- Комплектование машинно-тракторного агрегата для выполнения сельскохозяйственных работ

Содержание
- 2. Контрольные вопросы 1.Каково значение рациональных способов движения агрегатов? 2.Какая основная задача кинематики агрегатов? 3.Перечислите кинематические характеристики
- 3. ДВИЖЕНИЕ МАШИННО-ТРАКТОРНЫХ АГРЕГАТОВ (КИНЕМАТИКА АГРЕГАТОВ) 1.1.ЗНАЧЕНИЕ РАЦИОНАЛЬНЫХ СПОСОБОВ ДВИЖЕНИЯ АГРЕГАТОВ 2.2.КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ АГРЕГАТА И РАБОЧЕГО УЧАСТКА
- 4. 1.ЗНАЧЕНИЕ РАЦИОНАЛЬНЫХ СПОСОБОВ ДВИЖЕНИЯ АГРЕГАТОВ Задача при этом состоит в том, чтобы холостой путь агрегата и
- 5. Под способом движения агрегата подразумевают закономерность его перемещения по полю при выполнении технологического процесса. Эта закономерность
- 6. Основной задачей Основной задачей кинематики агрегатов является обоснование методов выбора рациональных способов движения МТА и подготовки
- 7. высокая производительность при возможно меньшем расходе топлива и других ресурсов на единицу выполняемой работы; обеспечение безопасных
- 8. 2.КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ АГРЕГАТА И РАБОЧЕГО УЧАСТКА К кинематическим характеристикам МТА относятся: кинематический центр; кинематическая длина; длина
- 9. кинематическим центром Под кинематическим центром агрегата в соответствии с рисунком 4.1 подразумевают условную геометрическую точку ц
- 10. Для агрегатов, составляемых на базе колесных тракторов с жесткой рамой, точка ц определяется как проекция середины
- 11. Для агрегатов с гусеничными тракторами точка ц соответствует проекции на плоскость движения точки пересечения диагоналей, проведенных
- 12. Основные схемы расположения кинематического центра агрегата: а и б— на базе колесного трактора соответственно с жесткой
- 13. Кинематической длиной агрегата Кинематической длиной агрегата называют проекцию на плоскость движения расстояния между центром агрегата и
- 14. Кинематическая длина агрегата складывается из кинематических длин трактора , сцепки и рабочей машины Меню
- 15. Основные кинематические В- Ширина захвата агрегата; К- Колея; - Продольная база трактора Меню
- 16. Длиной выезда агрегата е называют расстояние, на которое перемещается центр агрегата от контрольной линии (границы обрабатываемого
- 17. Кинематическая ширина агрегата dK равна расстоянию между проекциями на плоскость движения продольной оси трактора и параллельной
- 18. Средний радиус поворота агрегата R (рис. ,б) приближенно определяют как расстояние от центра агрегата ц до
- 19. Кинематические характеристики рабочего участка определяются общей L и рабочей Lр длиной гона; шириной загона С; шириной
- 20. Кинематические характеристики рабочего участка Меню
- 21. Загон представляет собой часть рабочего участка прямоугольной формы, выделенную для работы на ней преимущественно одного или
- 22. Предварительная разбивка поля на загоны имеет'исключительно важное значение как для высококачественной работы, так и для повышения
- 23. Желательно в каждом хозяйстве иметь специальные агрегаты сравнительно небольшой производительности для предварительной разбивки поля на загоны:
- 24. 3. ОСНОВНЫЕ ВИДЫ ПОВОРОТОВ МТА Повороты — наиболее сложный элемент кинематики агрегатов, поэтому при выборе вида
- 25. меньшее отрицательное воздействие на окружающую среду, особенно на почву. Все виды поворотов МТА для удобства изучения
- 26. Основные виды поворотов МТА Меню
- 27. Основные виды поворотов МТА: Беспетлевые: о —круговой; б—с прямолинейным участком; в —угловой; петлевые: г — закрытая
- 28. Важнейшие кинематические характеристики всех видов поворотов — длина lп , радиус поворота R, а также ширина
- 29. (4.2) Минимальная ширина поворотной полосы E зависит от R и е, а также от кинематической ширины
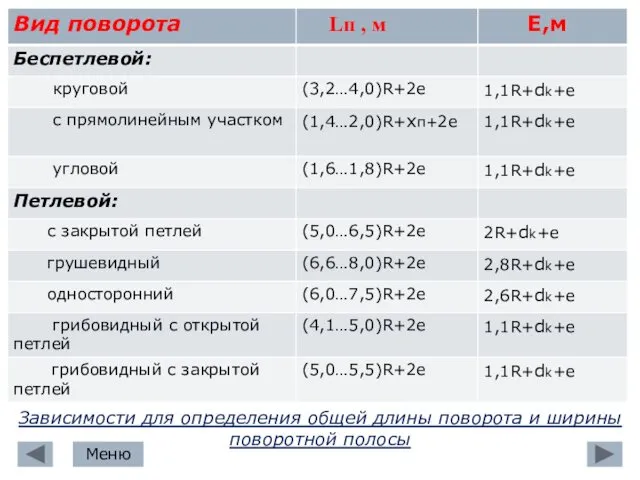
- 30. Зависимости для определения общей длины поворота и ширины поворотной полосы Меню
- 31. Примечание. х„ — прямолинейный участок траектории при повороте. Продолжительность одного поворота МТА, с, tп=Lп/Vx=(lп+2e)/Vx (4.3) где
- 32. Радиус поворота R зависит от рабочей ширины захвата В и скорости Vх движения при повороте. При
- 33. умножают на соответствующий поправочный коэффициент, принимая (4.5) где aRv — поправочный коэффициент на скорость. Численные значения
- 34. Усредненные значения аRо и аRv для навесных (числитель) и прицепных (знаменатель) агрегатов Меню
- 35. Длина выезда агрегата е, как видно из формулы (4.1), прямо пропорциональна кинетической длине lк, которая, в
- 36. При практических расчетах в зависимости от выполняемого процесса приближенно можно принять следующее значение ае: Меню
- 37. 4. СПОСОБЫ ДВИЖЕНИЯ МТА Способы движения МТА классифицируют по направлению рабочих ходов (тоновый, диагональный, круговой), способу
- 38. Основной классификационный признак способа движения МТА — направление рабочих ходов, от которого непосредственно зависят показатели холостого
- 39. Меню
- 40. гоновые петлевые: в —челночный; б— вевал; в — вразвал; г — чередование способов вевал и вразвал;
- 41. При гоновых способах движения агрегат совершает прямолинейные рабочие ходы параллельно одной или двум сторонам загона с
- 42. Гоновой челночный способ движения (рис. а) — один из самых распространенных благодаря своей простоте, и для
- 43. ;междурядную обработку пропашных культур; уборку сельскохозяйственных культур агрегатами с фронтальными рабочими органами, навешиваемыми на трактор спереди,
- 44. Однако эти способы движения возможны и на некоторых других операциях, включая лущение стерни и дискование, боронование,
- 45. Гоновой беспетлевой комбинированный способ движения (см. рис. д) при разных соотношениях между шириной попарно равных частей
- 46. При диагональном способе движения рабочие ходы агрегата совершаются под острым или тупым углом к сторонам загона
- 47. Диагональный способ движения рекомендуют применять на тех операциях, при выполнении которых агрегат должен двигаться под острым
- 48. При круговом способе движения МТА рабочие ходы совершаются вдоль всех четырех сторон загона без выключения рабочих
- 49. :лущение стерни и дискование, боронование, прикатывание почвы, уборка наземной части урожая. На практике более простым является
- 50. Почти каждую операцию можно выполнять несколькими способами движения агрегата. Поэтому в зависимости от конкретных условий работы
- 52. Скачать презентацию
Контрольные вопросы
1.Каково значение рациональных способов движения агрегатов?
2.Какая основная задача кинематики агрегатов?
3.Перечислите
Контрольные вопросы 1.Каково значение рациональных способов движения агрегатов? 2.Какая основная задача кинематики агрегатов? 3.Перечислите
ДВИЖЕНИЕ МАШИННО-ТРАКТОРНЫХ АГРЕГАТОВ (КИНЕМАТИКА АГРЕГАТОВ)
1.1.ЗНАЧЕНИЕ РАЦИОНАЛЬНЫХ СПОСОБОВ ДВИЖЕНИЯ АГРЕГАТОВ
2.2.КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ АГРЕГАТА
ДВИЖЕНИЕ МАШИННО-ТРАКТОРНЫХ АГРЕГАТОВ (КИНЕМАТИКА АГРЕГАТОВ)
1.1.ЗНАЧЕНИЕ РАЦИОНАЛЬНЫХ СПОСОБОВ ДВИЖЕНИЯ АГРЕГАТОВ
2.2.КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ АГРЕГАТА

1.ЗНАЧЕНИЕ РАЦИОНАЛЬНЫХ СПОСОБОВ ДВИЖЕНИЯ АГРЕГАТОВ
Задача при этом состоит в том,
1.ЗНАЧЕНИЕ РАЦИОНАЛЬНЫХ СПОСОБОВ ДВИЖЕНИЯ АГРЕГАТОВ
Задача при этом состоит в том,
Под способом движения агрегата подразумевают закономерность его перемещения по полю при
Под способом движения агрегата подразумевают закономерность его перемещения по полю при

Основной задачей
Основной задачей кинематики агрегатов является обоснование методов выбора рациональных способов
Основной задачей
Основной задачей кинематики агрегатов является обоснование методов выбора рациональных способов

высокая производительность при возможно меньшем расходе топлива и других ресурсов на
высокая производительность при возможно меньшем расходе топлива и других ресурсов на
2.КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ АГРЕГАТА И РАБОЧЕГО УЧАСТКА
К кинематическим характеристикам МТА относятся: кинематический
2.КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ АГРЕГАТА И РАБОЧЕГО УЧАСТКА
К кинематическим характеристикам МТА относятся: кинематический

кинематическим центром
Под кинематическим центром агрегата в соответствии с рисунком 4.1
кинематическим центром
Под кинематическим центром агрегата в соответствии с рисунком 4.1
Для агрегатов, составляемых на базе колесных тракторов с жесткой рамой,
Для агрегатов, составляемых на базе колесных тракторов с жесткой рамой,

Для агрегатов с гусеничными тракторами точка ц соответствует проекции на плоскость
Для агрегатов с гусеничными тракторами точка ц соответствует проекции на плоскость

Основные схемы расположения кинематического центра агрегата:
а и б— на базе колесного
Основные схемы расположения кинематического центра агрегата:
а и б— на базе колесного

Кинематической длиной агрегата
Кинематической длиной агрегата называют проекцию на плоскость движения
Кинематической длиной агрегата
Кинематической длиной агрегата называют проекцию на плоскость движения
Кинематическая длина агрегата складывается из кинематических длин трактора , сцепки и
Кинематическая длина агрегата складывается из кинематических длин трактора , сцепки и

Основные кинематические
В- Ширина захвата агрегата;
К- Колея;
- Продольная база трактора
Меню
Основные кинематические
В- Ширина захвата агрегата;
К- Колея;
- Продольная база трактора
Меню

Длиной выезда агрегата е называют расстояние, на которое перемещается центр агрегата
Длиной выезда агрегата е называют расстояние, на которое перемещается центр агрегата

Кинематическая ширина агрегата dK равна расстоянию между проекциями на плоскость движения
Кинематическая ширина агрегата dK равна расстоянию между проекциями на плоскость движения
Средний радиус поворота агрегата R (рис. ,б) приближенно определяют как расстояние
Средний радиус поворота агрегата R (рис. ,б) приближенно определяют как расстояние
Кинематические характеристики рабочего участка определяются общей L и рабочей Lр
Кинематические характеристики рабочего участка определяются общей L и рабочей Lр

Кинематические характеристики рабочего участка
Меню
Кинематические характеристики рабочего участка
Меню
Загон представляет собой часть рабочего участка прямоугольной формы, выделенную для работы
Загон представляет собой часть рабочего участка прямоугольной формы, выделенную для работы
Предварительная разбивка поля на загоны имеет'исключительно важное значение как для
Предварительная разбивка поля на загоны имеет'исключительно важное значение как для
Желательно в каждом хозяйстве иметь специальные агрегаты сравнительно небольшой производительности для
Желательно в каждом хозяйстве иметь специальные агрегаты сравнительно небольшой производительности для
3. ОСНОВНЫЕ ВИДЫ ПОВОРОТОВ МТА
Повороты — наиболее сложный элемент кинематики агрегатов,
3. ОСНОВНЫЕ ВИДЫ ПОВОРОТОВ МТА
Повороты — наиболее сложный элемент кинематики агрегатов,

меньшее отрицательное воздействие на окружающую среду, особенно на почву. Все виды
меньшее отрицательное воздействие на окружающую среду, особенно на почву. Все виды

Основные виды поворотов МТА
Меню
Основные виды поворотов МТА
Меню

Основные виды поворотов МТА:
Беспетлевые: о —круговой; б—с прямолинейным участком; в —угловой;
Основные виды поворотов МТА:
Беспетлевые: о —круговой; б—с прямолинейным участком; в —угловой;

Важнейшие кинематические характеристики всех видов поворотов — длина lп , радиус
Важнейшие кинематические характеристики всех видов поворотов — длина lп , радиус
(4.2)
Минимальная ширина поворотной полосы E зависит от R и е, а
(4.2)
Минимальная ширина поворотной полосы E зависит от R и е, а
Зависимости для определения общей длины поворота и ширины поворотной полосы
Меню
Зависимости для определения общей длины поворота и ширины поворотной полосы
Меню
Примечание. х„ — прямолинейный участок траектории при повороте.
Продолжительность одного поворота МТА,
Примечание. х„ — прямолинейный участок траектории при повороте.
Продолжительность одного поворота МТА,
Радиус поворота R зависит от рабочей ширины захвата В и скорости
Радиус поворота R зависит от рабочей ширины захвата В и скорости
умножают на соответствующий поправочный коэффициент, принимая
(4.5)
где aRv — поправочный коэффициент на
умножают на соответствующий поправочный коэффициент, принимая
(4.5)
где aRv — поправочный коэффициент на

Усредненные значения аRо и аRv для навесных (числитель) и прицепных (знаменатель)
Усредненные значения аRо и аRv для навесных (числитель) и прицепных (знаменатель)
Длина выезда агрегата е, как видно из формулы (4.1), прямо
Длина выезда агрегата е, как видно из формулы (4.1), прямо

При практических расчетах в зависимости от выполняемого процесса приближенно можно принять
При практических расчетах в зависимости от выполняемого процесса приближенно можно принять
4. СПОСОБЫ ДВИЖЕНИЯ МТА
Способы движения МТА классифицируют по направлению рабочих ходов
4. СПОСОБЫ ДВИЖЕНИЯ МТА
Способы движения МТА классифицируют по направлению рабочих ходов
Основной классификационный признак способа движения МТА — направление рабочих ходов, от
Основной классификационный признак способа движения МТА — направление рабочих ходов, от

Меню
Меню

гоновые петлевые:
в —челночный;
б— вевал;
в — вразвал;
г — чередование способов вевал
гоновые петлевые:
в —челночный;
б— вевал;
в — вразвал;
г — чередование способов вевал
При гоновых способах движения агрегат совершает прямолинейные рабочие ходы параллельно одной
При гоновых способах движения агрегат совершает прямолинейные рабочие ходы параллельно одной
Гоновой челночный способ движения (рис. а) — один из самых распространенных
Гоновой челночный способ движения (рис. а) — один из самых распространенных
;междурядную обработку пропашных культур; уборку сельскохозяйственных культур агрегатами с фронтальными рабочими
;междурядную обработку пропашных культур; уборку сельскохозяйственных культур агрегатами с фронтальными рабочими
Однако эти способы движения возможны и на некоторых других операциях, включая
Однако эти способы движения возможны и на некоторых других операциях, включая

Гоновой беспетлевой комбинированный способ движения (см. рис. д) при разных соотношениях
Гоновой беспетлевой комбинированный способ движения (см. рис. д) при разных соотношениях
При диагональном способе движения рабочие ходы агрегата совершаются под острым или
При диагональном способе движения рабочие ходы агрегата совершаются под острым или
Диагональный способ движения рекомендуют применять на тех операциях, при выполнении которых
Диагональный способ движения рекомендуют применять на тех операциях, при выполнении которых

При круговом способе движения МТА рабочие ходы совершаются вдоль всех четырех
При круговом способе движения МТА рабочие ходы совершаются вдоль всех четырех
:лущение стерни и дискование, боронование, прикатывание почвы, уборка наземной части урожая.
:лущение стерни и дискование, боронование, прикатывание почвы, уборка наземной части урожая.

Почти каждую операцию можно выполнять несколькими способами движения агрегата. Поэтому в
Почти каждую операцию можно выполнять несколькими способами движения агрегата. Поэтому в
 ИК-спектроскопия
ИК-спектроскопия Философские проблемы науки и техники. Наука, ее сущность и особенности возникновения. (Лекции 1-2)
Философские проблемы науки и техники. Наука, ее сущность и особенности возникновения. (Лекции 1-2) Энергия
Энергия Великие открытия М. В. Ломоносова в физике. МБОУ СОШ №1
Великие открытия М. В. Ломоносова в физике. МБОУ СОШ №1 Потенциальное движение
Потенциальное движение Теория электрических цепей. Лекция 1
Теория электрических цепей. Лекция 1 ПРЕЗЕНТАЦІЯ з фізики на тему: “Альтернативні джерела енергії” Виконала Ткаченко Анна та Яловицька Тетяна Учениці 11-Б класу
ПРЕЗЕНТАЦІЯ з фізики на тему: “Альтернативні джерела енергії” Виконала Ткаченко Анна та Яловицька Тетяна Учениці 11-Б класу  Принцип Гюйгенса. Закон отражения света
Принцип Гюйгенса. Закон отражения света Открытие электромагнитных колебаний. 11 класс
Открытие электромагнитных колебаний. 11 класс Что такое гроза? Почему светит молния и гремит гром?
Что такое гроза? Почему светит молния и гремит гром? Поверхностные явления и адсорбция
Поверхностные явления и адсорбция Презентация по физике "Силы в природе" - скачать
Презентация по физике "Силы в природе" - скачать  Отгадаем загадки
Отгадаем загадки Оптикалық саулелер, спектрлер. Спектрлік анализ
Оптикалық саулелер, спектрлер. Спектрлік анализ Выполнил: Буравлёв Степан, 11 «ф/м» класс. Руководитель: Моисеева Тамара Ивановна, учитель биологии.
Выполнил: Буравлёв Степан, 11 «ф/м» класс. Руководитель: Моисеева Тамара Ивановна, учитель биологии. Проект по физике «Лабораторные работы по физике за курс 7-9 класса»
Проект по физике «Лабораторные работы по физике за курс 7-9 класса»  Теплоотдача. Естественная конвекция
Теплоотдача. Естественная конвекция Измерение видимого и линейного увеличения, поля зрения, диаметра и удаления выходного зрачка типовых оптических систем
Измерение видимого и линейного увеличения, поля зрения, диаметра и удаления выходного зрачка типовых оптических систем Презентация по физике "Знаем ли мы физику ?" - скачать
Презентация по физике "Знаем ли мы физику ?" - скачать  Биологические действия радиоактивных излучений на растения…
Биологические действия радиоактивных излучений на растения… Подготовка к хранению и хранение техники
Подготовка к хранению и хранение техники Инфракрасное излучение
Инфракрасное излучение Политропные процессы. Энтропия идеального газа. II закон термодинамики
Политропные процессы. Энтропия идеального газа. II закон термодинамики Электронные лампы. Триоды и диоды
Электронные лампы. Триоды и диоды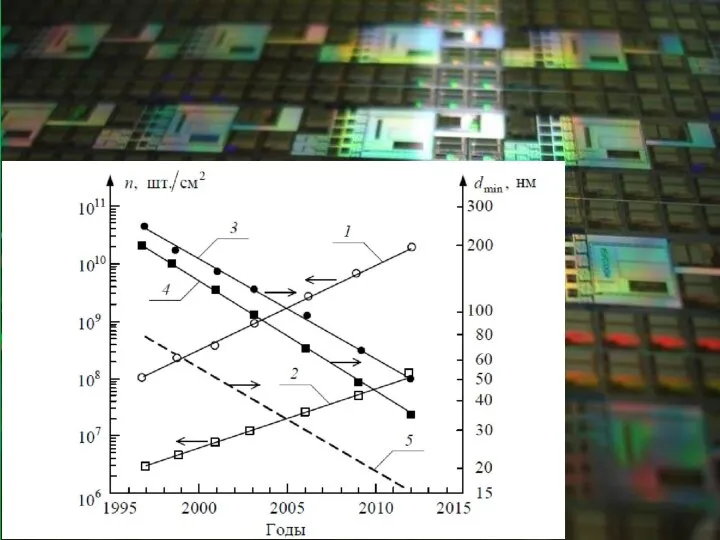 Физика наноструктур и элементы электроники
Физика наноструктур и элементы электроники Аеродинаміка та динаміка польоту літака. Характеристики профілю крила. Центр тиску та фокус профілю. (Лекція 4.2.3)
Аеродинаміка та динаміка польоту літака. Характеристики профілю крила. Центр тиску та фокус профілю. (Лекція 4.2.3) Антенны. Линейные излучающие системы. Электрические параметры симметричных и несимметричных вибраторов. (Лекция 14. Модуль 2.2)
Антенны. Линейные излучающие системы. Электрические параметры симметричных и несимметричных вибраторов. (Лекция 14. Модуль 2.2) Нелинейные цепи постоянного тока
Нелинейные цепи постоянного тока