- Основные понятия статики

Содержание
- 2. Теоретической механикой называется наука об общих законах движения и равновесия материальных тел и о возникающих при
- 3. 3 Основная задача теоретической механики Основной задачей теоретической механики является изучение общих законов движения и равновесия
- 4. 4 Статика Статикой называется раздел механики, в котором излагается общее учение о силах и изучается условия
- 5. ОСНОВНЫЕ ПОНЯТИЯ Абсолютно твердое тело – тело, расстояние между любыми двумя точками которого всегда остается неизменным
- 6. Сила Прямая DВ, вдоль которой направлена сила, называется линией действия силы действие силы на тело не
- 7. Основные понятия статики Совокупность сил, действующих на какое-нибудь твердое тело, называется системой сил. Тело, не скрепленное
- 8. Основные понятия статики Если данная система сил эквивалентна одной силе, то эта сила называется равнодействующей данной
- 9. Аксиомы статики Аксиома 1. Если на свободное абсолютно твердое тело действуют две силы, то тело может
- 10. Аксиомы статики Аксиома 2. Действие данной системы, сил на абсолютно твердое тело не изменится, если к
- 11. Аксиомы статики Аксиома 3 (аксиома параллелограмма сил). Две силы, приложенные к телу в одной точке, имеют
- 12. Аксиомы статики Аксиома 4. При всяком действии одного материального тела на другое имеет место такое же
- 13. Связи и их реакции Тело, которое не скреплено с другими телами и может совершать из данного
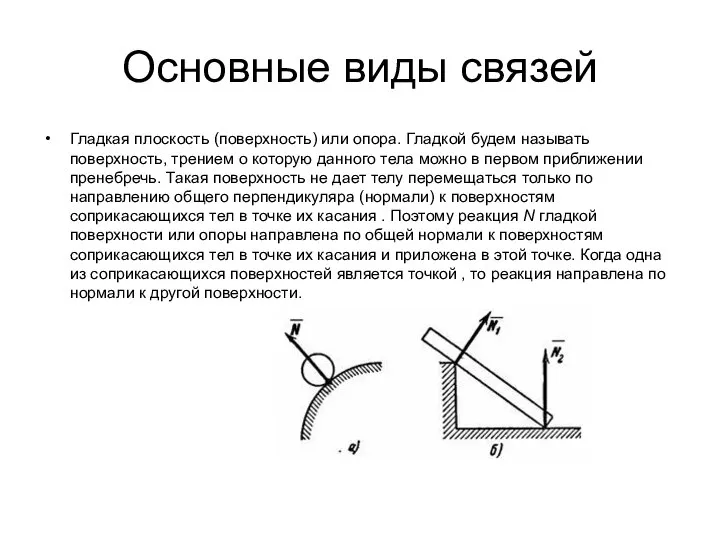
- 14. Основные виды связей Гладкая плоскость (поверхность) или опора. Гладкой будем называть поверхность, трением о которую данного
- 15. Основные виды связей Нить. Связь, осуществленная в виде гибкой нерастяжимой нити, не дает телу М удаляться
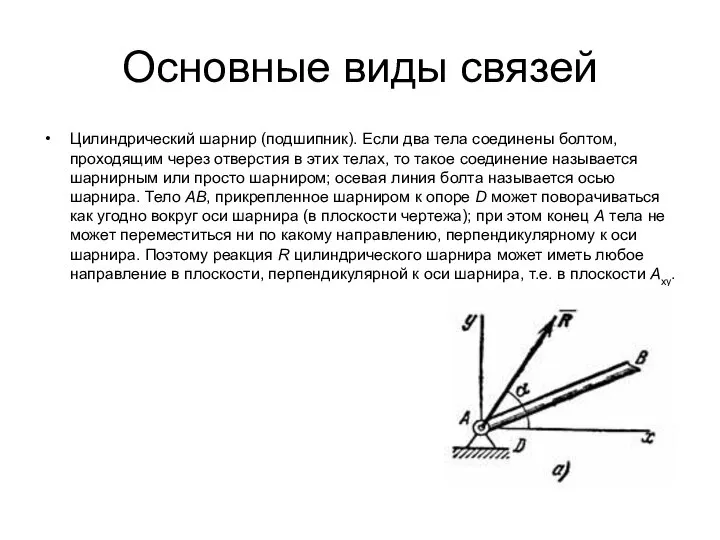
- 16. Основные виды связей Цилиндрический шарнир (подшипник). Если два тела соединены болтом, проходящим через отверстия в этих
- 17. Основные виды связей Шаровой шарнир и подпятник. Этот вид связи закрепляет какую-нибудь точку тела так, что
- 18. Основные виды связей Стержень. Нагруженный на концах стержень, весом которого по сравнению с этими нагрузками можно
- 19. Основные виды связей Неподвижная защемляющая опора или жесткая заделка. В этом случае на заделанный конец балки
- 20. Проецирование силы на ось Проекцией вектора на ось называется скалярная величина, которая определяется отрезком, отсекаемым перпендикулярами,
- 21. Проецирование силы Направляющими косинусами вектора называются косинусы углов между вектором и положительными направлениями осей Ox, Oy
- 23. Скачать презентацию
Теоретической механикой
называется наука об общих законах движения и равновесия
называется наука об общих законах движения и равновесия

3
Основная задача теоретической механики
Основной задачей теоретической механики является изучение общих законов
3
Основная задача теоретической механики
Основной задачей теоретической механики является изучение общих законов

4
Статика
Статикой называется раздел механики, в котором излагается общее учение о силах
4
Статика
Статикой называется раздел механики, в котором излагается общее учение о силах
ОСНОВНЫЕ ПОНЯТИЯ
Абсолютно твердое тело – тело, расстояние между любыми двумя точками
ОСНОВНЫЕ ПОНЯТИЯ
Абсолютно твердое тело – тело, расстояние между любыми двумя точками

Сила
Прямая DВ, вдоль которой
направлена сила,
называется
линией действия силы
действие силы на тело
Сила
Прямая DВ, вдоль которой
направлена сила,
называется
линией действия силы
действие силы на тело

Основные понятия статики
Совокупность сил, действующих на какое-нибудь твердое тело, называется системой
Основные понятия статики
Совокупность сил, действующих на какое-нибудь твердое тело, называется системой

Основные понятия статики
Если данная система сил эквивалентна одной силе, то эта
Основные понятия статики
Если данная система сил эквивалентна одной силе, то эта

Аксиомы статики
Аксиома 1. Если на свободное абсолютно твердое
тело действуют две силы,
Аксиомы статики
Аксиома 1. Если на свободное абсолютно твердое
тело действуют две силы,

Аксиомы статики
Аксиома 2. Действие данной системы, сил на абсолютно твердое тело не
Аксиомы статики
Аксиома 2. Действие данной системы, сил на абсолютно твердое тело не

Аксиомы статики
Аксиома 3 (аксиома параллелограмма сил).
Две силы, приложенные к телу в
Аксиомы статики
Аксиома 3 (аксиома параллелограмма сил).
Две силы, приложенные к телу в
Аксиомы статики
Аксиома 4. При всяком действии одного материального тела на другое имеет
Аксиомы статики
Аксиома 4. При всяком действии одного материального тела на другое имеет

Связи и их реакции
Тело, которое не скреплено с другими телами и
Связи и их реакции
Тело, которое не скреплено с другими телами и
Основные виды связей
Гладкая плоскость (поверхность) или опора. Гладкой будем называть поверхность,
Основные виды связей
Гладкая плоскость (поверхность) или опора. Гладкой будем называть поверхность,

Основные виды связей
Нить. Связь, осуществленная в виде гибкой
нерастяжимой нити, не дает
Основные виды связей
Нить. Связь, осуществленная в виде гибкой
нерастяжимой нити, не дает
Основные виды связей
Цилиндрический шарнир (подшипник). Если два тела соединены болтом, проходящим
Основные виды связей
Цилиндрический шарнир (подшипник). Если два тела соединены болтом, проходящим

Основные виды связей
Шаровой шарнир и подпятник. Этот вид связи закрепляет какую-нибудь
Основные виды связей
Шаровой шарнир и подпятник. Этот вид связи закрепляет какую-нибудь

Основные виды связей
Стержень. Нагруженный на концах стержень, весом которого по сравнению с
этими нагрузками можно пренебречь,
Основные виды связей
Стержень. Нагруженный на концах стержень, весом которого по сравнению с
этими нагрузками можно пренебречь,

Основные виды связей
Неподвижная защемляющая опора или жесткая заделка. В этом случае
Основные виды связей
Неподвижная защемляющая опора или жесткая заделка. В этом случае

Проецирование силы на ось
Проекцией вектора на ось называется скалярная величина, которая
Проецирование силы на ось
Проекцией вектора на ось называется скалярная величина, которая

Проецирование силы
Направляющими косинусами вектора называются косинусы углов между вектором и положительными направлениями
Проецирование силы
Направляющими косинусами вектора называются косинусы углов между вектором и положительными направлениями
 Геометрическое движение в физике
Геометрическое движение в физике Третий закон Ньютона
Третий закон Ньютона Брейн - ринг. Физика
Брейн - ринг. Физика Дозиметрия ионизирующих излучений. Лекция 2
Дозиметрия ионизирующих излучений. Лекция 2 Задняя подвеска Skoda Octavia A5
Задняя подвеска Skoda Octavia A5 Реостаты. Работа реостата
Реостаты. Работа реостата Свойства жидкостей
Свойства жидкостей Вес воздуха. Атмосферное давление
Вес воздуха. Атмосферное давление Техническая эксплуатация. Жизненный цикл РЭО
Техническая эксплуатация. Жизненный цикл РЭО Выталкивающая сила
Выталкивающая сила Аттестационная работа. Измерение радиационного гамма-фона в здании ГБОУ СО НППК и на прилежащей территории. (11 класс)
Аттестационная работа. Измерение радиационного гамма-фона в здании ГБОУ СО НППК и на прилежащей территории. (11 класс) Уравнение состояния реального газа Ван-Дер-Ваальса. (Лекция 11)
Уравнение состояния реального газа Ван-Дер-Ваальса. (Лекция 11) Сила трения. Тест
Сила трения. Тест Расчёт сооружений на действие подвижных и других временных нагрузок
Расчёт сооружений на действие подвижных и других временных нагрузок Методические рекомендации при выполнении экспериментальных заданий ОГЭ-2016 по физике
Методические рекомендации при выполнении экспериментальных заданий ОГЭ-2016 по физике Кинематика. Подготовка к контрольной работе
Кинематика. Подготовка к контрольной работе Сложение скоростей Сложение скоростей Учитель Кононов Геннадий Григорьевич СОШ № 29 Славянский район Краснод
Сложение скоростей Сложение скоростей Учитель Кононов Геннадий Григорьевич СОШ № 29 Славянский район Краснод Моделирование электрофизических свойств gaas методом монте-карло
Моделирование электрофизических свойств gaas методом монте-карло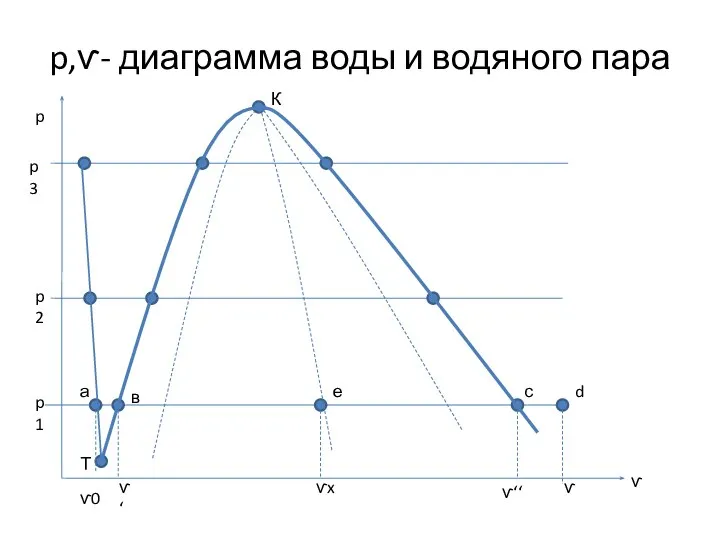 Диаграммы воды и водяного пара
Диаграммы воды и водяного пара Деление ядер урана. Цепная реакция
Деление ядер урана. Цепная реакция Работа и энергия. (Тема 4)
Работа и энергия. (Тема 4) Формула Ляме
Формула Ляме Броуновское движение
Броуновское движение  Закон Всемирного тяготения
Закон Всемирного тяготения Гравитациялық өріс. Өріс теориясының элементтері
Гравитациялық өріс. Өріс теориясының элементтері Последовательное соединение проводников. Особенности последовательного соединения проводников
Последовательное соединение проводников. Особенности последовательного соединения проводников Основные положения термодинамики и теплотехники
Основные положения термодинамики и теплотехники Радиолокация. История радиолокации
Радиолокация. История радиолокации