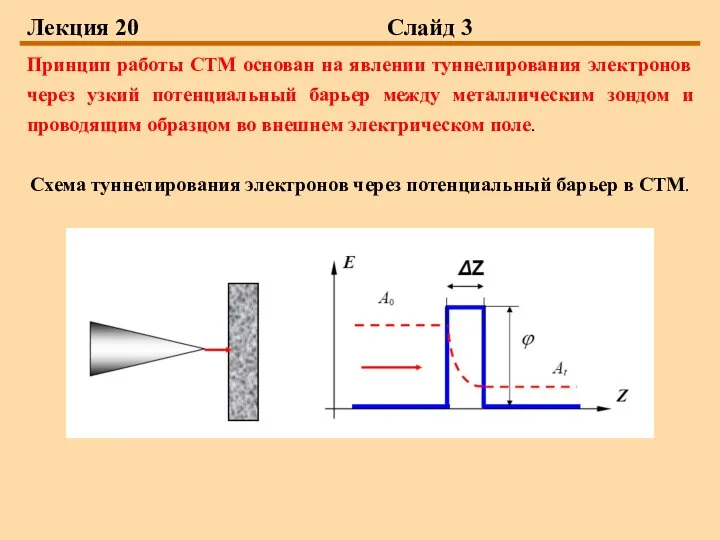
Лекция 20 Слайд 3
Принцип работы СТМ основан на явлении туннелирования электронов через
Лекция 20 Слайд 3
Принцип работы СТМ основан на явлении туннелирования электронов через
Лекция 20 Слайд 4
В СТМ зонд подводится к поверхности образца на
Лекция 20 Слайд 4
В СТМ зонд подводится к поверхности образца на
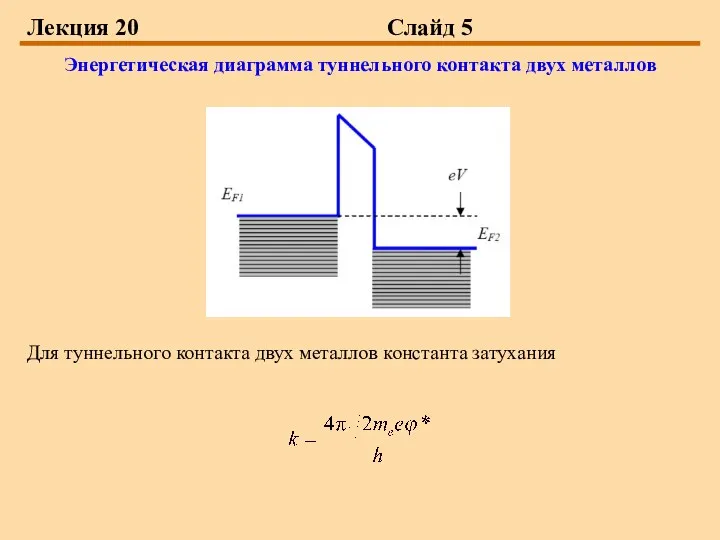
Лекция 20 Слайд 5
Энергетическая диаграмма туннельного контакта двух металлов
Для туннельного контакта двух
Лекция 20 Слайд 5
Энергетическая диаграмма туннельного контакта двух металлов
Для туннельного контакта двух
Лекция 20 Слайд 6
При приложении к туннельному контакту разности потенциалов V между
Лекция 20 Слайд 6
При приложении к туннельному контакту разности потенциалов V между
Лекция 20 Слайд 7
При условии малости напряжения смещения V << ϕ данное
Лекция 20 Слайд 7
При условии малости напряжения смещения V << ϕ данное
Лекция 20 Слайд 8
Экспоненциальная зависимость туннельного тока от расстояния позволяет осуществлять регулирование
Лекция 20 Слайд 8
Экспоненциальная зависимость туннельного тока от расстояния позволяет осуществлять регулирование
Лекция 20 Слайд 9
Метод постоянного туннельного тока
зонд перемещается вдоль поверхности, осуществляя сканирование
Лекция 20 Слайд 9
Метод постоянного туннельного тока
зонд перемещается вдоль поверхности, осуществляя сканирование
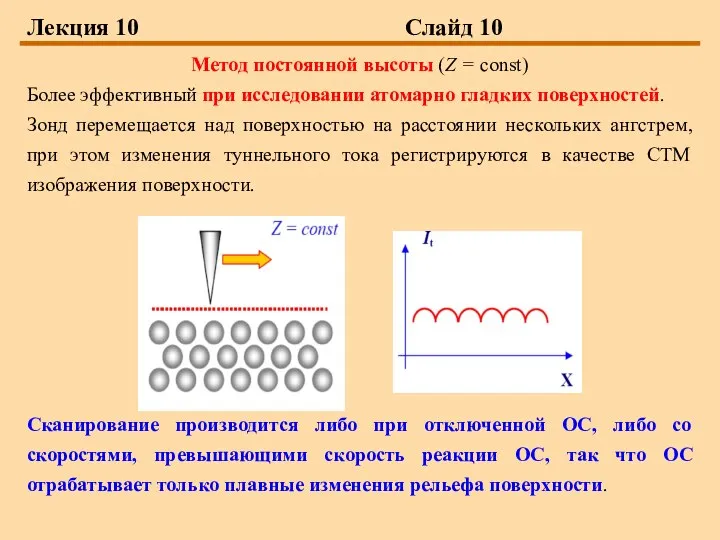
Лекция 10 Слайд 10
Метод постоянной высоты (Z = const)
Более эффективный при
Лекция 10 Слайд 10
Метод постоянной высоты (Z = const)
Более эффективный при
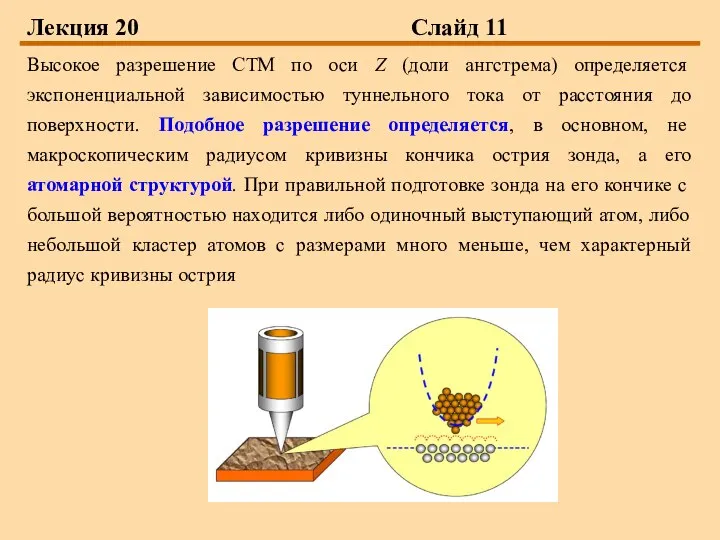
Лекция 20 Слайд 11
Высокое разрешение СТМ по оси Z (доли ангстрема)
Лекция 20 Слайд 11
Высокое разрешение СТМ по оси Z (доли ангстрема)
Лекция 20 Слайд 12
Для неоднородных образцов туннельный ток является не только
Лекция 20 Слайд 12
Для неоднородных образцов туннельный ток является не только
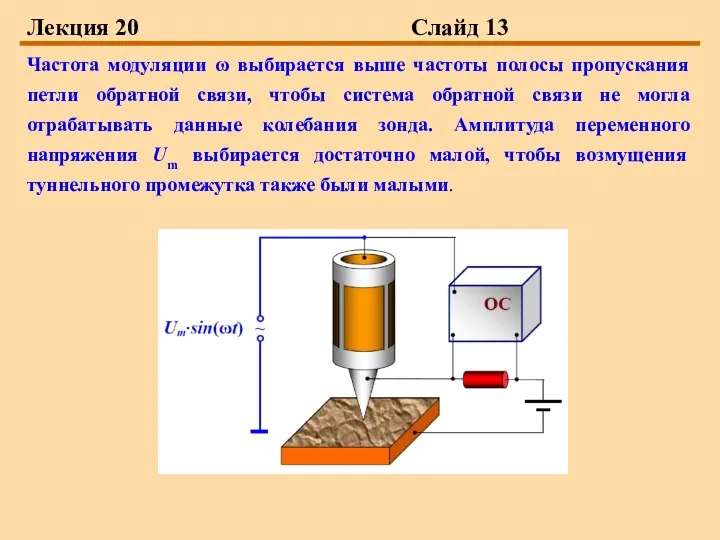
Лекция 20 Слайд 13
Частота модуляции ω выбирается выше частоты полосы пропускания
Лекция 20 Слайд 13
Частота модуляции ω выбирается выше частоты полосы пропускания
Лекция 20 Слайд 14
Колебания расстояния зонд-образец приводят к тому, что появляется
Лекция 20 Слайд 14
Колебания расстояния зонд-образец приводят к тому, что появляется
Лекция 20 Слайд 15
Если использовать синхронный детектор и проводить измерения It
Лекция 20 Слайд 15
Если использовать синхронный детектор и проводить измерения It
 Аттестационная работа. Разработка по выполнению исследовательской работы с учащимися «Быт села Каразей. От печи до камина»
Аттестационная работа. Разработка по выполнению исследовательской работы с учащимися «Быт села Каразей. От печи до камина» Жилая среда
Жилая среда Пять координационных механизмов по Г. Минцбергу
Пять координационных механизмов по Г. Минцбергу смекай, считай, отгадывай презентация_
смекай, считай, отгадывай презентация_ Понятие и сущность организации
Понятие и сущность организации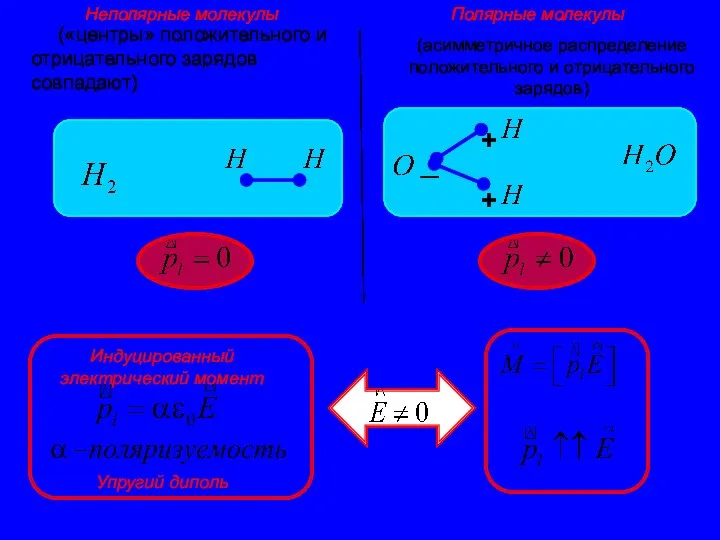 Поляризация диэлектриков
Поляризация диэлектриков  ТСТ Trust Capital Trade – формула несокрушимой торговли
ТСТ Trust Capital Trade – формула несокрушимой торговли Мультиметр
Мультиметр РАЗВИТИЕ ТВОРЧЕСКИХ СПОСОБНОСТЕЙ МЛАДШИХ ШКОЛЬНИКОВ Выполнила: Кучмасова С.А. учитель начальных классов
РАЗВИТИЕ ТВОРЧЕСКИХ СПОСОБНОСТЕЙ МЛАДШИХ ШКОЛЬНИКОВ Выполнила: Кучмасова С.А. учитель начальных классов  Вода - растворитель. Значение воды - презентация для начальной школы
Вода - растворитель. Значение воды - презентация для начальной школы Арабский халифат. (6 класс)
Арабский халифат. (6 класс) Php Oպերատորները
Php Oպերատորները Логическое выражение
Логическое выражение Дисгармоничное развитие
Дисгармоничное развитие Стандартизация, сертификация и товароведение. Про специальность
Стандартизация, сертификация и товароведение. Про специальность Стратегический менеджмент. Этапы стратегического управления
Стратегический менеджмент. Этапы стратегического управления Почему в лесу нужно соблюдать тишину? Автор: Кульчицкая И.Н. Учитель начальных классов.
Почему в лесу нужно соблюдать тишину? Автор: Кульчицкая И.Н. Учитель начальных классов. Материалы к педсовету Работа по теме самообразования учителя русского языка и литературы Паньшиной И.С.
Материалы к педсовету Работа по теме самообразования учителя русского языка и литературы Паньшиной И.С. Класс МЛЕКОПИТАЮЩИЕ MAMMALIA
Класс МЛЕКОПИТАЮЩИЕ MAMMALIA Психолог начальной школы ГОУ СОШ № 581 Родителям учащихся 9.12.2010
Психолог начальной школы ГОУ СОШ № 581 Родителям учащихся 9.12.2010 Увидеть Россию
Увидеть Россию Архыз - 2018. Карачаево-Черкесия
Архыз - 2018. Карачаево-Черкесия Определение чувствительности к антибиотикам. Культивирование анаэробов. Диагностика с помощью бактериофагов
Определение чувствительности к антибиотикам. Культивирование анаэробов. Диагностика с помощью бактериофагов  Виды дисперсий
Виды дисперсий  Чувашская национально-культурная автономия г. Челябинска. Молодёжная организация «Креативная Команда «Кадэрне»
Чувашская национально-культурная автономия г. Челябинска. Молодёжная организация «Креативная Команда «Кадэрне» Теплопроводность бетона
Теплопроводность бетона Что такое функция ? - презентация по Алгебре
Что такое функция ? - презентация по Алгебре Интернационализация, транснационализация, глобализация МЭ
Интернационализация, транснационализация, глобализация МЭ