- Теорема о трех силах. (Лекция 2)

Содержание
- 2. Вес диска реакция шарнира RA=… H. ТЕОРЕМА О ТРЕХ СИЛАХ
- 3. Решение: ТЕОРЕМА О ТРЕХ СИЛАХ
- 4. Плечом силы относительно какой-либо точки (центра) называется кратчайшее расстояние от указанной точки до линии действия силы.
- 5. МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ Момент силы относительно центра это вектор, численно равный произведению модуля силы на
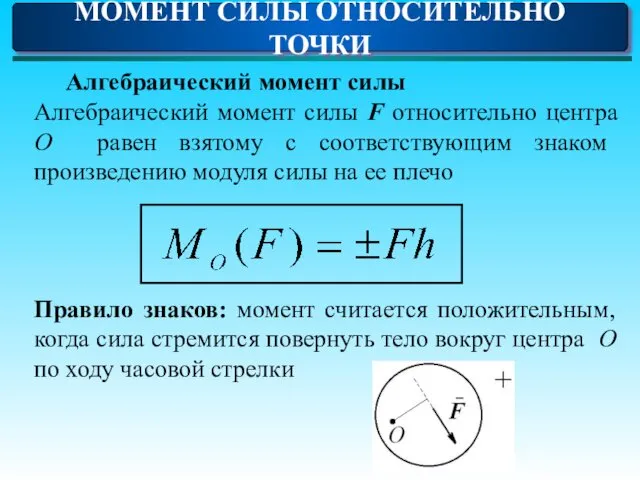
- 6. МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ Алгебраический момент силы Алгебраический момент силы F относительно центра О равен взятому
- 7. Пара сил - совокупность двух параллельных, равных по модулю, противоположно направленных сил. ПАРА СИЛ Плечо пары
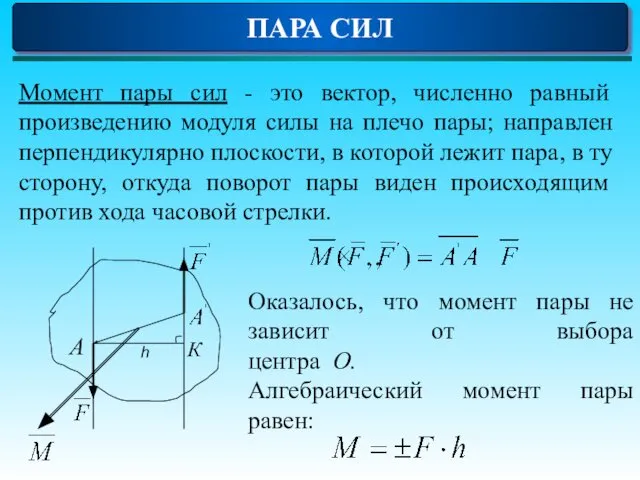
- 8. ПАРА СИЛ Момент пары сил - это вектор, численно равный произведению модуля силы на плечо пары;
- 9. ПАРА СИЛ На плоскости пара сил изображается Свойства пар 1. Момент пары – свободный вектор, т.е.
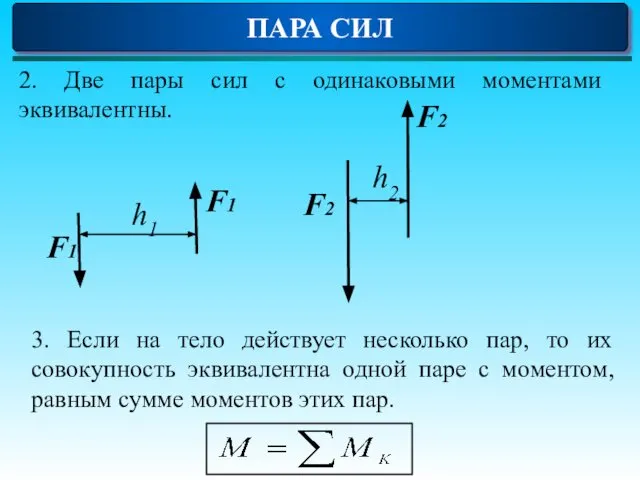
- 10. ПАРА СИЛ 2. Две пары сил с одинаковыми моментами эквивалентны. 3. Если на тело действует несколько
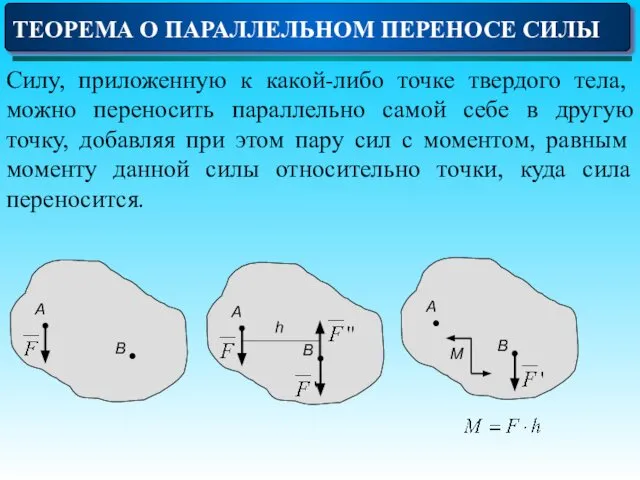
- 11. ТЕОРЕМА О ПАРАЛЛЕЛЬНОМ ПЕРЕНОСЕ СИЛЫ Силу, приложенную к какой-либо точке твердого тела, можно переносить параллельно самой
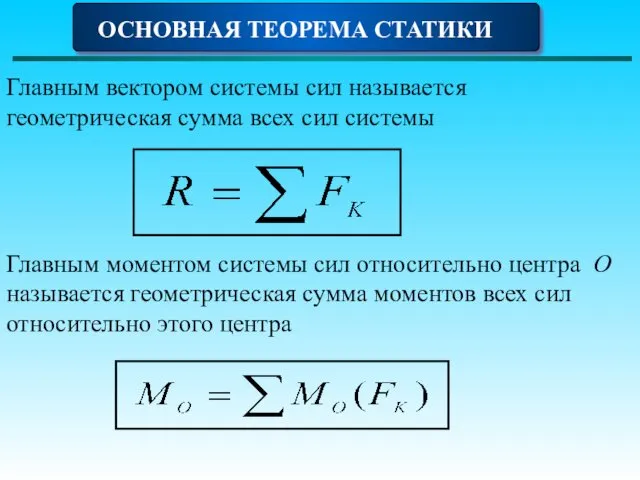
- 12. ОСНОВНАЯ ТЕОРЕМА СТАТИКИ Главным вектором системы сил называется геометрическая сумма всех сил системы Главным моментом системы
- 13. ОСНОВНАЯ ТЕОРЕМА СТАТИКИ Теорема Пуансо Всякую пространственную систему сил можно заменить эквивалентной системой, состоящей из силы,
- 14. ОСНОВНАЯ ТЕОРЕМА СТАТИКИ А В C O А В C O MO ~ , где ;
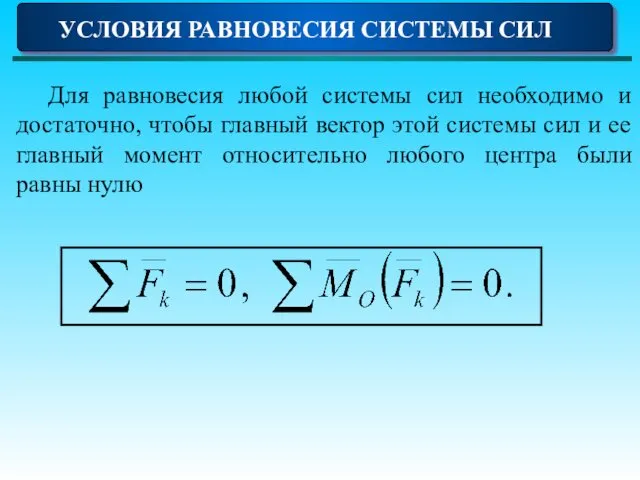
- 15. УСЛОВИЯ РАВНОВЕСИЯ СИСТЕМЫ СИЛ Для равновесия любой системы сил необходимо и достаточно, чтобы главный вектор этой
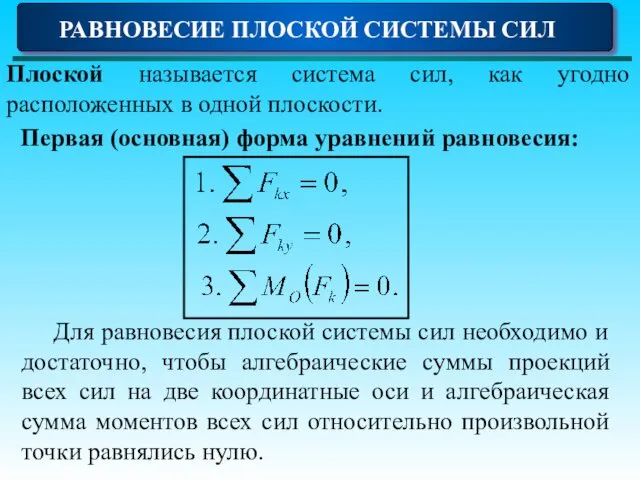
- 16. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ Плоской называется система сил, как угодно расположенных в одной плоскости. Первая (основная)
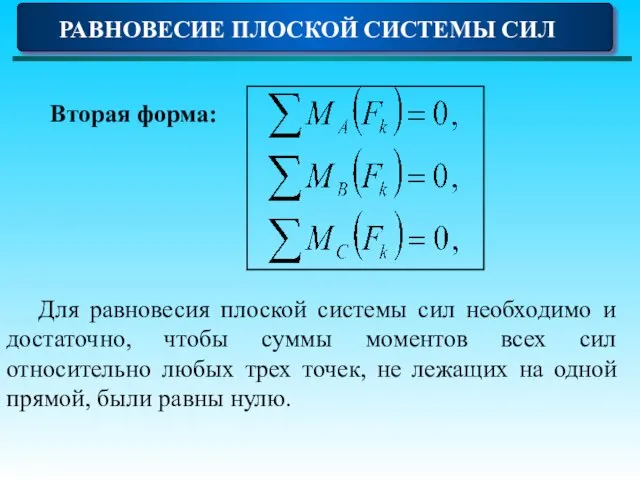
- 17. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ Вторая форма: Для равновесия плоской системы сил необходимо и достаточно, чтобы суммы
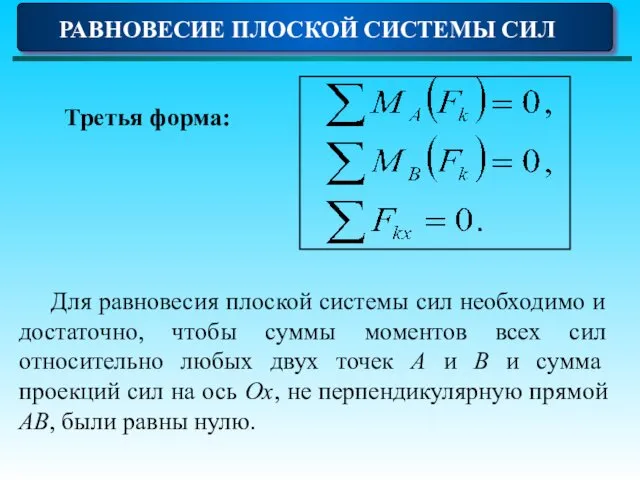
- 18. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ Третья форма: Для равновесия плоской системы сил необходимо и достаточно, чтобы суммы
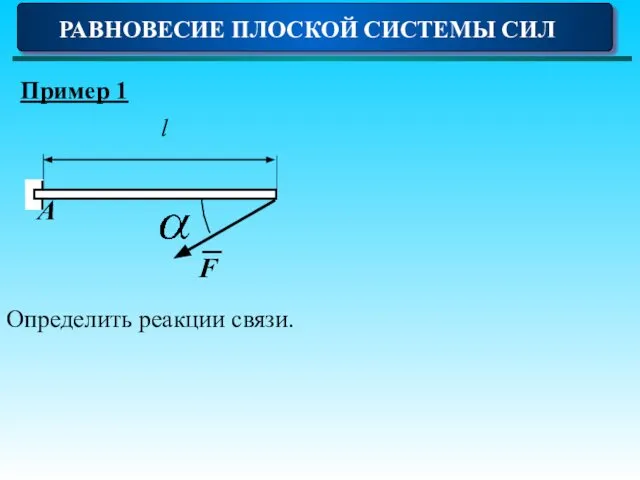
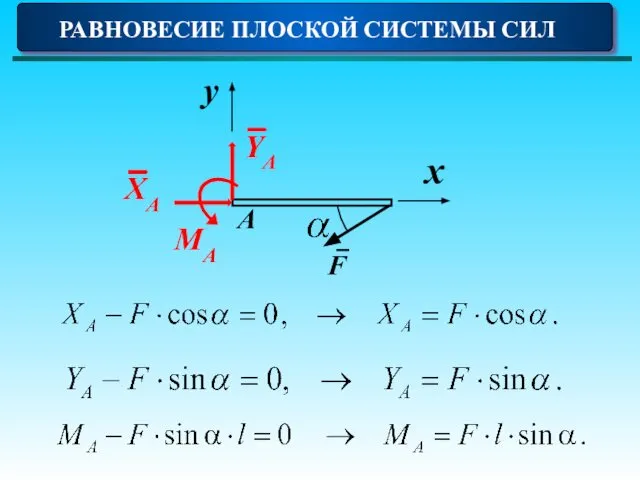
- 19. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ Пример 1 F Определить реакции связи.
- 20. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
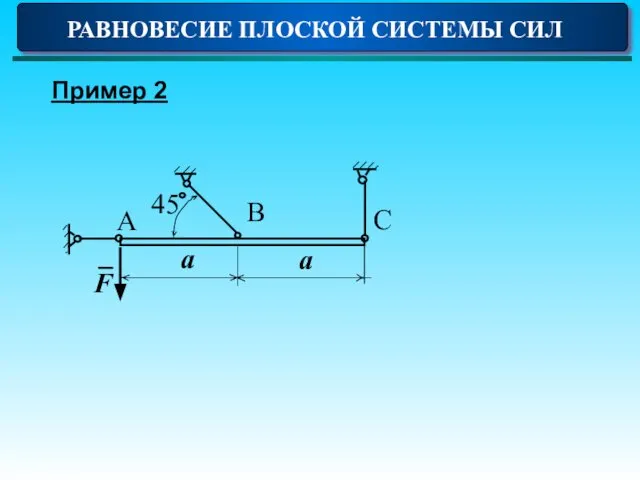
- 21. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ Пример 2 45
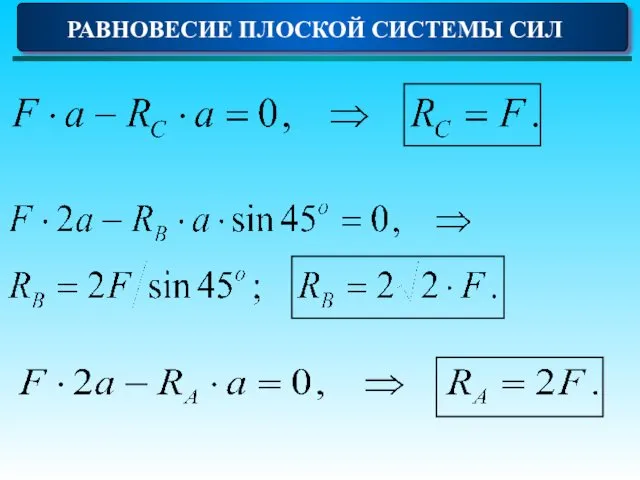
- 22. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ Вторая форма:
- 23. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
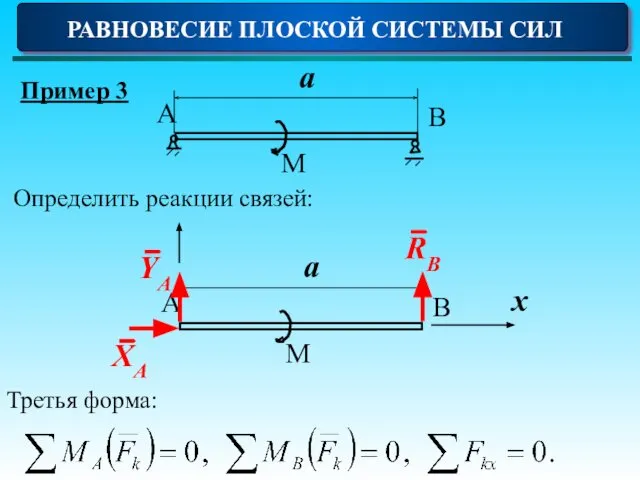
- 24. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ Пример 3 x Третья форма: Определить реакции связей:
- 26. Скачать презентацию
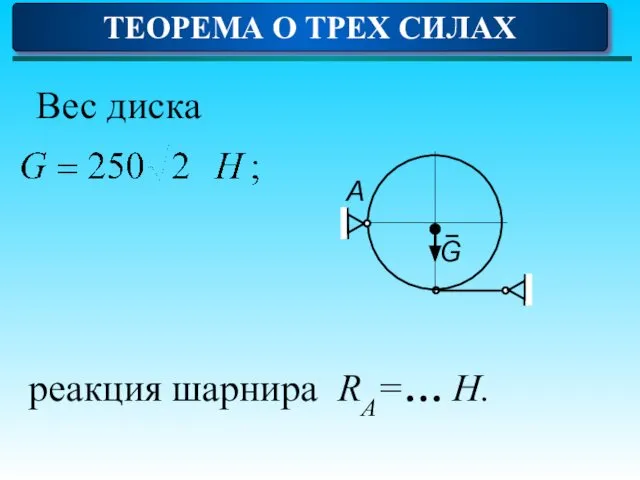
Вес диска
реакция шарнира RA=… H.
ТЕОРЕМА О ТРЕХ СИЛАХ
Вес диска
реакция шарнира RA=… H.
ТЕОРЕМА О ТРЕХ СИЛАХ
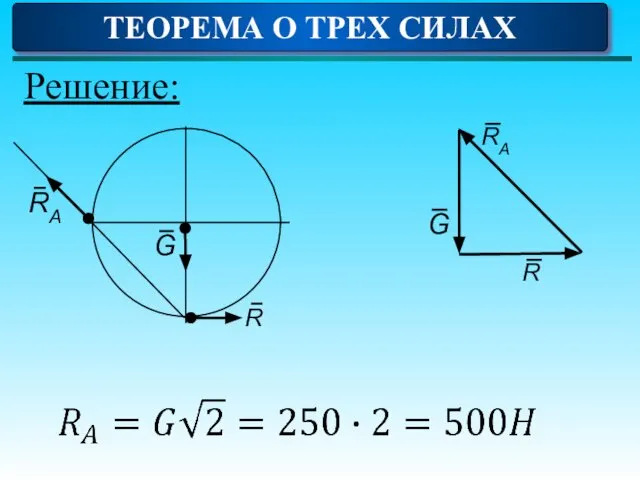
Решение:
ТЕОРЕМА О ТРЕХ СИЛАХ
Решение:
ТЕОРЕМА О ТРЕХ СИЛАХ
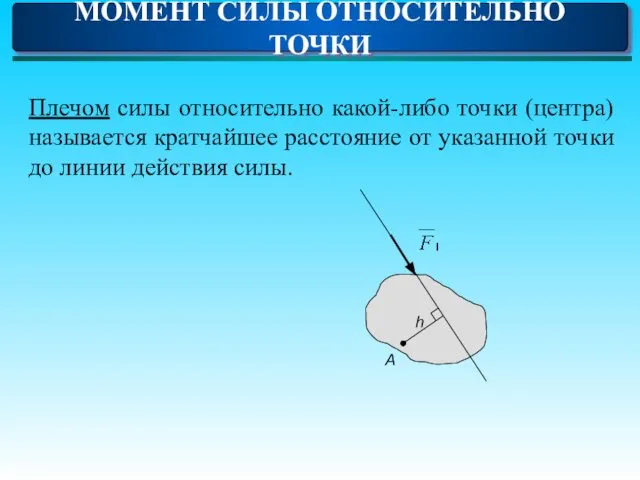
Плечом силы относительно какой-либо точки (центра) называется кратчайшее расстояние от указанной
Плечом силы относительно какой-либо точки (центра) называется кратчайшее расстояние от указанной
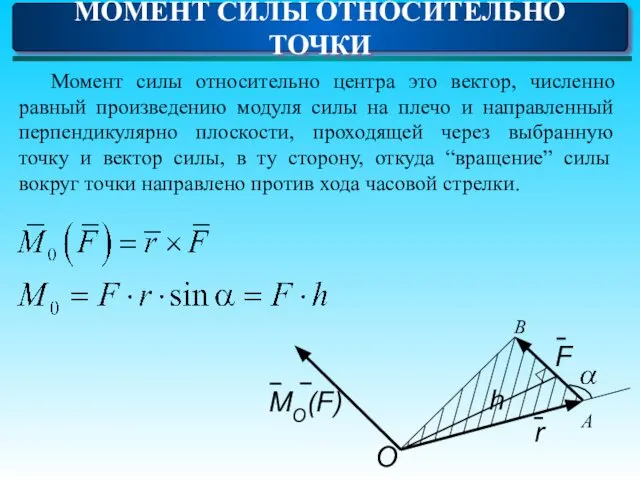
МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ
Момент силы относительно центра это вектор, численно равный
МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ
Момент силы относительно центра это вектор, численно равный
МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ
Алгебраический момент силы
Алгебраический момент силы F относительно центра
МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ
Алгебраический момент силы
Алгебраический момент силы F относительно центра
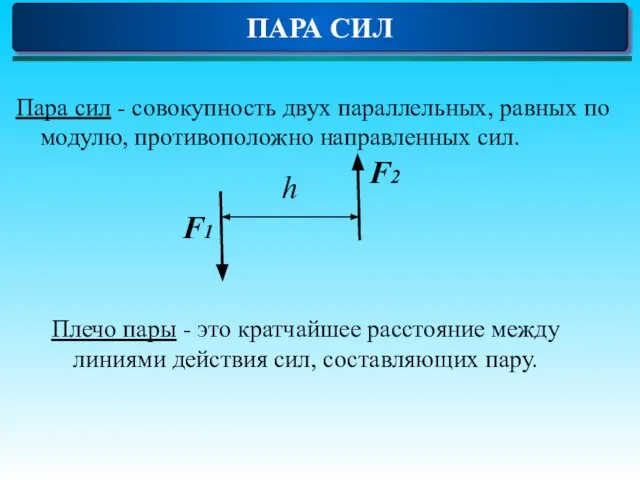
Пара сил - совокупность двух параллельных, равных по модулю, противоположно направленных
Пара сил - совокупность двух параллельных, равных по модулю, противоположно направленных
ПАРА СИЛ
Момент пары сил - это вектор, численно равный произведению модуля
ПАРА СИЛ
Момент пары сил - это вектор, численно равный произведению модуля

ПАРА СИЛ
На плоскости пара сил изображается
Свойства пар
1. Момент пары – свободный
ПАРА СИЛ
На плоскости пара сил изображается
Свойства пар
1. Момент пары – свободный
ПАРА СИЛ
2. Две пары сил с одинаковыми моментами эквивалентны.
3. Если на
ПАРА СИЛ
2. Две пары сил с одинаковыми моментами эквивалентны.
3. Если на
ТЕОРЕМА О ПАРАЛЛЕЛЬНОМ ПЕРЕНОСЕ СИЛЫ
Силу, приложенную к какой-либо точке твердого тела,
ТЕОРЕМА О ПАРАЛЛЕЛЬНОМ ПЕРЕНОСЕ СИЛЫ
Силу, приложенную к какой-либо точке твердого тела,
ОСНОВНАЯ ТЕОРЕМА СТАТИКИ
Главным вектором системы сил называется геометрическая сумма всех сил
ОСНОВНАЯ ТЕОРЕМА СТАТИКИ
Главным вектором системы сил называется геометрическая сумма всех сил
ОСНОВНАЯ ТЕОРЕМА СТАТИКИ
Теорема Пуансо
Всякую пространственную систему сил можно заменить эквивалентной системой,
ОСНОВНАЯ ТЕОРЕМА СТАТИКИ
Теорема Пуансо
Всякую пространственную систему сил можно заменить эквивалентной системой,

ОСНОВНАЯ ТЕОРЕМА СТАТИКИ
А
В
C
O
А
В
C
O
MO
~
, где
;
;
ОСНОВНАЯ ТЕОРЕМА СТАТИКИ
А
В
C
O
А
В
C
O
MO
~
, где
;
;
УСЛОВИЯ РАВНОВЕСИЯ СИСТЕМЫ СИЛ
Для равновесия любой системы сил необходимо и достаточно,
УСЛОВИЯ РАВНОВЕСИЯ СИСТЕМЫ СИЛ
Для равновесия любой системы сил необходимо и достаточно,
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
Плоской называется система сил, как угодно расположенных в
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
Плоской называется система сил, как угодно расположенных в
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
Вторая форма:
Для равновесия плоской системы сил необходимо и
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
Вторая форма:
Для равновесия плоской системы сил необходимо и
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
Третья форма:
Для равновесия плоской системы сил необходимо и
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
Третья форма:
Для равновесия плоской системы сил необходимо и
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
Пример 1
F
Определить реакции связи.
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
Пример 1
F
Определить реакции связи.
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
Пример 2
45
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
Пример 2
45

РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
Вторая форма:
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
Вторая форма:
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
Пример 3
x
Третья форма:
Определить реакции связей:
РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
Пример 3
x
Третья форма:
Определить реакции связей:
 Нікола Тесла Підготував: Штефуца Юрій 11-Б
Нікола Тесла Підготував: Штефуца Юрій 11-Б  Лекция 4. Моделирование технологических процессов. Диффузия
Лекция 4. Моделирование технологических процессов. Диффузия Лазерный измеритель тока ЛИЭТ. Нанотехнологии и лазеры в энергетике
Лазерный измеритель тока ЛИЭТ. Нанотехнологии и лазеры в энергетике Шкала электромагнитных излучений
Шкала электромагнитных излучений Кошка Мурка как объект физических исследований
Кошка Мурка как объект физических исследований Генератор на транзисторе
Генератор на транзисторе Фотоэлектрический эффект
Фотоэлектрический эффект Механічні взаємодії. Сила. Вимірювання сил. Рівнодійна
Механічні взаємодії. Сила. Вимірювання сил. Рівнодійна Ампе́р, Вольт, Закон Ома. Характеристики резисторов
Ампе́р, Вольт, Закон Ома. Характеристики резисторов Инфракрасная спектроскопия
Инфракрасная спектроскопия Реологические модели
Реологические модели Биофизика физикалық және химиялық процестерді зерттейтін ғылым
Биофизика физикалық және химиялық процестерді зерттейтін ғылым Automaty a regularní výrazy. (Lekce 3)
Automaty a regularní výrazy. (Lekce 3) Электротехника и электроника. Спектральный метод анализа электрических цепей. (Лекция 9)
Электротехника и электроника. Спектральный метод анализа электрических цепей. (Лекция 9) Основы физики деления ядер
Основы физики деления ядер Теплопередача. Сложный теплообмен
Теплопередача. Сложный теплообмен Автоматические регуляторы
Автоматические регуляторы Квантовая механика Волновая функция. Лекция 9
Квантовая механика Волновая функция. Лекция 9 Генератор переменного тока
Генератор переменного тока Презентация Сила. Явление тяготения. Сила тяжести
Презентация Сила. Явление тяготения. Сила тяжести Кипение. Удельная теплота парообразования и конденсации
Кипение. Удельная теплота парообразования и конденсации Выталкивающая сила
Выталкивающая сила Презентация по физике Механическая мощность и работа
Презентация по физике Механическая мощность и работа  Закон Ома
Закон Ома Ядерный реактор холодного ядерного синтеза
Ядерный реактор холодного ядерного синтеза Презентация УРОК ФИЗИКИ В 10 КЛАССЕ Сила тяжести. Вес тела. Сила упругости
Презентация УРОК ФИЗИКИ В 10 КЛАССЕ Сила тяжести. Вес тела. Сила упругости Парова турбіна
Парова турбіна  Силы в природе, законы Ньютона. Решение задач
Силы в природе, законы Ньютона. Решение задач