- Роботоассистированная эндовидеохирургия настоящее и будущее

Содержание
- 2. Назад в прошлое История развития хирургических роботических систем начинается с использования в нейрохирургической манипуляции в I985
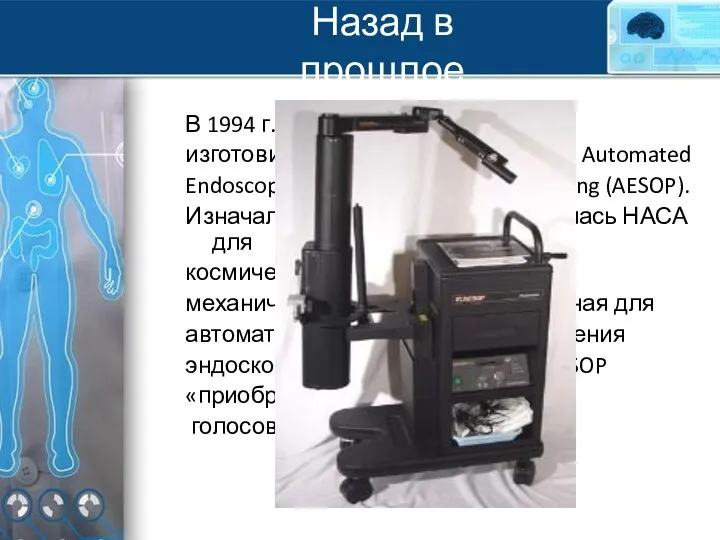
- 3. Назад в прошлое В 1994 г. компания Computer Motion изготовила первого робота-хирурга Automated Endoscopic System for
- 4. Назад в прошлое Следующим шагом в эволюции роботической хирургии стало развитие дистанционной телероботической хирургии. Концепция данного
- 5. Настоящее Будущее Настоящее представлено системой Da Vinci
- 6. Преимущества благодаря системе можно добиться высокой степени точности действий и широкую амплитуду движений. Имея визуальную и
- 7. Преимущества в первую очередь такая процедура для пациента наиболее безопасна; исключается вероятность большой потери крови; уменьшается
- 8. Преимущества и недостатки
- 9. Преимущества и недостатки
- 10. Недостатки роботизированная хирургия является новой технологией, поэтому многие операции должны быть переработаны для оптимизации и повышения
- 11. Область применения
- 12. Хирургия бариатрическая хирургия миотомия по Геллеру холецистэктомия грыжа
- 13. Фильмы
- 14. Будущее Чего же можно ожидать от роботохирургии В будущем? Продолжаются работы посозданию новых роботов. Уже доступна
- 15. “Руки” робота смогут двигаться в такт сокращениям, постоянно оставаясь на одинаковом расстоянии от зоны оперативного вмешательства
- 17. Скачать презентацию
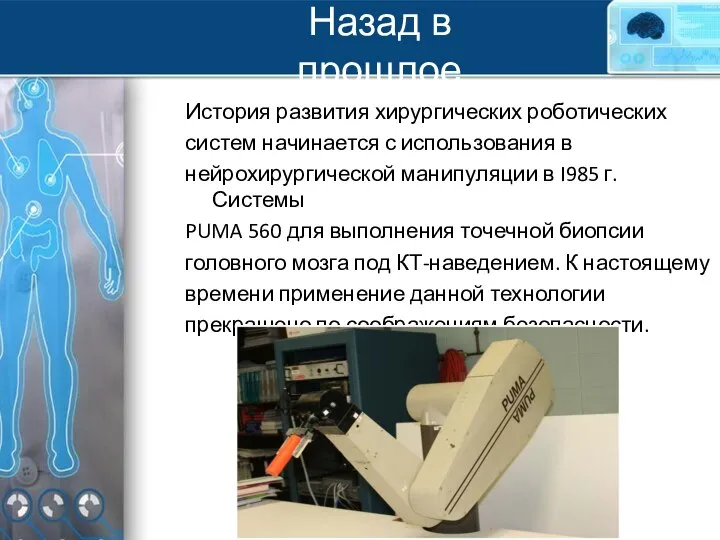
Назад в прошлое
История развития хирургических роботических
систем начинается с использования в
нейрохирургической манипуляции
Назад в прошлое
История развития хирургических роботических
систем начинается с использования в
нейрохирургической манипуляции
Назад в прошлое
В 1994 г. компания Computer Motion
изготовила первого
Назад в прошлое
В 1994 г. компания Computer Motion
изготовила первого

Назад в прошлое
Следующим шагом в эволюции роботической
хирургии стало развитие дистанционной
телероботической хирургии.
Назад в прошлое
Следующим шагом в эволюции роботической
хирургии стало развитие дистанционной
телероботической хирургии.

Настоящее
Будущее
Настоящее представлено системой Da Vinci
Настоящее
Будущее
Настоящее представлено системой Da Vinci
Преимущества
благодаря системе можно добиться высокой степени точности действий и широкую амплитуду
Преимущества
благодаря системе можно добиться высокой степени точности действий и широкую амплитуду
Преимущества
в первую очередь такая процедура для пациента наиболее безопасна;
исключается вероятность большой
Преимущества
в первую очередь такая процедура для пациента наиболее безопасна;
исключается вероятность большой
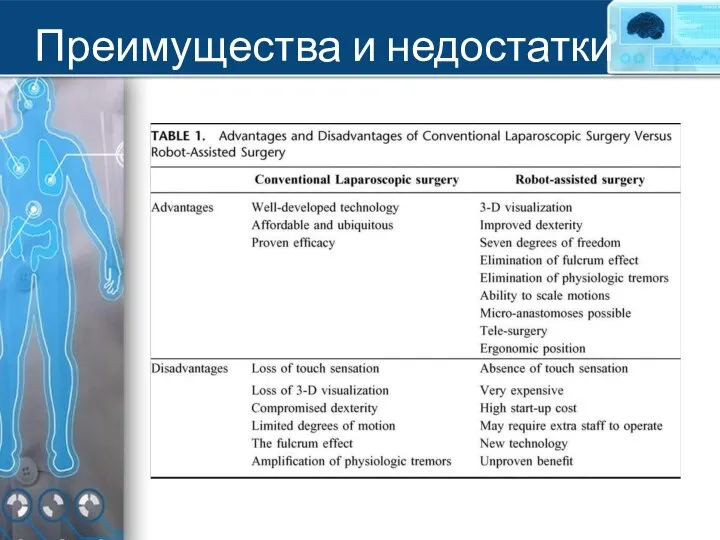
Преимущества и недостатки
Преимущества и недостатки
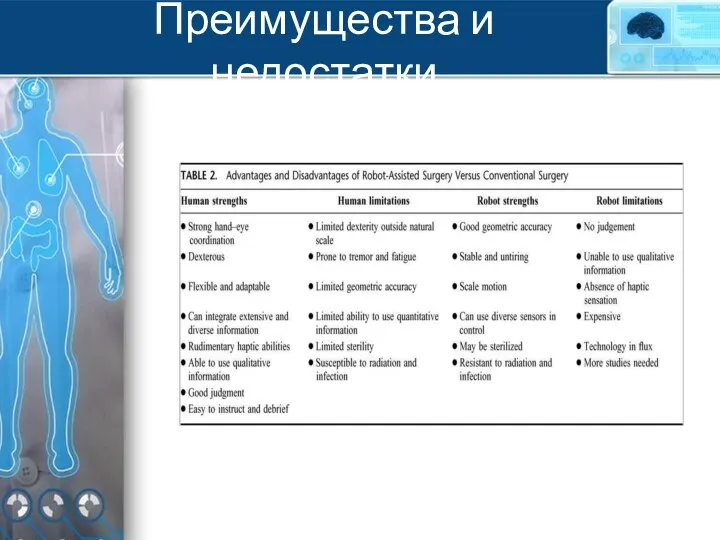
Преимущества и недостатки
Преимущества и недостатки
Недостатки
роботизированная хирургия является новой технологией, поэтому многие операции должны быть переработаны
Недостатки
роботизированная хирургия является новой технологией, поэтому многие операции должны быть переработаны
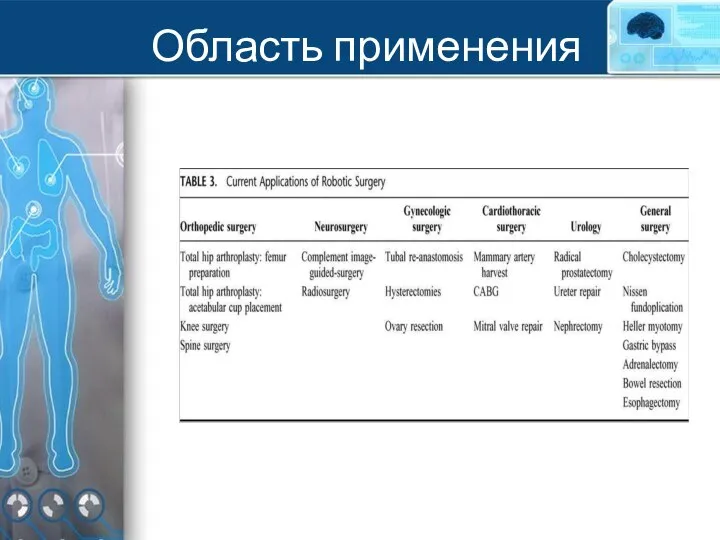
Область применения
Область применения

Хирургия
бариатрическая хирургия
миотомия по Геллеру
холецистэктомия
грыжа
Хирургия
бариатрическая хирургия
миотомия по Геллеру
холецистэктомия
грыжа

Фильмы
Фильмы
Будущее
Чего же можно ожидать от роботохирургии
В будущем? Продолжаются работы посозданию
новых
Будущее
Чего же можно ожидать от роботохирургии
В будущем? Продолжаются работы посозданию
новых
“Руки” робота смогут двигаться в такт
сокращениям, постоянно оставаясь на
одинаковом расстоянии
“Руки” робота смогут двигаться в такт
сокращениям, постоянно оставаясь на
одинаковом расстоянии
 Основные моменты новой пенсионной реформы
Основные моменты новой пенсионной реформы alfavit_pismo_bukv
alfavit_pismo_bukv Рукводство по заполнению отчета по практике
Рукводство по заполнению отчета по практике «Чем младше ребенок, тем более здоровый образ жизни он ведет»
«Чем младше ребенок, тем более здоровый образ жизни он ведет» О дорожных «ловушках»
О дорожных «ловушках» Владимирская область г. Вязники МБДОУ «Центр развития ребёнка – детский сад № 29 «Улыбка»» Цирковая студия «Балаганчик» руковод
Владимирская область г. Вязники МБДОУ «Центр развития ребёнка – детский сад № 29 «Улыбка»» Цирковая студия «Балаганчик» руковод Урок 2. Человек
Урок 2. Человек БИБЛИОТЕЧНЫЙ УРОК: «Периодика для детей»
БИБЛИОТЕЧНЫЙ УРОК: «Периодика для детей» Традиции чаепития в разных странах
Традиции чаепития в разных странах Доменико Андреа Трезини (1670-1734) Выполнил: ученик 11 класса Бесенев А.в. Проверила: Жевлакова О.И. г. Миасс 2013 г.
Доменико Андреа Трезини (1670-1734) Выполнил: ученик 11 класса Бесенев А.в. Проверила: Жевлакова О.И. г. Миасс 2013 г. Микрорайон «Соловьиная роща. Новый квартал»
Микрорайон «Соловьиная роща. Новый квартал» Жанры телевидения
Жанры телевидения Метро. История метро
Метро. История метро Нормативно-правовое регулирование профессиональной медицинской деятельности
Нормативно-правовое регулирование профессиональной медицинской деятельности Мовні норми у власних назвах та рекламних текстах
Мовні норми у власних назвах та рекламних текстах Обмен отдельных аминокислот
Обмен отдельных аминокислот Материалы для родительского собрания в 7 классе
Материалы для родительского собрания в 7 классе Экономическая политика
Экономическая политика Презентация на тему "Cистема подготовки специалистов сердечно-сосудистого профиля, включая симуляционные технологии" - скача
Презентация на тему "Cистема подготовки специалистов сердечно-сосудистого профиля, включая симуляционные технологии" - скача Ведущие парадигмы образования
Ведущие парадигмы образования «Образ русского богатыря»
«Образ русского богатыря» Турецкий язык Türkçe. Урок № 4. Отрицательное и вопросительное предложения. Сочетания аффиксов
Турецкий язык Türkçe. Урок № 4. Отрицательное и вопросительное предложения. Сочетания аффиксов Проблема адаптации учащихся младших классов - презентация для начальной школы_
Проблема адаптации учащихся младших классов - презентация для начальной школы_ Искусство, идущее в ногу со временем В. Маяковский Многообразие культурной революции: искусство плака
Искусство, идущее в ногу со временем В. Маяковский Многообразие культурной революции: искусство плака Презентация на тему "Развитие творческой активности учащихся через инновационные технологии на уроках татарского языка и лите
Презентация на тему "Развитие творческой активности учащихся через инновационные технологии на уроках татарского языка и лите Каменные и армокаменные конструкции
Каменные и армокаменные конструкции Построение автоматов
Построение автоматов Инклюзивный ПрофГид. Содействие профориентации и трудоустройству лиц с ОВЗ и инвалидностью
Инклюзивный ПрофГид. Содействие профориентации и трудоустройству лиц с ОВЗ и инвалидностью