- Устройства электропривода для РЭУ и ТКС

Содержание
- 2. Лекция №9 Тема лекции: Устройства электропривода для РЭУ и ТКС
- 3. Учебные вопросы 1. Назначение, структура и элементы автоматизированного электропривода. 2. Классификация электроприводов. 3. Регулирование скорости электропривода
- 4. Литература 1. Немцов М.В. Электротехника и электроника: Учебник для вузов. – М.: Высш. шк. 2007, с.511-521.
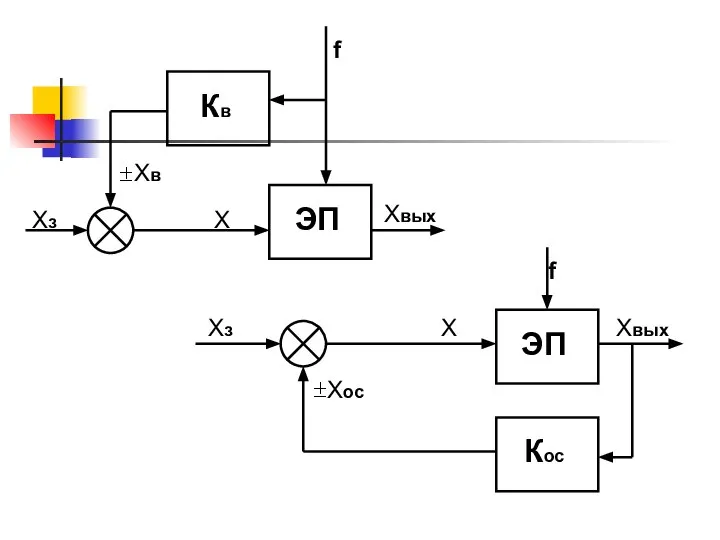
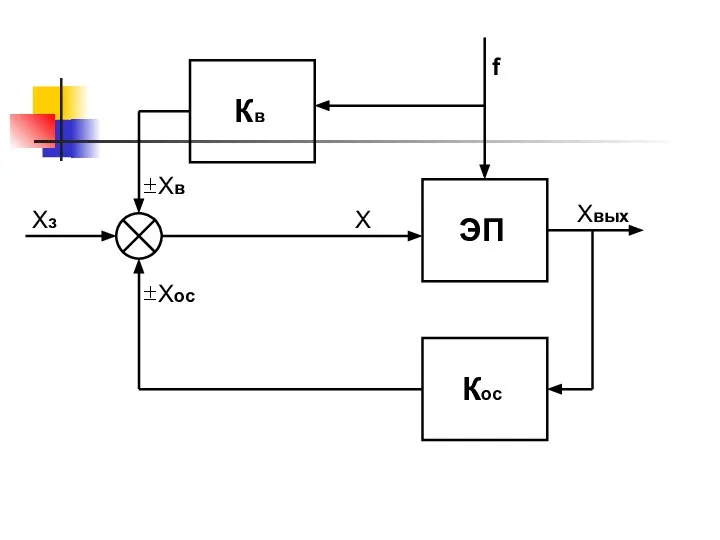
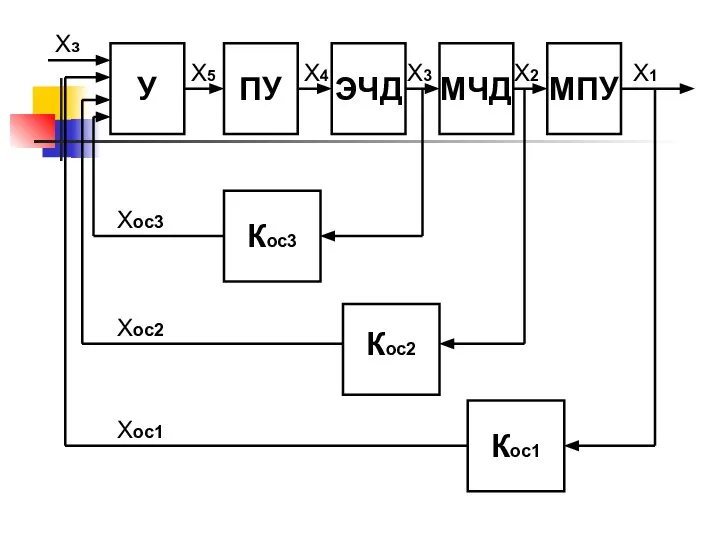
- 5. Типовая структурная схема автоматизированного ЭП
- 6. Функции автоматизированного ЭП 1. Подведение к ИО механической энергии, за счёт которой совершается их движение .
- 7. Классификация ЭП по виду движения
- 8. Классификация АЭП по степени автоматизации
- 9. Способы регулирования угловой и линейной скорости ИО 1) применение МПУ с регулируемым передаточным числом i или
- 10. Регулирование скорости характеризуется следующими основными показателями: диапазоном регулирования, т. е. отношением максимальной и минимальной скоростей при
- 15. Скачать презентацию
Лекция №9
Тема лекции:
Устройства электропривода для РЭУ и ТКС
Лекция №9
Тема лекции:
Устройства электропривода для РЭУ и ТКС
Учебные вопросы
1. Назначение, структура и элементы автоматизированного электропривода.
2. Классификация электроприводов.
3. Регулирование
Учебные вопросы
1. Назначение, структура и элементы автоматизированного электропривода.
2. Классификация электроприводов.
3. Регулирование
Литература
1. Немцов М.В. Электротехника и электроника: Учебник для вузов. – М.:
Литература
1. Немцов М.В. Электротехника и электроника: Учебник для вузов. – М.:
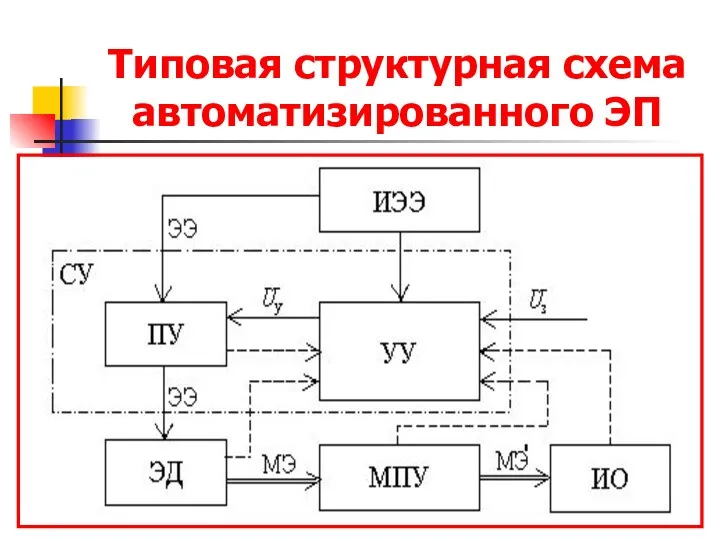
Типовая структурная схема автоматизированного ЭП
Типовая структурная схема автоматизированного ЭП
Функции автоматизированного ЭП
1. Подведение к ИО механической энергии, за счёт
Функции автоматизированного ЭП
1. Подведение к ИО механической энергии, за счёт

Классификация ЭП по виду движения
Классификация ЭП по виду движения

Классификация АЭП по степени автоматизации
Классификация АЭП по степени автоматизации
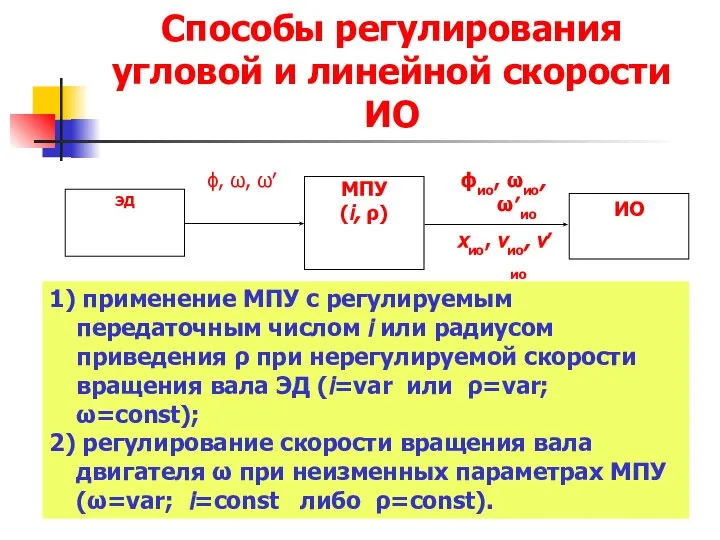
Способы регулирования угловой и линейной скорости ИО
1) применение МПУ с
Способы регулирования угловой и линейной скорости ИО
1) применение МПУ с
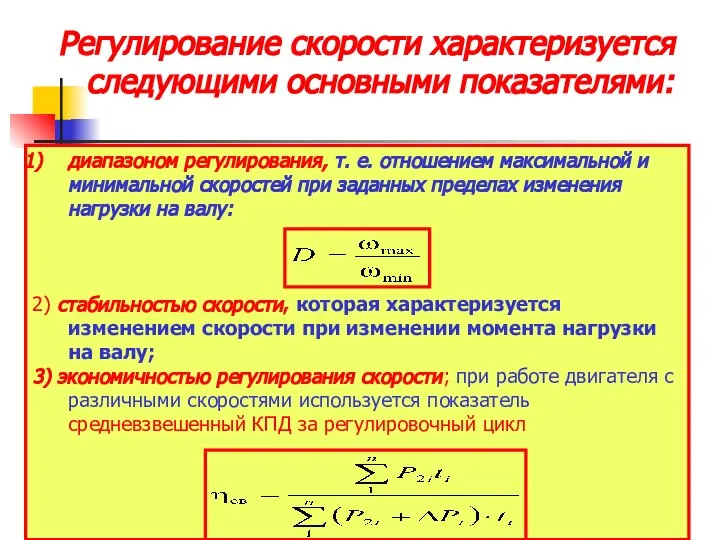
Регулирование скорости характеризуется следующими основными показателями:
диапазоном регулирования, т. е. отношением
Регулирование скорости характеризуется следующими основными показателями:
диапазоном регулирования, т. е. отношением
 Презентация на тему "Педикулёз" - скачать презентации по Медицине
Презентация на тему "Педикулёз" - скачать презентации по Медицине Политическая культура: сущность и роль в жизни общества. Выполнили Хропина Ольга и Фунтикова Виктория
Политическая культура: сущность и роль в жизни общества. Выполнили Хропина Ольга и Фунтикова Виктория Бал
Бал Электрические машины постоянного тока. Введение. Основные понятия
Электрические машины постоянного тока. Введение. Основные понятия Продвижение аккаунта в социальных сетях
Продвижение аккаунта в социальных сетях Методическая разработка занятия по валянию броши Автор-Носырева Анастасия, 1 курс, МПГУ. Преподаватель: Гудилина С.И. 2015 год
Методическая разработка занятия по валянию броши Автор-Носырева Анастасия, 1 курс, МПГУ. Преподаватель: Гудилина С.И. 2015 год  Генеральное соглашение по торговле услугами (ГАТС)
Генеральное соглашение по торговле услугами (ГАТС) Анимированный кроссворд «НАСЕКОМЫЕ» Составила: Травнева Ольга Юрьевна учитель начальных классов Республика Казахстан Кара
Анимированный кроссворд «НАСЕКОМЫЕ» Составила: Травнева Ольга Юрьевна учитель начальных классов Республика Казахстан Кара Инженерные сооружения
Инженерные сооружения Чем дальше эксперимент от теории, тем ближе он к Нобелевской премии. Фредерик Жолио-Кюри Чем дальше эксперимент от теории, тем б
Чем дальше эксперимент от теории, тем ближе он к Нобелевской премии. Фредерик Жолио-Кюри Чем дальше эксперимент от теории, тем б Основы телекоммуникаций. Устройства передачи сообщений. (Тема 1.10)
Основы телекоммуникаций. Устройства передачи сообщений. (Тема 1.10) Новый Раменский. Планировочные решения
Новый Раменский. Планировочные решения Роспись по дереву ГОРОДЕЦ
Роспись по дереву ГОРОДЕЦ Отек легких у собак
Отек легких у собак Североамериканская интеграция (НАФТА)
Североамериканская интеграция (НАФТА)  Характеристики катера "Амур-М"
Характеристики катера "Амур-М" Гимнастика как спортивнопедагогическая дисциплина
Гимнастика как спортивнопедагогическая дисциплина Косоруков Егор - Новая аналитическая платформа
Косоруков Егор - Новая аналитическая платформа Антикоррупционное мировоззрение как фактор национальной безопасности (09)
Антикоррупционное мировоззрение как фактор национальной безопасности (09) Параллельное соединение проводников
Параллельное соединение проводников Многожанровый фестиваль
Многожанровый фестиваль Конституция США и билль о правах
Конституция США и билль о правах Дисциплина Информатики
Дисциплина Информатики  Внешний контур управления ИСЗ
Внешний контур управления ИСЗ Трудовые ресурсы фирмы Кадры решают всё – девиз сегодняшнего дня.
Трудовые ресурсы фирмы Кадры решают всё – девиз сегодняшнего дня. Усадьба Остафьево
Усадьба Остафьево 7/5/2012copyright 2006 www.brainybetty.com; All Rights Reserved. 1 МИРОВОЕ ЛИТЕРАТУРНОЕ НАСЛЕДИЕ ВОСТОКА. - презентация
7/5/2012copyright 2006 www.brainybetty.com; All Rights Reserved. 1 МИРОВОЕ ЛИТЕРАТУРНОЕ НАСЛЕДИЕ ВОСТОКА. - презентация Корпоративная культура
Корпоративная культура