- Принцип действия магнитно-силового микроскопа (АСМ). Квазистатические методики в МСМ

Содержание
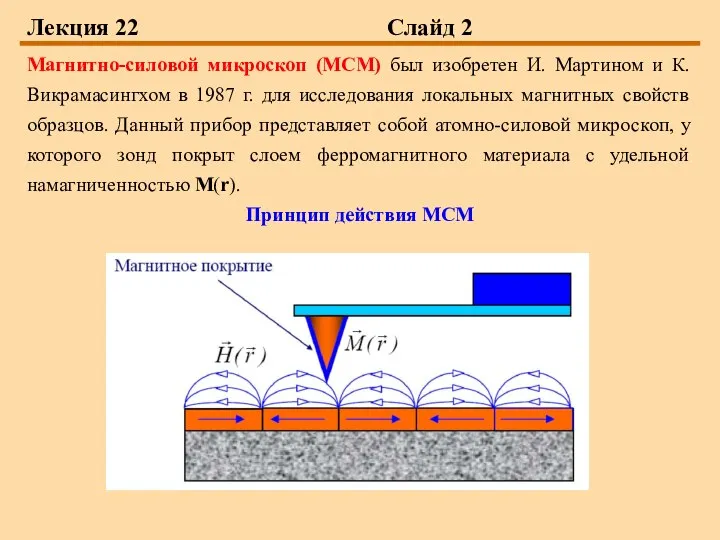
- 2. Лекция 22 Слайд 2 Магнитно-силовой микроскоп (МСМ) был изобретен И. Мартином и К. Викрамасингхом в 1987
- 3. Лекция 22 Слайд 3 В общем случае описание взаимодействия зонда МСМ с полем образца H(r) представляет
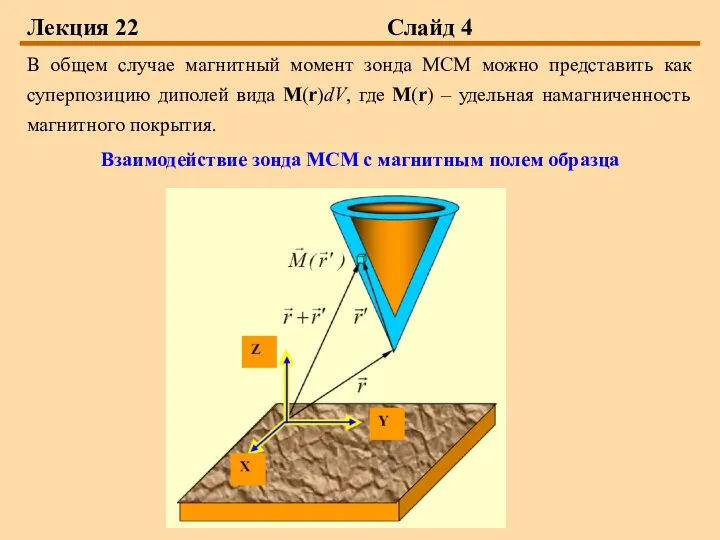
- 4. Лекция 22 Слайд 4 В общем случае магнитный момент зонда МСМ можно представить как суперпозицию диполей
- 5. Лекция 22 Слайд 5 Полная энергия магнитного взаимодействия зонда и образца в соответствие с предыдущим рисунком
- 6. Лекция 22 Слайд 6 Квазистатические методики Для образцов, имеющих слабо развитый рельеф поверхности. МСМ изображение поверхности
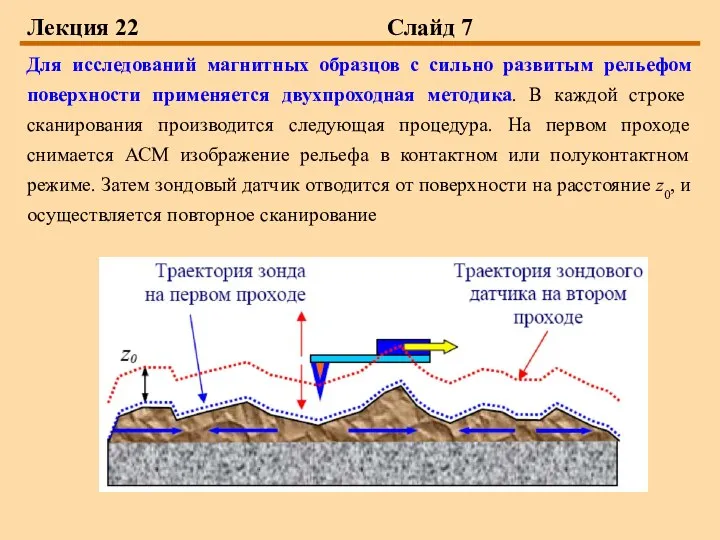
- 7. Лекция 22 Слайд 7 Для исследований магнитных образцов с сильно развитым рельефом поверхности применяется двухпроходная методика.
- 8. Лекция 22 Слайд 8 Расстояние z0 выбирается таким образом, чтобы сила Ван-дер-Ваальса была меньше силы магнитного
- 9. Лекция 22 Слайд 9 Колебательные методики Применение колебательных методик в магнитно-силовой микроскопии позволяет реализовать большую (по
- 10. Лекция 22 Слайд 10 Для получения МСМ изображения поверхности используется двухпроходная методика. С помощью пьезовибратора возбуждаются
- 11. Лекция 22 Слайд 11 Изменения амплитуды и сдвиг фазы колебаний, связанные с вариациями градиента силы, при
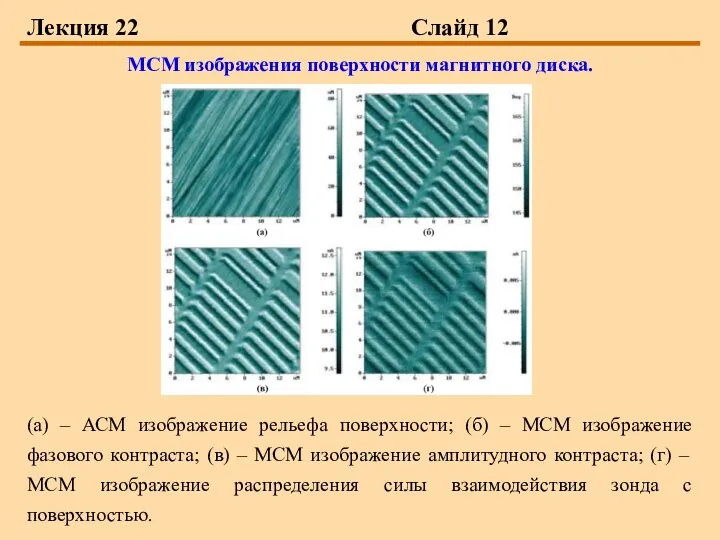
- 12. Лекция 22 Слайд 12 МСМ изображения поверхности магнитного диска. (а) – АСМ изображение рельефа поверхности; (б)
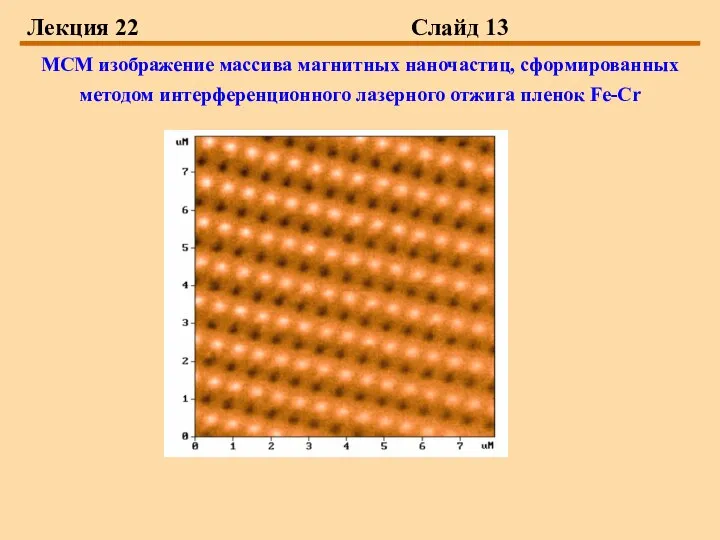
- 13. Лекция 22 Слайд 13 МСМ изображение массива магнитных наночастиц, сформированных методом интерференционного лазерного отжига пленок Fe-Cr
- 14. Лекция 22 Слайд 14 Недостатком контактных АСМ методик является непосредственное механическое взаимодействие зонда с поверхностью. Это
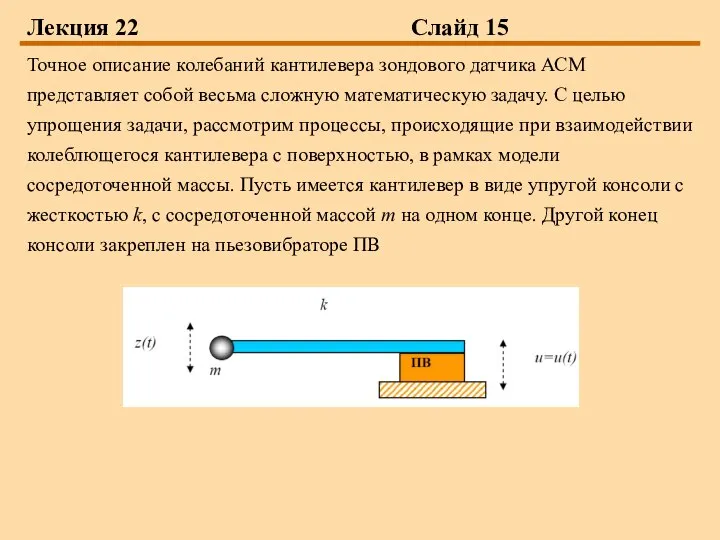
- 15. Лекция 22 Слайд 15 Точное описание колебаний кантилевера зондового датчика АСМ представляет собой весьма сложную математическую
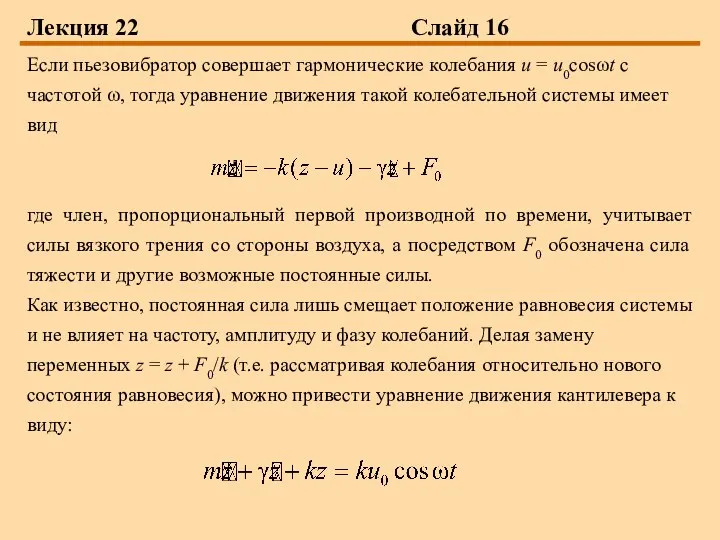
- 16. Лекция 22 Слайд 16 Если пьезовибратор совершает гармонические колебания u = u0cosωt с частотой ω, тогда
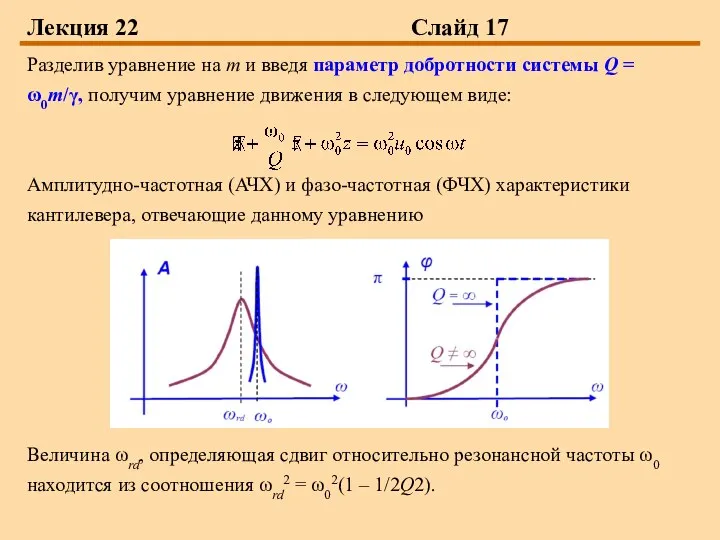
- 17. Лекция 22 Слайд 17 Разделив уравнение на m и введя параметр добротности системы Q = ω0m/γ,
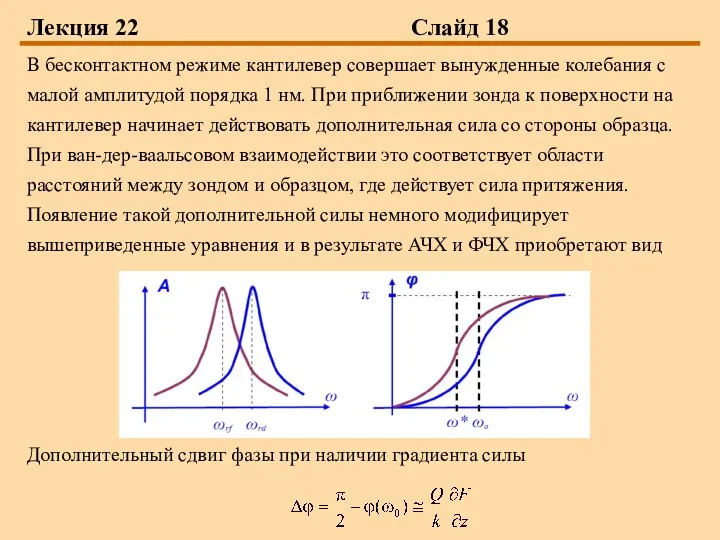
- 18. Лекция 22 Слайд 18 В бесконтактном режиме кантилевер совершает вынужденные колебания с малой амплитудой порядка 1
- 19. Лекция 22 Слайд 19 Регистрация изменения амплитуды и фазы колебаний кантилевера в бесконтактном режиме требует высокой
- 21. Скачать презентацию
Лекция 22 Слайд 2
Магнитно-силовой микроскоп (МСМ) был изобретен И. Мартином и К.
Лекция 22 Слайд 2
Магнитно-силовой микроскоп (МСМ) был изобретен И. Мартином и К.
Лекция 22 Слайд 3
В общем случае описание взаимодействия зонда МСМ с полем
Лекция 22 Слайд 3
В общем случае описание взаимодействия зонда МСМ с полем
Лекция 22 Слайд 4
В общем случае магнитный момент зонда МСМ можно представить
Лекция 22 Слайд 4
В общем случае магнитный момент зонда МСМ можно представить
Лекция 22 Слайд 5
Полная энергия магнитного взаимодействия зонда и образца в соответствие
Лекция 22 Слайд 5
Полная энергия магнитного взаимодействия зонда и образца в соответствие
Лекция 22 Слайд 6
Квазистатические методики
Для образцов, имеющих слабо развитый рельеф поверхности.
МСМ изображение
Лекция 22 Слайд 6
Квазистатические методики
Для образцов, имеющих слабо развитый рельеф поверхности.
МСМ изображение
Лекция 22 Слайд 7
Для исследований магнитных образцов с сильно развитым рельефом поверхности
Лекция 22 Слайд 7
Для исследований магнитных образцов с сильно развитым рельефом поверхности
Лекция 22 Слайд 8
Расстояние z0 выбирается таким образом, чтобы сила Ван-дер-Ваальса была
Лекция 22 Слайд 8
Расстояние z0 выбирается таким образом, чтобы сила Ван-дер-Ваальса была
Лекция 22 Слайд 9
Колебательные методики
Применение колебательных методик в магнитно-силовой микроскопии позволяет реализовать
Лекция 22 Слайд 9
Колебательные методики
Применение колебательных методик в магнитно-силовой микроскопии позволяет реализовать
Лекция 22 Слайд 10
Для получения МСМ изображения поверхности используется двухпроходная методика.
С
Лекция 22 Слайд 10
Для получения МСМ изображения поверхности используется двухпроходная методика.
С
Лекция 22 Слайд 11
Изменения амплитуды и сдвиг фазы колебаний, связанные с
Лекция 22 Слайд 11
Изменения амплитуды и сдвиг фазы колебаний, связанные с
Лекция 22 Слайд 12
МСМ изображения поверхности магнитного диска.
(а) – АСМ изображение
Лекция 22 Слайд 12
МСМ изображения поверхности магнитного диска.
(а) – АСМ изображение
Лекция 22 Слайд 13
МСМ изображение массива магнитных наночастиц, сформированных методом интерференционного
Лекция 22 Слайд 13
МСМ изображение массива магнитных наночастиц, сформированных методом интерференционного
Лекция 22 Слайд 14
Недостатком контактных АСМ методик является непосредственное механическое взаимодействие
Лекция 22 Слайд 14
Недостатком контактных АСМ методик является непосредственное механическое взаимодействие
Лекция 22 Слайд 15
Точное описание колебаний кантилевера зондового датчика АСМ представляет
Лекция 22 Слайд 15
Точное описание колебаний кантилевера зондового датчика АСМ представляет
Лекция 22 Слайд 16
Если пьезовибратор совершает гармонические колебания u = u0cosωt
Лекция 22 Слайд 16
Если пьезовибратор совершает гармонические колебания u = u0cosωt
Лекция 22 Слайд 17
Разделив уравнение на m и введя параметр добротности
Лекция 22 Слайд 17
Разделив уравнение на m и введя параметр добротности
Лекция 22 Слайд 18
В бесконтактном режиме кантилевер совершает вынужденные колебания с
Лекция 22 Слайд 18
В бесконтактном режиме кантилевер совершает вынужденные колебания с
Лекция 22 Слайд 19
Регистрация изменения амплитуды и фазы колебаний кантилевера в
Лекция 22 Слайд 19
Регистрация изменения амплитуды и фазы колебаний кантилевера в
 Непрерывные коды
Непрерывные коды Урок по китайскому языку. (Урок 10)
Урок по китайскому языку. (Урок 10) Производительность
Производительность Детям о ПБП на ДЖ транспорте - презентация для начальной школы
Детям о ПБП на ДЖ транспорте - презентация для начальной школы Презентация на тему "Мониторинг как инструмент оценки качества образовательных результатов учащихся" - скачать презентации
Презентация на тему "Мониторинг как инструмент оценки качества образовательных результатов учащихся" - скачать презентации  Крымская война 1853—1856 Выполнила студентка Группы Ю-104 Чуева Яна
Крымская война 1853—1856 Выполнила студентка Группы Ю-104 Чуева Яна Szczeciński Park Naukowo-Technologiczny
Szczeciński Park Naukowo-Technologiczny Выборочный контроль ЛС отечественного и зарубежного производства, находящиеся в сфере обращения
Выборочный контроль ЛС отечественного и зарубежного производства, находящиеся в сфере обращения Михаи́л Васи́льевич Ломоно́сов
Михаи́л Васи́льевич Ломоно́сов Информационные ресурсы негуманитарных областей науки и практики
Информационные ресурсы негуманитарных областей науки и практики Творчество душевнобольных
Творчество душевнобольных Клуб супер математиков - презентация по Алгебре
Клуб супер математиков - презентация по Алгебре Традиционные праздники и социализация детей народов Поволжья
Традиционные праздники и социализация детей народов Поволжья Geometria.ru - cоциальная сеть о клубной и ночной жизни - презентация
Geometria.ru - cоциальная сеть о клубной и ночной жизни - презентация Правовое обеспечение мультимедийного контента
Правовое обеспечение мультимедийного контента «КРАСОТА РУССКОГО ЖЕНСКОГО КОСТЮМА» Апрель, 2009 г.
«КРАСОТА РУССКОГО ЖЕНСКОГО КОСТЮМА» Апрель, 2009 г. Е.И.Чарушин «Кабан» Составитель: Шаршукова В.А., учитель начальных классов МАОУСОШ № 8 г.Старая Русса Новгородской области
Е.И.Чарушин «Кабан» Составитель: Шаршукова В.А., учитель начальных классов МАОУСОШ № 8 г.Старая Русса Новгородской области Исторические этапы развития коммуникаций. Общинная коммуникационная система
Исторические этапы развития коммуникаций. Общинная коммуникационная система Важность физкультуры для молодёжи
Важность физкультуры для молодёжи Муниципальное образовательное учреждение средняя общеобразовательная школа №93 Барабинского района Новосибирской области
Муниципальное образовательное учреждение средняя общеобразовательная школа №93 Барабинского района Новосибирской области  Архитектура итальянского Возрождения Выполнила: Учитель музыки и МХК ГОУ СОШ № 249 СВАО г. Москвы
Архитектура итальянского Возрождения Выполнила: Учитель музыки и МХК ГОУ СОШ № 249 СВАО г. Москвы  Алгебра 8 класс.
Алгебра 8 класс.  Экономика электронного бизнеса и информационных систем
Экономика электронного бизнеса и информационных систем Построение диаграмм. Типы диаграмм – Точечная, поверхность
Построение диаграмм. Типы диаграмм – Точечная, поверхность Сервитутное право в Римском праве Выполнила Мамочкина Юля
Сервитутное право в Римском праве Выполнила Мамочкина Юля  Работа с реестром (Лекция № 5)
Работа с реестром (Лекция № 5) Система и источники административного права как отрасли права, науки и учебной дисциплины
Система и источники административного права как отрасли права, науки и учебной дисциплины Дифференциация в обучении – ключ к сохранению индивидуальности «Обучение должно быть вариативным и индивидуальным особенностям
Дифференциация в обучении – ключ к сохранению индивидуальности «Обучение должно быть вариативным и индивидуальным особенностям