- Лекция 10. Математическое описание ЛС. Линейная непрерывная система и ее представления

Содержание
- 2. 1 Классификация элементов систем Система автоматического управления – это совокупность элементов, соединенных в замкнутый контур, которые
- 3. По виду энергии, используемой для работы: Электрические Механические Гидравлические Пневматические Комбинированные По характеру математического соответствия между
- 4. При математическом описании элементы называются звеньями САУ. Несмотря на многообразие различного рода элементов (устройств) и независимо
- 5. В позиционном (или усилительном) звене линейной зависимостью y = Ku связаны входная и выходная величина в
- 6. Статические характеристики а – усилительного звена, б – интегрирующего звена, в – дифференцирующего звена
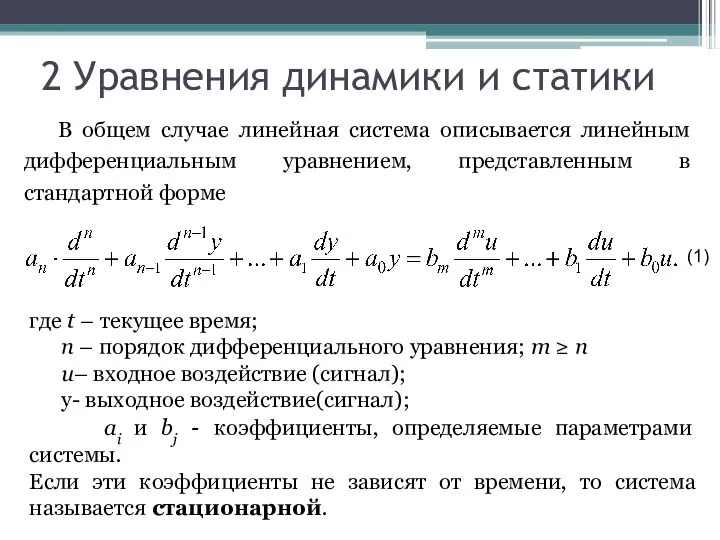
- 7. 2 Уравнения динамики и статики В общем случае линейная система описывается линейным дифференциальным уравнением, представленным в
- 8. Дифференциальные уравнения называют уравнениями динамики, они описывают переходные режимы в системах. Переходной режим возникает при подаче
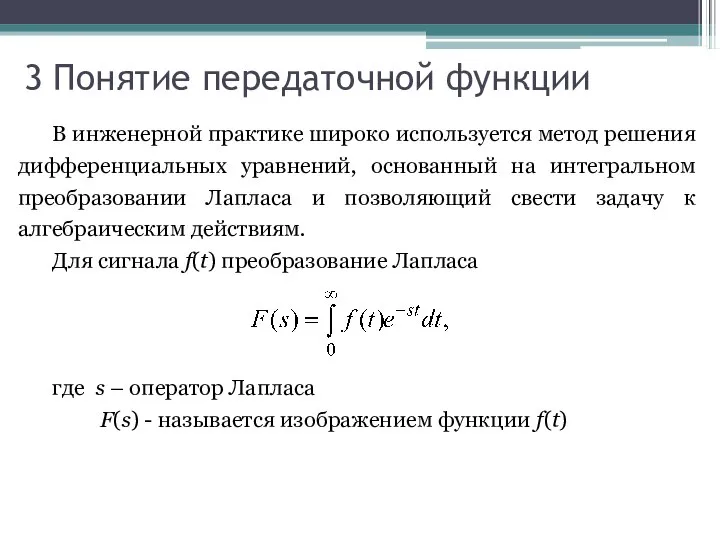
- 9. 3 Понятие передаточной функции В инженерной практике широко используется метод решения дифференциальных уравнений, основанный на интегральном
- 10. y(t) – оригинал ; Y(s) – изображение функции y(t); s – комплексная переменная; Соответствие между рядом
- 11. При нулевых начальных условиях, т. е. в том случае, если при t (2) Передаточная функция звена
- 12. Примем Прямое преобразование Лапласа
- 13. Передаточные функции звеньев имеют вид: - Позиционное или усилительное звено Интегрирующее звено Дифференцирующее звено Передаточная функция
- 14. Передаточная функция элемента не зависит от того, какой функцией времени является его входное воздействие. Она зависит
- 15. W(s) можно представить следующим образом: где K – коэффициент усиления, – нули системы, т. е. корни
- 16. Для описания моделей систем и действий над ними широко используется система MATLAB и пакет прикладных программ
- 17. zpk-форма нулей, полюсов и коэффициента усиления, в которой передаточная функция описывается двумя векторами-строками и одним числом,
- 18. При описании элементов и систем кроме входных u(t) и выходных y(t) переменных можно выделить некоторые промежуточные
- 19. 4 Передаточные функции различных соединений звеньев При последовательном соединении звеньев с известными передаточными функциями W1(s), W2(s)
- 20. При параллельном соединении звеньев с передаточными функциями W1(s), W2(s) ,…, Wn(s) передаточные функции складываются Y(s) =
- 21. Соединение звеньев с обратной связью имеет прямую цепь передачи сигнала и цепь обратной связи. Для соединения
- 22. 5 Временные характеристики систем и их элементов Типовые воздействия Единичное ступенчатое воздействие Единичное импульсное воздействие, (дельта
- 23. Переходная функция h(t) – это функция, определяющая изменение выходной величины системы (или отдельного элемента) при воздействии
- 24. Импульсная переходная (или весовая) функция w(t) – это функция, определяющая изменение выходной величины системы (или отдельного
- 25. Пример 1: Найти весовую функцию системы, если переходная функция равна Решение: Найдем изображение переходной функции Получаем
- 26. Пример 2. Определить передаточную, переходную и весовую функции звена, которое описывается дифференциальным уравнением Переходя в область
- 28. Скачать презентацию
1 Классификация элементов систем
Система автоматического управления – это совокупность элементов, соединенных
1 Классификация элементов систем
Система автоматического управления – это совокупность элементов, соединенных
По виду энергии, используемой для работы:
Электрические
Механические
Гидравлические
Пневматические
Комбинированные
По характеру математического
По виду энергии, используемой для работы:
Электрические
Механические
Гидравлические
Пневматические
Комбинированные
По характеру математического
При математическом описании элементы называются звеньями САУ.
Несмотря на многообразие различного
При математическом описании элементы называются звеньями САУ.
Несмотря на многообразие различного
В позиционном (или усилительном) звене линейной зависимостью y = Ku связаны входная и
В позиционном (или усилительном) звене линейной зависимостью y = Ku связаны входная и
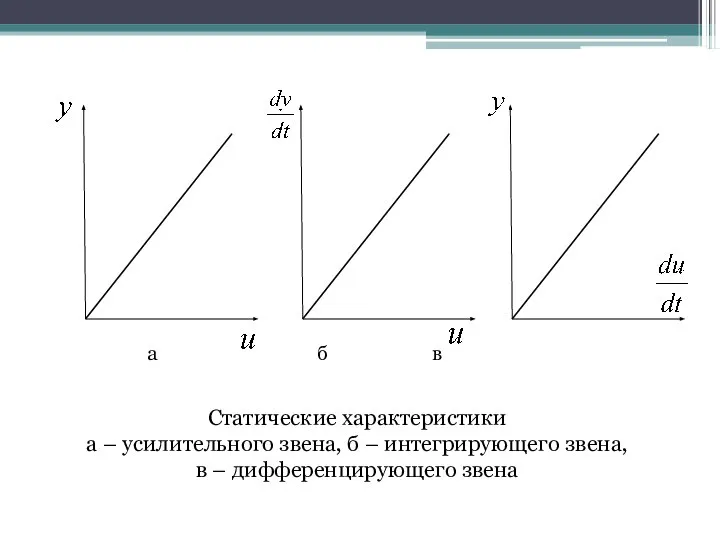
Статические характеристики
а – усилительного звена, б – интегрирующего звена,
в –
Статические характеристики
а – усилительного звена, б – интегрирующего звена,
в –
2 Уравнения динамики и статики
В общем случае линейная система описывается линейным
2 Уравнения динамики и статики
В общем случае линейная система описывается линейным
Дифференциальные уравнения называют уравнениями динамики, они описывают переходные режимы в системах.
Дифференциальные уравнения называют уравнениями динамики, они описывают переходные режимы в системах.
3 Понятие передаточной функции
В инженерной практике широко используется метод решения
3 Понятие передаточной функции
В инженерной практике широко используется метод решения
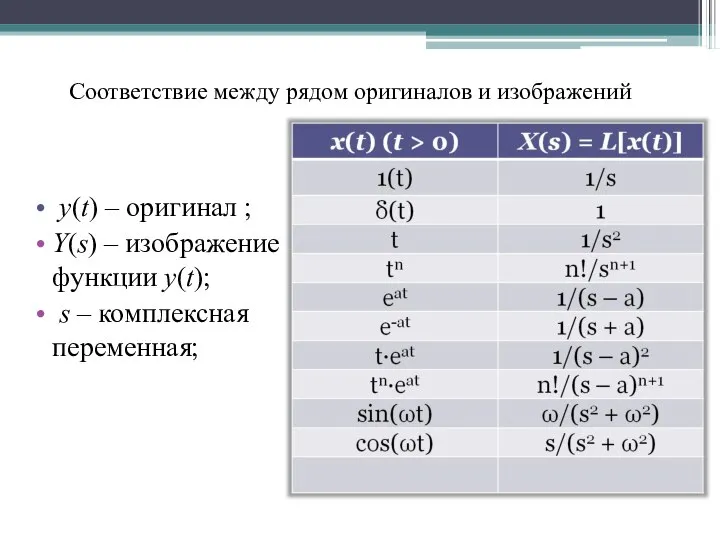
y(t) – оригинал ;
Y(s) – изображение функции y(t);
y(t) – оригинал ;
Y(s) – изображение функции y(t);
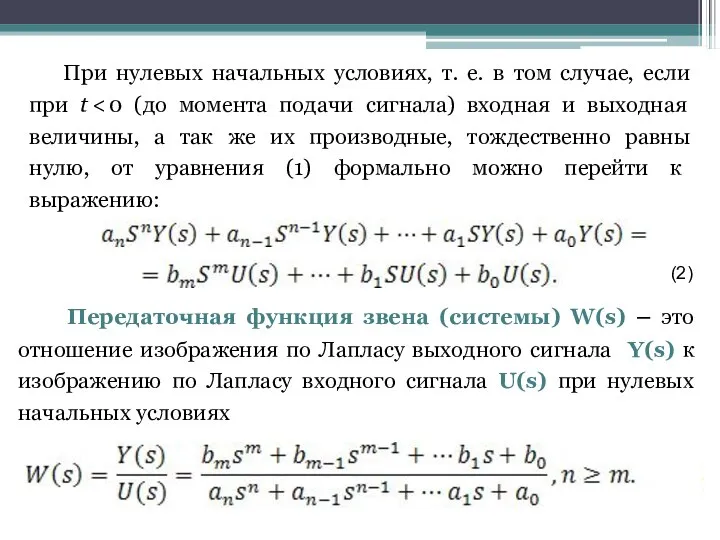
При нулевых начальных условиях, т. е. в том случае, если при
При нулевых начальных условиях, т. е. в том случае, если при
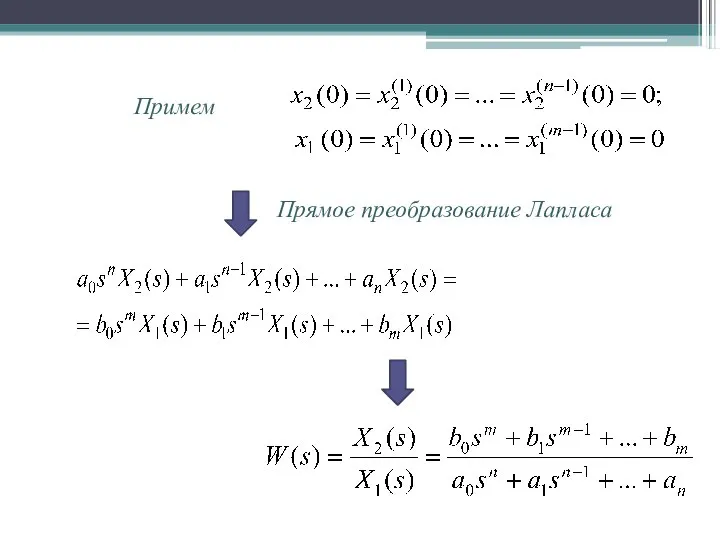
Примем
Прямое преобразование Лапласа
Примем
Прямое преобразование Лапласа
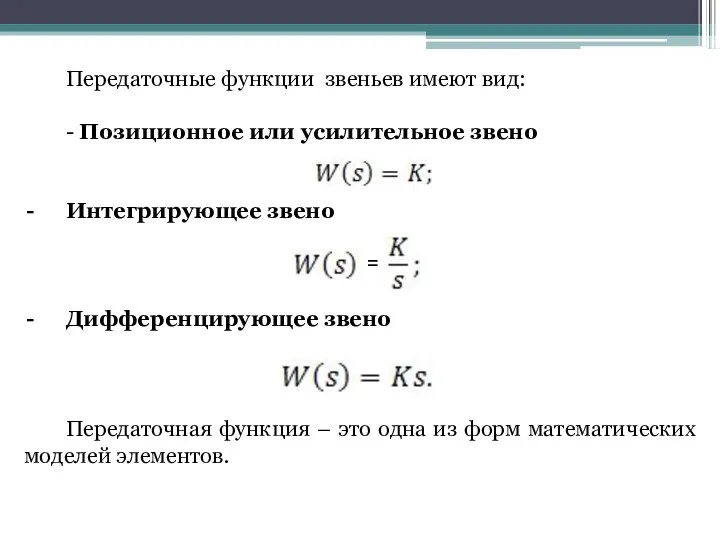
Передаточные функции звеньев имеют вид:
- Позиционное или усилительное звено
Интегрирующее звено
Дифференцирующее
Передаточные функции звеньев имеют вид:
- Позиционное или усилительное звено
Интегрирующее звено
Дифференцирующее
Передаточная функция элемента не зависит от того, какой функцией времени является
Передаточная функция элемента не зависит от того, какой функцией времени является
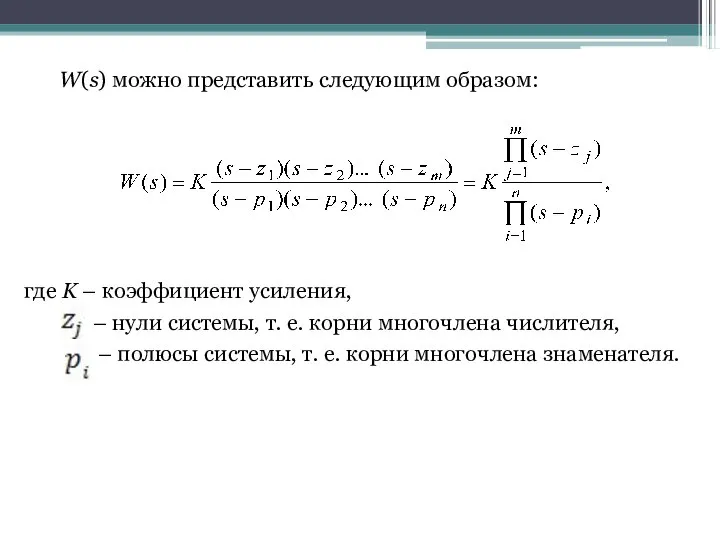
W(s) можно представить следующим образом:
где K – коэффициент усиления,
– нули
W(s) можно представить следующим образом:
где K – коэффициент усиления,
– нули
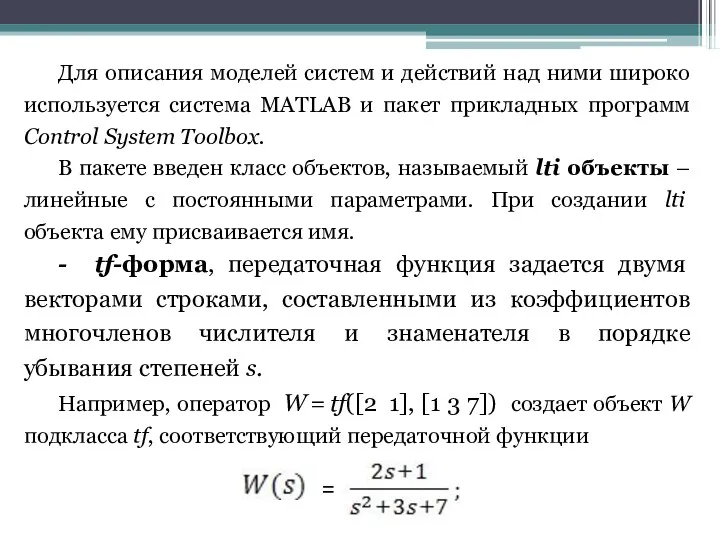
Для описания моделей систем и действий над ними широко используется система
Для описания моделей систем и действий над ними широко используется система
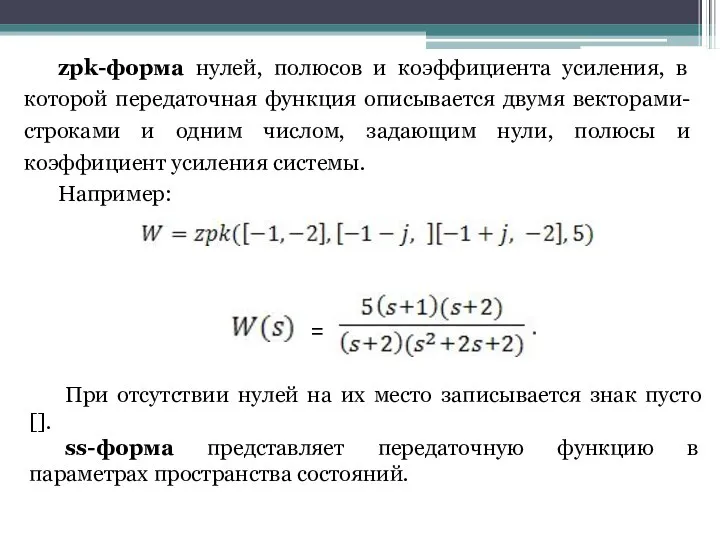
zpk-форма нулей, полюсов и коэффициента усиления, в которой передаточная функция описывается
zpk-форма нулей, полюсов и коэффициента усиления, в которой передаточная функция описывается
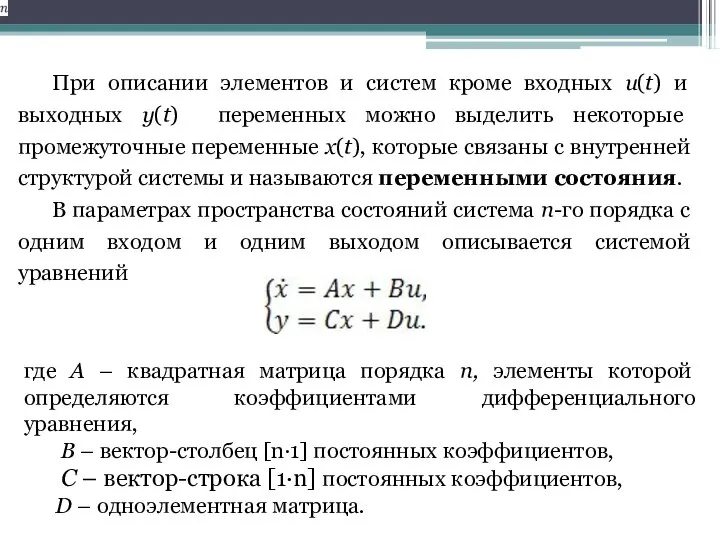
При описании элементов и систем кроме входных u(t) и выходных y(t)
При описании элементов и систем кроме входных u(t) и выходных y(t)
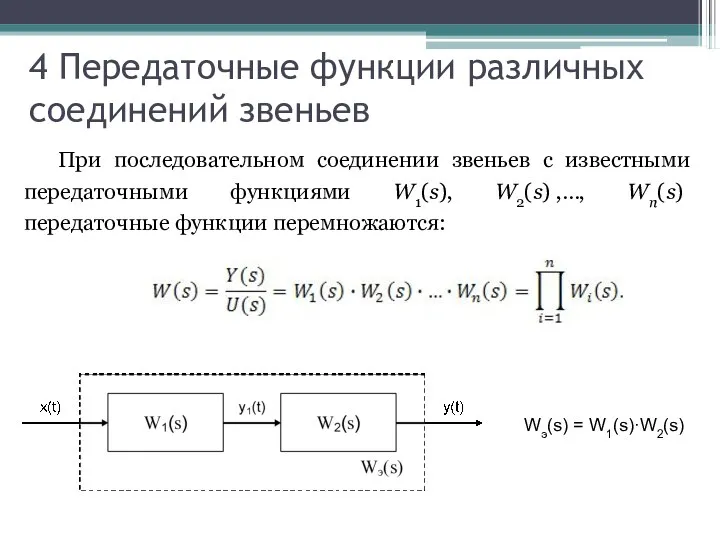
4 Передаточные функции различных соединений звеньев
При последовательном соединении звеньев с известными
4 Передаточные функции различных соединений звеньев
При последовательном соединении звеньев с известными
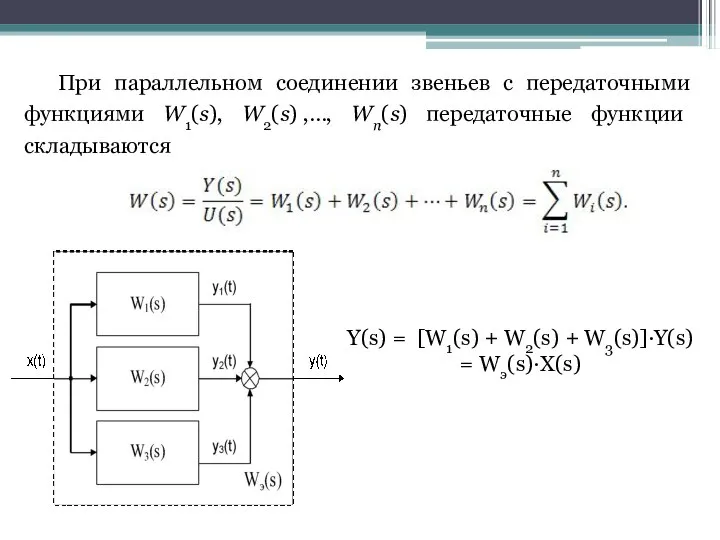
При параллельном соединении звеньев с передаточными функциями W1(s), W2(s) ,…, Wn(s) передаточные
При параллельном соединении звеньев с передаточными функциями W1(s), W2(s) ,…, Wn(s) передаточные
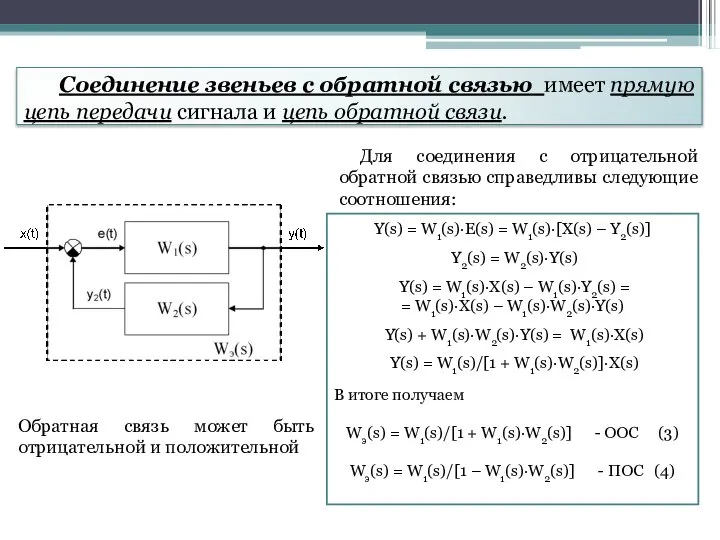
Соединение звеньев с обратной связью имеет прямую цепь передачи сигнала и
Соединение звеньев с обратной связью имеет прямую цепь передачи сигнала и
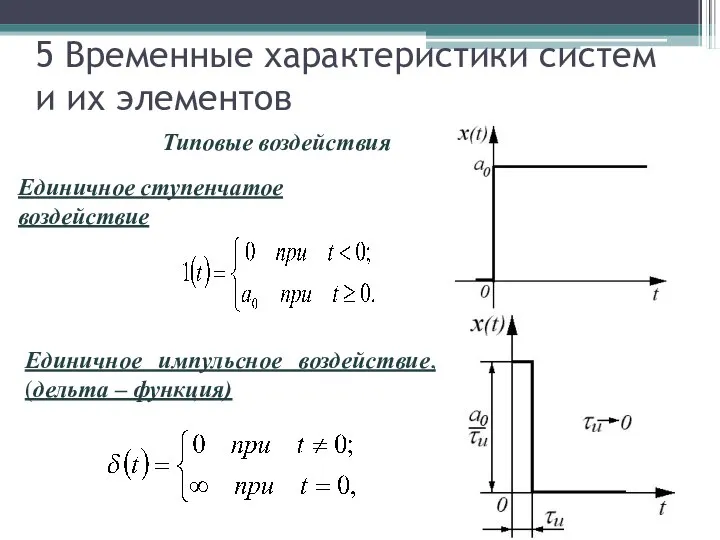
5 Временные характеристики систем и их элементов
Типовые воздействия
Единичное ступенчатое воздействие
Единичное
5 Временные характеристики систем и их элементов
Типовые воздействия
Единичное ступенчатое воздействие
Единичное
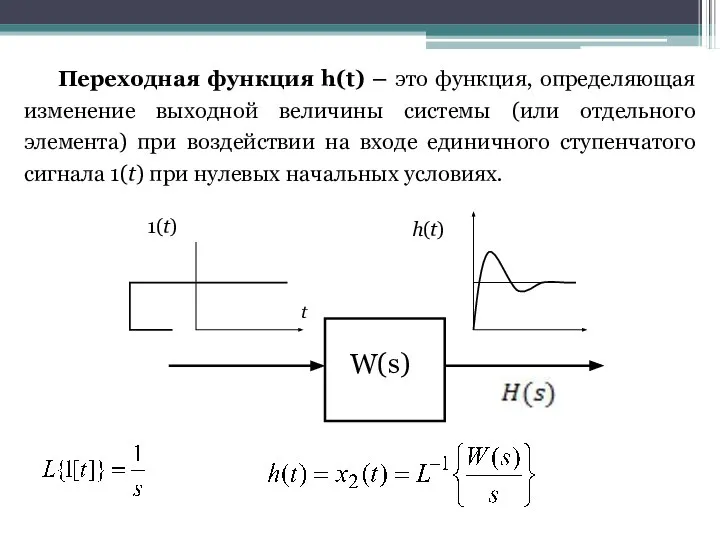
Переходная функция h(t) – это функция, определяющая изменение выходной величины системы
Переходная функция h(t) – это функция, определяющая изменение выходной величины системы
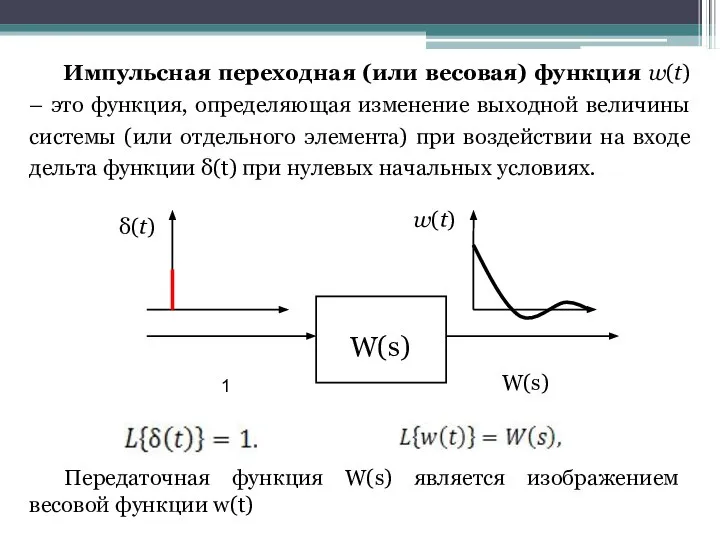
Импульсная переходная (или весовая) функция w(t) – это функция, определяющая изменение
Импульсная переходная (или весовая) функция w(t) – это функция, определяющая изменение
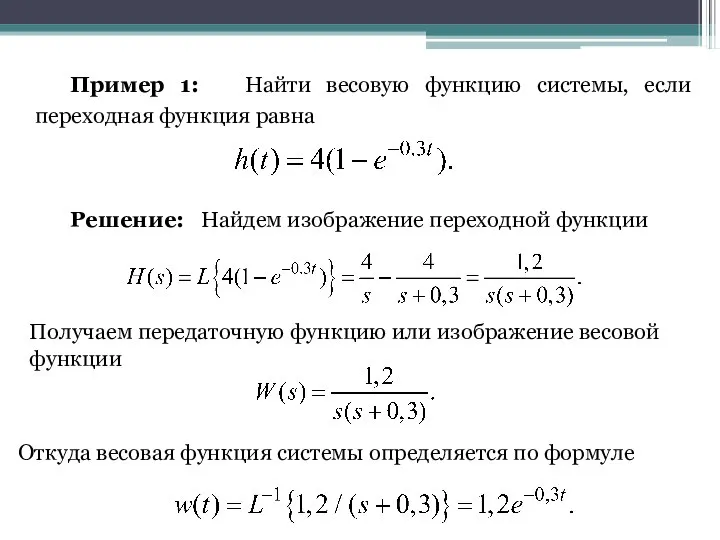
Пример 1: Найти весовую функцию системы, если переходная функция
Пример 1: Найти весовую функцию системы, если переходная функция
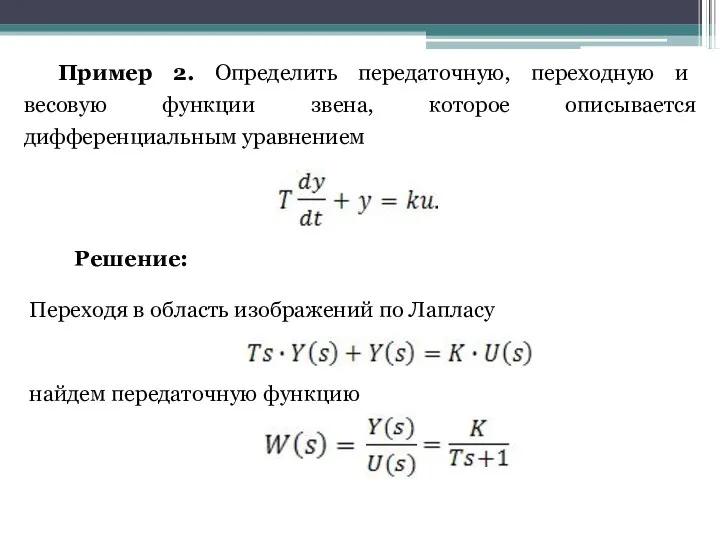
Пример 2. Определить передаточную, переходную и весовую функции звена, которое описывается
Пример 2. Определить передаточную, переходную и весовую функции звена, которое описывается
 Решение уравнения cosx = a. Понятие арккосинуса числа
Решение уравнения cosx = a. Понятие арккосинуса числа Презентация по математике "Путешествие во времени" - скачать
Презентация по математике "Путешествие во времени" - скачать  Расчет погрешностей. (1)
Расчет погрешностей. (1) Разложение многочлена на множители
Разложение многочлена на множители Плоские гармонические волны в неравновесных системах. (Лекция 9)
Плоские гармонические волны в неравновесных системах. (Лекция 9) Углы, связанные с окружностью
Углы, связанные с окружностью Сравнение отрезков и углов
Сравнение отрезков и углов Содержание проекта Симметрия вокруг нас
Содержание проекта Симметрия вокруг нас Сложение чисел. Сложение вида □+4
Сложение чисел. Сложение вида □+4 Устный счет по сказкам Пушкина
Устный счет по сказкам Пушкина Шах и Мат. Курс ЭМШ по математике 2017-1018
Шах и Мат. Курс ЭМШ по математике 2017-1018 Последовательности и прогрессии в жизни
Последовательности и прогрессии в жизни Презентация на тему Устный счет 3 класс
Презентация на тему Устный счет 3 класс  Обобщающие характеристики статистической совокупности
Обобщающие характеристики статистической совокупности Математико-статистическое методы в педагогических исследованиях
Математико-статистическое методы в педагогических исследованиях Decimals
Decimals Квадратные уравнения. 8 класс
Квадратные уравнения. 8 класс Информационные модели на графах
Информационные модели на графах Линейная функция
Линейная функция Работа над дифференциацией согласных звуков, смешиваемых по звонкости-глухости в системе коррекции артикуляторно-акустическо
Работа над дифференциацией согласных звуков, смешиваемых по звонкости-глухости в системе коррекции артикуляторно-акустическо Первый замечательный предел
Первый замечательный предел Площадь фигур
Площадь фигур Арифметическая прогрессия
Арифметическая прогрессия БЧХ. Корневой подход
БЧХ. Корневой подход Математика – это интересно!
Математика – это интересно! Ух, уж эта математика
Ух, уж эта математика Презентация по математике "Понятие одночлена стандартный вид одночлена" - скачать
Презентация по математике "Понятие одночлена стандартный вид одночлена" - скачать  Угол. Измерение углов. Урок математики в 5 классе
Угол. Измерение углов. Урок математики в 5 классе