- Т10 РЛС АК.ppt

Содержание
- 2. * РЛС авіаційних ударних і військово-транспортних комплексів. РЛС авіаційних комплексів перехоплення повітряних цілей. РЛС авіаційних розвідувальних
- 3. Контрольні завдання (РЛС АК) Обгрунтуйте співвідношення між дальностями дії двохкоординатної наземної РЛС контролю повітряного простору та
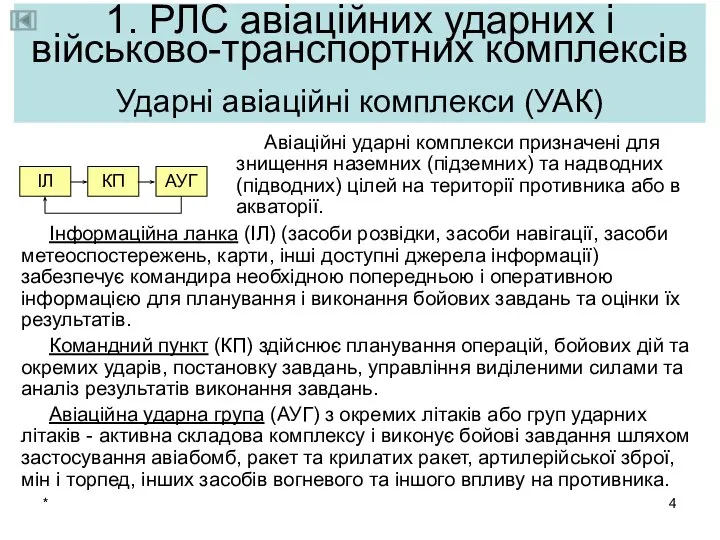
- 4. * 1. РЛС авіаційних ударних і військово-транспортних комплексів Ударні авіаційні комплекси (УАК) Інформаційна ланка (ІЛ) (засоби
- 5. * Особливості бойового застосування УАК Віддаленість об'єктів ударів від місць базування: - на протязі майже всього
- 6. * Етапи виконання бойового завдання Уяснення завдання і підготовка до його виконання (маршрут та профіль полоту,
- 7. Військово-транспортні авіаційні комплекси (ВТАК) підготовки та ведення бойових дій над своєю територією (акваторією), над територією інших
- 8. РЛС ударних і військово-транспортних комплексів Наземні РЛС РЛС дальнього виявлення і контролю повітряного простору (2-х координатні
- 9. Бортовий прицільно-навігаційний комплекс УАК і ВТАК ЛРЗ – літаковий радіолокаційний запитувач ЛРВ – літаковий радіолокаційний відповідач
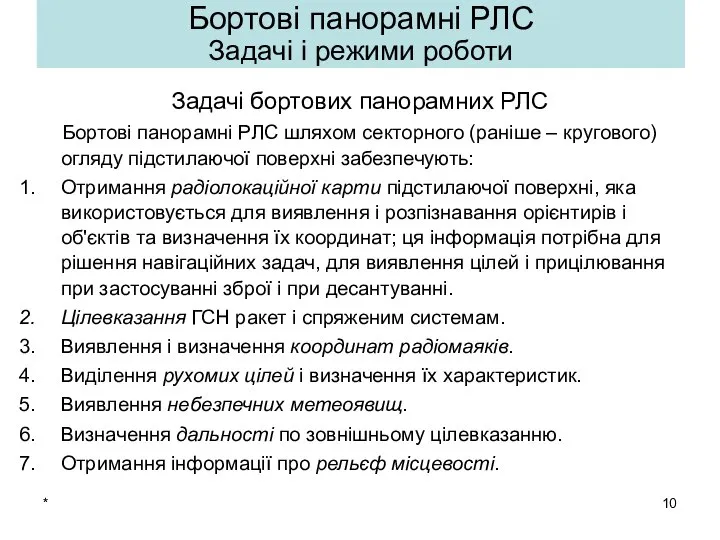
- 10. * Бортові панорамні РЛС Задачі і режими роботи Задачі бортових панорамних РЛС Бортові панорамні РЛС шляхом
- 11. * Режими роботи бортових панорамних РЛС Огляд поверхні у режимах план місцевості (ПМ) у дрібному масштабі
- 12. Особливості побудови і ТТХ ПРЛС Особливості побудови ПРЛС Двохдіапазонність (см та мм діапазони) суттєво покращує ТТХ
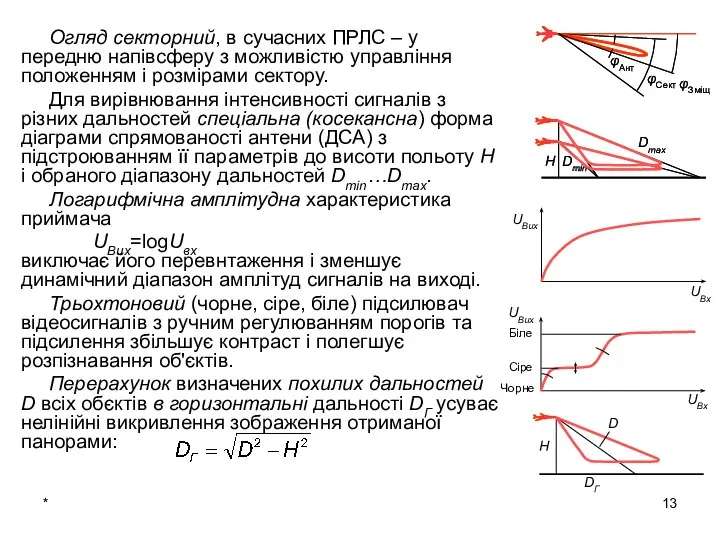
- 13. * Огляд секторний, в сучасних ПРЛС – у передню напівсферу з можливістю управління положенням і розмірами
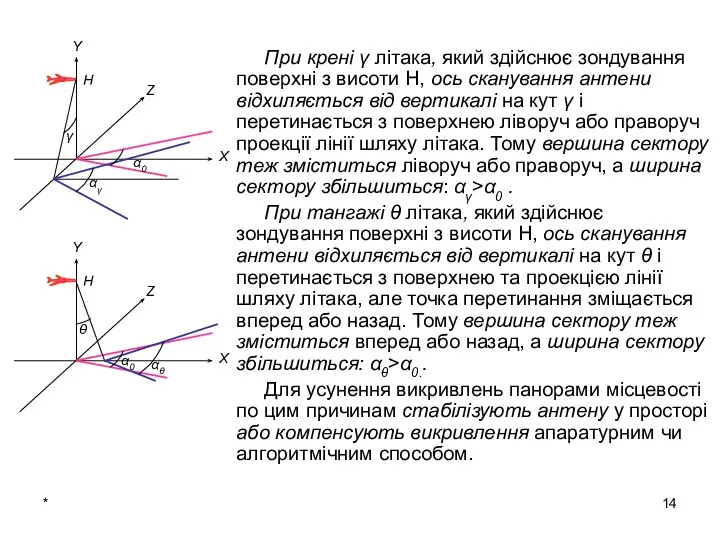
- 14. * При крені γ літака, який здійснює зондування поверхні з висоти Н, ось сканування антени відхиляється
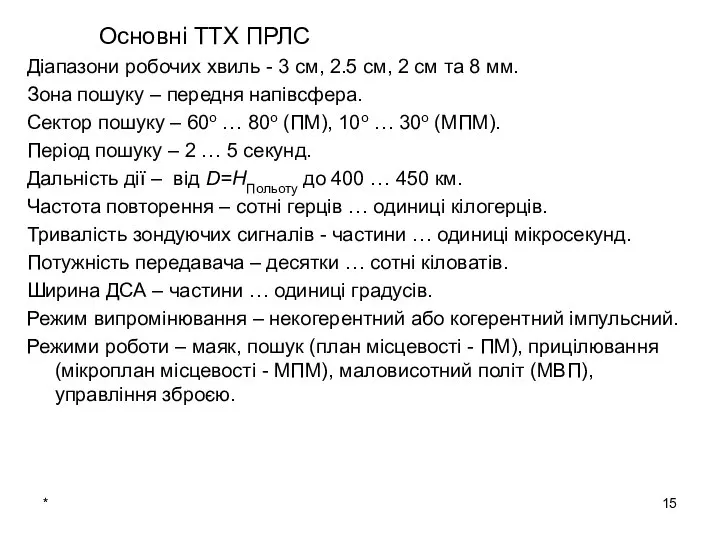
- 15. * Основні ТТХ ПРЛС Діапазони робочих хвиль - 3 см, 2.5 см, 2 см та 8
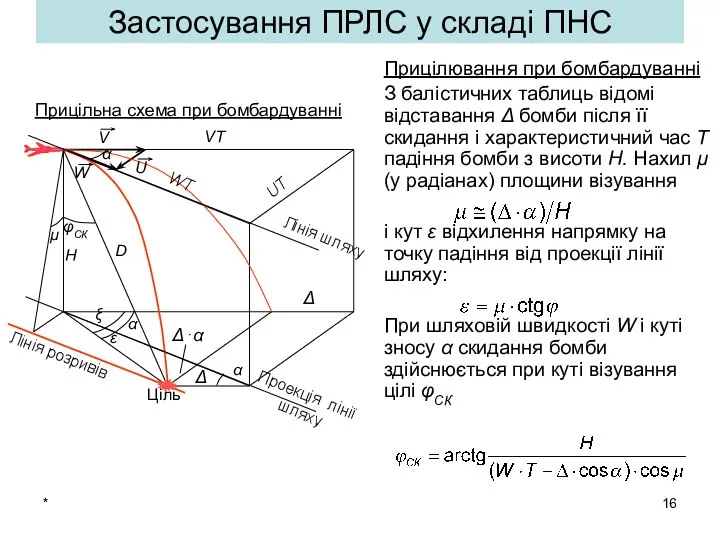
- 16. * Застосування ПРЛС у складі ПНС Прицілювання при бомбардуванні З балістичних таблиць відомі відставання Δ бомби
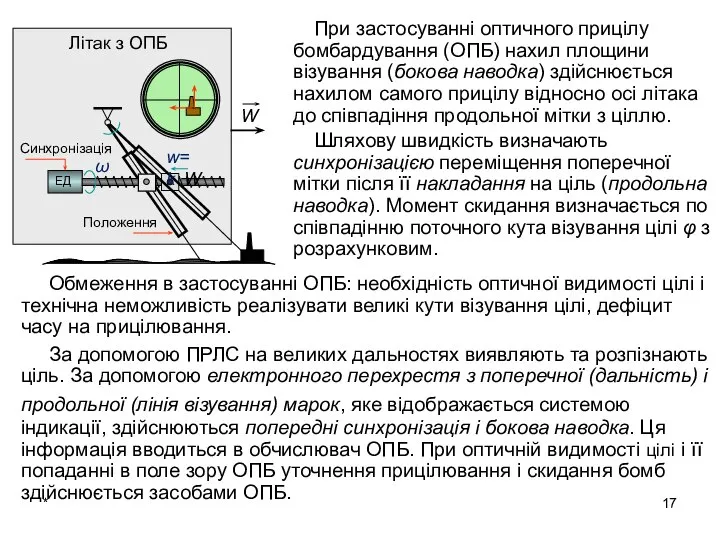
- 17. * При застосуванні оптичного прицілу бомбардування (ОПБ) нахил площини візування (бокова наводка) здійснюється нахилом самого прицілу
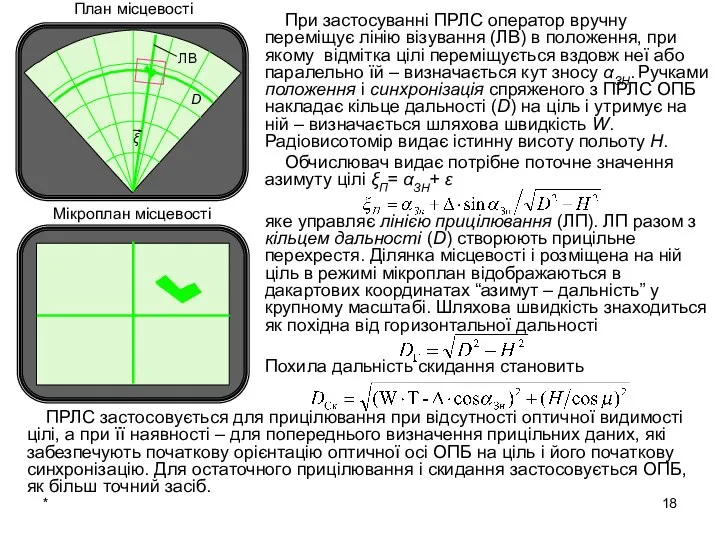
- 18. * При застосуванні ПРЛС оператор вручну переміщує лінію візування (ЛВ) в положення, при якому відмітка цілі
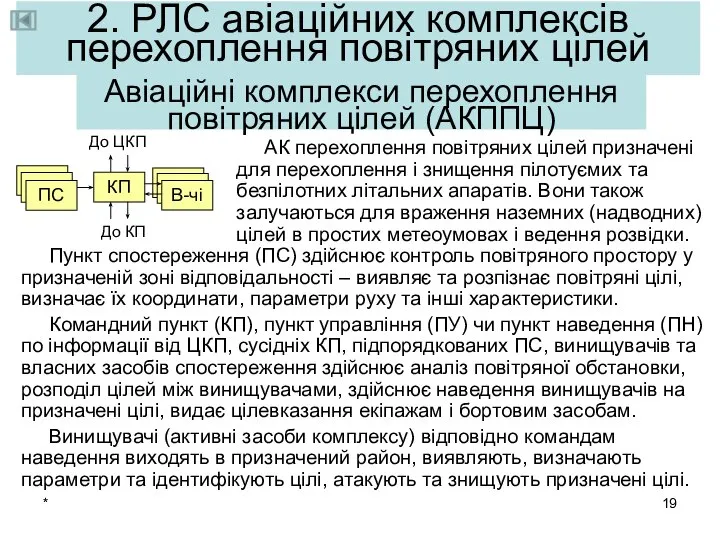
- 19. * Авіаційні комплекси перехоплення повітряних цілей (АКППЦ) 2. РЛС авіаційних комплексів перехоплення повітряних цілей АК перехоплення
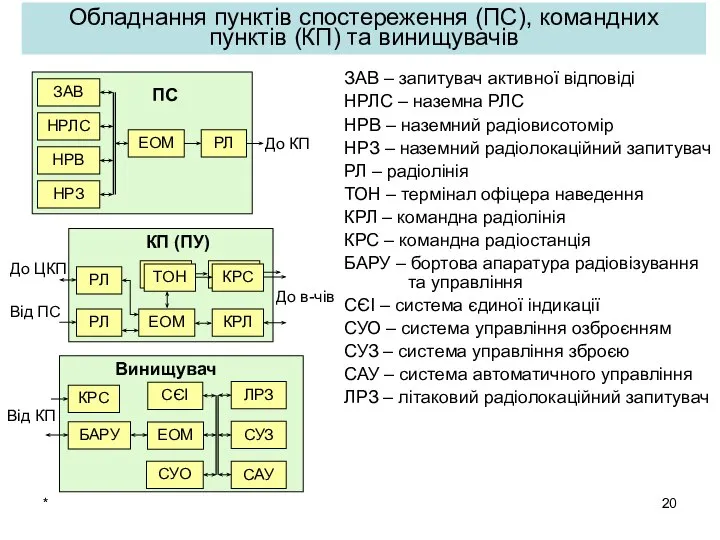
- 20. * ЗАВ – запитувач активної відповіді НРЛС – наземна РЛС НРВ – наземний радіовисотомір НРЗ –
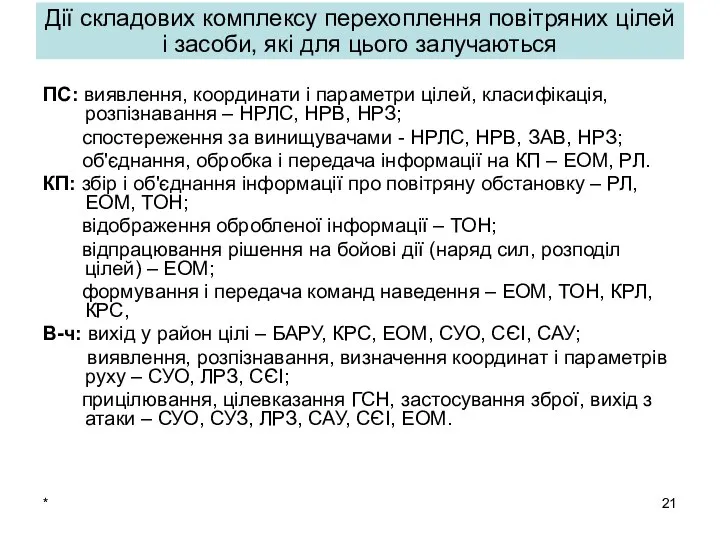
- 21. * Дії складових комплексу перехоплення повітряних цілей і засоби, які для цього залучаються ПС: виявлення, координати
- 22. Наведення винищувачів Мета наведення – виведення винищувача в район призначеної для атаки цілі в положення, при
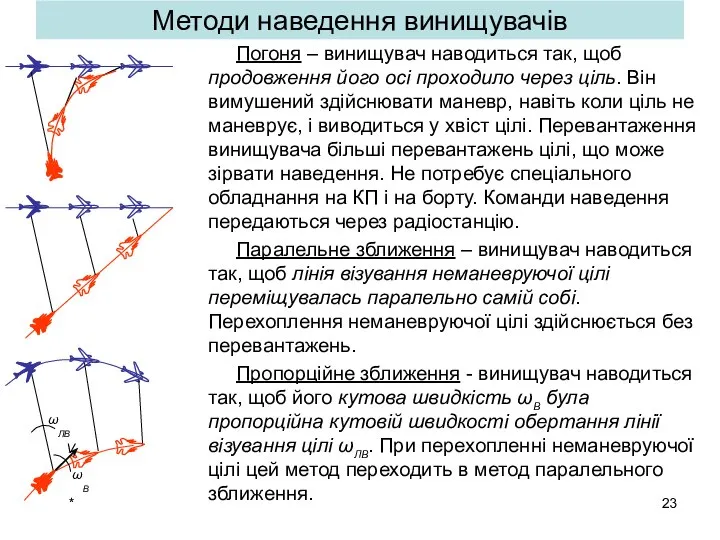
- 23. * Методи наведення винищувачів Погоня – винищувач наводиться так, щоб продовження його осі проходило через ціль.
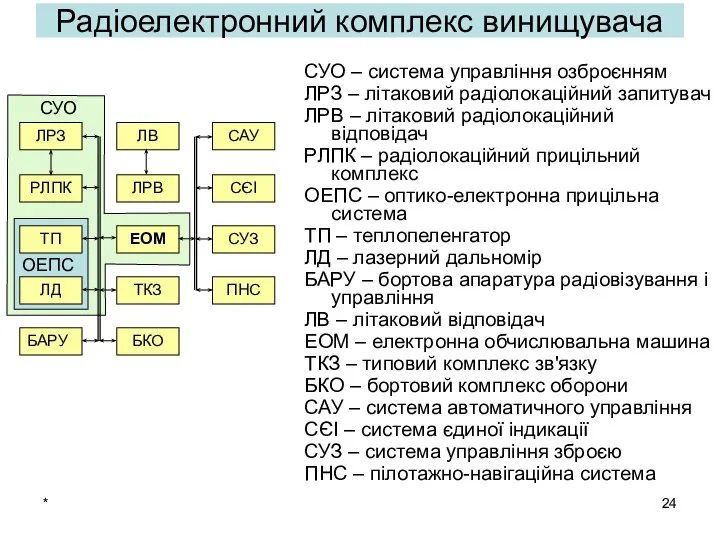
- 24. * Радіоелектронний комплекс винищувача СУО – система управління озброєнням ЛРЗ – літаковий радіолокаційний запитувач ЛРВ –
- 25. * Функції складових комплексу винищувача Автономні джерела інформації про обстановку – ЛРЗ, РЛПК, ТП, ЛД, БКО.
- 26. * Радіолокаційний прицільний комплекс (РЛПК) і оптико-електронна прицільна система (ОЕПС) забезпечують перехоплення і знищення повітряних цілей
- 27. Радіолокаційний прицільний комплекс (РЛПК) Склад РЛПК Імпульсно-доплерівська трьохкоординатна РЛС контролю повітряного простору, прицілювання та управління зброєю.
- 28. * Задачі додаткові Отримання радіолокаційної карти місцевості. Пошук, виявлення, визначення координат і параметрів руху наземних (надводних)
- 29. Особливості побудови РЛПК Режим випромінювання: а) при огляді повітряного простору і підстилаючої поверхні – імпульсно-доплерівський з
- 30. Поточна інформація про крен (γ) антени і кути відхилення по горизонталі (φГ) і вертикалі (φВ) видається
- 31. * В контурах управління слідкуючих систем обробка помилок супроводження здійснюється α-β-фільтрами. Управління скануванням антени з електромеханічним
- 32. Частотна селекція здійснюється в кожному каналі дальності шляхом виділення одної спектральної складової вузькосмуговими доплерівськими фільтрами, які
- 33. * Режими роботи РЛПК 1. Огляд повітряного простору (багатоцільовий режим – БЦР). При веденні дальнього ракетного
- 34. * 5. Підсвітлювання цілі. Застосовується для забезпечення роботи РГС ракет напівактивного типу. 6. Радіокорекція. Застосовується при
- 35. * Взаємодія РЛС зі складовими РЛПК і СУЗ Взаємодія з ЕОМ: синхронізація, узгодження машинного і апаратурних
- 36. * Взаємодія зі зброєю і системою управління зброєю: цілевказання; управління вибором, підготовкою і застосуванням зброї; підсвітлювання
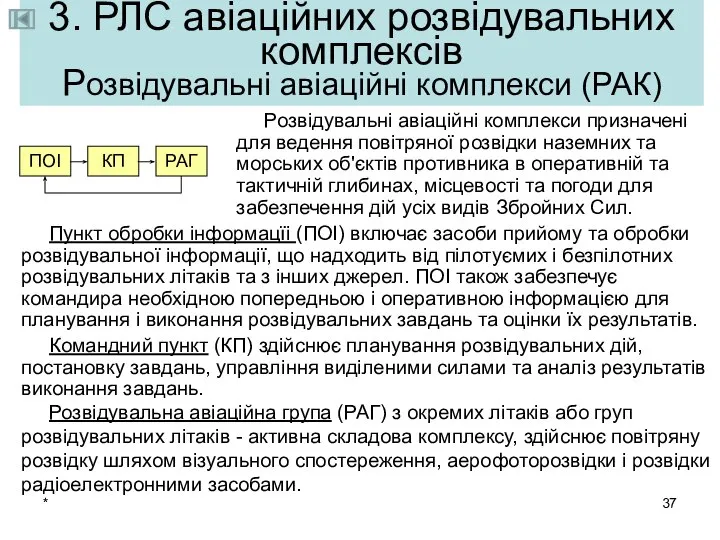
- 37. * 3. РЛС авіаційних розвідувальних комплексів Розвідувальні авіаційні комплекси (РАК) Пункт обробки інформацїі (ПОІ) включає засоби
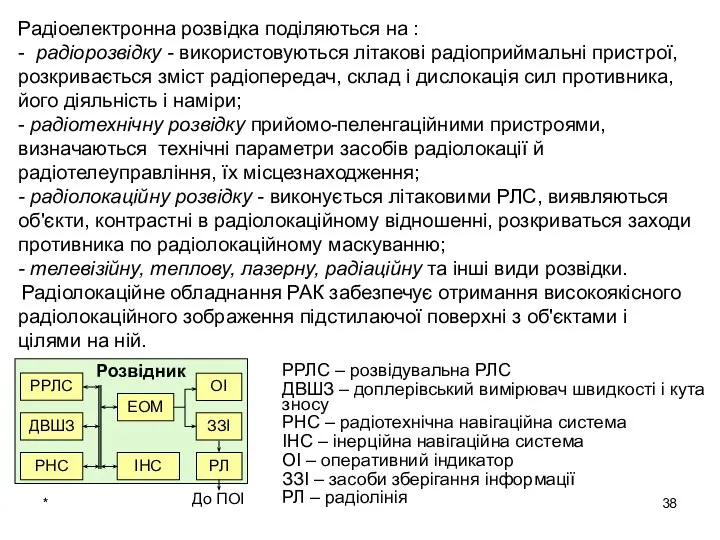
- 38. * РРЛС – розвідувальна РЛС ДВШЗ – доплерівський вимірювач швидкості і кута зносу РНС – радіотехнічна
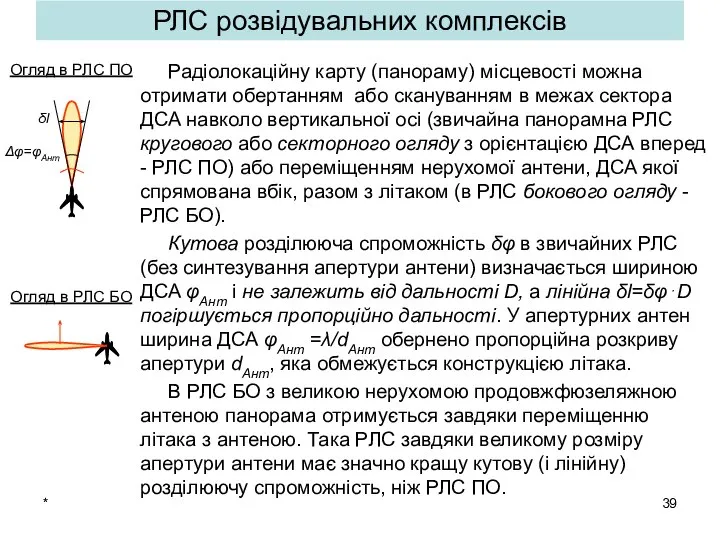
- 39. * РЛС розвідувальних комплексів Радіолокаційну карту (панораму) місцевості можна отримати обертанням або скануванням в межах сектора
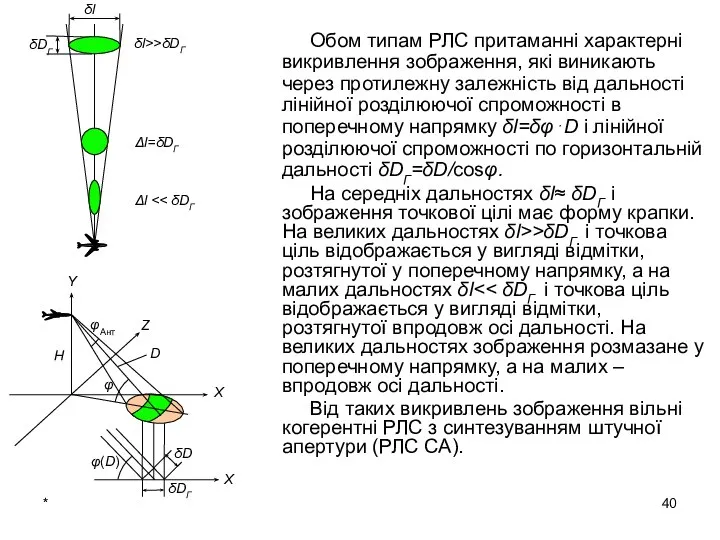
- 40. * Обом типам РЛС притаманні характерні викривлення зображення, які виникають через протилежну залежність від дальності лінійної
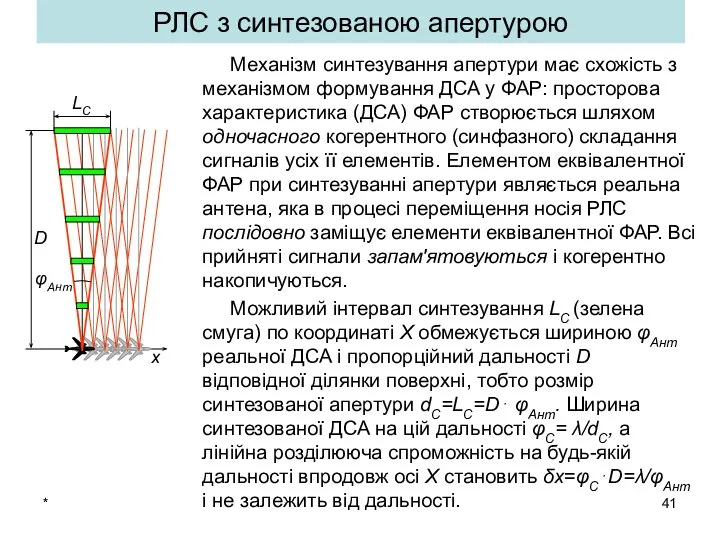
- 41. * РЛС з синтезованою апертурою Механізм синтезування апертури має схожість з механізмом формування ДСА у ФАР:
- 42. * З урахуванням того, що поняття ДСА характеризує просторові характеристики антени при її роботі тільки на
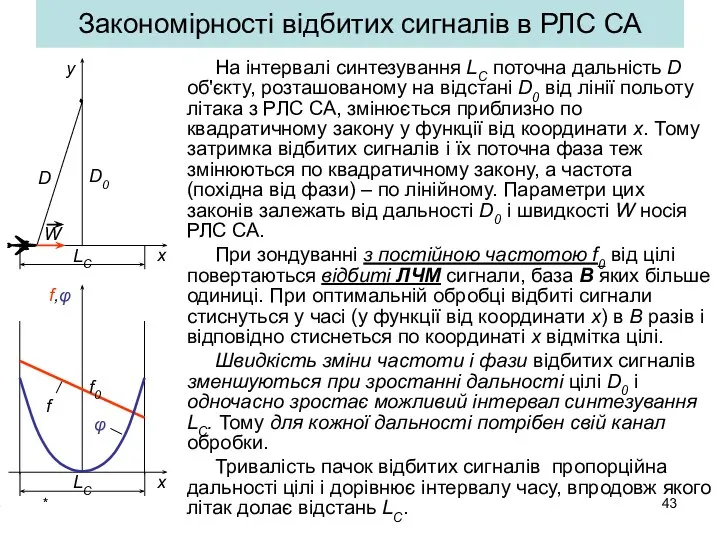
- 43. * Закономірності відбитих сигналів в РЛС СА На інтервалі синтезування LC поточна дальність D об'єкту, розташованому
- 44. * Обробка сигналів в РЛС СА Складність реалізації РЛС СА пов'язана не тільки з необхідністю використання
- 45. * Особливості синтезування при імпульсному випромінюванні Синтезована ДСА при безперервному випромінюванні відповідає ДСА реальної антени з
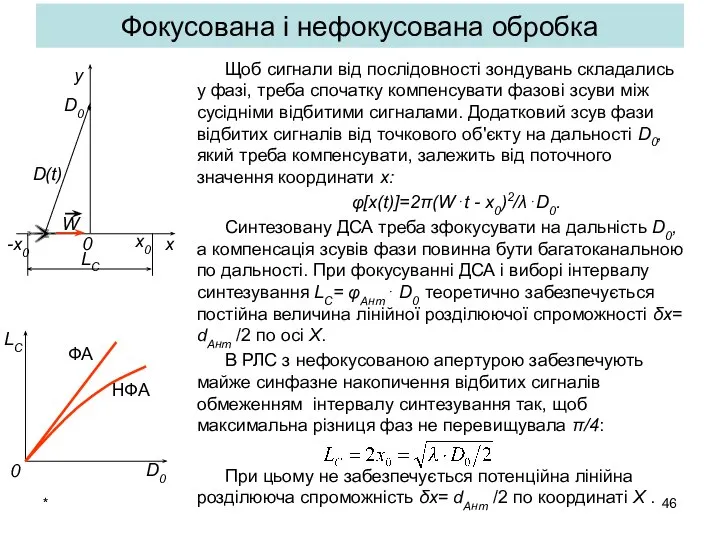
- 46. * Фокусована і нефокусована обробка Щоб сигнали від послідовності зондувань складались у фазі, треба спочатку компенсувати
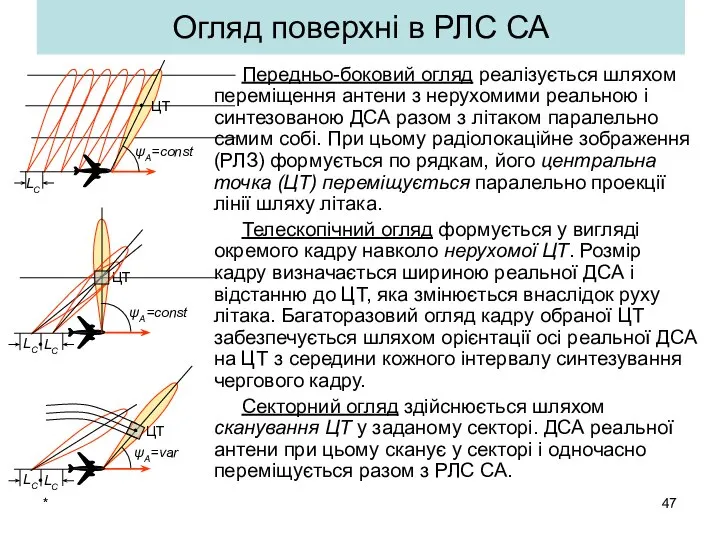
- 47. * Огляд поверхні в РЛС СА Передньо-боковий огляд реалізується шляхом переміщення антени з нерухомими реальною і
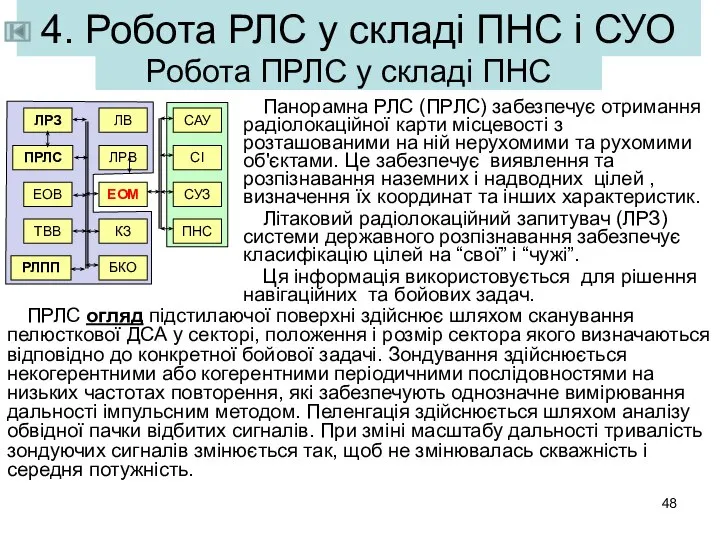
- 48. 4. Робота РЛС у складі ПНС і СУО Панорамна РЛС (ПРЛС) забезпечує отримання радіолокаційної карти місцевості
- 49. * При огляді РЛ карта відображається системою індикації (СІ) в режимі ПМ у полярних координатах “азимут-дальність”.
- 50. Синхронізатор ПРЛС з упередженням відносно ІЗП для власного передавача видає в літаковий радіолокаційний запитувач (ЛРЗ) імпульси
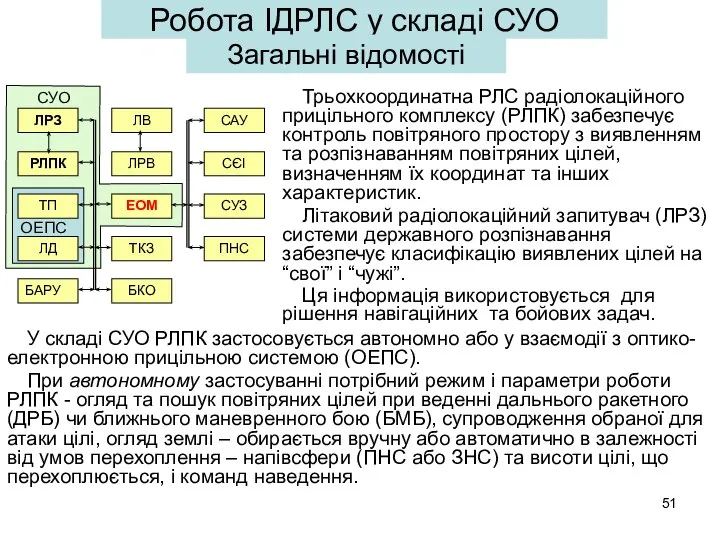
- 51. Робота ІДРЛС у складі СУО Трьохкоординатна РЛС радіолокаційного прицільного комплексу (РЛПК) забезпечує контроль повітряного простору з
- 52. При взаємодії з ОЕПС в залежності від умов перехоплення і типу обраної зброї РЛПК призначається ведучим
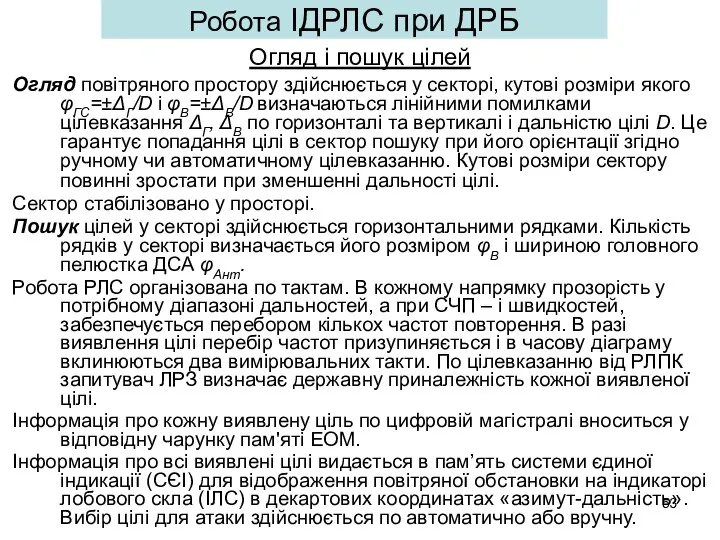
- 53. Огляд і пошук цілей Огляд повітряного простору здійснюється у секторі, кутові розміри якого φГС=±ΔГ/D і φВ=±ΔВ/D
- 54. Супроводження цілі По команді ЗАХВАТ припиняється огляд сектору і по цілевказанню з відповідної чарунки пам'яті ЕОМ
- 55. Підсвітлювання цілі здійснюється при застосуванні ракет з РГС шляхом вклинювання тактів підсвітлювання і радіокорекції між тактами
- 56. Ближній маневренний бій (БМБ) ведеться швидкотічно при візуальному контакті з ціллю. Тому замість огляду повітряного простору
- 57. * Робота запитувача ЛРЗ винищувача аналогічна роботі ЛРЗ ударного літака (слайд № 50). Особливість у тому,
- 58. * Питання для самоконтролю 1. Характеристика основних типів авіаційних комплексів. 2. Застосування РЛС у складі основних
- 60. Скачать презентацию
*
РЛС авіаційних ударних і військово-транспортних комплексів.
РЛС авіаційних комплексів перехоплення повітряних цілей.
РЛС
*
РЛС авіаційних ударних і військово-транспортних комплексів.
РЛС авіаційних комплексів перехоплення повітряних цілей.
РЛС
Контрольні завдання (РЛС АК)
Обгрунтуйте співвідношення між дальностями дії двохкоординатної наземної РЛС
Контрольні завдання (РЛС АК)
Обгрунтуйте співвідношення між дальностями дії двохкоординатної наземної РЛС
*
1. РЛС авіаційних ударних і військово-транспортних комплексів
Ударні авіаційні комплекси (УАК)
Інформаційна ланка
*
1. РЛС авіаційних ударних і військово-транспортних комплексів
Ударні авіаційні комплекси (УАК)
Інформаційна ланка
*
Особливості бойового застосування УАК
Віддаленість об'єктів ударів від місць базування:
-
*
Особливості бойового застосування УАК
Віддаленість об'єктів ударів від місць базування:
-
*
Етапи виконання бойового завдання
Уяснення завдання і підготовка до його виконання (маршрут
*
Етапи виконання бойового завдання
Уяснення завдання і підготовка до його виконання (маршрут
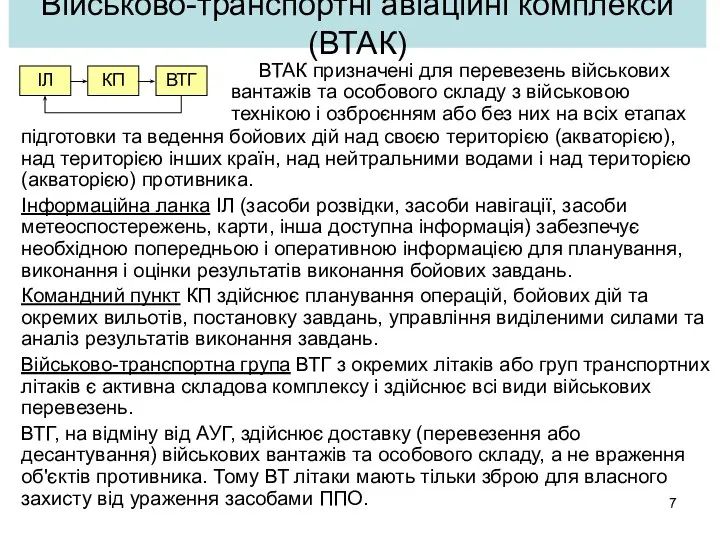
Військово-транспортні авіаційні комплекси (ВТАК)
підготовки та ведення бойових дій над своєю територією
Військово-транспортні авіаційні комплекси (ВТАК)
підготовки та ведення бойових дій над своєю територією
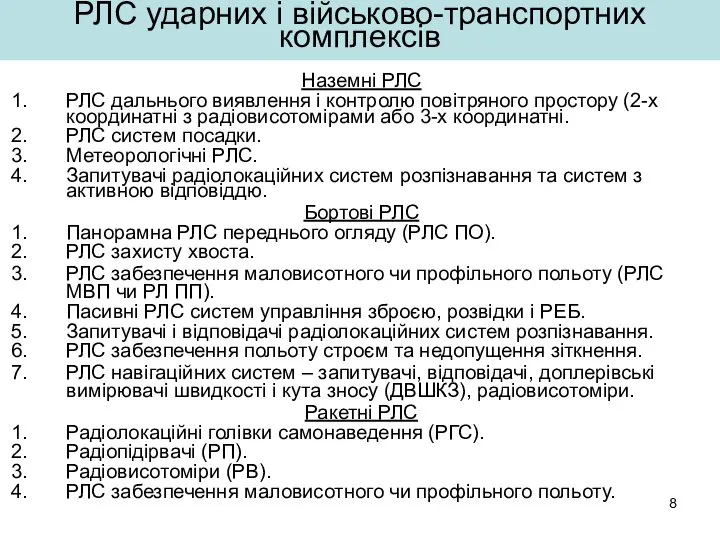
РЛС ударних і військово-транспортних комплексів
Наземні РЛС
РЛС дальнього виявлення і контролю
РЛС ударних і військово-транспортних комплексів
Наземні РЛС
РЛС дальнього виявлення і контролю

Бортовий прицільно-навігаційний комплекс УАК і ВТАК
ЛРЗ – літаковий радіолокаційний запитувач
ЛРВ
Бортовий прицільно-навігаційний комплекс УАК і ВТАК
ЛРЗ – літаковий радіолокаційний запитувач
ЛРВ
*
Бортові панорамні РЛС
Задачі і режими роботи
Задачі бортових панорамних РЛС
Бортові панорамні РЛС
*
Бортові панорамні РЛС
Задачі і режими роботи
Задачі бортових панорамних РЛС
Бортові панорамні РЛС
*
Режими роботи бортових панорамних РЛС
Огляд поверхні у режимах план місцевості (ПМ)
*
Режими роботи бортових панорамних РЛС
Огляд поверхні у режимах план місцевості (ПМ)
Особливості побудови і ТТХ ПРЛС
Особливості побудови ПРЛС
Двохдіапазонність (см та мм
Особливості побудови і ТТХ ПРЛС
Особливості побудови ПРЛС
Двохдіапазонність (см та мм
*
Огляд секторний, в сучасних ПРЛС – у передню напівсферу з можливістю
*
Огляд секторний, в сучасних ПРЛС – у передню напівсферу з можливістю
*
При крені γ літака, який здійснює зондування поверхні з висоти Н,
*
При крені γ літака, який здійснює зондування поверхні з висоти Н,
*
Основні ТТХ ПРЛС
Діапазони робочих хвиль - 3 см, 2.5 см, 2
*
Основні ТТХ ПРЛС
Діапазони робочих хвиль - 3 см, 2.5 см, 2
*
Застосування ПРЛС у складі ПНС
Прицілювання при бомбардуванні
З балістичних таблиць відомі відставання
*
Застосування ПРЛС у складі ПНС
Прицілювання при бомбардуванні
З балістичних таблиць відомі відставання
*
При застосуванні оптичного прицілу бомбардування (ОПБ) нахил площини візування (бокова наводка)
*
При застосуванні оптичного прицілу бомбардування (ОПБ) нахил площини візування (бокова наводка)
*
При застосуванні ПРЛС оператор вручну переміщує лінію візування (ЛВ) в
*
При застосуванні ПРЛС оператор вручну переміщує лінію візування (ЛВ) в
*
Авіаційні комплекси перехоплення повітряних цілей (АКППЦ)
2. РЛС авіаційних комплексів перехоплення повітряних
*
Авіаційні комплекси перехоплення повітряних цілей (АКППЦ)
2. РЛС авіаційних комплексів перехоплення повітряних
*
ЗАВ – запитувач активної відповіді
НРЛС – наземна РЛС
НРВ – наземний радіовисотомір
НРЗ
*
ЗАВ – запитувач активної відповіді
НРЛС – наземна РЛС
НРВ – наземний радіовисотомір
НРЗ
*
Дії складових комплексу перехоплення повітряних цілей і засоби, які для цього
*
Дії складових комплексу перехоплення повітряних цілей і засоби, які для цього
Наведення винищувачів
Мета наведення – виведення винищувача в район призначеної для атаки
Наведення винищувачів
Мета наведення – виведення винищувача в район призначеної для атаки
*
Методи наведення винищувачів
Погоня – винищувач наводиться так, щоб продовження його осі
*
Методи наведення винищувачів
Погоня – винищувач наводиться так, щоб продовження його осі
*
Радіоелектронний комплекс винищувача
СУО – система управління озброєнням
ЛРЗ – літаковий радіолокаційний запитувач
ЛРВ
*
Радіоелектронний комплекс винищувача
СУО – система управління озброєнням
ЛРЗ – літаковий радіолокаційний запитувач
ЛРВ
*
Функції складових комплексу винищувача
Автономні джерела інформації про обстановку – ЛРЗ, РЛПК,
*
Функції складових комплексу винищувача
Автономні джерела інформації про обстановку – ЛРЗ, РЛПК,
*
Радіолокаційний прицільний комплекс (РЛПК) і оптико-електронна прицільна система (ОЕПС) забезпечують перехоплення
*
Радіолокаційний прицільний комплекс (РЛПК) і оптико-електронна прицільна система (ОЕПС) забезпечують перехоплення
Радіолокаційний прицільний комплекс (РЛПК)
Склад РЛПК
Імпульсно-доплерівська трьохкоординатна РЛС контролю повітряного простору, прицілювання
Радіолокаційний прицільний комплекс (РЛПК)
Склад РЛПК
Імпульсно-доплерівська трьохкоординатна РЛС контролю повітряного простору, прицілювання
*
Задачі додаткові
Отримання радіолокаційної карти місцевості.
Пошук, виявлення, визначення координат і параметрів руху
*
Задачі додаткові
Отримання радіолокаційної карти місцевості.
Пошук, виявлення, визначення координат і параметрів руху
Особливості побудови РЛПК
Режим випромінювання:
а) при огляді повітряного простору і підстилаючої
Особливості побудови РЛПК
Режим випромінювання:
а) при огляді повітряного простору і підстилаючої
Поточна інформація про крен (γ) антени і кути відхилення по горизонталі
Поточна інформація про крен (γ) антени і кути відхилення по горизонталі
*
В контурах управління слідкуючих систем обробка помилок супроводження здійснюється α-β-фільтрами.
Управління скануванням
*
В контурах управління слідкуючих систем обробка помилок супроводження здійснюється α-β-фільтрами.
Управління скануванням
Частотна селекція здійснюється в кожному каналі дальності шляхом виділення одної спектральної
Частотна селекція здійснюється в кожному каналі дальності шляхом виділення одної спектральної
*
Режими роботи РЛПК
1. Огляд повітряного простору (багатоцільовий режим – БЦР).
При веденні
*
Режими роботи РЛПК
1. Огляд повітряного простору (багатоцільовий режим – БЦР).
При веденні
*
5. Підсвітлювання цілі.
Застосовується для забезпечення роботи РГС ракет напівактивного типу.
6. Радіокорекція.
Застосовується
*
5. Підсвітлювання цілі.
Застосовується для забезпечення роботи РГС ракет напівактивного типу.
6. Радіокорекція.
Застосовується
*
Взаємодія РЛС зі складовими РЛПК і СУЗ
Взаємодія з ЕОМ:
синхронізація, узгодження
*
Взаємодія РЛС зі складовими РЛПК і СУЗ
Взаємодія з ЕОМ:
синхронізація, узгодження
*
Взаємодія зі зброєю і системою управління зброєю:
цілевказання;
управління вибором, підготовкою і застосуванням
*
Взаємодія зі зброєю і системою управління зброєю:
цілевказання;
управління вибором, підготовкою і застосуванням
*
3. РЛС авіаційних розвідувальних комплексів
Розвідувальні авіаційні комплекси (РАК)
Пункт обробки інформацїі (ПОІ)
*
3. РЛС авіаційних розвідувальних комплексів
Розвідувальні авіаційні комплекси (РАК)
Пункт обробки інформацїі (ПОІ)
*
РРЛС – розвідувальна РЛС
ДВШЗ – доплерівський вимірювач швидкості і кута
*
РРЛС – розвідувальна РЛС
ДВШЗ – доплерівський вимірювач швидкості і кута
*
РЛС розвідувальних комплексів
Радіолокаційну карту (панораму) місцевості можна отримати обертанням або скануванням
*
РЛС розвідувальних комплексів
Радіолокаційну карту (панораму) місцевості можна отримати обертанням або скануванням
*
Обом типам РЛС притаманні характерні викривлення зображення, які виникають через протилежну
*
Обом типам РЛС притаманні характерні викривлення зображення, які виникають через протилежну
*
РЛС з синтезованою апертурою
Механізм синтезування апертури має схожість з механізмом формування
*
РЛС з синтезованою апертурою
Механізм синтезування апертури має схожість з механізмом формування
*
З урахуванням того, що поняття ДСА характеризує просторові характеристики антени при
*
З урахуванням того, що поняття ДСА характеризує просторові характеристики антени при
*
Закономірності відбитих сигналів в РЛС СА
На інтервалі синтезування LC поточна дальність
*
Закономірності відбитих сигналів в РЛС СА
На інтервалі синтезування LC поточна дальність
*
Обробка сигналів в РЛС СА
Складність реалізації РЛС СА пов'язана не тільки
*
Обробка сигналів в РЛС СА
Складність реалізації РЛС СА пов'язана не тільки
*
Особливості синтезування при імпульсному випромінюванні
Синтезована ДСА при безперервному випромінюванні відповідає ДСА
*
Особливості синтезування при імпульсному випромінюванні
Синтезована ДСА при безперервному випромінюванні відповідає ДСА
*
Фокусована і нефокусована обробка
Щоб сигнали від послідовності зондувань складались у фазі,
*
Фокусована і нефокусована обробка
Щоб сигнали від послідовності зондувань складались у фазі,
*
Огляд поверхні в РЛС СА
Передньо-боковий огляд реалізується шляхом переміщення антени з
*
Огляд поверхні в РЛС СА
Передньо-боковий огляд реалізується шляхом переміщення антени з
4. Робота РЛС у складі ПНС і СУО
Панорамна РЛС (ПРЛС) забезпечує
4. Робота РЛС у складі ПНС і СУО
Панорамна РЛС (ПРЛС) забезпечує
*
При огляді РЛ карта відображається системою індикації (СІ) в режимі ПМ
*
При огляді РЛ карта відображається системою індикації (СІ) в режимі ПМ
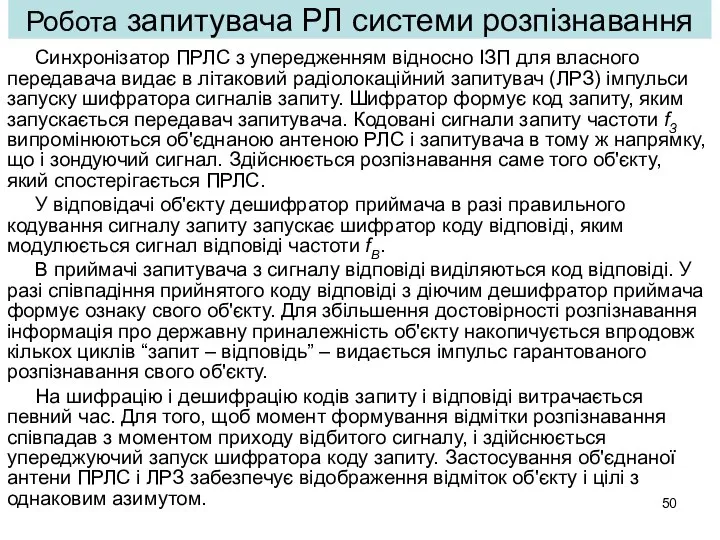
Синхронізатор ПРЛС з упередженням відносно ІЗП для власного передавача видає в
Синхронізатор ПРЛС з упередженням відносно ІЗП для власного передавача видає в
Робота ІДРЛС у складі СУО
Трьохкоординатна РЛС радіолокаційного прицільного комплексу (РЛПК) забезпечує
Робота ІДРЛС у складі СУО
Трьохкоординатна РЛС радіолокаційного прицільного комплексу (РЛПК) забезпечує
При взаємодії з ОЕПС в залежності від умов перехоплення і типу
При взаємодії з ОЕПС в залежності від умов перехоплення і типу
Огляд і пошук цілей
Огляд повітряного простору здійснюється у секторі, кутові розміри
Огляд і пошук цілей
Огляд повітряного простору здійснюється у секторі, кутові розміри
Супроводження цілі
По команді ЗАХВАТ припиняється огляд сектору і по цілевказанню з
Супроводження цілі
По команді ЗАХВАТ припиняється огляд сектору і по цілевказанню з
Підсвітлювання цілі здійснюється при застосуванні ракет з РГС шляхом вклинювання тактів
Підсвітлювання цілі здійснюється при застосуванні ракет з РГС шляхом вклинювання тактів
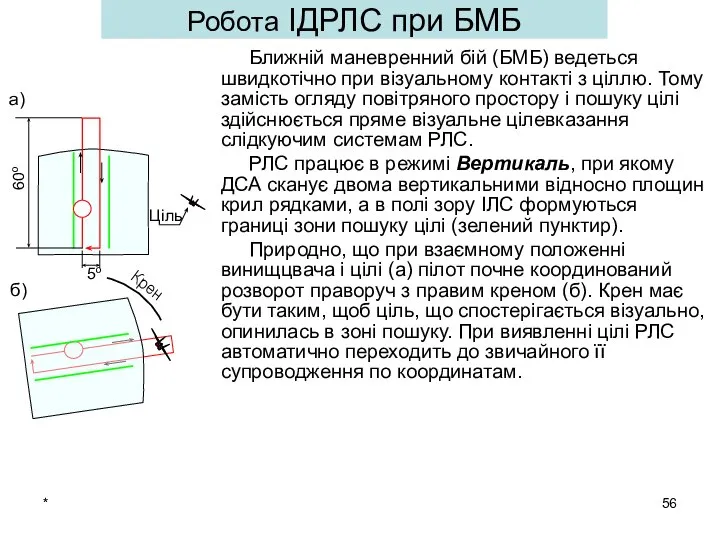
Ближній маневренний бій (БМБ) ведеться швидкотічно при візуальному контакті з ціллю.
Ближній маневренний бій (БМБ) ведеться швидкотічно при візуальному контакті з ціллю.
*
Робота запитувача ЛРЗ винищувача аналогічна роботі ЛРЗ ударного літака (слайд №
*
Робота запитувача ЛРЗ винищувача аналогічна роботі ЛРЗ ударного літака (слайд №
*
Питання для самоконтролю
1. Характеристика основних типів авіаційних комплексів.
2. Застосування РЛС
*
Питання для самоконтролю
1. Характеристика основних типів авіаційних комплексів.
2. Застосування РЛС
 Powołanie zakonne
Powołanie zakonne CCNA RS 6.0 Bridging. Шаблон
CCNA RS 6.0 Bridging. Шаблон «Букет роз» (материал-пластилин) Урок художественного труда 3 класс
«Букет роз» (материал-пластилин) Урок художественного труда 3 класс Роль СМИ в политической жизни
Роль СМИ в политической жизни Отчет по учебной практике. Радарный уровнемер Saab TankRadar RTG 3920
Отчет по учебной практике. Радарный уровнемер Saab TankRadar RTG 3920 Осушение слабопроницаемых пород
Осушение слабопроницаемых пород Пакет Яровой
Пакет Яровой Сертификация сыра
Сертификация сыра Презентация Понятие законности
Презентация Понятие законности Велогонка Пермь - "Демидково"
Велогонка Пермь - "Демидково" Систематизация и классификация знаний в судебной экспертизе
Систематизация и классификация знаний в судебной экспертизе Приметы и суеверия Германии и России
Приметы и суеверия Германии и России Жизнь и служение Иоанна Кронштадтского
Жизнь и служение Иоанна Кронштадтского Презентацию подготовила учитель МБОУ «Верх-Обская СОШ им. М. С. Евдокимова» Ларионова Е.А.
Презентацию подготовила учитель МБОУ «Верх-Обская СОШ им. М. С. Евдокимова» Ларионова Е.А. Основные виды сырья для производства строительных материалов. Лекция 4
Основные виды сырья для производства строительных материалов. Лекция 4 Презентация "Цены" - скачать презентации по Экономике
Презентация "Цены" - скачать презентации по Экономике Разработка стратегических установок организации. Тема 3
Разработка стратегических установок организации. Тема 3 Глава 21. Консультирование по вопросам всеобщего управления качеством
Глава 21. Консультирование по вопросам всеобщего управления качеством Програми з графічним інтерфейсом. Робота з проектами у середовищі Lazarus
Програми з графічним інтерфейсом. Робота з проектами у середовищі Lazarus наложение ареста на почтово-телеграфные отправления, их осмотр и выемка
наложение ареста на почтово-телеграфные отправления, их осмотр и выемка Функции политики
Функции политики Страхування життя
Страхування життя Программирование в EV3. Проезды и повороты
Программирование в EV3. Проезды и повороты Brand: Do It Yourself
Brand: Do It Yourself  По большому счету, БРЕНДИНГ решает все! HR-бренд или бренд работодателя это: Образ, имидж вашей компании как хорошего места работы в
По большому счету, БРЕНДИНГ решает все! HR-бренд или бренд работодателя это: Образ, имидж вашей компании как хорошего места работы в  «Скажи мне - и я забуду, Покажи мне - и я запомню, Дай сделать - и я пойму».
«Скажи мне - и я забуду, Покажи мне - и я запомню, Дай сделать - и я пойму». Химия элементов D-ЭЛЕМЕНТы 7-8
Химия элементов D-ЭЛЕМЕНТы 7-8  Методы исследований
Методы исследований