- Презентация "Удаление невидимых линий и поверхностей" - скачать презентации по Информатике

Содержание
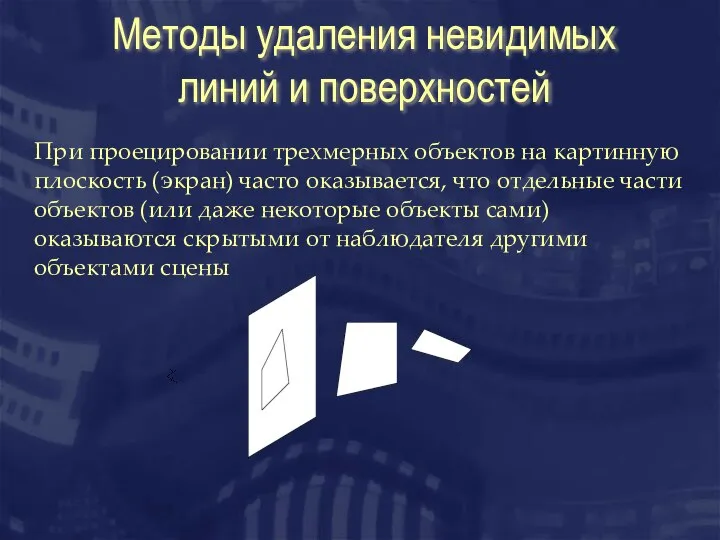
- 2. Методы удаления невидимых линий и поверхностей При проецировании трехмерных объектов на картинную плоскость (экран) часто оказывается,
- 3. Классификация методов удаления невидимых линий и поверхностей Каркасное (wireframe) Сплошное (solid) В пространстве сцены На картинной
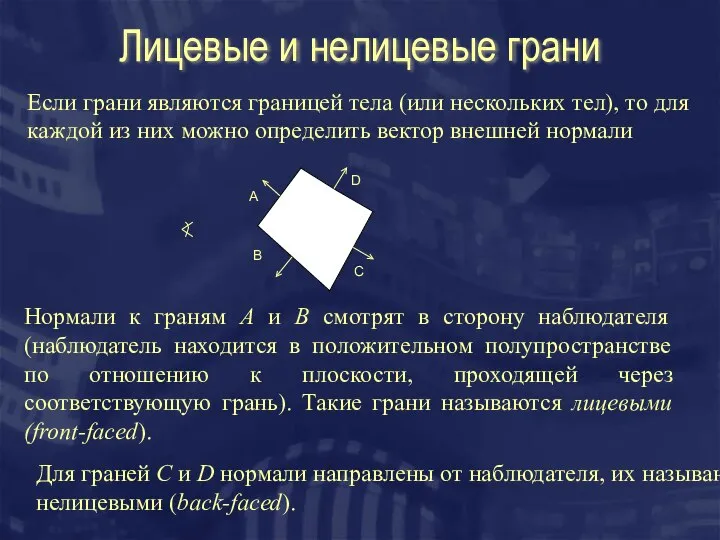
- 4. Лицевые и нелицевые грани Если грани являются границей тела (или нескольких тел), то для каждой из
- 5. Свойства (не)лицевых граней В случае, когда грани являются границей тела (или нескольких тел), то ни одна
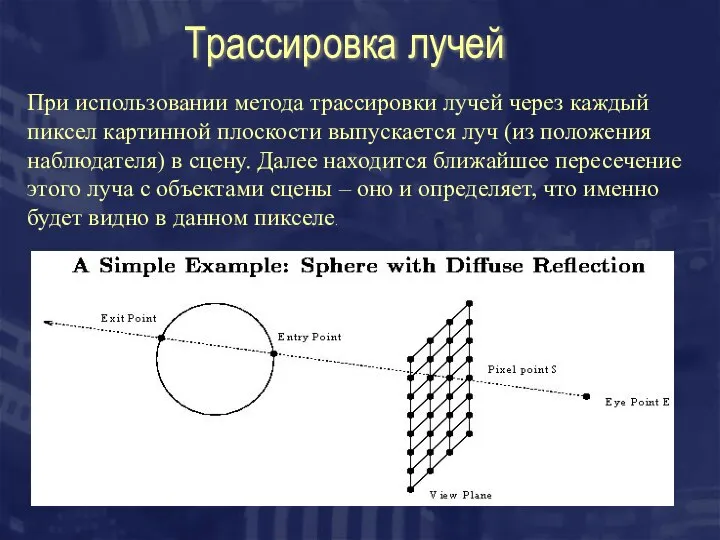
- 6. Трассировка лучей При использовании метода трассировки лучей через каждый пиксел картинной плоскости выпускается луч (из положения
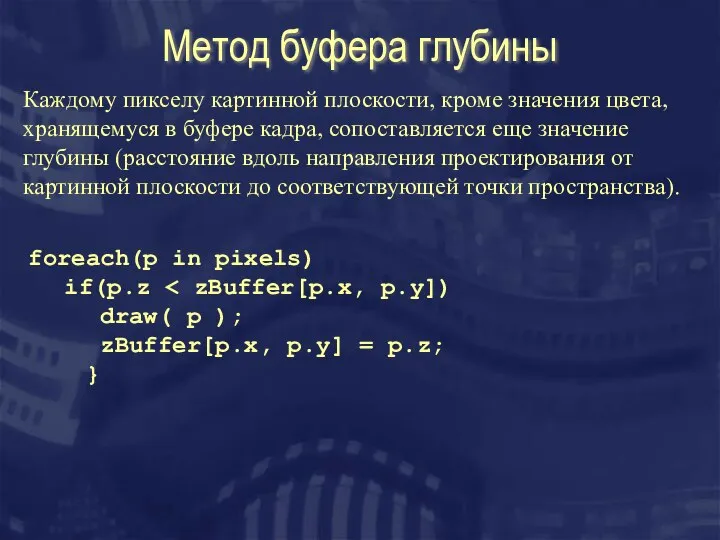
- 7. Метод буфера глубины Каждому пикселу картинной плоскости, кроме значения цвета, хранящемуся в буфере кадра, сопоставляется еще
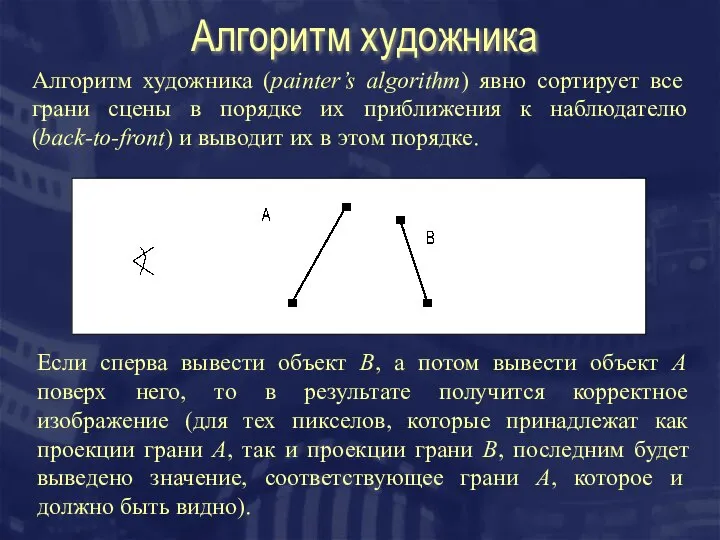
- 8. Алгоритм художника Алгоритм художника (painter’s algorithm) явно сортирует все грани сцены в порядке их приближения к
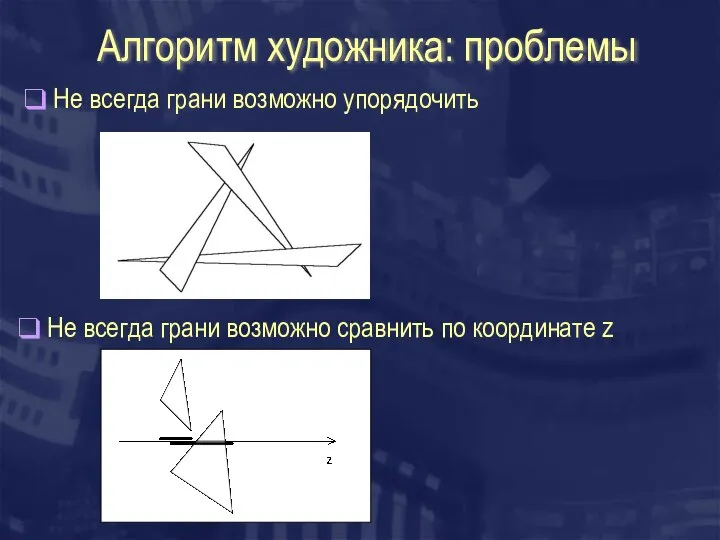
- 9. Алгоритм художника: проблемы Не всегда грани возможно упорядочить Не всегда грани возможно сравнить по координате z
- 10. ё Упорядочивание граней Проведем через одну из граней плоскость и проверим, лежит ли другая грань целиком
- 11. Пять проверок в алгоритме художника 1. Накладываются ли x-габариты мн-ков? 2. Накладываются ли y-габариты мн-ков? 3.
- 12. Метод двоичного разбиения пространства (1/3) Пусть известно, что плоскость π разбивает все грани (объекты) сцены на
- 13. Метод двоичного разбиения пространства (2/3) A B C D C E1 E2 + - + -
- 14. Метод двоичного разбиения пространства (3/3) class BSPNode { Face *face; // Грань объекта BSPNode *positive; BSPNode
- 15. Лицевые и нелицевые грани в OpenGL void glFrontFace(GLenum type); type = {GL_CW|GL_CCW} void glCullFace(GLenum type); type
- 16. Z-буфер Необходимо создать z-буфер glutDisplayMode(GLUT_DEPTH|/*…*/); Перед рисованием сцены очистить z-буфер glClear(GL_DEPTH_BUFFER_BIT|/*…*/); Включить или выключить сравнение z
- 17. Уменьшение количества вершин 1 0 2 3 4 5 GL_TRIANGLE_FAN: 3n vs. 1+n, n>1 1 0
- 19. Скачать презентацию
Методы удаления невидимых линий и поверхностей
При проецировании трехмерных объектов на картинную
Методы удаления невидимых линий и поверхностей
При проецировании трехмерных объектов на картинную
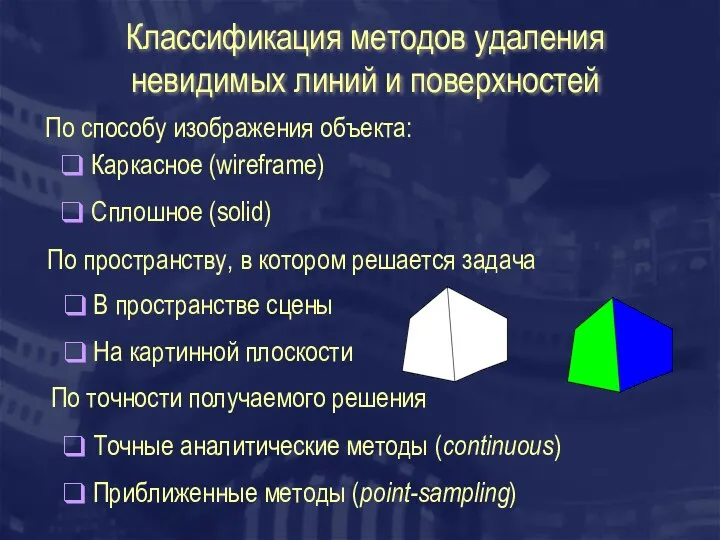
Классификация методов удаления невидимых линий и поверхностей
Каркасное (wireframe)
Сплошное
Классификация методов удаления невидимых линий и поверхностей
Каркасное (wireframe)
Сплошное
Лицевые и нелицевые грани
Если грани являются границей тела (или нескольких тел),
Лицевые и нелицевые грани
Если грани являются границей тела (или нескольких тел),
Свойства (не)лицевых граней
В случае, когда грани являются границей тела (или нескольких
Свойства (не)лицевых граней
В случае, когда грани являются границей тела (или нескольких
Трассировка лучей
При использовании метода трассировки лучей через каждый пиксел картинной плоскости
Трассировка лучей
При использовании метода трассировки лучей через каждый пиксел картинной плоскости
Метод буфера глубины
Каждому пикселу картинной плоскости, кроме значения цвета, хранящемуся в
Метод буфера глубины
Каждому пикселу картинной плоскости, кроме значения цвета, хранящемуся в
Алгоритм художника
Алгоритм художника (painter’s algorithm) явно сортирует все грани сцены в
Алгоритм художника
Алгоритм художника (painter’s algorithm) явно сортирует все грани сцены в
Алгоритм художника: проблемы
Не всегда грани возможно упорядочить
Не всегда грани
Алгоритм художника: проблемы
Не всегда грани возможно упорядочить
Не всегда грани
ё
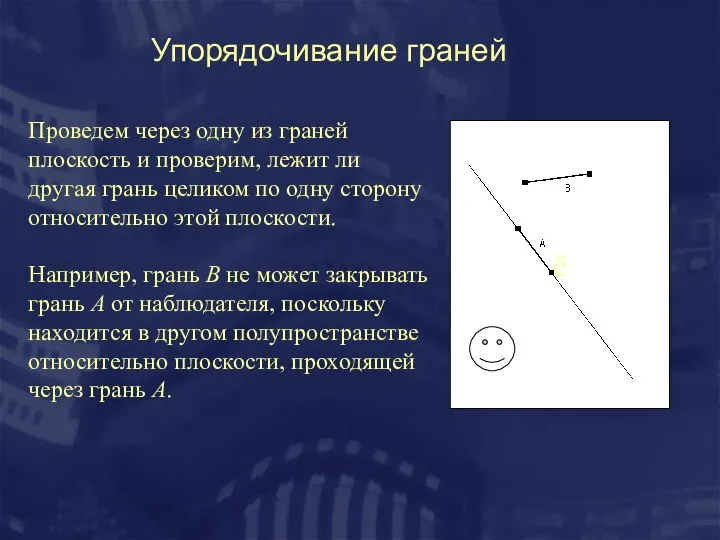
Упорядочивание граней
Проведем через одну из граней плоскость и проверим, лежит ли
ё
Упорядочивание граней
Проведем через одну из граней плоскость и проверим, лежит ли
Пять проверок в алгоритме художника
1. Накладываются ли x-габариты мн-ков?
2. Накладываются ли
Пять проверок в алгоритме художника
1. Накладываются ли x-габариты мн-ков?
2. Накладываются ли
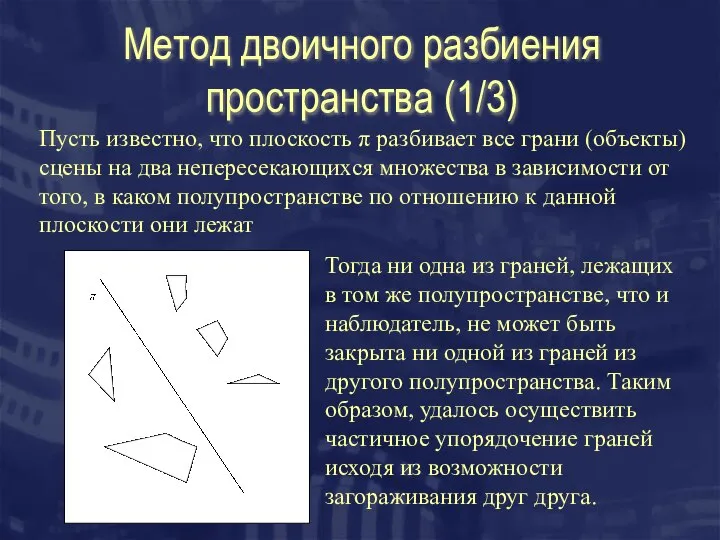
Метод двоичного разбиения пространства (1/3)
Пусть известно, что плоскость π разбивает все
Метод двоичного разбиения пространства (1/3)
Пусть известно, что плоскость π разбивает все
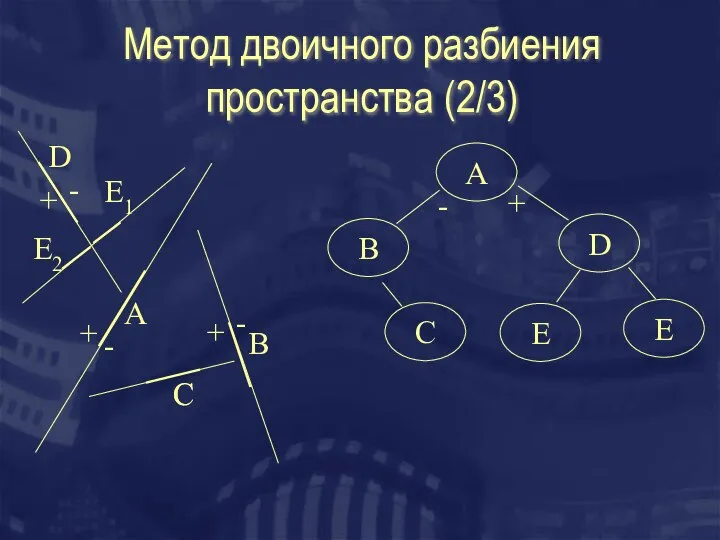
Метод двоичного разбиения пространства (2/3)
A
B
C
D
C
E1
E2
+
-
+
-
+
-
A
B
C
D
E
E
+
-
Метод двоичного разбиения пространства (2/3)
A
B
C
D
C
E1
E2
+
-
+
-
+
-
A
B
C
D
E
E
+
-
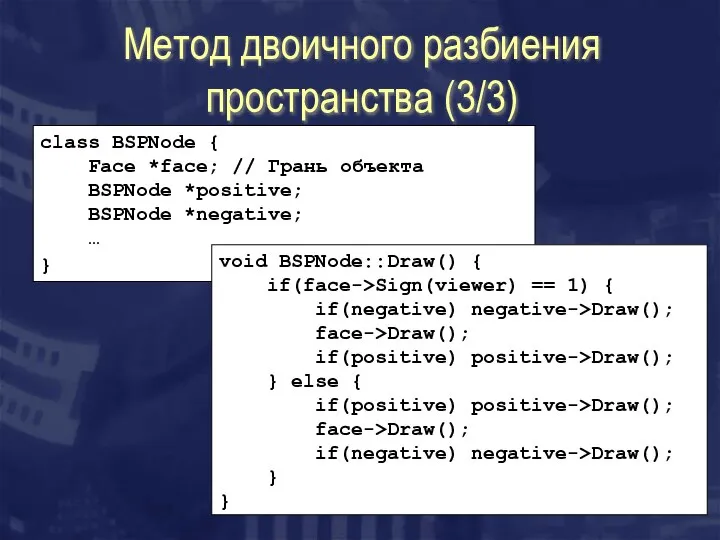
Метод двоичного разбиения пространства (3/3)
class BSPNode {
Face *face; // Грань
Метод двоичного разбиения пространства (3/3)
class BSPNode {
Face *face; // Грань
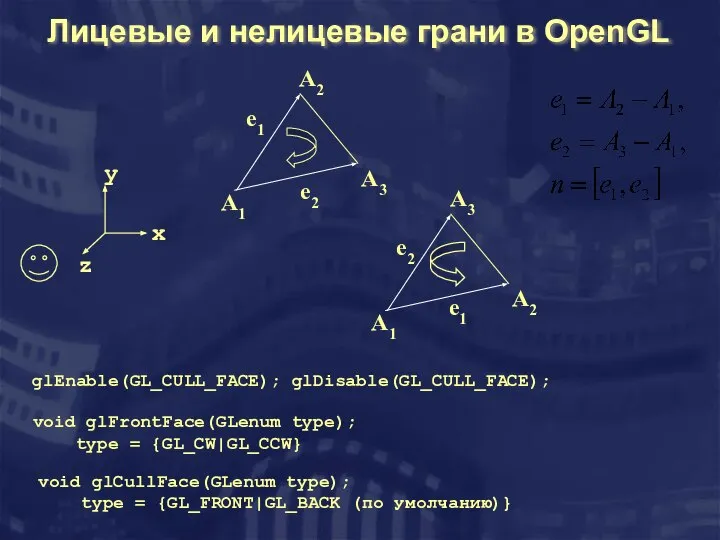
Лицевые и нелицевые грани в OpenGL
void glFrontFace(GLenum type);
type = {GL_CW|GL_CCW}
void
Лицевые и нелицевые грани в OpenGL
void glFrontFace(GLenum type);
type = {GL_CW|GL_CCW}
void
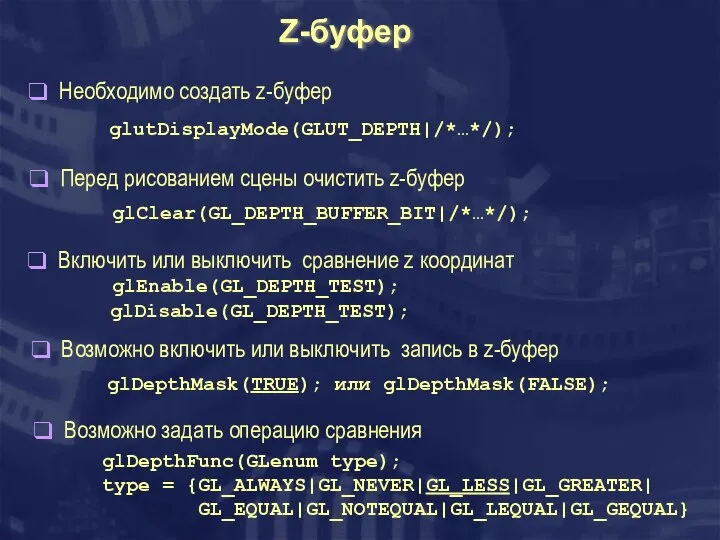
Z-буфер
Необходимо создать z-буфер
glutDisplayMode(GLUT_DEPTH|/*…*/);
Перед рисованием сцены очистить z-буфер
glClear(GL_DEPTH_BUFFER_BIT|/*…*/);
Включить или
Z-буфер
Необходимо создать z-буфер
glutDisplayMode(GLUT_DEPTH|/*…*/);
Перед рисованием сцены очистить z-буфер
glClear(GL_DEPTH_BUFFER_BIT|/*…*/);
Включить или
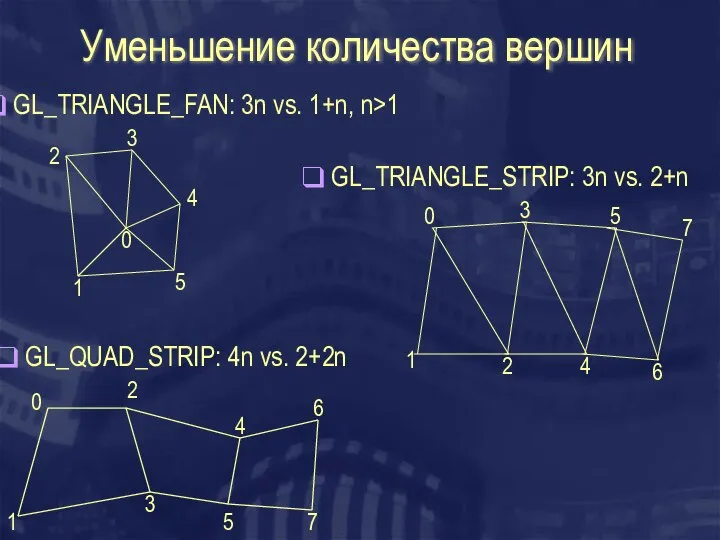
Уменьшение количества вершин
1
0
2
3
4
5
GL_TRIANGLE_FAN: 3n vs. 1+n, n>1
1
0
2
3
4
5
6
7
GL_TRIANGLE_STRIP: 3n vs.
Уменьшение количества вершин
1
0
2
3
4
5
GL_TRIANGLE_FAN: 3n vs. 1+n, n>1
1
0
2
3
4
5
6
7
GL_TRIANGLE_STRIP: 3n vs.
 Комбинаторные задачи. Комбинаторика. Г. ЕКАТЕРИНБУРГ МОУ-ГИМНАЗИЯ № 13 УЧИТЕЛЬ АНКИНА Т.С.
Комбинаторные задачи. Комбинаторика. Г. ЕКАТЕРИНБУРГ МОУ-ГИМНАЗИЯ № 13 УЧИТЕЛЬ АНКИНА Т.С. Информационно-технический проект
Информационно-технический проект Отношения между понятиями
Отношения между понятиями Динамические игры на pascal (TRASHKILLER)
Динамические игры на pascal (TRASHKILLER) Прием Карман
Прием Карман Презентация "Биография создателя Microsoft - Билла Гейтса"
Презентация "Биография создателя Microsoft - Билла Гейтса" SEO-практик: 10 шагов к результату. Шаг 10. Постанализ и отслеживание результатов. Стратегия продвижения
SEO-практик: 10 шагов к результату. Шаг 10. Постанализ и отслеживание результатов. Стратегия продвижения Разработка защиты информации в кабинете руководителя юридической компании ИП Газизов Ш.Х
Разработка защиты информации в кабинете руководителя юридической компании ИП Газизов Ш.Х Информационная грамотность
Информационная грамотность Operating System. Types
Operating System. Types Аттестационная работа. Внеурочный курс 3D - моделирования и развитие инновационных технологий в образовании
Аттестационная работа. Внеурочный курс 3D - моделирования и развитие инновационных технологий в образовании Урок информатики 5 класс
Урок информатики 5 класс Работа команды logo-3
Работа команды logo-3 Презентация по информатике Устройство и ввод информации
Презентация по информатике Устройство и ввод информации  Классификация ОС
Классификация ОС Цветовые модели и типы растровых изображений
Цветовые модели и типы растровых изображений Повышение эффективности управления почтовым отделением путем внедрения специализированной информационной системы
Повышение эффективности управления почтовым отделением путем внедрения специализированной информационной системы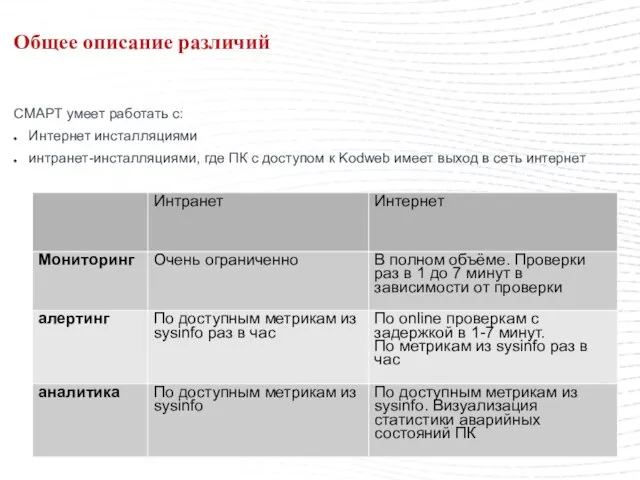 Общее описание различий СМАРТ
Общее описание различий СМАРТ Влияние компьютера на психику человека
Влияние компьютера на психику человека Обработка массивов Сортировка
Обработка массивов Сортировка Оформление документов в текстовом редакторе Word (форматирование символов)
Оформление документов в текстовом редакторе Word (форматирование символов) Приветствую Вас на курсе Java!
Приветствую Вас на курсе Java! Представление информации в памяти компьютера
Представление информации в памяти компьютера Процессор и оперативная память. 3/25/15
Процессор и оперативная память. 3/25/15 Социальные сети (1 уровень)
Социальные сети (1 уровень) Информационные технологии проектирования
Информационные технологии проектирования Создание Web-страниц на языке HTML
Создание Web-страниц на языке HTML Emailing etiquette
Emailing etiquette