- Курс общей физики. Лекция 1

Содержание
- 2. КАК ЗОВУТ ПРЕПОДАВАТЕЛЯ? Олейник Сергей Владимирович
- 3. ЧТО БУДЕТ? Методы контроля Проведение текущего контроля, письменного модульного контроля, семестровый контроль в виде экзаменов. Распределение
- 4. ЧТО ПОЧИТАТЬ? 1. Савельев И.В. Курс физики (учеб. для втузов). Т. 1: Механика. Молекулярная физика.– М.:
- 5. ФИЗИКА. ЧТО ЭТО? Физика (от греч. physis - природа) – это наука, изучающая простейшие и вместе
- 6. РАЗДЕЛЫ ФИЗИКИ
- 7. МЕХАНИКА. ФИЗИЧЕСКИЕ МОДЕЛИ Механика – это наука о механическом движении, заключающемся в перемещении материальных тел или
- 8. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ Траектория – это линия, которую описывает материальная точка при своем движении. Путь –
- 9. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
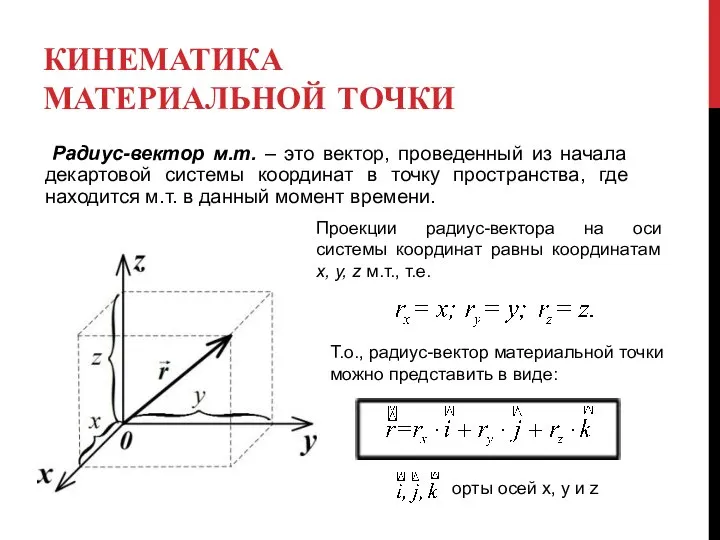
- 10. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ Радиус-вектор м.т. – это вектор, проведенный из начала декартовой системы координат в точку
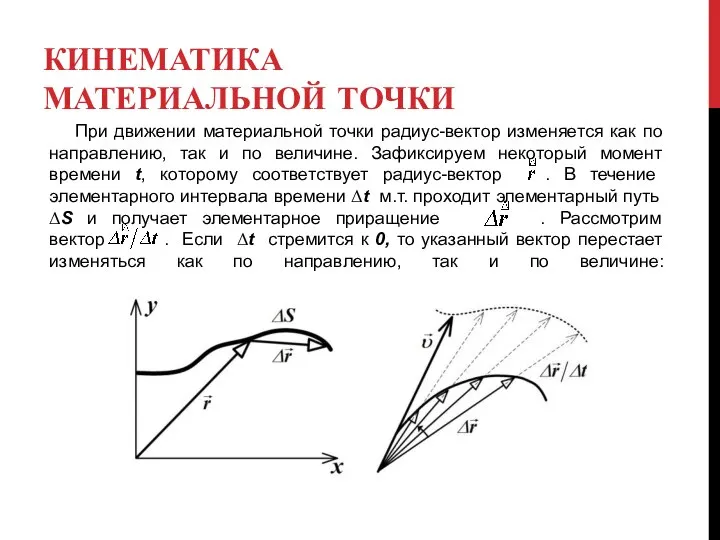
- 11. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ При движении материальной точки радиус-вектор изменяется как по направлению, так и по величине.
- 12. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ Скорость м.т. в данный момент времени – это: Направление вектора скорости определяет касательная
- 13. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ Модуль скорости м.т. запишется выражением: В случае, если Δt стремится к 0, модуль
- 14. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
- 15. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ Аналогично определению скорости м.т. можно записать ее ускорение: Т.о., скорость м.т. – это
- 16. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ Средней скоростью и средним ускорением называют векторные величины, определяемые как и
- 17. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ Нормальное и тангенциальное ускорение. Радиус кривизны траектории Рассмотрим криволинейное движение м.т. При этом
- 18. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ Тангенциальное ускорение – это физическая величина, которая характеризует быстроту изменения величины скорости Определим
- 19. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ Величина, равная называется радиусом кривизны траектории
- 20. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ Точка О называется центром кривизны траектории в т. 1. Если т.1 и т.2
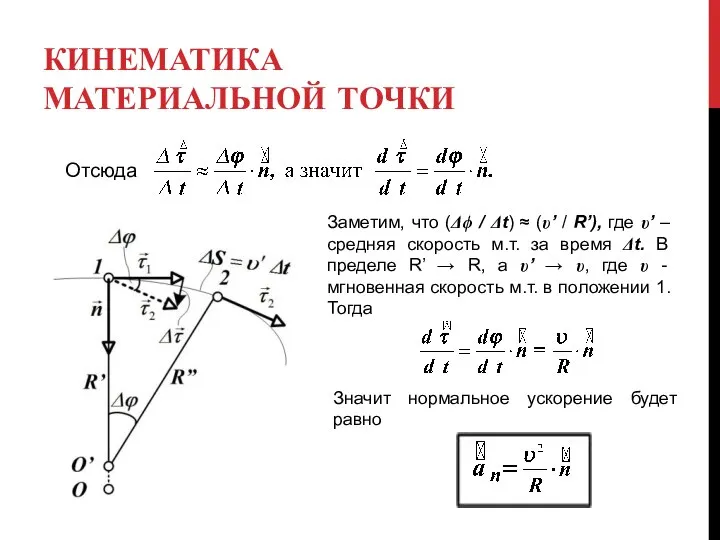
- 21. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ Отсюда Заметим, что (Δϕ / Δt) ≈ (υ’ / R’), где υ’ –
- 22. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ Нормальное ускорение – это физическая величина, которая характеризует изменение направления скорости Учитывая выше
- 23. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ В основе классической механики лежат законы Ньютона, преобразования Галилея, положение о существовании инерциальных
- 24. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ Существуют такие системы отсчета, относительно которых тело (материальная точка) при отсутствии на него
- 25. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ Ускорение всякого тела прямо пропорционально действующей на него силе и обратно пропорционально массе
- 26. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ Здесь m – масса тела (м.т.); – сила, воздействующая на тело (м.т); –
- 27. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ Тела взаимодействуют друг с другом с силами, равными по модулю и противоположными по
- 28. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ Закон сохранения импульса Механическая система – совокупность тел, рассматриваемых в задаче. Тела системы
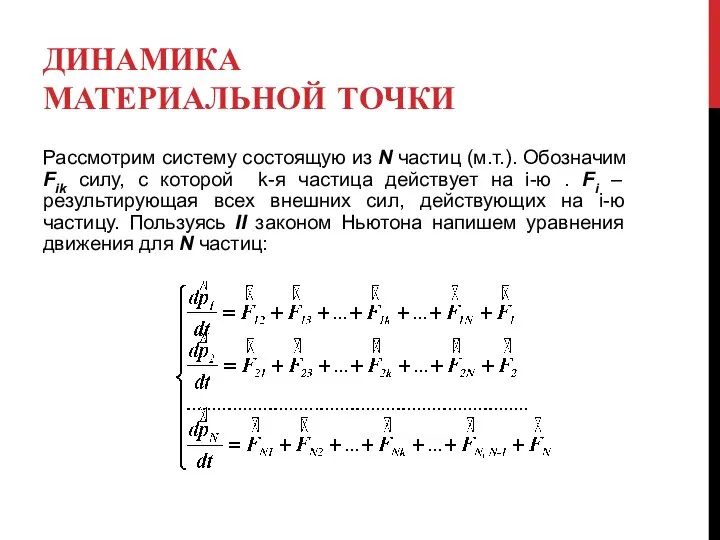
- 29. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ Рассмотрим систему состоящую из N частиц (м.т.). Обозначим Fik силу, с которой k-я
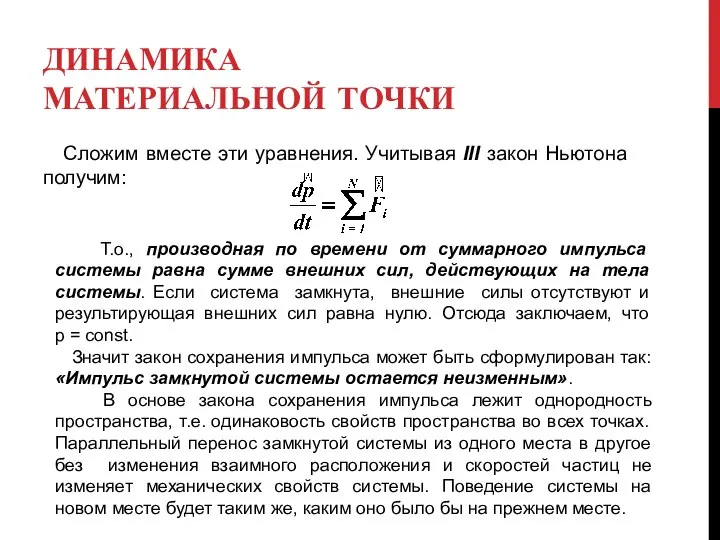
- 30. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ Сложим вместе эти уравнения. Учитывая III закон Ньютона получим: Т.о., производная по времени
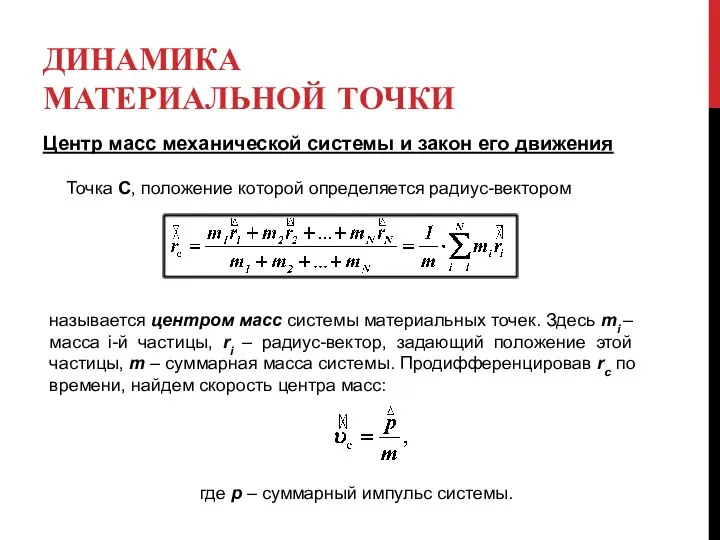
- 31. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ Центр масс механической системы и закон его движения Точка С, положение которой определяется
- 33. Скачать презентацию
КАК ЗОВУТ ПРЕПОДАВАТЕЛЯ?
Олейник
Сергей
Владимирович
КАК ЗОВУТ ПРЕПОДАВАТЕЛЯ?
Олейник
Сергей
Владимирович
ЧТО БУДЕТ?
Методы контроля
Проведение текущего контроля, письменного модульного контроля, семестровый контроль
ЧТО БУДЕТ?
Методы контроля
Проведение текущего контроля, письменного модульного контроля, семестровый контроль

ЧТО ПОЧИТАТЬ?
1. Савельев И.В. Курс физики (учеб. для втузов). Т. 1:
ЧТО ПОЧИТАТЬ?
1. Савельев И.В. Курс физики (учеб. для втузов). Т. 1:
ФИЗИКА. ЧТО ЭТО?
Физика (от греч. physis - природа) – это
ФИЗИКА. ЧТО ЭТО?
Физика (от греч. physis - природа) – это

РАЗДЕЛЫ ФИЗИКИ
РАЗДЕЛЫ ФИЗИКИ
МЕХАНИКА. ФИЗИЧЕСКИЕ МОДЕЛИ
Механика – это наука о механическом движении, заключающемся в
МЕХАНИКА. ФИЗИЧЕСКИЕ МОДЕЛИ
Механика – это наука о механическом движении, заключающемся в
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Траектория – это линия, которую описывает материальная точка при
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Траектория – это линия, которую описывает материальная точка при
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Радиус-вектор м.т. – это вектор, проведенный из начала
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Радиус-вектор м.т. – это вектор, проведенный из начала
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
При движении материальной точки радиус-вектор изменяется как по
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
При движении материальной точки радиус-вектор изменяется как по
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Скорость м.т. в данный момент времени – это:
Направление
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Скорость м.т. в данный момент времени – это:
Направление
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Модуль скорости м.т. запишется выражением:
В случае, если
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Модуль скорости м.т. запишется выражением:
В случае, если
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Аналогично определению скорости м.т. можно записать ее ускорение:
Т.о.,
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Аналогично определению скорости м.т. можно записать ее ускорение:
Т.о.,
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Средней скоростью и средним ускорением называют векторные величины, определяемые
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Средней скоростью и средним ускорением называют векторные величины, определяемые
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
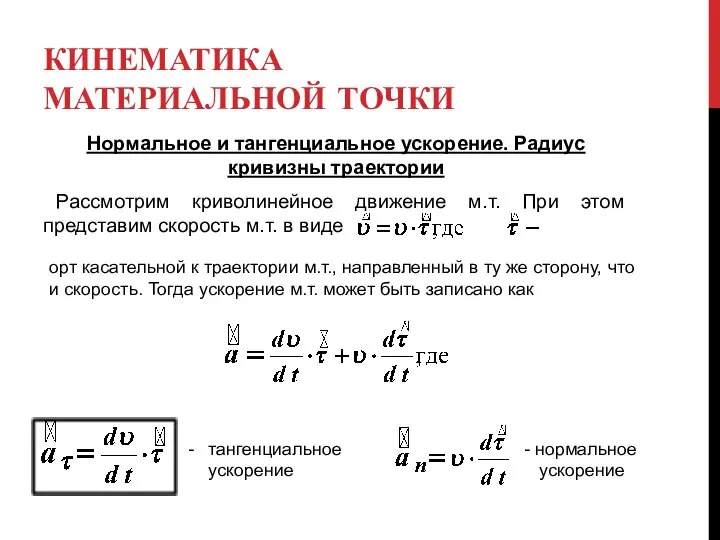
Нормальное и тангенциальное ускорение. Радиус кривизны траектории
Рассмотрим криволинейное
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Нормальное и тангенциальное ускорение. Радиус кривизны траектории
Рассмотрим криволинейное
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
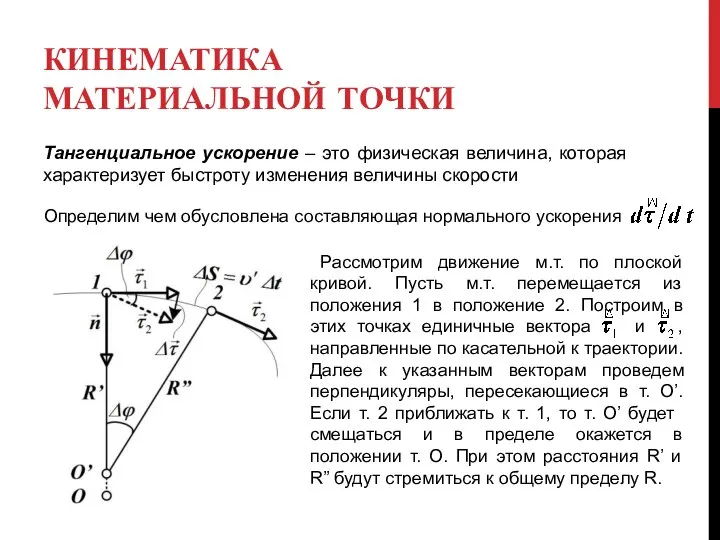
Тангенциальное ускорение – это физическая величина, которая характеризует быстроту
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Тангенциальное ускорение – это физическая величина, которая характеризует быстроту
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
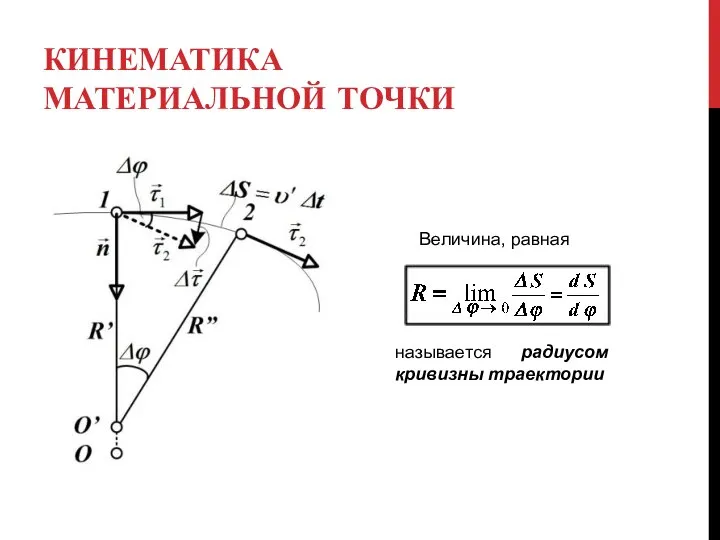
Величина, равная
называется радиусом кривизны траектории
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Величина, равная
называется радиусом кривизны траектории
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Точка О называется центром кривизны траектории в т.
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Точка О называется центром кривизны траектории в т.
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Отсюда
Заметим, что (Δϕ / Δt) ≈ (υ’ / R’),
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Отсюда
Заметим, что (Δϕ / Δt) ≈ (υ’ / R’),
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Нормальное ускорение – это физическая величина, которая характеризует изменение
КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Нормальное ускорение – это физическая величина, которая характеризует изменение
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
В основе классической механики лежат законы Ньютона, преобразования
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
В основе классической механики лежат законы Ньютона, преобразования
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Существуют такие системы отсчета, относительно которых тело (материальная точка)
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Существуют такие системы отсчета, относительно которых тело (материальная точка)
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Ускорение всякого тела прямо пропорционально действующей на него силе
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Ускорение всякого тела прямо пропорционально действующей на него силе
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Здесь m – масса тела (м.т.); – сила,
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Здесь m – масса тела (м.т.); – сила,
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Тела взаимодействуют друг с другом с силами, равными по
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Тела взаимодействуют друг с другом с силами, равными по
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Закон сохранения импульса
Механическая система – совокупность тел, рассматриваемых в
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Закон сохранения импульса
Механическая система – совокупность тел, рассматриваемых в
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Рассмотрим систему состоящую из N частиц (м.т.). Обозначим Fik
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Рассмотрим систему состоящую из N частиц (м.т.). Обозначим Fik
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Сложим вместе эти уравнения. Учитывая III закон Ньютона
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Сложим вместе эти уравнения. Учитывая III закон Ньютона
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Центр масс механической системы и закон его движения
Точка С,
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Центр масс механической системы и закон его движения
Точка С,
 Нікола Тесла Підготував: Штефуца Юрій 11-Б
Нікола Тесла Підготував: Штефуца Юрій 11-Б  Лекция 4. Моделирование технологических процессов. Диффузия
Лекция 4. Моделирование технологических процессов. Диффузия Лазерный измеритель тока ЛИЭТ. Нанотехнологии и лазеры в энергетике
Лазерный измеритель тока ЛИЭТ. Нанотехнологии и лазеры в энергетике Шкала электромагнитных излучений
Шкала электромагнитных излучений Кошка Мурка как объект физических исследований
Кошка Мурка как объект физических исследований Генератор на транзисторе
Генератор на транзисторе Фотоэлектрический эффект
Фотоэлектрический эффект Механічні взаємодії. Сила. Вимірювання сил. Рівнодійна
Механічні взаємодії. Сила. Вимірювання сил. Рівнодійна Ампе́р, Вольт, Закон Ома. Характеристики резисторов
Ампе́р, Вольт, Закон Ома. Характеристики резисторов Инфракрасная спектроскопия
Инфракрасная спектроскопия Реологические модели
Реологические модели Биофизика физикалық және химиялық процестерді зерттейтін ғылым
Биофизика физикалық және химиялық процестерді зерттейтін ғылым Automaty a regularní výrazy. (Lekce 3)
Automaty a regularní výrazy. (Lekce 3) Электротехника и электроника. Спектральный метод анализа электрических цепей. (Лекция 9)
Электротехника и электроника. Спектральный метод анализа электрических цепей. (Лекция 9) Основы физики деления ядер
Основы физики деления ядер Теплопередача. Сложный теплообмен
Теплопередача. Сложный теплообмен Автоматические регуляторы
Автоматические регуляторы Квантовая механика Волновая функция. Лекция 9
Квантовая механика Волновая функция. Лекция 9 Генератор переменного тока
Генератор переменного тока Презентация Сила. Явление тяготения. Сила тяжести
Презентация Сила. Явление тяготения. Сила тяжести Кипение. Удельная теплота парообразования и конденсации
Кипение. Удельная теплота парообразования и конденсации Выталкивающая сила
Выталкивающая сила Презентация по физике Механическая мощность и работа
Презентация по физике Механическая мощность и работа  Закон Ома
Закон Ома Ядерный реактор холодного ядерного синтеза
Ядерный реактор холодного ядерного синтеза Презентация УРОК ФИЗИКИ В 10 КЛАССЕ Сила тяжести. Вес тела. Сила упругости
Презентация УРОК ФИЗИКИ В 10 КЛАССЕ Сила тяжести. Вес тела. Сила упругости Парова турбіна
Парова турбіна  Силы в природе, законы Ньютона. Решение задач
Силы в природе, законы Ньютона. Решение задач