- Движение и сопряжение

Содержание
- 2. Содержание Движение а) Отображение плоскости на себя б) Понятие движения в) Осевая симметрия г) Параллельный перенос
- 3. Движение ?Отображение плоскости на себя Любая точка плоскости оказывается сопоставлена некоторой точке. Говорят, что дано отображение
- 4. ? Понятие движения Любое отображение, сохраняющее расстояния между точками называется движением. Таким образом: Движение плоскости –
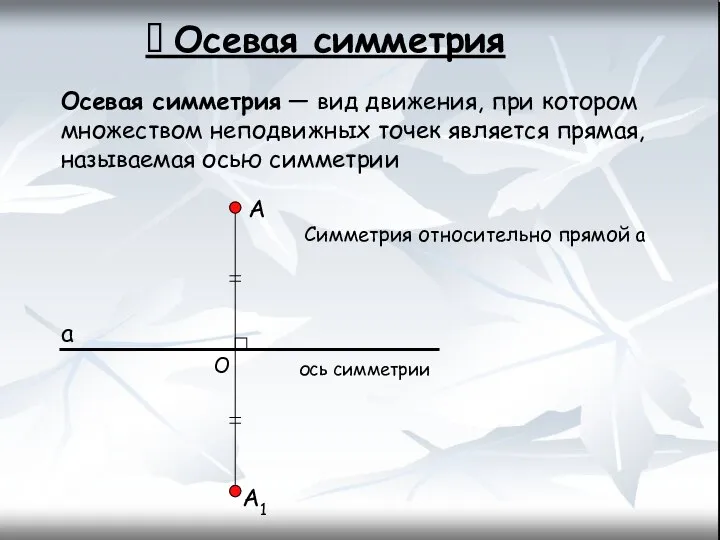
- 5. ? Осевая симметрия a А А1 ось симметрии Осевая симметрия — вид движения, при котором множеством
- 6. Симметрия относительно точки: О – фиксированная точка A – произвольная точка О А А1
- 7. ? Параллельный перенос Параллельным переносом на вектор а называется отображение плоскости на себя при котором каждая
- 8. Параллельный перенос треугольника на заданный вектор а а А В С С1 А1 В1 Доказательство: 1)
- 9. Параллельный перенос окружности на заданный вектор а О а О1 Доказательство: Докажем, что окружность О1 =
- 10. Сопряжение Сопряжением называют плавный переход одной линии в другую. Для того чтобы построить сопряжение, нужно найти
- 11. 1. Сопряжение прямого угла О – центр сопряжения R – произвольная величина A, B – точки
- 12. 2. Сопряжение острого угла О – центр сопряжения A, B – точки сопряжения R – произвольная
- 13. 3. Сопряжение тупого угла О – центр сопряжения A, B – точки сопряжения R – произвольная
- 14. 4. Сопряжение параллельных прямых линий О – центр сопряжения A, B – точки сопряжения R –
- 16. Скачать презентацию
Содержание
Движение
а) Отображение плоскости на себя
б) Понятие движения
в) Осевая симметрия
г)
Содержание
Движение
а) Отображение плоскости на себя
б) Понятие движения
в) Осевая симметрия
г)

Движение
?Отображение плоскости на себя
Любая точка плоскости оказывается сопоставлена некоторой точке. Говорят,
Движение
?Отображение плоскости на себя
Любая точка плоскости оказывается сопоставлена некоторой точке. Говорят,
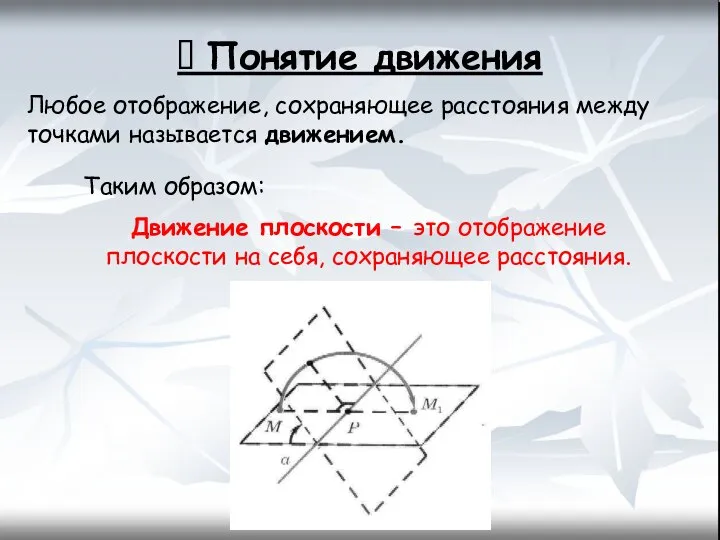
? Понятие движения
Любое отображение, сохраняющее расстояния между точками называется движением.
Таким образом:
? Понятие движения
Любое отображение, сохраняющее расстояния между точками называется движением.
Таким образом:
? Осевая симметрия
a
А
А1
ось симметрии
Осевая симметрия — вид движения, при котором множеством неподвижных точек является прямая,
? Осевая симметрия
a
А
А1
ось симметрии
Осевая симметрия — вид движения, при котором множеством неподвижных точек является прямая,
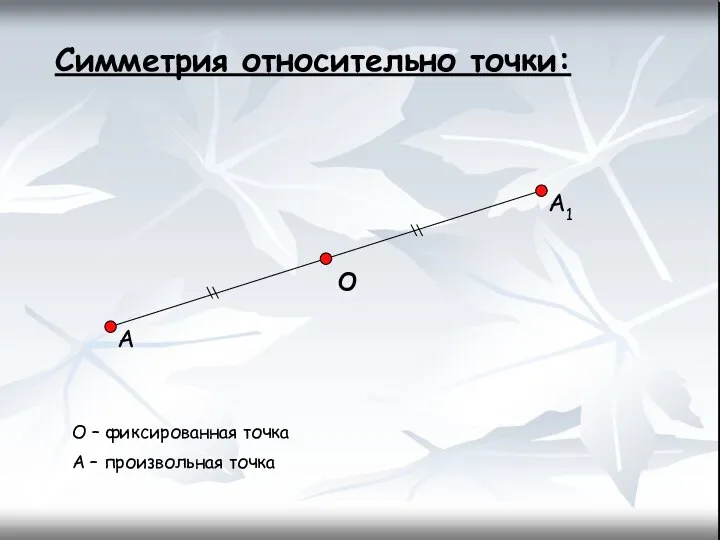
Симметрия относительно точки:
О – фиксированная точка
A – произвольная точка
О
А
А1
Симметрия относительно точки:
О – фиксированная точка
A – произвольная точка
О
А
А1

? Параллельный перенос
Параллельным переносом на вектор а называется отображение плоскости на
? Параллельный перенос
Параллельным переносом на вектор а называется отображение плоскости на
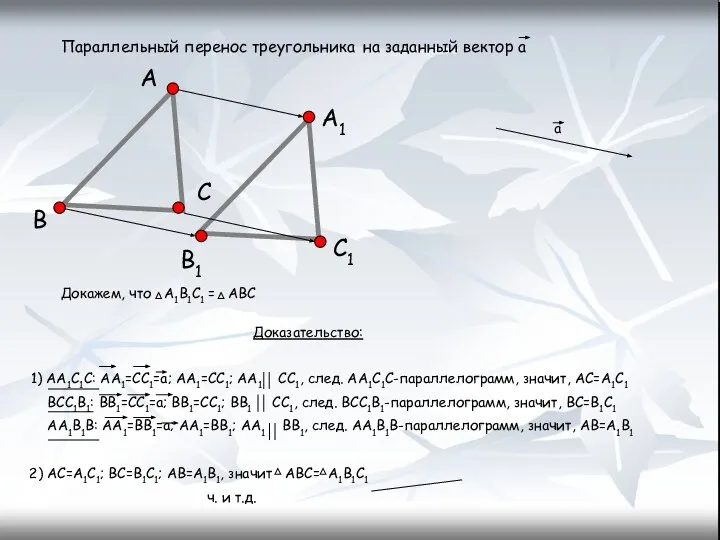
Параллельный перенос треугольника на заданный вектор а
а
А
В
С
С1
А1
В1
Доказательство:
1) АА1С1С: АА1=СС1=а; АА1=СС1;
Параллельный перенос треугольника на заданный вектор а
а
А
В
С
С1
А1
В1
Доказательство:
1) АА1С1С: АА1=СС1=а; АА1=СС1;
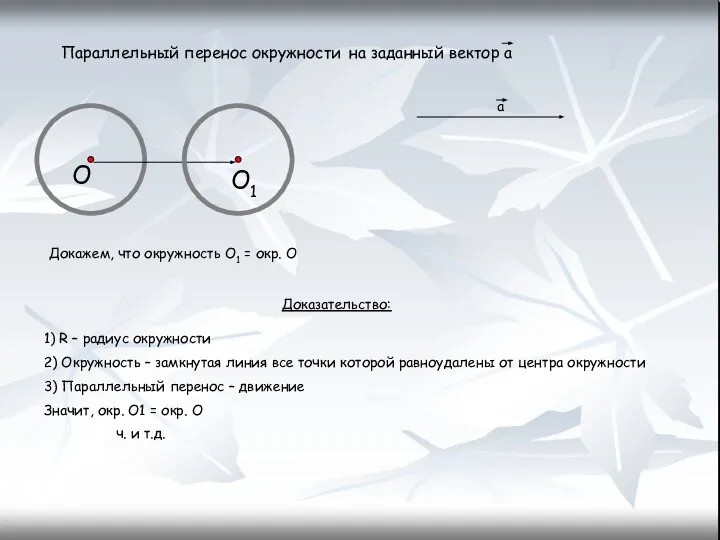
Параллельный перенос окружности на заданный вектор а
О
а
О1
Доказательство:
Докажем, что окружность О1 =
Параллельный перенос окружности на заданный вектор а
О
а
О1
Доказательство:
Докажем, что окружность О1 =
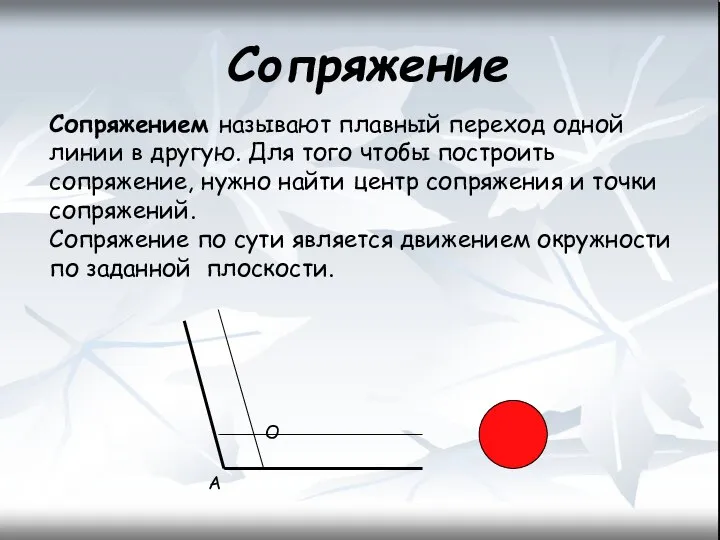
Сопряжение
Сопряжением называют плавный переход одной линии в другую. Для того
Сопряжение
Сопряжением называют плавный переход одной линии в другую. Для того
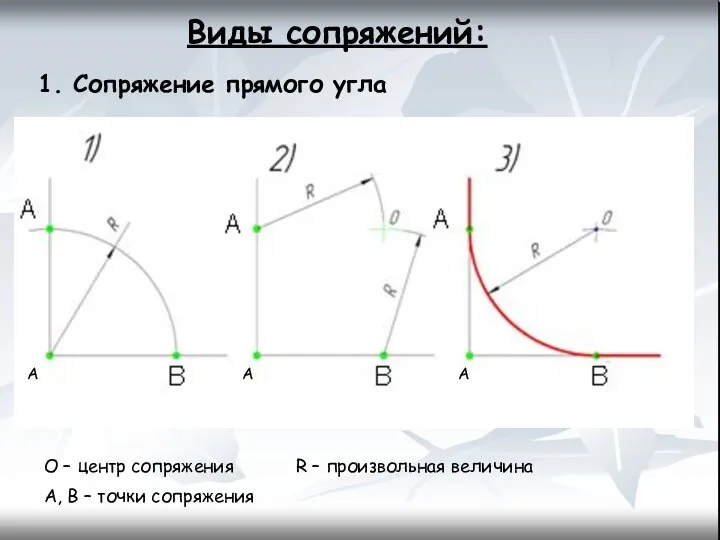
1. Сопряжение прямого угла
О – центр сопряжения R – произвольная величина
A, B
1. Сопряжение прямого угла
О – центр сопряжения R – произвольная величина
A, B
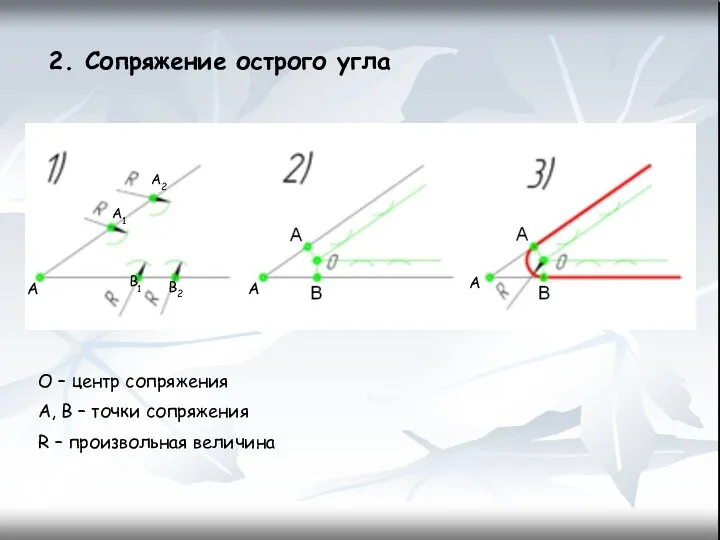
2. Сопряжение острого угла
О – центр сопряжения
A, B – точки сопряжения
R
2. Сопряжение острого угла
О – центр сопряжения
A, B – точки сопряжения
R
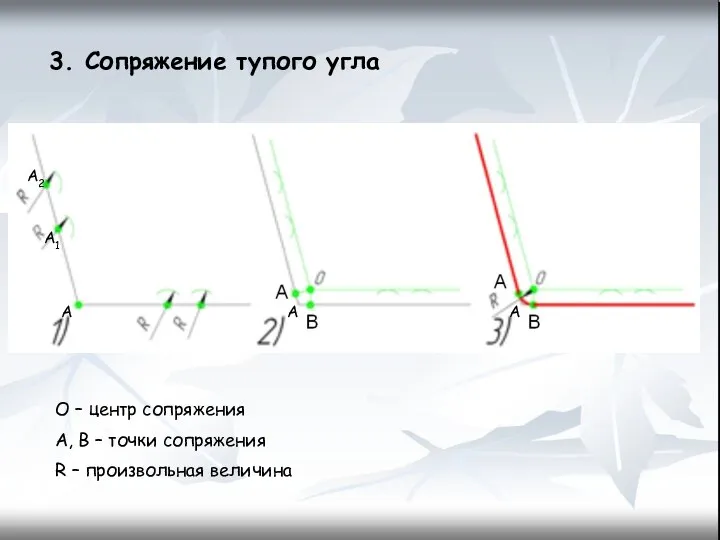
3. Сопряжение тупого угла
О – центр сопряжения
A, B – точки сопряжения
R
3. Сопряжение тупого угла
О – центр сопряжения
A, B – точки сопряжения
R

4. Сопряжение параллельных прямых линий
О – центр сопряжения
A, B – точки
4. Сопряжение параллельных прямых линий
О – центр сопряжения
A, B – точки
 Презентация непосредственно образовательной деятельности по формированию элементарных математических представлений
Презентация непосредственно образовательной деятельности по формированию элементарных математических представлений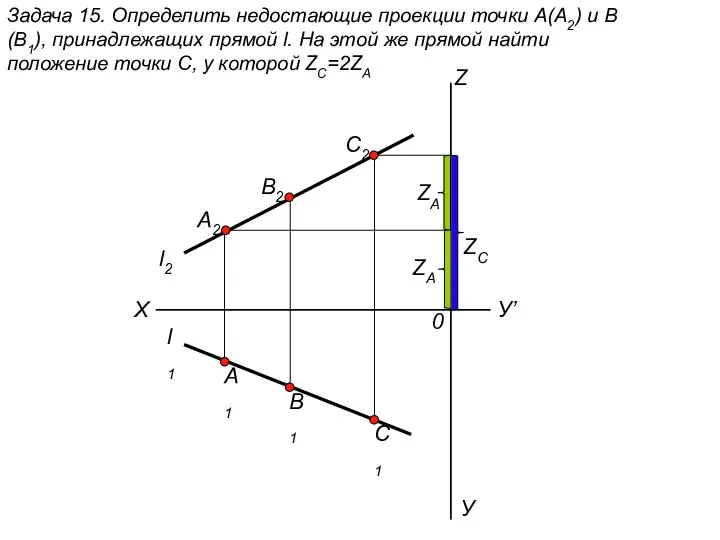 Определить недостающие проекции точки А(А2) и В(В1). (задача 15)
Определить недостающие проекции точки А(А2) и В(В1). (задача 15) Аттестационная работа. Методическая разработка проектно-исследовательской работы Графики и их применение. (9 класс)
Аттестационная работа. Методическая разработка проектно-исследовательской работы Графики и их применение. (9 класс) Многоугольник
Многоугольник Предел функции в точке
Предел функции в точке Г.В. Дорофеев, Л.Г. Петерсон ПЕРЕВОД УСЛОВИЯ ЗАДАЧИ НА МАТЕМАТИЧЕСКИЙ ЯЗЫК ( ПОСТРОЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ) 5 КЛАСС МАТЕМАТИКА
Г.В. Дорофеев, Л.Г. Петерсон ПЕРЕВОД УСЛОВИЯ ЗАДАЧИ НА МАТЕМАТИЧЕСКИЙ ЯЗЫК ( ПОСТРОЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ) 5 КЛАСС МАТЕМАТИКА Примеры на сложение от 0 до 9 (шпаргалка для первоклассника)
Примеры на сложение от 0 до 9 (шпаргалка для первоклассника) Производная и её применение. Подготовка к ЕГЭ
Производная и её применение. Подготовка к ЕГЭ Квадратичная функция и ее свойства
Квадратичная функция и ее свойства Моделирование эволюционных игр с гетерогенным дискретным выбором на графах
Моделирование эволюционных игр с гетерогенным дискретным выбором на графах Порядок выполнения действий, 5 класс
Порядок выполнения действий, 5 класс Метод координат при решении стереометрических задач. Урок геометрии, 11 класс
Метод координат при решении стереометрических задач. Урок геометрии, 11 класс Математическая цепочка
Математическая цепочка Симметрия в нашей жизни
Симметрия в нашей жизни Неделя математики, физики, информатики и ИКТ
Неделя математики, физики, информатики и ИКТ Как люди научились считать
Как люди научились считать Solid geometry
Solid geometry Задачи в готовых чертежах по теме: «Признаки равенства треугольников»
Задачи в готовых чертежах по теме: «Признаки равенства треугольников» Решение систем линейных уравнений методом Гаусса и Крамера
Решение систем линейных уравнений методом Гаусса и Крамера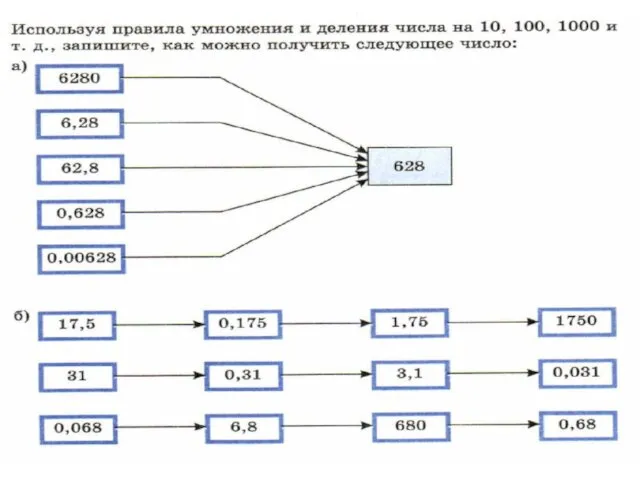 Умножение и деления числа на 10, 100, 1000
Умножение и деления числа на 10, 100, 1000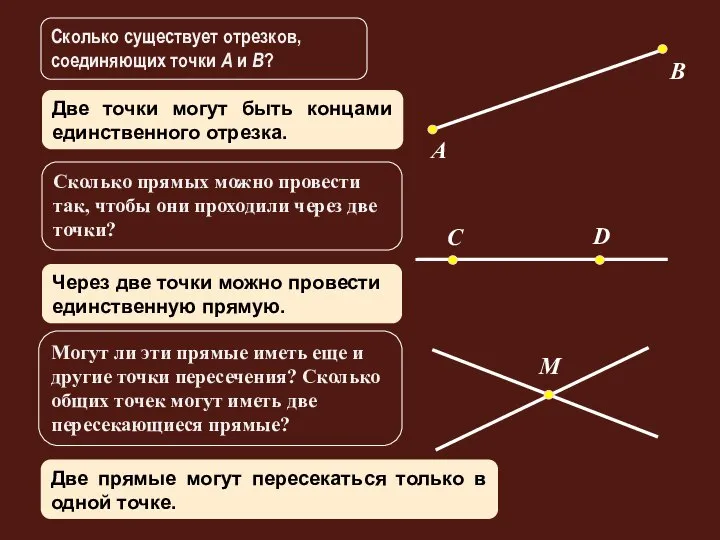 Две точки.Отрезок.
Две точки.Отрезок. Устный счёт на уроках математики в пределах 10 (1 класс)
Устный счёт на уроках математики в пределах 10 (1 класс) Свойства равнобедренного треугольника
Свойства равнобедренного треугольника Стандартный вид числа. Правила записи чисел в стандартном виде
Стандартный вид числа. Правила записи чисел в стандартном виде Наибольший общий делитель. Взаимно простые числа. Урок математики в 6 классе. Учитель математики ГБОУ «Школа №15» Дмитрий Вад
Наибольший общий делитель. Взаимно простые числа. Урок математики в 6 классе. Учитель математики ГБОУ «Школа №15» Дмитрий Вад Решение заданий В8 ЕГЭ по математике
Решение заданий В8 ЕГЭ по математике Симметрия
Симметрия Проценты. 6 класс
Проценты. 6 класс