- Сервопривод

Содержание
- 2. Сервопривод Сервопривод получает на вход значение управляющего параметра. Например, угол поворота Блок управления сравнивает это значение
- 3. Устройство сервопривод
- 4. Управление сервоприводом. Интерфейс управляющих сигналов Чтобы указать сервоприводу желаемое положение, по предназначенному для этого проводу необходимо
- 5. Сервопривод FS5106B Характеристики: Диапазон вращения: 180° Напряжение питания: 4,8–6 В Крутящий момент: 5 кг·см при 4,8
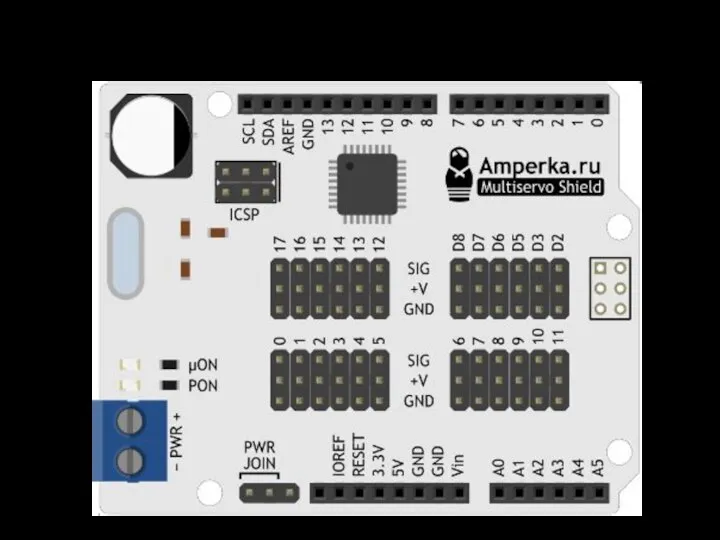
- 6. Multiservo Shield Характеристики: Максимальный постоянный ток на сервы: 10 А Интерфейс управления: I²C Количество сервоприводов: 18
- 7. Устройство сервопривод
- 8. Пример работы Multiservo Shield Необходимо подключить библиотеки: #include // библиотека для работы с I2C #include //
- 10. Скачать презентацию

Сервопривод
Сервопривод получает на вход значение управляющего параметра. Например, угол поворота
Блок управления
Сервопривод
Сервопривод получает на вход значение управляющего параметра. Например, угол поворота
Блок управления
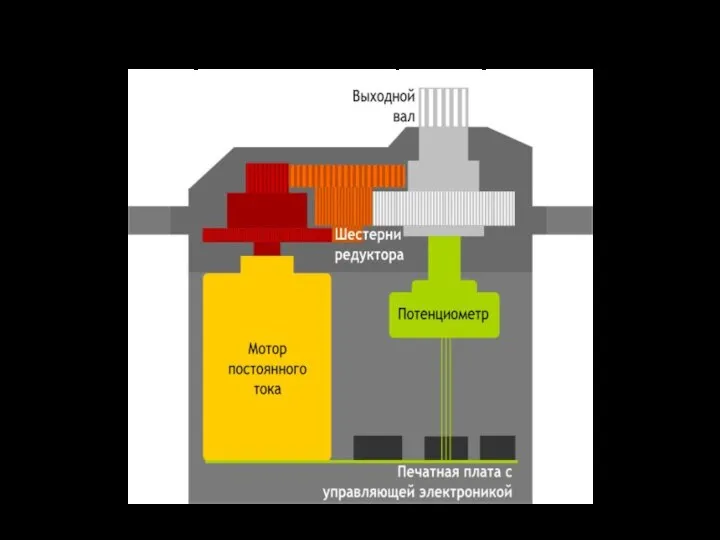
Устройство сервопривод
Устройство сервопривод
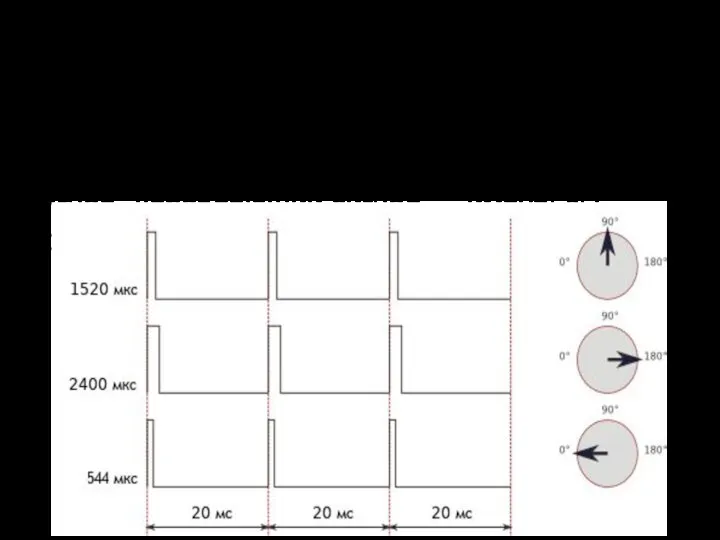
Управление сервоприводом. Интерфейс управляющих сигналов
Чтобы указать сервоприводу желаемое положение, по предназначенному
Управление сервоприводом. Интерфейс управляющих сигналов
Чтобы указать сервоприводу желаемое положение, по предназначенному
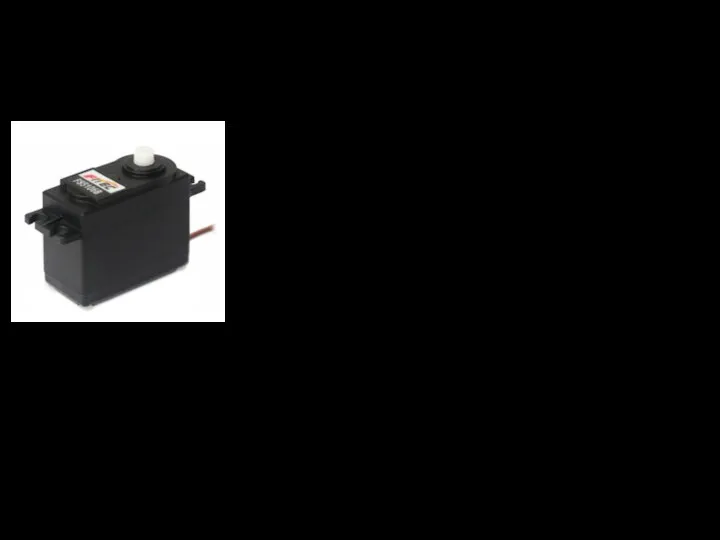
Сервопривод FS5106B
Характеристики:
Диапазон вращения: 180°
Напряжение питания: 4,8–6 В
Крутящий момент: 5 кг·см при
Сервопривод FS5106B
Характеристики:
Диапазон вращения: 180°
Напряжение питания: 4,8–6 В
Крутящий момент: 5 кг·см при
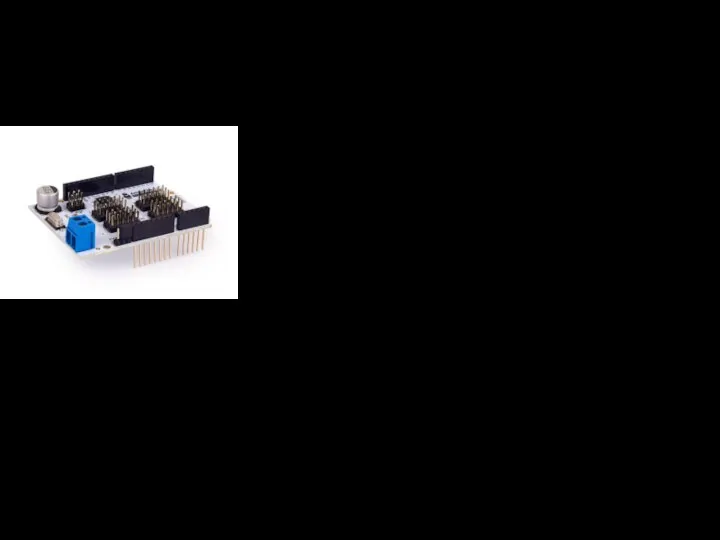
Multiservo Shield
Характеристики:
Максимальный постоянный ток на сервы: 10 А
Интерфейс управления: I²C
Количество сервоприводов:
Multiservo Shield
Характеристики:
Максимальный постоянный ток на сервы: 10 А
Интерфейс управления: I²C
Количество сервоприводов:
Устройство сервопривод
Устройство сервопривод
Пример работы Multiservo Shield
Необходимо подключить библиотеки:
#include // библиотека для работы
Пример работы Multiservo Shield
Необходимо подключить библиотеки:
#include
 Реактивное движение
Реактивное движение Подготовил студент группы ммл-12-1 Сидун Илья
Подготовил студент группы ммл-12-1 Сидун Илья Линии передачи электромагнитных волн. Элементы фидерного тракта. (Тема 1.4)
Линии передачи электромагнитных волн. Элементы фидерного тракта. (Тема 1.4) Галилео Галилей
Галилео Галилей ТЕМА УРОКА: Радиоактивное превращение ядер
ТЕМА УРОКА: Радиоактивное превращение ядер  Последовательное и параллельное соединения проводников
Последовательное и параллельное соединения проводников Биологическое действие радиоактивных изотопов. Радиация и жизнь
Биологическое действие радиоактивных изотопов. Радиация и жизнь Разработка технологического процесса механической обработки детали Ось
Разработка технологического процесса механической обработки детали Ось История развития физики. Физика и техника
История развития физики. Физика и техника Соединения проводников
Соединения проводников Транзисторы. Практическое применение транзисторов, диодов и конденсаторов. Лекция 6
Транзисторы. Практическое применение транзисторов, диодов и конденсаторов. Лекция 6 Понятие механической работы. Понятие мощности. Единицы измерения мощности
Понятие механической работы. Понятие мощности. Единицы измерения мощности Движение частиц вещества
Движение частиц вещества Основы термодинамики
Основы термодинамики Physical Output
Physical Output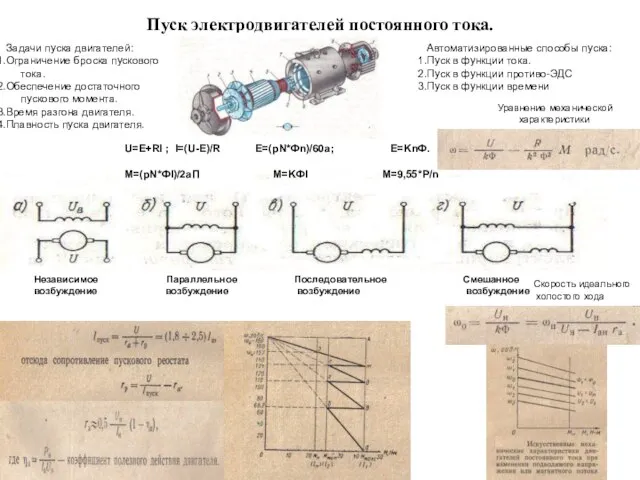 Пуск электродвигателей постоянного тока. Системы управления судовыми кранами. (Билет 7)
Пуск электродвигателей постоянного тока. Системы управления судовыми кранами. (Билет 7) Основы квантовой механики (Лекция 6)
Основы квантовой механики (Лекция 6) ИСПОЛЬЗОВАНИЕ ЭНЕРГИИ СОЛНЦА НА ЗЕМЛЕ
ИСПОЛЬЗОВАНИЕ ЭНЕРГИИ СОЛНЦА НА ЗЕМЛЕ  Презентация по физике Компьютерное моделирование
Презентация по физике Компьютерное моделирование  Демонтаж системы питания дизельных двигателей
Демонтаж системы питания дизельных двигателей Динамика твердого тела. Момент силы. Момент инерции. Теорема Штейнера. Основное уравнение динамики вращательного движения
Динамика твердого тела. Момент силы. Момент инерции. Теорема Штейнера. Основное уравнение динамики вращательного движения Атомно – абсорбционная спектроскопия (ААС)
Атомно – абсорбционная спектроскопия (ААС) Электромагнитные колебания
Электромагнитные колебания Единица измерения. Сантиметр
Единица измерения. Сантиметр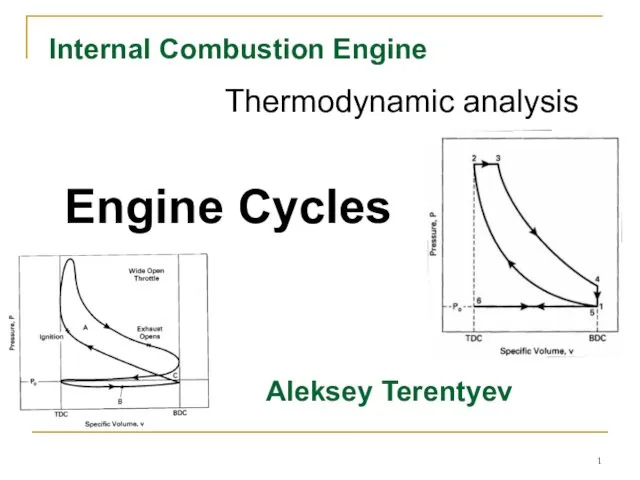 Internal сombustion engine. Thermodynamic analysis. Engine cycles
Internal сombustion engine. Thermodynamic analysis. Engine cycles Вихревое течение. Теорема Томсона
Вихревое течение. Теорема Томсона Пограничный слой и способы управления этим слоем
Пограничный слой и способы управления этим слоем The second law of thermodynamics
The second law of thermodynamics