- СУЭП переменного тока

Содержание
- 2. Тиристорный преобразователь напряжения - управляемый преобразователь переменного напряжения. Схемы включения тиристорных регуляторов напряжения
- 3. Схемы замещения асинхронного двигателя. При закрытых тиристорах При открытом тиристоре
- 4. Решение этого уравнения относительно тока нагрузки i При этом принужденная составляющая где а свободная составляющая тока
- 5. U = Um⋅sin(ω⋅t) при α ≤ ω⋅t ≤ α+λ ; I = 0 или U =
- 6. Диаграмма фазных напряжений и токов
- 7. Система импульсно-фазового управления Ограничительные требования к СИФУ по ширине отпирающих импульсов Основные узлы СИФУ: аналогово-цифровой преобразователь,
- 8. Принципиальная схема одноканальной СИФУ
- 9. АИП выполнен на элементах А1, А2, D1, интегрирующей цепи С1R13 и дифференцирующей цепи C2R15. Генератор выполнен
- 10. При сбросе счётчика D5 в нулевое состояние на шестом выходе дешифратора D7 устанавливается единичный уровень. Этот
- 11. Система управления асинхронного электропривода ТРН - АД с суммирующим усилителем. Используя схемы замещения двигателя (см.рис.), можно
- 12. Система автоматического регулирования скорости с тиристорным
- 13. Принцип стабилизации скорости двигателя при изменении момента нагрузки в данной системе можно пояснить рисунком: Анализ статических
- 14. Окончательно выражение для напряжения обратной связи по току примет вид: Обозначая Первое уравнение запишется в виде
- 15. Для получения аналитического выражения механической характеристики M = Mωср⋅U1*2 В этом случае при анализе удобно использовать
- 16. Значение скорости ωо1 (скорость в точке а) можно определить по заданному статизму и диапазону регулирования скорости:
- 17. Отсюда Определение необходимого значения KТ производится при пуске двигателя. KА1⋅Kф⋅[Uз−KR⋅KТ⋅(I1доп - I1отс)] = αmax − αдоп
- 18. Расчёт системы ТРН - АД с подчинённым регулирования координат. Система ТРН - АД с подчинённым регулированием
- 19. Электромагнитный момент двигателя в переходном режиме Если ввести допущения: принять γ1 ~σ /2 и γ2 ~2SK
- 20. Т.е. электромагнитный момент двигателя в переходных режимах может быть представлен тремя составляющими: установившейся (Муст = Мп);
- 21. Произведём настройку регуляторов при синтезе системы на технический оптимум. За малую постоянную времени внутреннего контура примем
- 22. ПФ регулятора целесообразно разбить на два звена с ПФ и 1/(2TμKмKпKомр). Такая разбивка обусловлена тем, что
- 24. Скачать презентацию

Тиристорный преобразователь напряжения - управляемый
преобразователь переменного напряжения.
Схемы включения тиристорных регуляторов напряжения
Тиристорный преобразователь напряжения - управляемый
преобразователь переменного напряжения.
Схемы включения тиристорных регуляторов напряжения

Схемы замещения асинхронного двигателя.
При закрытых тиристорах
При открытом тиристоре
Схемы замещения асинхронного двигателя.
При закрытых тиристорах
При открытом тиристоре
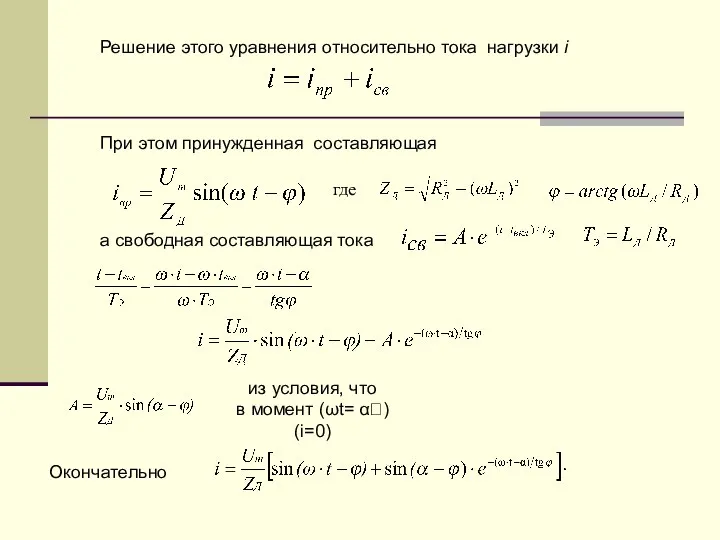
Решение этого уравнения относительно тока нагрузки i
При этом принужденная составляющая
Решение этого уравнения относительно тока нагрузки i
При этом принужденная составляющая
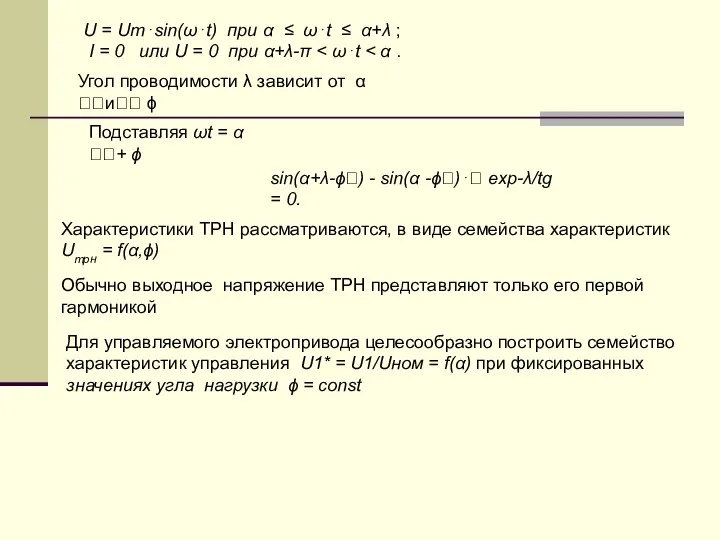
U = Um⋅sin(ω⋅t) при α ≤ ω⋅t ≤ α+λ ;
I = 0
U = Um⋅sin(ω⋅t) при α ≤ ω⋅t ≤ α+λ ;
I = 0
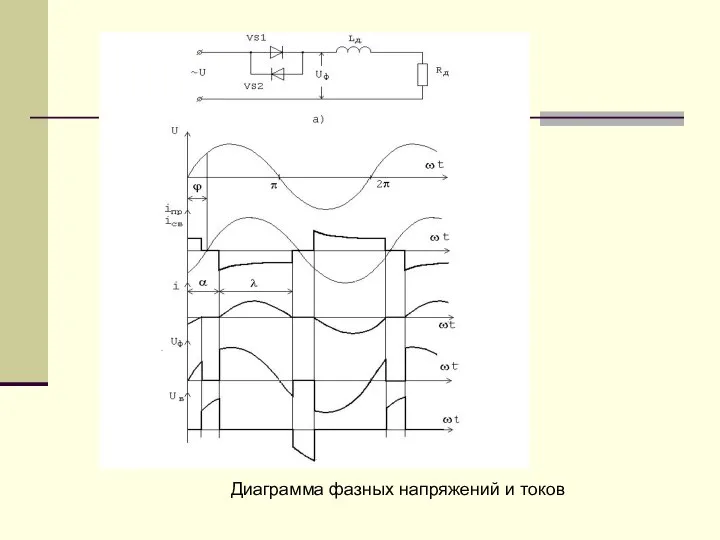
Диаграмма фазных напряжений и токов
Диаграмма фазных напряжений и токов

Система импульсно-фазового управления
Ограничительные требования к СИФУ по ширине отпирающих импульсов
Система импульсно-фазового управления
Ограничительные требования к СИФУ по ширине отпирающих импульсов

Принципиальная схема одноканальной СИФУ
Принципиальная схема одноканальной СИФУ
АИП выполнен на элементах А1, А2, D1, интегрирующей цепи С1R13
и
АИП выполнен на элементах А1, А2, D1, интегрирующей цепи С1R13
и

При сбросе счётчика D5 в нулевое состояние на шестом выходе
дешифратора
При сбросе счётчика D5 в нулевое состояние на шестом выходе
дешифратора
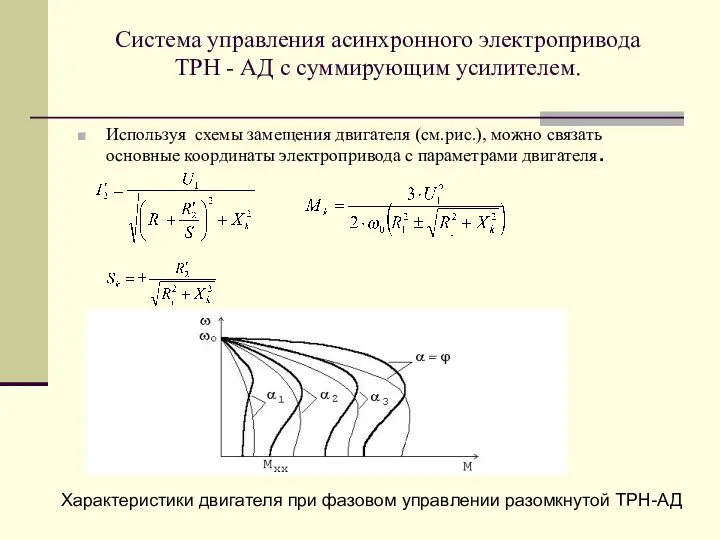
Система управления асинхронного электропривода
ТРН - АД с суммирующим усилителем.
Используя схемы замещения
Система управления асинхронного электропривода
ТРН - АД с суммирующим усилителем.
Используя схемы замещения

Система автоматического регулирования скорости с тиристорным
Система автоматического регулирования скорости с тиристорным
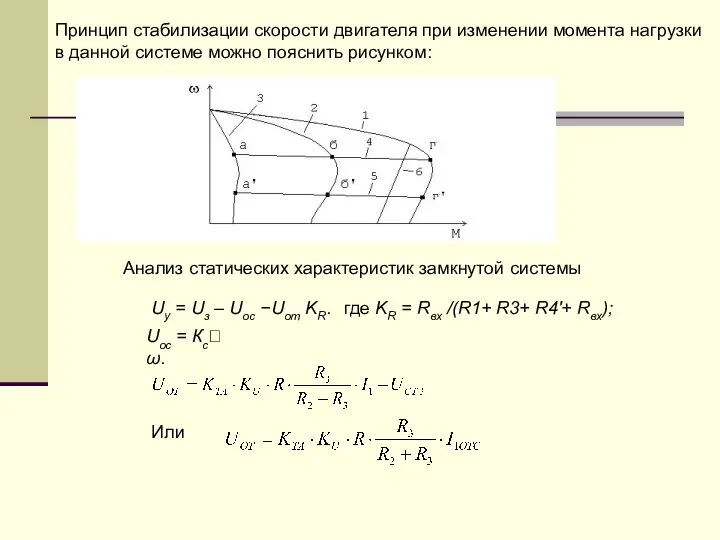
Принцип стабилизации скорости двигателя при изменении момента нагрузки
в данной системе
Принцип стабилизации скорости двигателя при изменении момента нагрузки
в данной системе
Окончательно выражение для напряжения обратной связи по току примет вид:
Обозначая
Первое
Окончательно выражение для напряжения обратной связи по току примет вид:
Обозначая
Первое

Для получения аналитического выражения механической характеристики
M = Mωср⋅U1*2
В этом
Для получения аналитического выражения механической характеристики
M = Mωср⋅U1*2
В этом
Значение скорости ωо1 (скорость в точке а) можно определить по заданному
Значение скорости ωо1 (скорость в точке а) можно определить по заданному

Отсюда
Определение необходимого значения KТ производится при пуске двигателя.
KА1⋅Kф⋅[Uз−KR⋅KТ⋅(I1доп - I1отс)]
Отсюда
Определение необходимого значения KТ производится при пуске двигателя.
KА1⋅Kф⋅[Uз−KR⋅KТ⋅(I1доп - I1отс)]

Расчёт системы ТРН - АД с подчинённым регулирования координат.
Система ТРН -
Расчёт системы ТРН - АД с подчинённым регулирования координат.
Система ТРН -

Электромагнитный момент двигателя в переходном режиме
Если ввести допущения:
принять γ1
Электромагнитный момент двигателя в переходном режиме
Если ввести допущения:
принять γ1

Т.е. электромагнитный момент двигателя в переходных режимах может
быть представлен тремя
Т.е. электромагнитный момент двигателя в переходных режимах может
быть представлен тремя
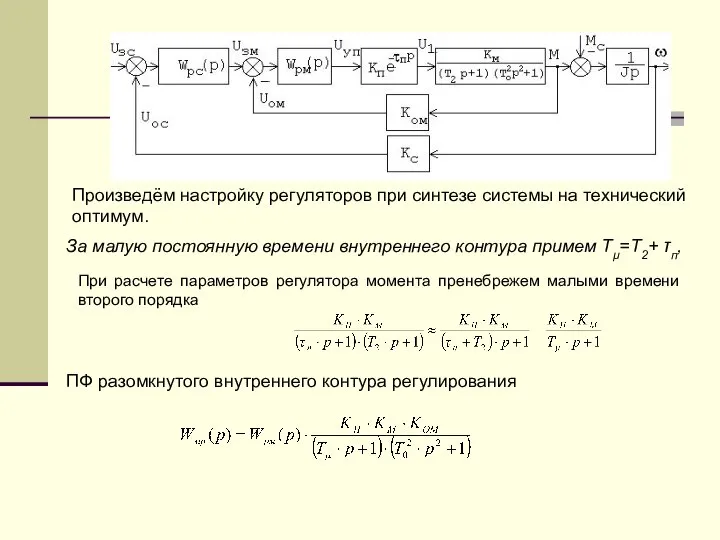
Произведём настройку регуляторов при синтезе системы на технический оптимум.
За малую
Произведём настройку регуляторов при синтезе системы на технический оптимум.
За малую

ПФ регулятора целесообразно разбить на два звена с ПФ и
1/(2TμKмKпKомр).
ПФ регулятора целесообразно разбить на два звена с ПФ и
1/(2TμKмKпKомр).
 Сердечно-сосудистая система Ангиология – наука о сосудах Сердце
Сердечно-сосудистая система Ангиология – наука о сосудах Сердце Ресайклеры. Курс базового уровня Б-005
Ресайклеры. Курс базового уровня Б-005 Презентация "Художественные открытия Серебряного века русской культуры" - скачать презентации по МХК
Презентация "Художественные открытия Серебряного века русской культуры" - скачать презентации по МХК Презентация "Применение спектрального анализа и различных видов излучения для определения подлинности произведений искусства
Презентация "Применение спектрального анализа и различных видов излучения для определения подлинности произведений искусства Проводники в электростатическом поле
Проводники в электростатическом поле Физиологическая основа внимания
Физиологическая основа внимания Акции на Одинцовских курганах 2019
Акции на Одинцовских курганах 2019 Самые выдающиеся запатентованные изобретения
Самые выдающиеся запатентованные изобретения  Направляющие прямолинейного движения с трением качения
Направляющие прямолинейного движения с трением качения Тема: ОТНОШЕНИЯ СОБСТВЕННОСТИ В РЫНОЧНОЙ ЭКОНОМИКЕ. Вопросы: Сущность собственности как экономической к
Тема: ОТНОШЕНИЯ СОБСТВЕННОСТИ В РЫНОЧНОЙ ЭКОНОМИКЕ. Вопросы: Сущность собственности как экономической к Интегрированные системы менеджмента в техносфере
Интегрированные системы менеджмента в техносфере ДОРОЖНЫЕ ЗНАКИ Воспитатель МБОУ «Кыновская СОШ №:65» Структурного подразделения «Детский сад ст. Кын» п. Кын, Лысьвенский район,
ДОРОЖНЫЕ ЗНАКИ Воспитатель МБОУ «Кыновская СОШ №:65» Структурного подразделения «Детский сад ст. Кын» п. Кын, Лысьвенский район,  Познание духовной природы мужчины и женщины - путь к гармонии
Познание духовной природы мужчины и женщины - путь к гармонии Магнийорганические соединения
Магнийорганические соединения  сметана
сметана Функции банка Подготовили: Шибанов Иван Титов Михаил
Функции банка Подготовили: Шибанов Иван Титов Михаил  Презентация на тему "Урок знаний 5 класс" - скачать презентации по Педагогике
Презентация на тему "Урок знаний 5 класс" - скачать презентации по Педагогике Счётчики. Лекция 4
Счётчики. Лекция 4 Истоки русского театра
Истоки русского театра VVED_Aминокислоты_Б19
VVED_Aминокислоты_Б19 Обучающий семинар для тьюторов проекта «Школьный стандарт профилактики» Ведущие: Екатерина Львовна Лашевская, начальник инфор
Обучающий семинар для тьюторов проекта «Школьный стандарт профилактики» Ведущие: Екатерина Львовна Лашевская, начальник инфор Свойства формовочных и стержневых смесей
Свойства формовочных и стержневых смесей Проф заболевания кожи (Тебенихин)
Проф заболевания кожи (Тебенихин) Паркур
Паркур Корпоративная культура (3). Семейная модель корпоративного управления
Корпоративная культура (3). Семейная модель корпоративного управления Тема 1. Финансы предприятий и финансовый менеджмент
Тема 1. Финансы предприятий и финансовый менеджмент  Частные вопросы гигиены труда
Частные вопросы гигиены труда  Трансформаторы. Трансформатор ОДЦЭ-5000/25Б
Трансформаторы. Трансформатор ОДЦЭ-5000/25Б