- Introduction to artificial intelligence А* Search

Содержание
- 2. Best-First Search Review Advantages Takes advantage of domain information to guide search Greedy advance to the
- 3. The A* Algorithm Consider the overall cost of the solution. f(n) = g(n) + h(n) where
- 4. The A* Algorithm A*-Search(initial-test) ;; functions cost, h, succ, and GoalTest are defined open ;; (state,
- 5. A* Search: Example Travel: h(n) = distance(n, goal) 71 142 85 90 101 97 99 140
- 6. A* Search : Example
- 7. Admissible Heuristics we also require h be admissible: a heuristic h is admissible if h(n) where
- 8. Optimality of A* Let us assume that f is non-decreasing along each path if not, simply
- 9. Completeness of A* Suppose there is a goal state G with path cost f* Intuitively: since
- 10. UCS, BFS, Best-First, and A* f = g + h => A* Search h = 0
- 11. Road Map Problem s g h(s) n h(n) n’ h(n’) g(n’)
- 12. 8-queens State contains 8 queens on the board Successor function returns all states generated by moving
- 13. Heuristics : 8 Puzzle
- 14. 8 Puzzle Reachable state : 9!/2 = 181,440 Use of heuristics h1 : # of tiles
- 15. Effect of Heuristic Accuracy on Performance Well-designed heuristic have its branch close to 1 h2 dominates
- 17. A* summary Completeness provided finite branching factor and finite cost per operator Optimality provided we use
- 18. Relax Optimality Goals: Minimizing search cost Satisficing solution, i.e. bounded error in the solution f(s) =
- 19. Iterative Deepening A* Goals A storage efficient algorithm that we can use in practice Still complete
- 20. IDA* Algorithm IDA* (state,h) returns solution f-limit loop do solution, f-limit ? DFS-Contour(state, f-limit) if solution
- 21. IDA* Properties Complete: if shortest path fits into memory Optimal: if shortest optimal path fits into
- 23. Скачать презентацию
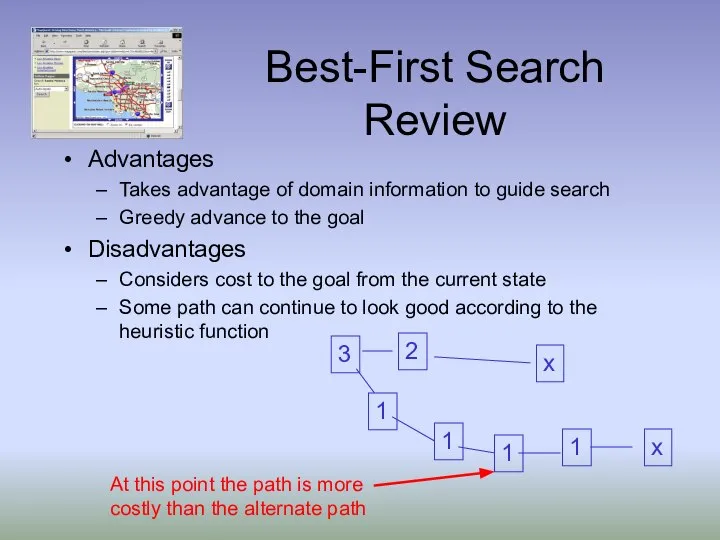
Best-First Search Review
Advantages
Takes advantage of domain information to guide search
Greedy advance
Best-First Search Review
Advantages
Takes advantage of domain information to guide search
Greedy advance
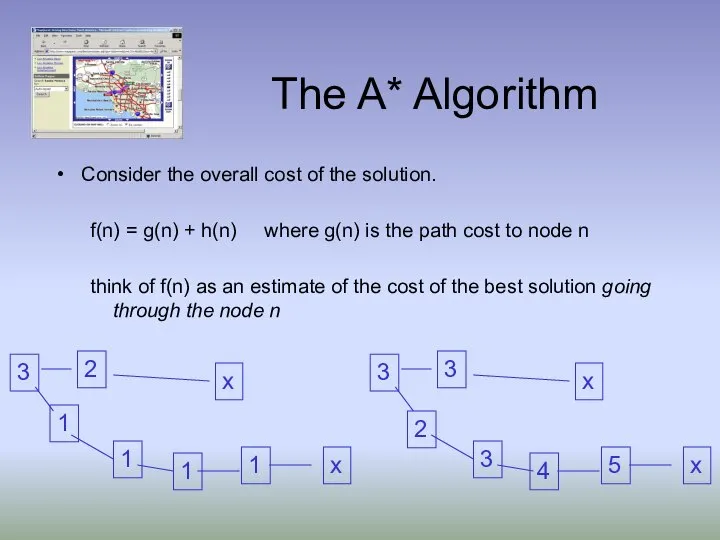
The A* Algorithm
Consider the overall cost of the solution.
f(n) = g(n)
The A* Algorithm
Consider the overall cost of the solution.
f(n) = g(n)
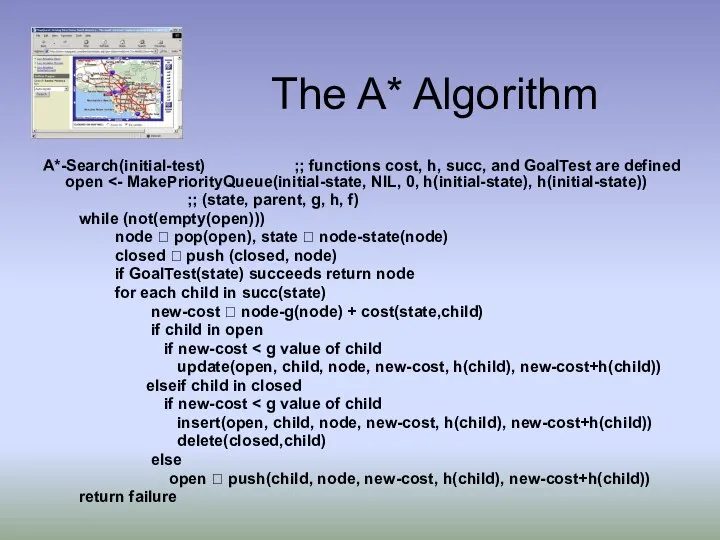
The A* Algorithm
A*-Search(initial-test) ;; functions cost, h, succ, and GoalTest are
The A* Algorithm
A*-Search(initial-test) ;; functions cost, h, succ, and GoalTest are
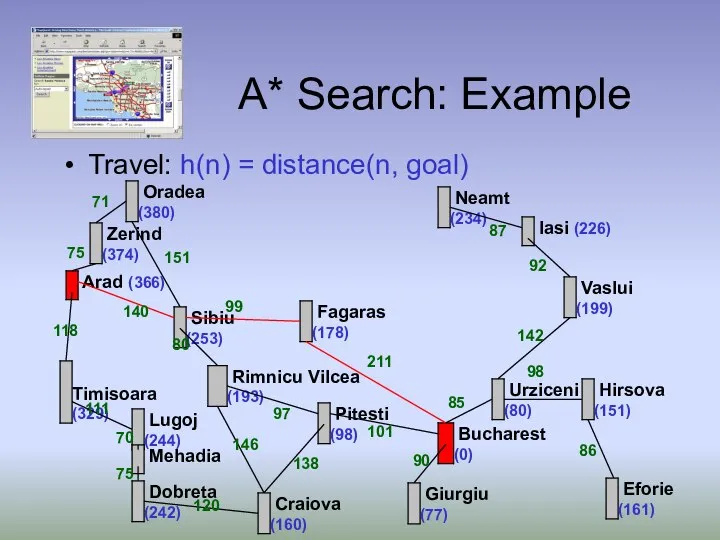
A* Search: Example
Travel: h(n) = distance(n, goal)
71
142
85
90
101
97
99
140
138
146
120
75
70
111
118
75
211
151
86
98
92
87
80
A* Search: Example
Travel: h(n) = distance(n, goal)
71
142
85
90
101
97
99
140
138
146
120
75
70
111
118
75
211
151
86
98
92
87
80
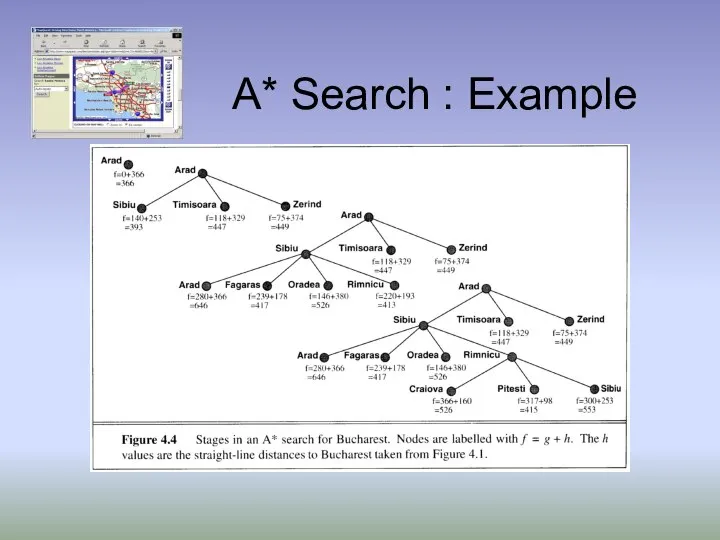
A* Search : Example
A* Search : Example
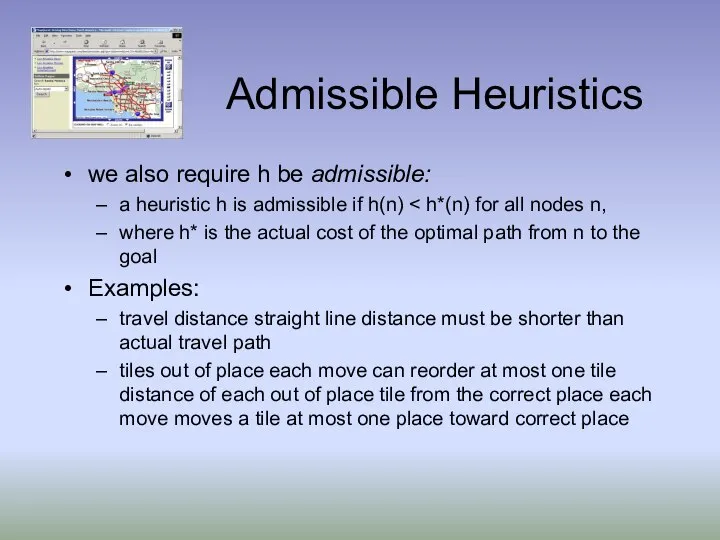
Admissible Heuristics
we also require h be admissible:
a heuristic h is
Admissible Heuristics
we also require h be admissible:
a heuristic h is
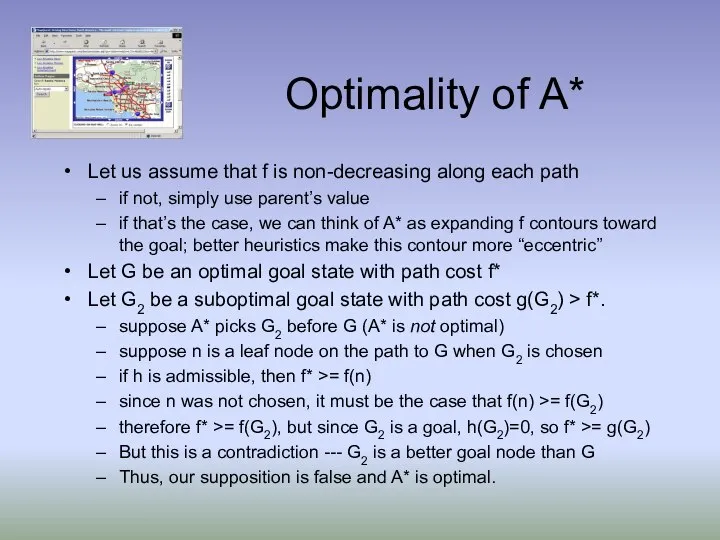
Optimality of A*
Let us assume that f is non-decreasing along each
Optimality of A*
Let us assume that f is non-decreasing along each
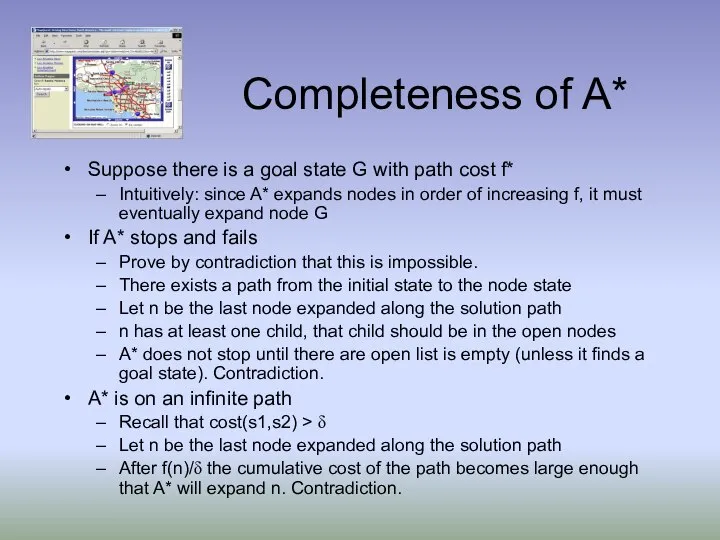
Completeness of A*
Suppose there is a goal state G with path
Completeness of A*
Suppose there is a goal state G with path
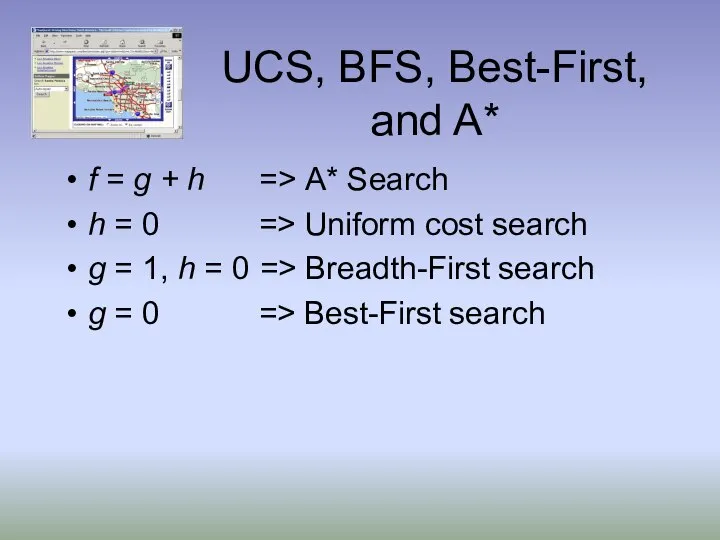
UCS, BFS, Best-First, and A*
f = g + h => A*
UCS, BFS, Best-First, and A*
f = g + h => A*
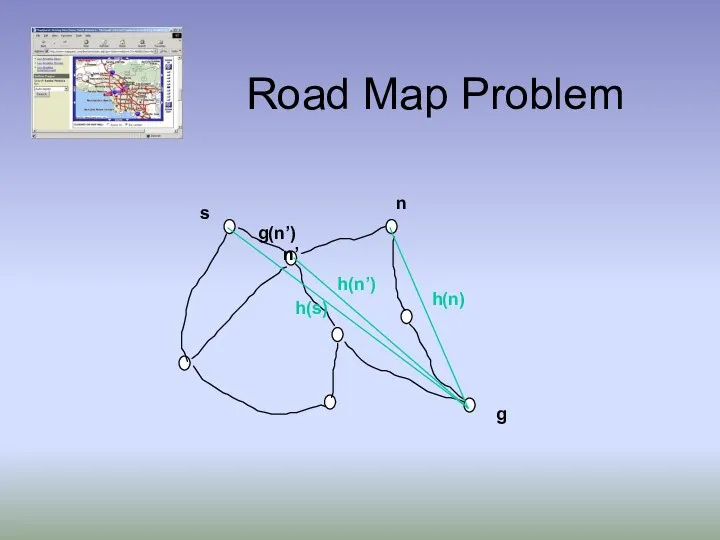
Road Map Problem
s
g
h(s)
n
h(n)
n’
h(n’)
g(n’)
Road Map Problem
s
g
h(s)
n
h(n)
n’
h(n’)
g(n’)
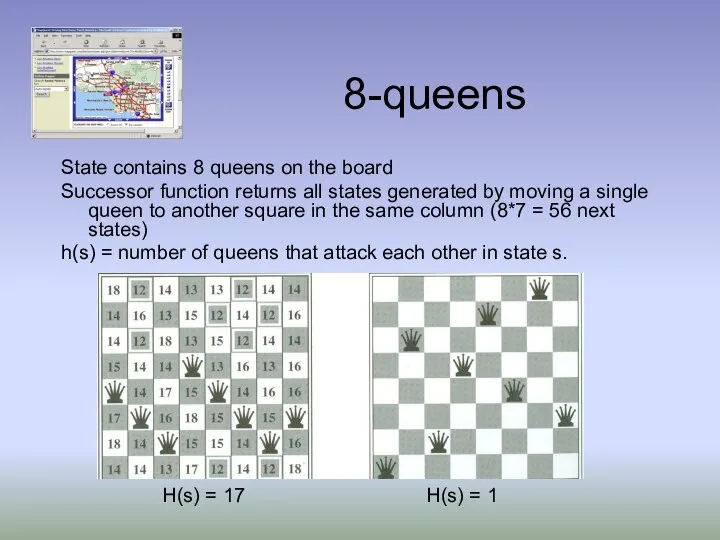
8-queens
State contains 8 queens on the board
Successor function returns all states
8-queens
State contains 8 queens on the board
Successor function returns all states
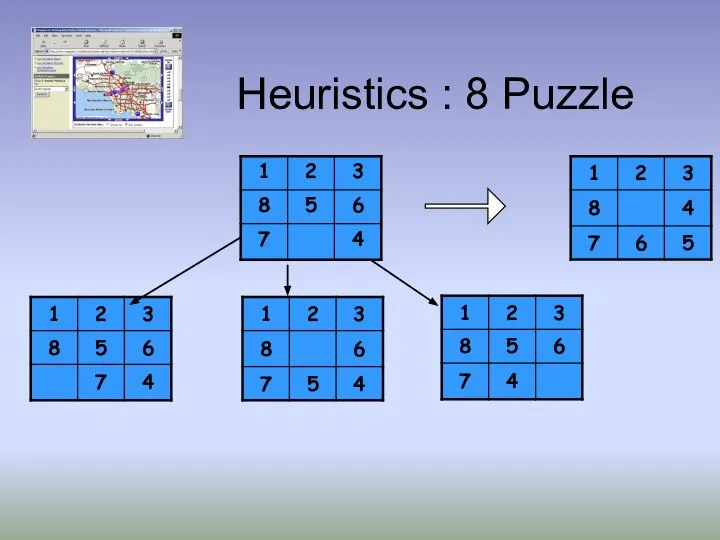
Heuristics : 8 Puzzle
Heuristics : 8 Puzzle
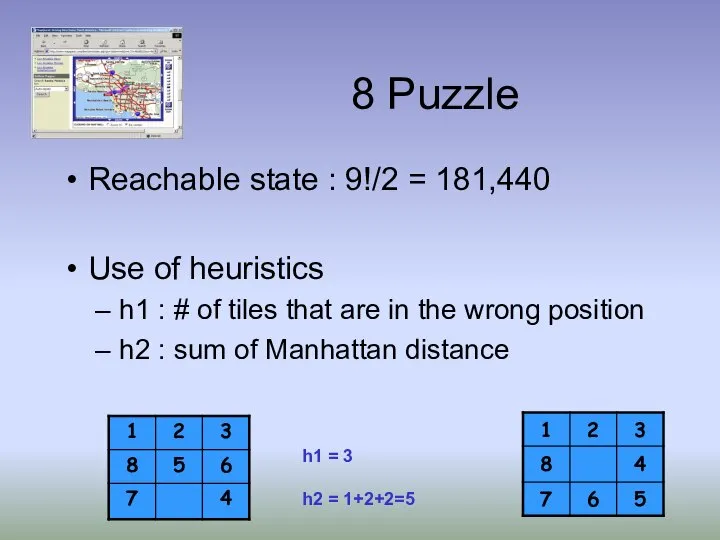
8 Puzzle
Reachable state : 9!/2 = 181,440
Use of heuristics
h1 :
8 Puzzle
Reachable state : 9!/2 = 181,440
Use of heuristics
h1 :
Effect of Heuristic Accuracy on Performance
Well-designed heuristic have its branch close
Effect of Heuristic Accuracy on Performance
Well-designed heuristic have its branch close
A* summary
Completeness
provided finite branching factor and finite cost per operator
A* summary
Completeness
provided finite branching factor and finite cost per operator
Relax Optimality
Goals:
Minimizing search cost
Satisficing solution, i.e. bounded error in the solution
f(s)
Relax Optimality
Goals:
Minimizing search cost
Satisficing solution, i.e. bounded error in the solution
f(s)
Iterative Deepening A*
Goals
A storage efficient algorithm that we can use in
Iterative Deepening A*
Goals
A storage efficient algorithm that we can use in
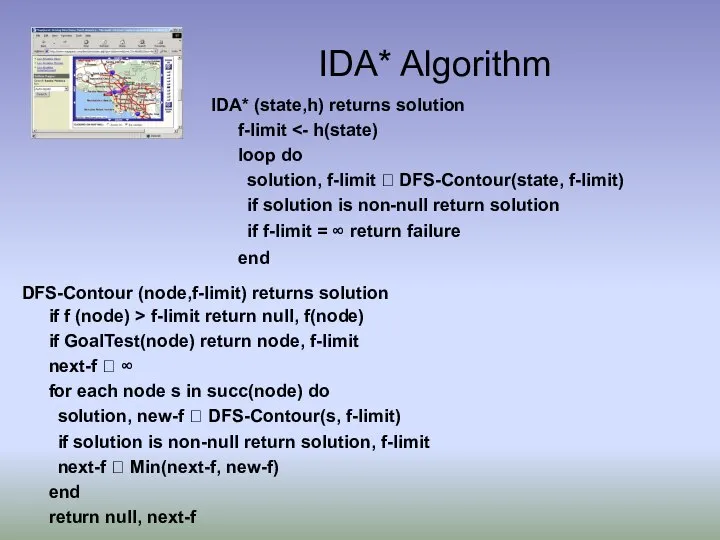
IDA* Algorithm
IDA* (state,h) returns solution
f-limit <- h(state)
loop do
solution, f-limit ? DFS-Contour(state,
IDA* Algorithm
IDA* (state,h) returns solution
f-limit <- h(state)
loop do
solution, f-limit ? DFS-Contour(state,
IDA* Properties
Complete:
if shortest path fits into memory
Optimal:
if shortest optimal path fits
IDA* Properties
Complete:
if shortest path fits into memory
Optimal:
if shortest optimal path fits
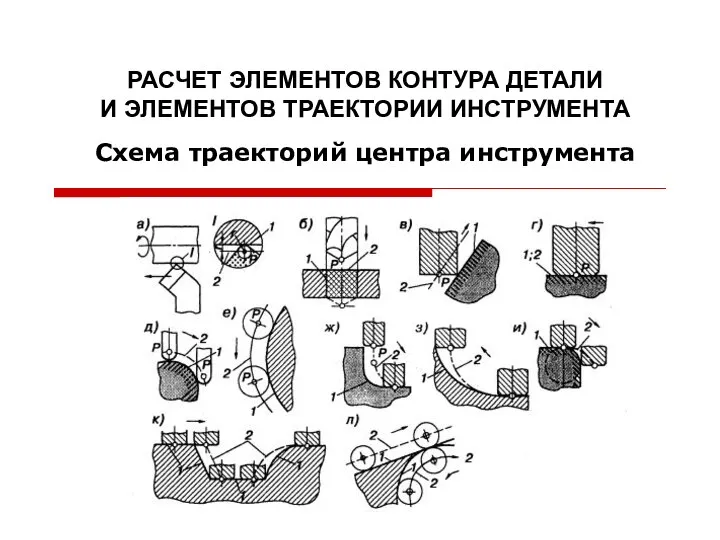 Расчет элементов контура детали и элементов траектории инструмента. Схема траекторий центра инструмента (02)
Расчет элементов контура детали и элементов траектории инструмента. Схема траекторий центра инструмента (02) Сводная отчетность
Сводная отчетность Промышленные сети
Промышленные сети Предмет: информатика Класс: 10-11 Тема урока: Оптимизационное моделирование в электронных таблицах Excel 2007 Крячко София Викторовна У
Предмет: информатика Класс: 10-11 Тема урока: Оптимизационное моделирование в электронных таблицах Excel 2007 Крячко София Викторовна У Представление и кодирование информации с помощью знаковых систем
Представление и кодирование информации с помощью знаковых систем InsureTech как драйвер развития страхового рынка
InsureTech как драйвер развития страхового рынка Что стало с читами в видеоиграх
Что стало с читами в видеоиграх Процеси. Process Control Block і контекст процесу
Процеси. Process Control Block і контекст процесу Электронные таблицы в медицинской статистике
Электронные таблицы в медицинской статистике Информационно-технический проект
Информационно-технический проект Условный оператор. Инструкция if. Множественное ветвление
Условный оператор. Инструкция if. Множественное ветвление Всемирная паутина, как информационное хранилище
Всемирная паутина, как информационное хранилище Алгоритмы
Алгоритмы Информационные технологии в учебном процессе
Информационные технологии в учебном процессе Рекламная и декоративная светотехника
Рекламная и декоративная светотехника Типы алгоритмов. Линейный алгоритм
Типы алгоритмов. Линейный алгоритм Random.Randint
Random.Randint Конструктор. Офисный ПК. Игровой ПК
Конструктор. Офисный ПК. Игровой ПК Умные города на примере Торонто и Нью-Йорка
Умные города на примере Торонто и Нью-Йорка Передача заданий между смежными отделами в электронном виде при проектировании в ПК AVEVA
Передача заданий между смежными отделами в электронном виде при проектировании в ПК AVEVA CSS-селекторы
CSS-селекторы Учебный курс Хранилища данных Лекция 1 Понятия о хранилищах Лекции читает Кандидат технических наук, доцент Перминов Генн
Учебный курс Хранилища данных Лекция 1 Понятия о хранилищах Лекции читает Кандидат технических наук, доцент Перминов Генн Порядок участия в торгах на электронных площадках
Порядок участия в торгах на электронных площадках Стандартизація та сертифікація інформаційних управляючих систем
Стандартизація та сертифікація інформаційних управляючих систем Тема: Решение задач с условным оператором. Цели: Научить решать задачи с условным оператором. Развивать умения составлять п
Тема: Решение задач с условным оператором. Цели: Научить решать задачи с условным оператором. Развивать умения составлять п Введение в UML. UML. (Unified Modeling Language) – унифицированный язык моделирования
Введение в UML. UML. (Unified Modeling Language) – унифицированный язык моделирования Алгоритмическая структура «цикл»
Алгоритмическая структура «цикл» Первый Бит
Первый Бит