- Методы определения динамических характеристик объектов по переходным функциям. (тема 4)

Содержание
- 2. МЕТОДЫ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ОБЪЕКТОВ ПО ПЕРЕХОДНЫМ ФУНКЦИЯМ Основной признак классификации методов идентификации по переходной функции
- 3. Известно, что решение линейного дифференциального уравнения с постоянными коэффициентами и нулевыми начальными условиями существует и единственно.
- 4. 1. АППРОКСИМАЦИЯ ПЕРЕХОДНОЙ ФУНКЦИИ РЕШЕНИЕМ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ С ПРОСТЫМИ ВЕЩЕСТВЕННЫМИ КОРНЯМИ Метод последовательного логарифмирования. Этот метод
- 5. . (3.15) Эти условия означают, что аппроксимирующая функция W(s) имеет только вещественные простые полюсы, расположенные на
- 6. , Идея метода заключается в последовательном приближении h(t) вначале решением уравнения первого порядка, т.е. функцией и
- 7. (3.15) Последовательность действий при его применении следующая. По условию все корни αi различны, поэтому скорость убывания
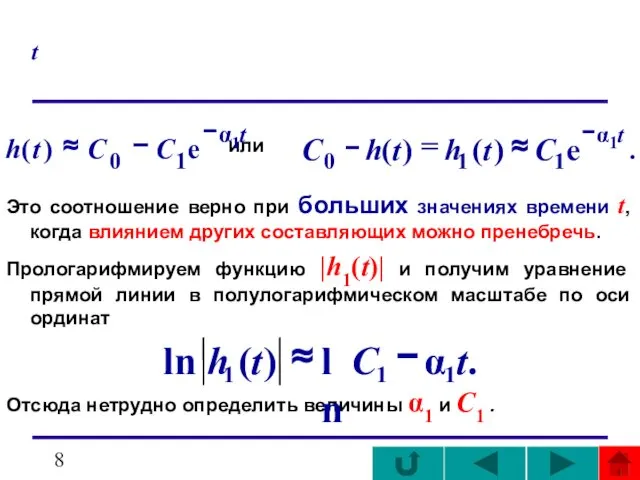
- 8. t или Это соотношение верно при больших значениях времени t, когда влиянием других составляющих можно пренебречь.
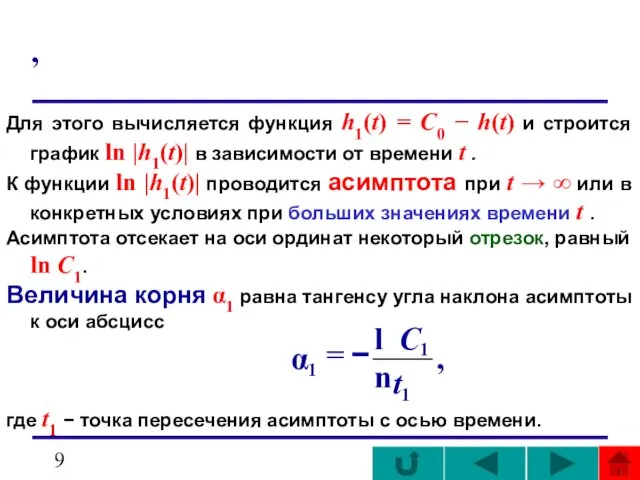
- 9. , Для этого вычисляется функция h1(t) = C0 − h(t) и строится график ln |h1(t)| в
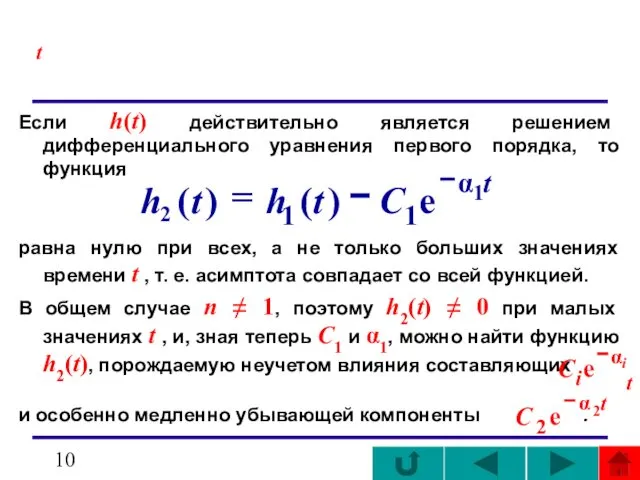
- 10. t Если h(t) действительно является решением дифференциального уравнения первого порядка, то функция равна нулю при всех,
- 11. ) Можно построить функцию h2(t) на графике в полулогарифмическом масштабе по оси ординат, для этого следует
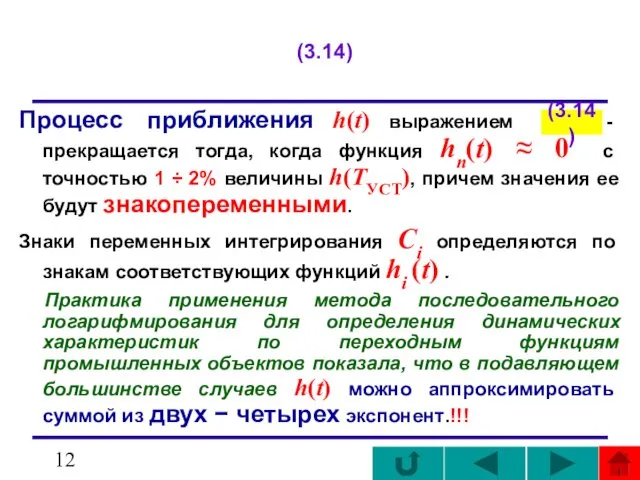
- 12. (3.14) Процесс приближения h(t) выражением - прекращается тогда, когда функция hn(t) ≈ 0 с точностью 1
- 13. . (3.16) При правильном определении параметров αi и Ci должны выполняться следующие «начальные» условия: При большом
- 14. . (3.17) Далее (согласно ) получим передаточную функцию объекта W(s), положив x(t) = A1(t), изображение которого
- 15. . Следует указать, что определение коэффициентов Сi и корней αi осуществляется по переходной функции, из которой
- 16. Достоинства и недостатки метода Рассмотренный метод аппроксимации h(t) решением линейного дифференциального уравнения достаточно прост и позволяет
- 17. Пример. Поясним изложенную методику примером определения коэффициентов W(s) по гладкой переходной функции, заданной равноотстоящими значениями h(ti)
- 18. Таблица 1. Данные для примера определения модели объекта
- 19. Графики к примеру определения коэффициентов W(s) методом последовательного логарифмирования График б) График а)
- 20. График а)
- 21. График б)
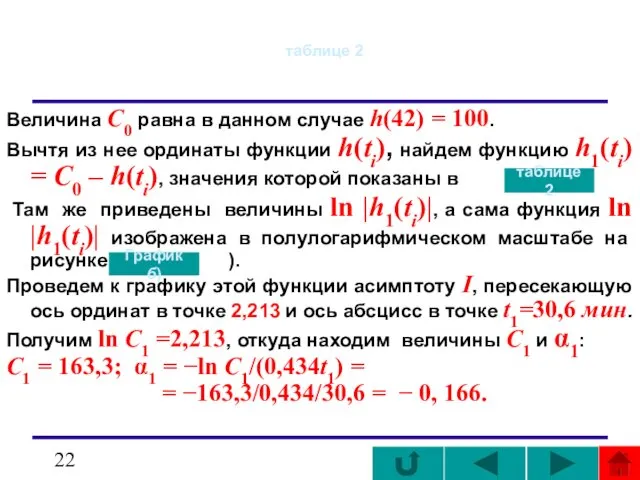
- 22. таблице 2 Величина С0 равна в данном случае h(42) = 100. Вычтя из нее ординаты функции
- 23. таблицу 2 Вычислим функцию при ti = 0, 2, 4, …, 42 мин и результаты занесем
- 24. Таблица 2. Результаты расчета для примера определения модели объекта
- 25. График б) На рисунке ( ) построена функция ln | h2(t)| и к ней проведена асимптота
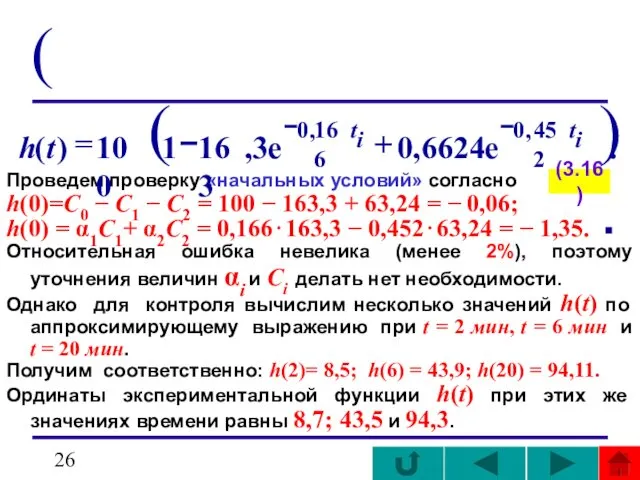
- 26. ( Проведем проверку «начальных условий» согласно : h(0)=C0 − C1 − С2 = 100 − 163,3
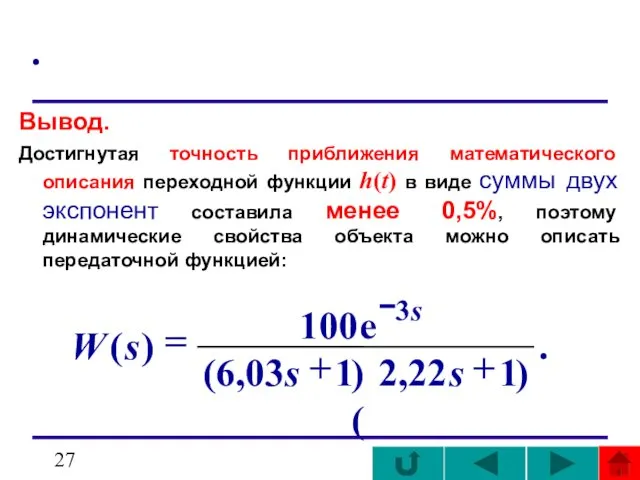
- 27. . Вывод. Достигнутая точность приближения математического описания переходной функции h(t) в виде суммы двух экспонент составила
- 28. 2. АППРОКСИМАЦИЯ ПЕРЕХОДНОЙ ФУНКЦИИ РЕШЕНИЕМ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ С ПРОСТЫМИ КОМПЛЕКСНЫМИ КОРНЯМИ Этот метод аппроксимации применяют в
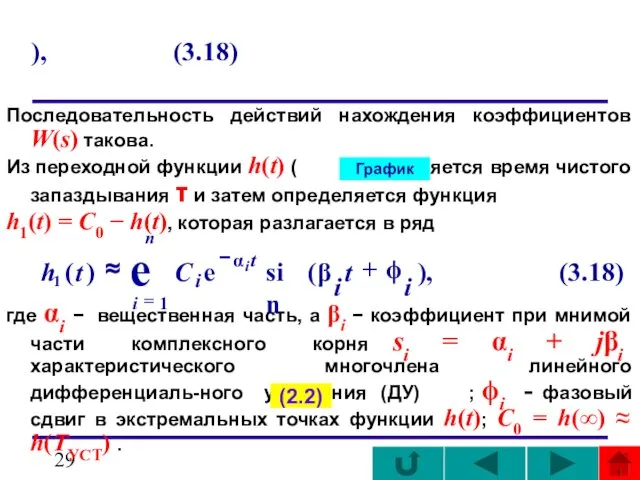
- 29. ), (3.18) Последовательность действий нахождения коэффициентов W(s) такова. Из переходной функции h(t) ( ) выделяется время
- 30. Переходная функция колебательного объекта
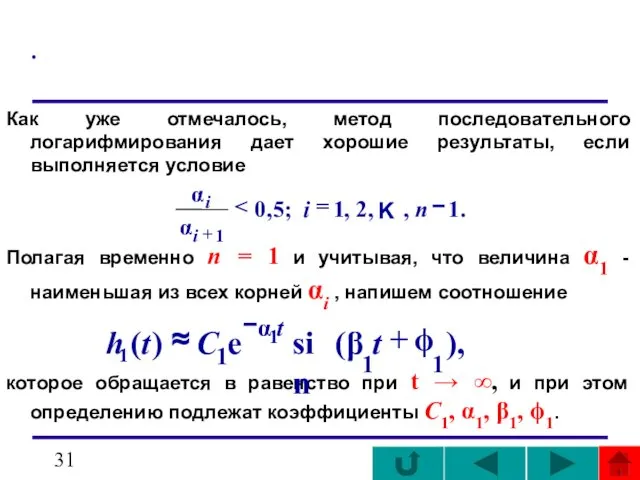
- 31. . Как уже отмечалось, метод последовательного логарифмирования дает хорошие результаты, если выполняется условие Полагая временно n
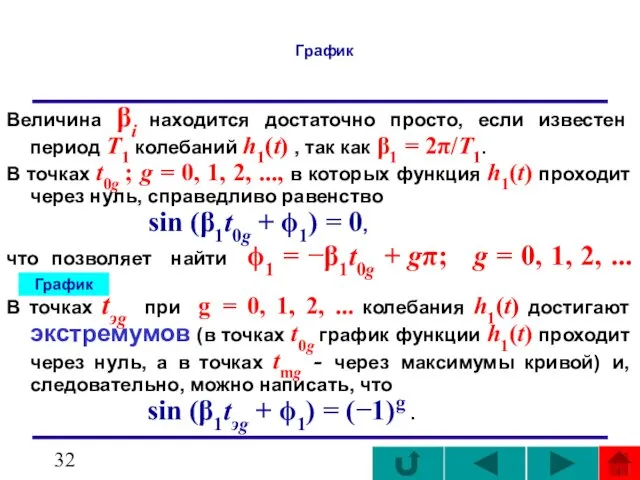
- 32. График Величина βi находится достаточно просто, если известен период T1 колебаний h1(t) , так как β1
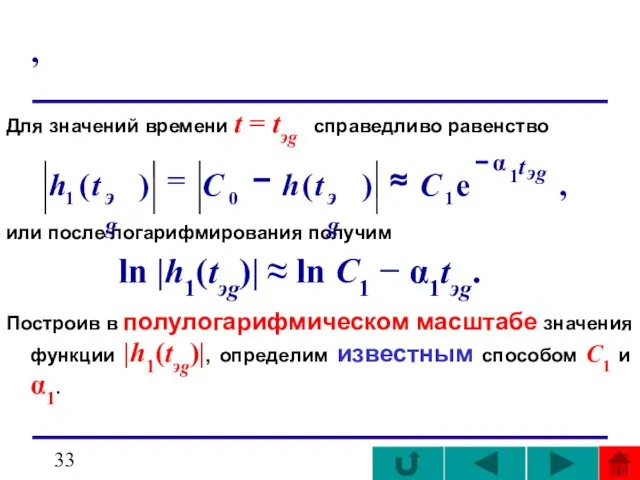
- 33. , Для значений времени t = tэg справедливо равенство или после логарифмирования получим ln |h1(tэg)| ≈
- 34. ), Далее вычисляется функция «невязки» h2(tэg): учитывающая влияние других составляющих ряда на форму h(t) . Наиболее
- 35. . Коэффициенты С2, α2, β2, ϕ2 определяются приемами, которые использовались для определения С1, α1, β1, ϕ1
- 36. . Далее записывается уравнение передаточной функции Если коэффициенты Ci , αi , βi , ϕi найдены
- 37. ; Определение некоторых коэффициентов опирается на знание периода колебаний функции h(t), который находится непосредственно из графика
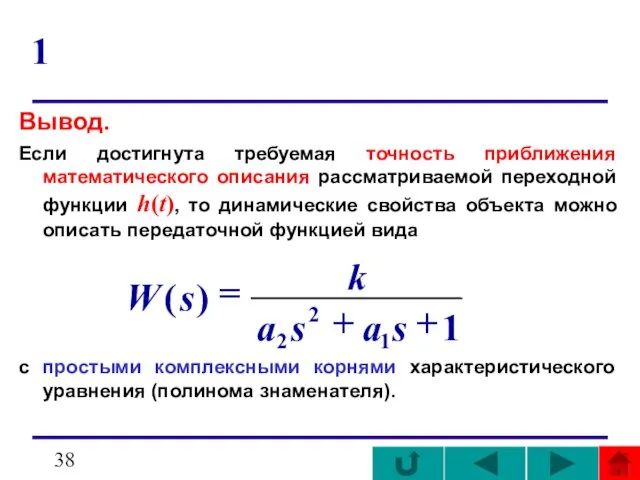
- 38. 1 Вывод. Если достигнута требуемая точность приближения математического описания рассматриваемой переходной функции h(t), то динамические свойства
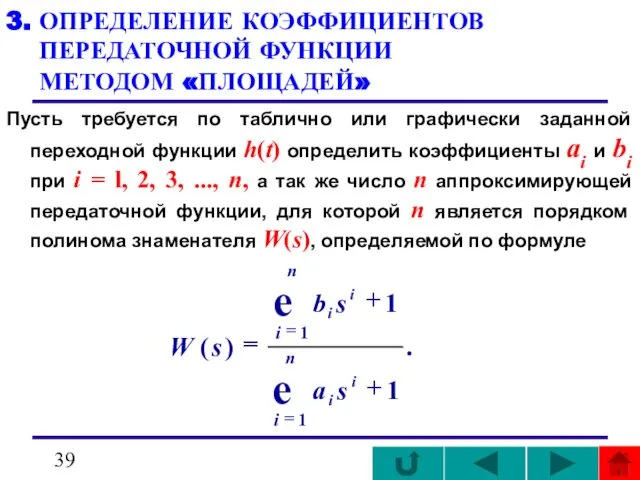
- 39. 3. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНОЙ ФУНКЦИИ МЕТОДОМ «ПЛОЩАДЕЙ» Пусть требуется по таблично или графически заданной переходной функции
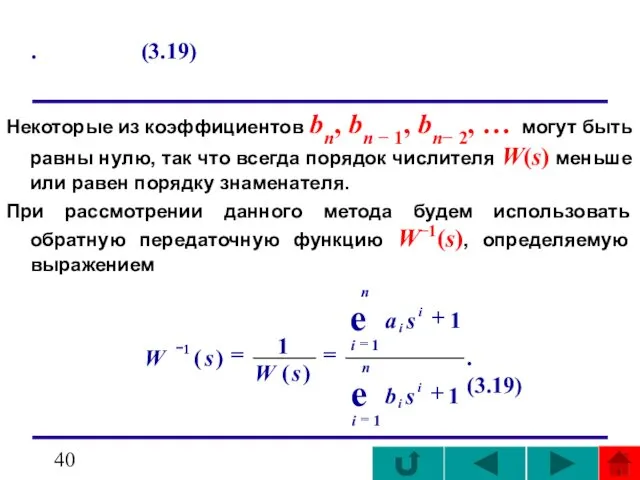
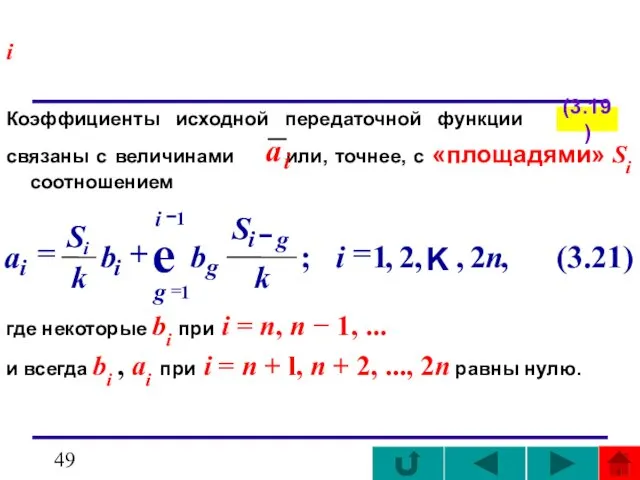
- 40. . (3.19) Некоторые из коэффициентов bп, bn − 1, bп− 2, … могут быть равны нулю,
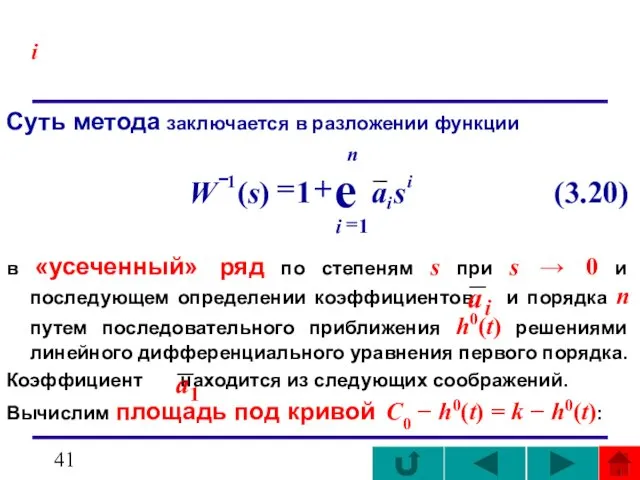
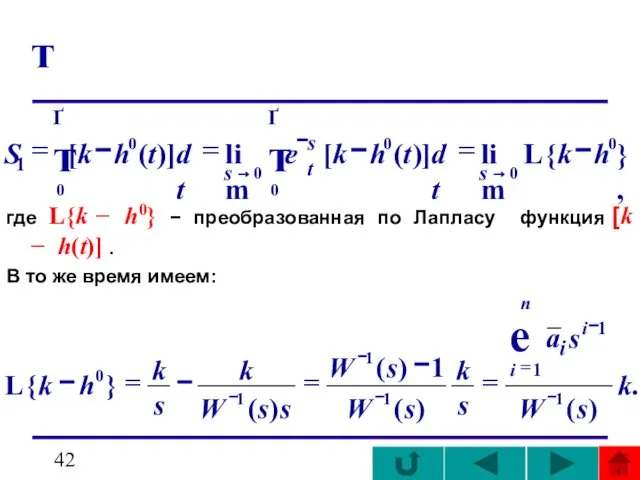
- 41. i Суть метода заключается в разложении функции в «усеченный» ряд по степеням s при s →
- 42. т где L{k − h0} − преобразованная по Лапласу функция [k − h(t)] . В то
- 43. 1 Предел последнего выражения при s → 0 равен , поэтому получаем Введем аппроксимирующую переходную функцию
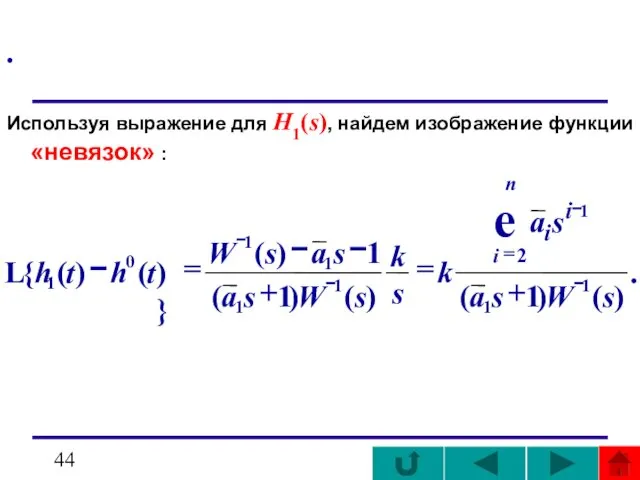
- 44. . Используя выражение для H1(s), найдем изображение функции «невязок» :
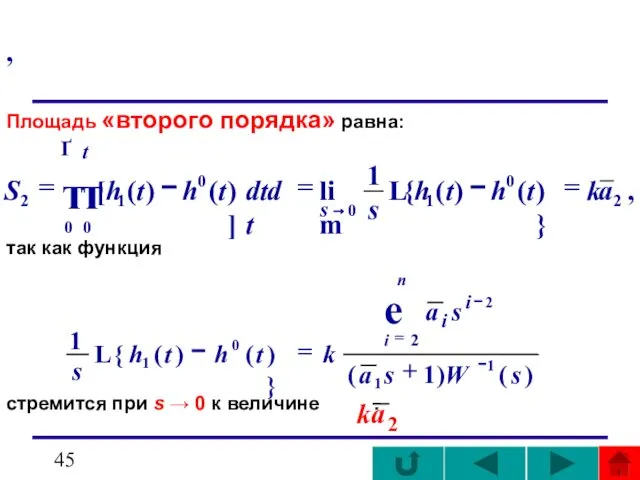
- 45. , Площадь «второго порядка» равна: так как функция стремится при s → 0 к величине .
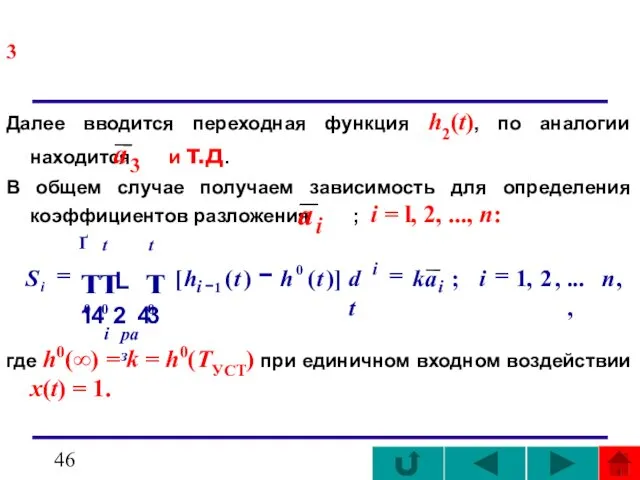
- 46. 3 Далее вводится переходная функция h2(t), по аналогии находится и т.д. В общем случае получаем зависимость
- 47. т Практическое использование последнего выражения затрудняется как сложностью вычисления Si , так и появлением накапливающихся ошибок
- 48. т В частности, при n = 2 имеем: а при n = 3 получаем:
- 49. i Коэффициенты исходной передаточной функции связаны с величинами или, точнее, с «площадями» Si соотношением где некоторые
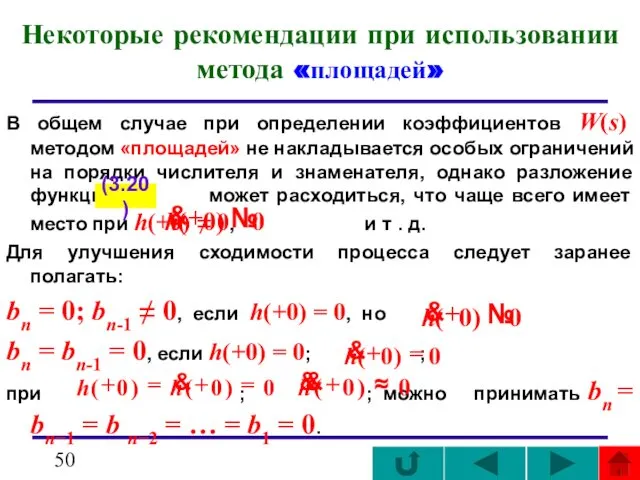
- 50. Некоторые рекомендации при использовании метода «площадей» В общем случае при определении коэффициентов W(s) методом «площадей» не
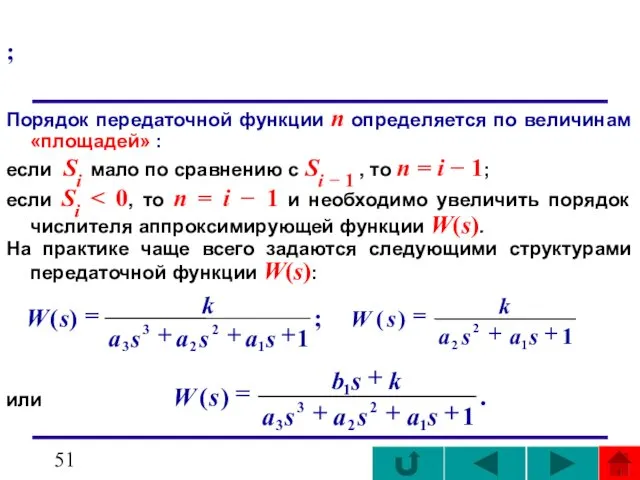
- 51. ; Порядок передаточной функции п определяется по величинам «площадей» : если Si мало по сравнению с
- 52. (3.21) Метод «площадей» не связан с графическими построениями и может быть применен для определения динамических характеристик
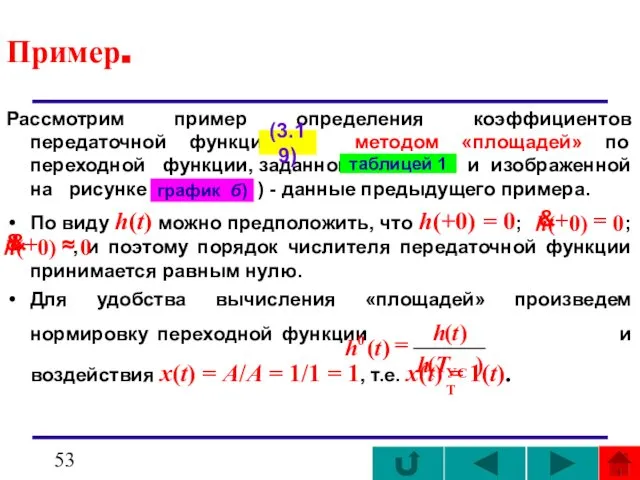
- 53. Пример. Рассмотрим пример определения коэффициентов передаточной функции методом «площадей» по переходной функции, заданной и изображенной на
- 54. мин . Затем одним из известных методов численного интегрирования находим величину В нашем примере S1 вычислялось
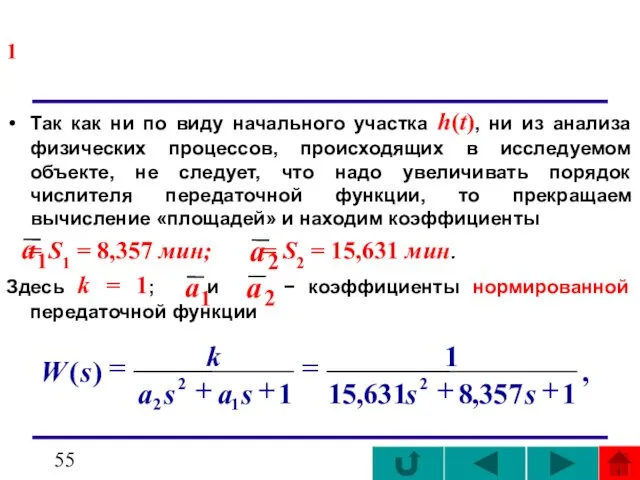
- 55. 1 Так как ни по виду начального участка h(t), ни из анализа физических процессов, происходящих в
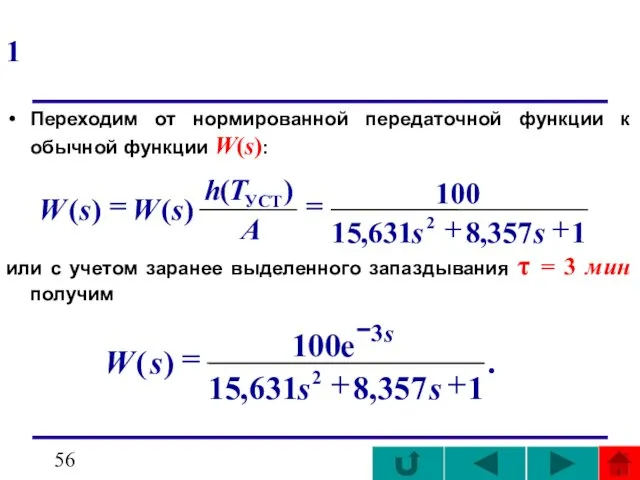
- 56. 1 Переходим от нормированной передаточной функции к обычной функции W(s): или с учетом заранее выделенного запаздывания
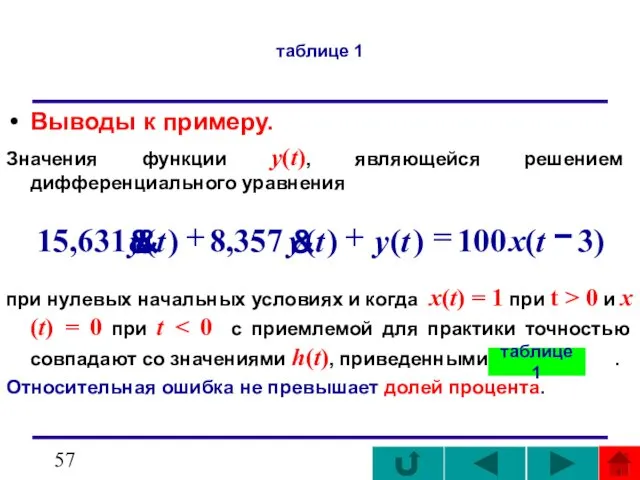
- 57. таблице 1 Выводы к примеру. Значения функции y(t), являющейся решением дифференциального уравнения при нулевых начальных условиях
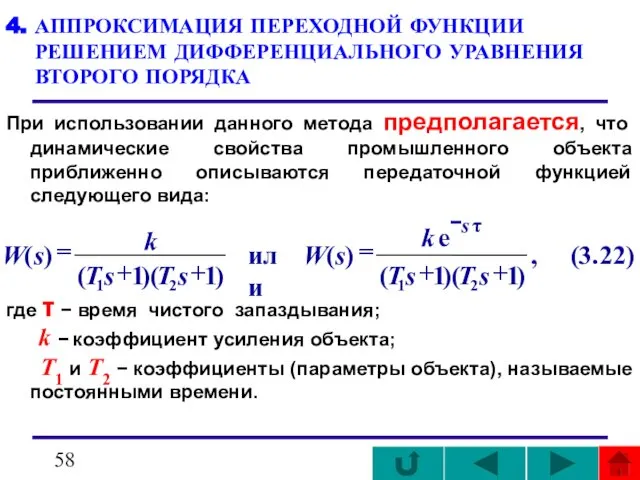
- 58. 4. АППРОКСИМАЦИЯ ПЕРЕХОДНОЙ ФУНКЦИИ РЕШЕНИЕМ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ ВТОРОГО ПОРЯДКА При использовании данного метода предполагается, что динамические
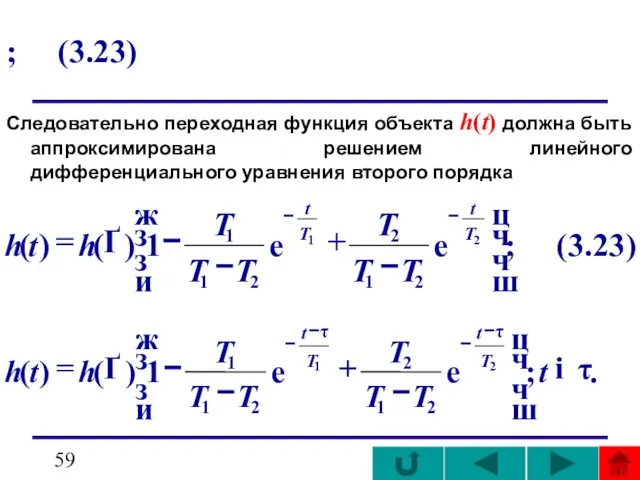
- 59. ; (3.23) Следовательно переходная функция объекта h(t) должна быть аппроксимирована решением линейного дифференциального уравнения второго порядка
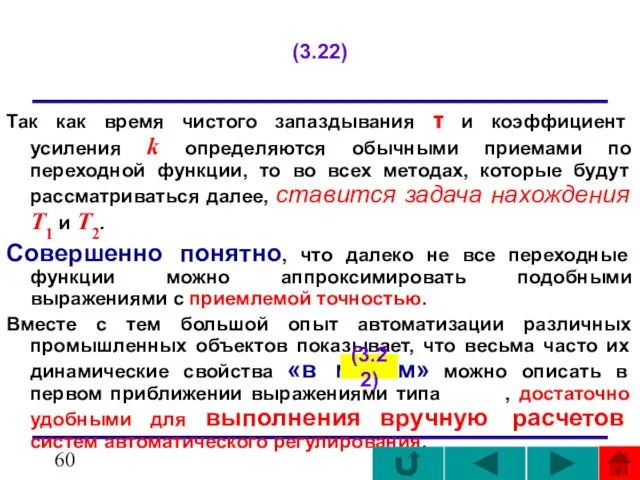
- 60. (3.22) Так как время чистого запаздывания τ и коэффициент усиления k определяются обычными приемами по переходной
- 61. %, Заранее заданная структура передаточной функции - всегда вызывает сомнения в справедливости подобной аппроксимации. Поэтому после
- 62. (3.22) Если величина δg не превышает 2 ÷ 3%, то можно считать допустимой аппроксимацию динамических свойств
- 63. 4.1. Определение постоянных времени объекта T1 и T2 с помощью графических построений Методика определения параметров объекта.
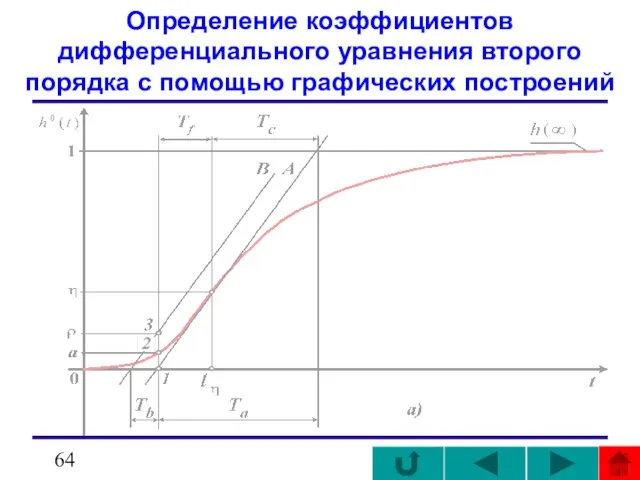
- 64. Определение коэффициентов дифференциального уравнения второго порядка с помощью графических построений
- 65. График б)
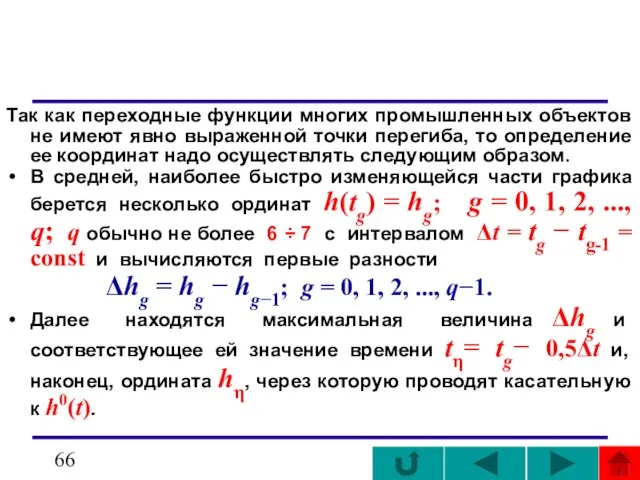
- 66. Так как переходные функции многих промышленных объектов не имеют явно выраженной точки перегиба, то определение ее
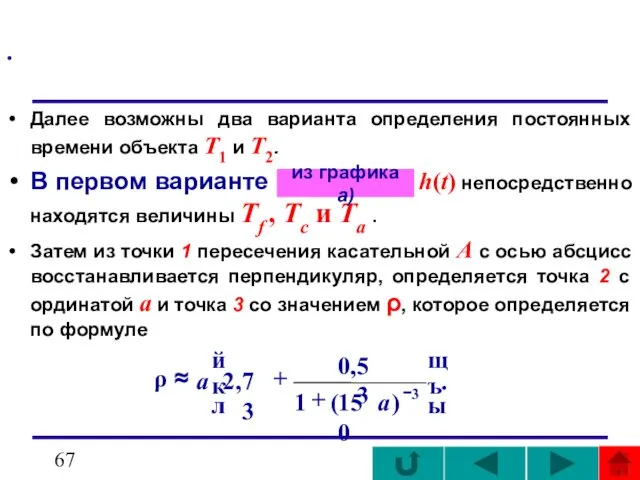
- 67. . Далее возможны два варианта определения постоянных времени объекта T1 и T2. В первом варианте h(t)
- 68. [ Через точку 3 проводится прямая линия В, параллельная касательной А, и находится время Тb. Предположив,
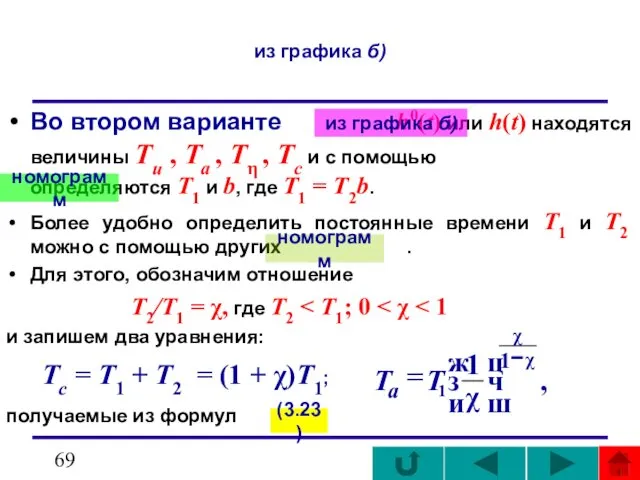
- 69. из графика б) Во втором варианте h0(t) или h(t) находятся величины Тu , Та , Tη
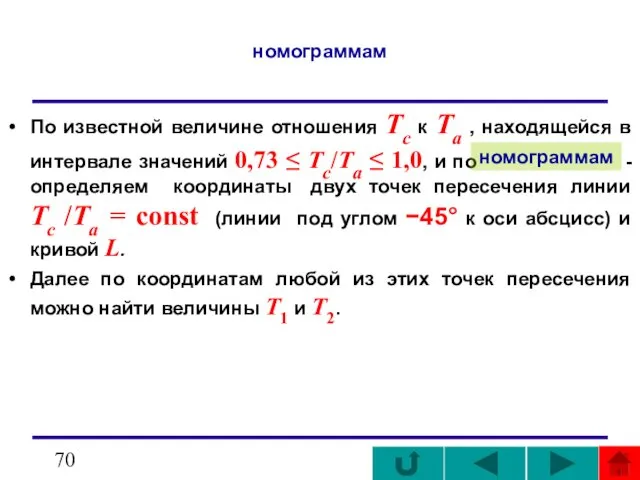
- 70. номограммам По известной величине отношения Tc к Ta , находящейся в интервале значений 0,73 ≤ Tc/Ta
- 71. Достоинства и недостатки метода Недостатки рассмотренных графических методов аппроксимации переходной функции решением уравнения второго порядка очевидны:
- 72. Номограммы для определения коэффициентов дифференциального уравнения
- 73. Номограммы для нахождения постоянных времени Т1 и T2 по Ольденбургу и Сарториусу
- 74. Пример. Рассмотрим пример нахождения T1 и Т2 по переходной функции h0(t), показанной на с помощью рассмотренных
- 75. График переходной функции к примеру определения динамических характеристик объекта
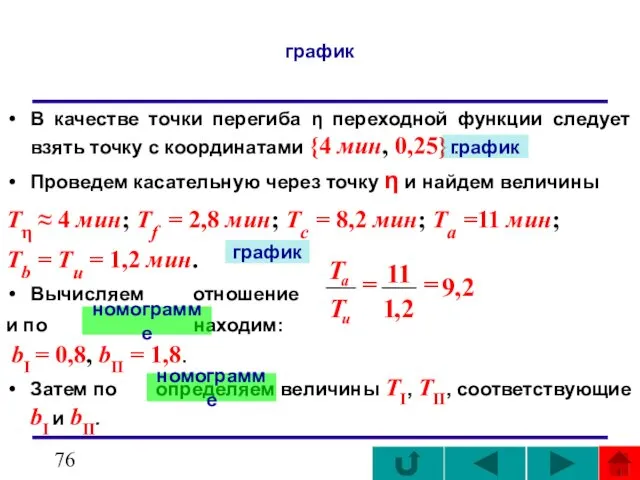
- 76. график В качестве точки перегиба η переходной функции следует взять точку с координатами {4 мин, 0,25}
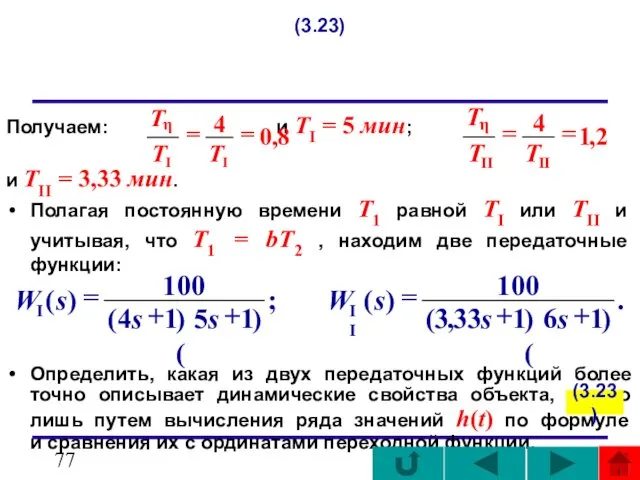
- 77. (3.23) Получаем: и TI = 5 мин; и TII = 3,33 мин. Полагая постоянную времени T1
- 78. Подобный просчет и сравнение для данного примера показывают, что при малых значениях времени 0 ≤ t
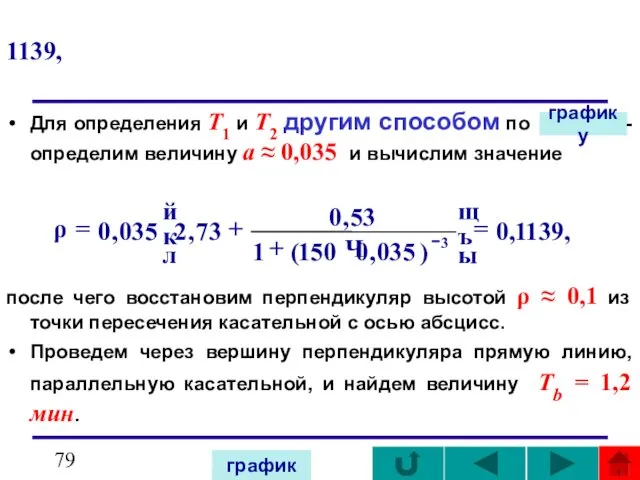
- 79. 1139, Для определения T1 и T2 другим способом по - определим величину а ≈ 0,035 и
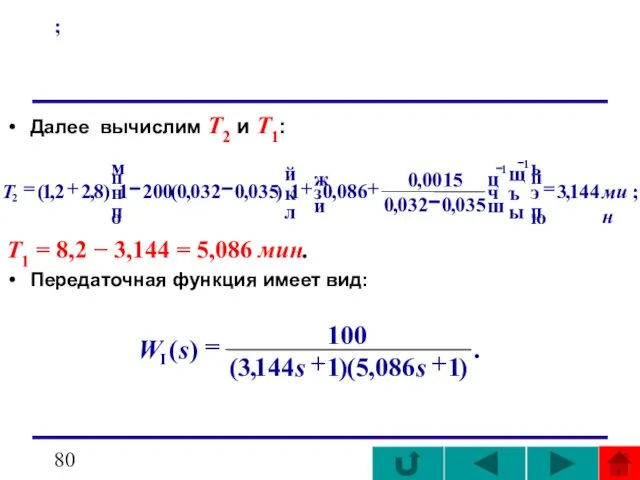
- 80. ; Далее вычислим T2 и T1: Т1 = 8,2 − 3,144 = 5,086 мин. Передаточная функция
- 81. номограмме Для нахождения постоянных времени методом Ольденбурга и Сарториуса вычисляем отношение и по определяем и .
- 82. 4.2. Определение постоянных времени T1 и T2 интерполяционными методами Это весьма многочисленная группа методов нахождения динамических
- 83. (3.23) Обозначим: T1 + T2 = T; и, разделив h(t) на h∞ ≈ h(TУСТ), преобразуем выражение
- 84. 0 По графику кривой h0(t) определяются величины , , , являющиеся ординатами h0(t) при соответствующих аргументах
- 85. 1 Соотношение T ≈ t7/1,2 получено эмпирическим путем, так как при различных соотношениях и оказалось, что
- 86. Номограмма для нахождения коэффициентов дифференциального уравнения интерполяционным методом Зависимость t7= f(z2)
- 87. 0 Проверка справедливости аппроксимации заданной функции h(t) выражением при τ = 0 выполняется путем определения по
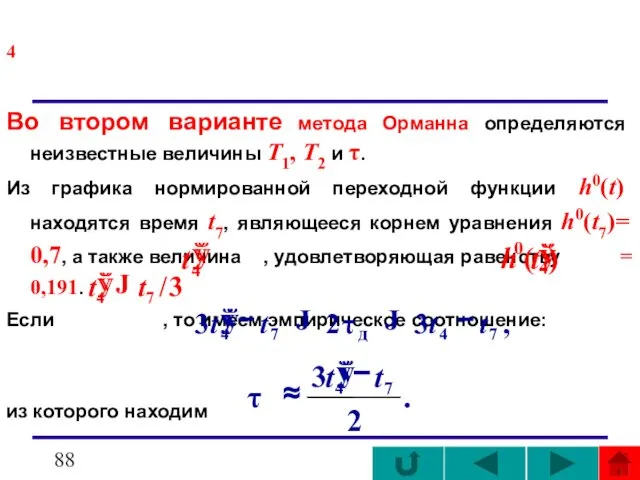
- 88. 4 Во втором варианте метода Орманна определяются неизвестные величины T1, T2 и τ. Из графика нормированной
- 89. 0 Далее все операции по определению T1 и T2 выполняются по первому варианту, однако всюду вместо
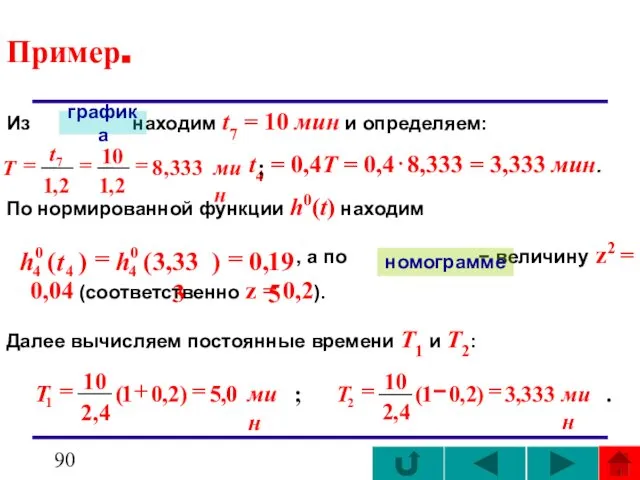
- 90. Пример. Из находим t7 = 10 мин и определяем: t4 = 0,4T = 0,4⋅8,333 = 3,333
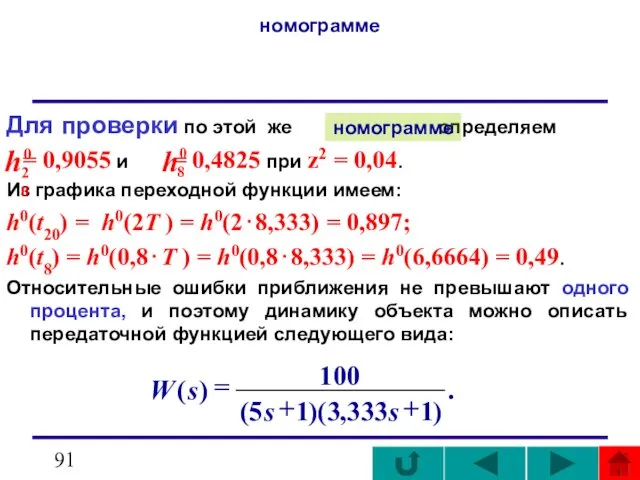
- 91. номограмме Для проверки по этой же определяем = 0,9055 и = 0,4825 при z2 = 0,04.
- 92. Достоинства и недостатки интерполяционных методов Аппроксимация переходных функций решением уравнения типа с помощью интерполяционных приемов обладает
- 93. 5. Аппроксимация переходной функции решением дифференциального уравнения первого порядка Большинство динамических объектов нефтяной и газовой промышленности
- 94. (2.9) Изображение Y(s) по Лапласу функции y(t) можно определить по таблицам преобразования Лапласа или, используя формулу
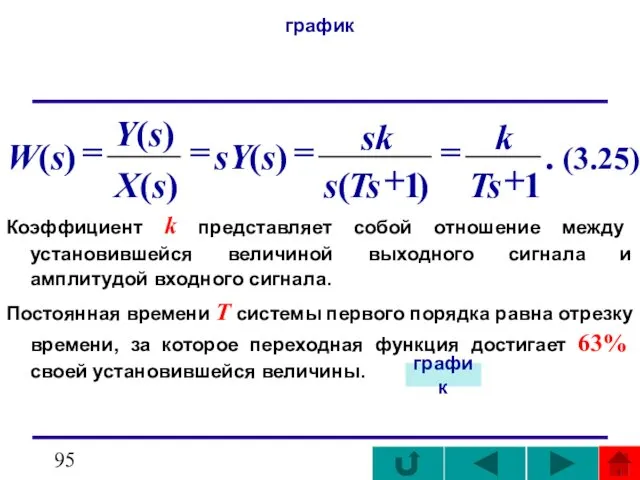
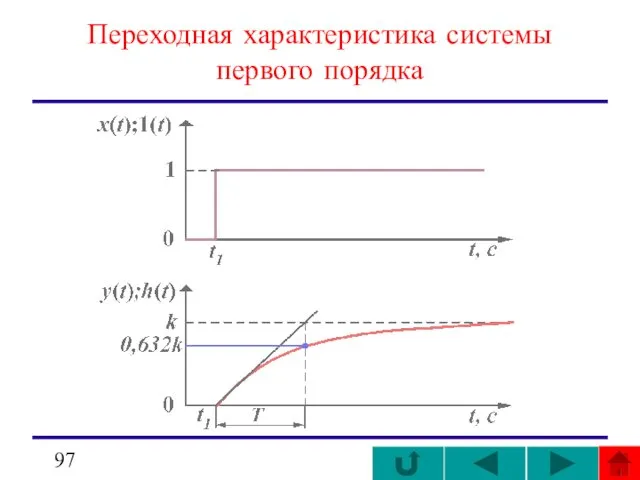
- 95. график Коэффициент k представляет собой отношение между установившейся величиной выходного сигнала и амплитудой входного сигнала. Постоянная
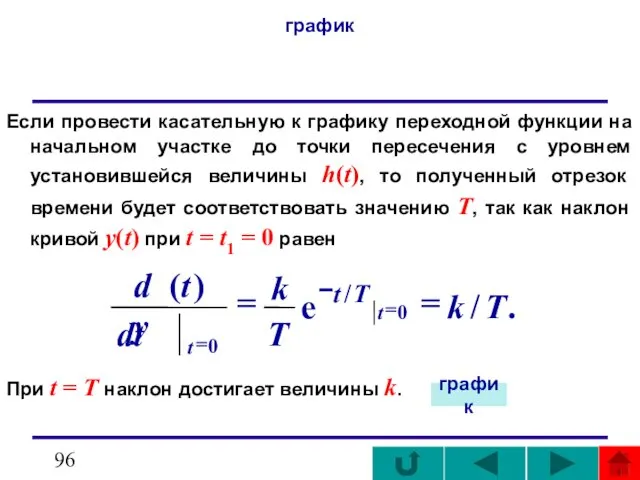
- 96. график Если провести касательную к графику переходной функции на начальном участке до точки пересечения с уровнем
- 97. Переходная характеристика системы первого порядка
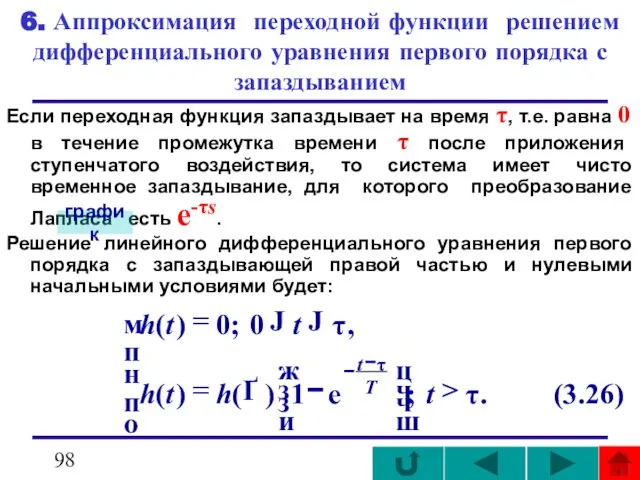
- 98. 6. Аппроксимация переходной функции решением дифференциального уравнения первого порядка с запаздыванием Если переходная функция запаздывает на
- 99. , (3.27) Аппроксимирующая передаточная функция будет иметь вид: Коэффициент усиления k находится обычным способом: k =
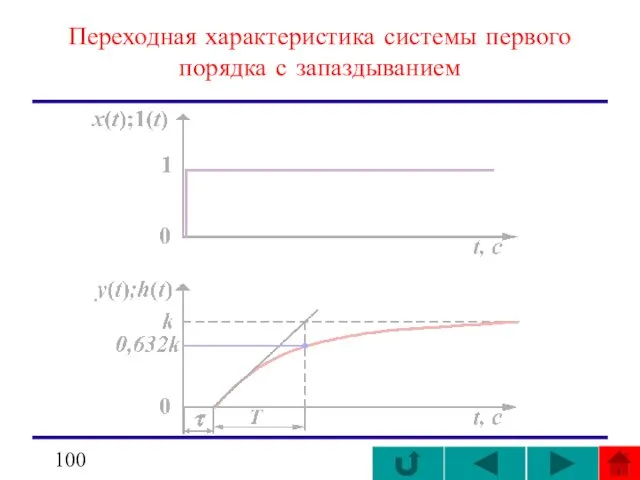
- 100. Переходная характеристика системы первого порядка с запаздыванием
- 101. график Если при определении значений T и τ по графику переходной функции возникают определенные трудности, то
- 102. . Аппроксимирующая кривая ( ) будет пересекать экспериментальную переходную функцию в начале координат, точках A и
- 103. Определение T и τ интерполяционным методом
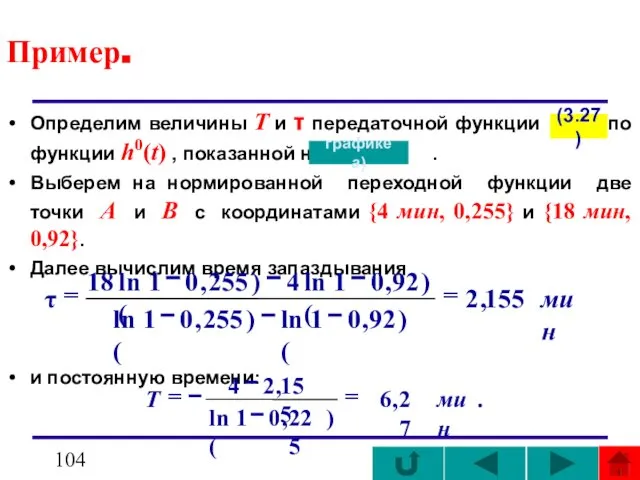
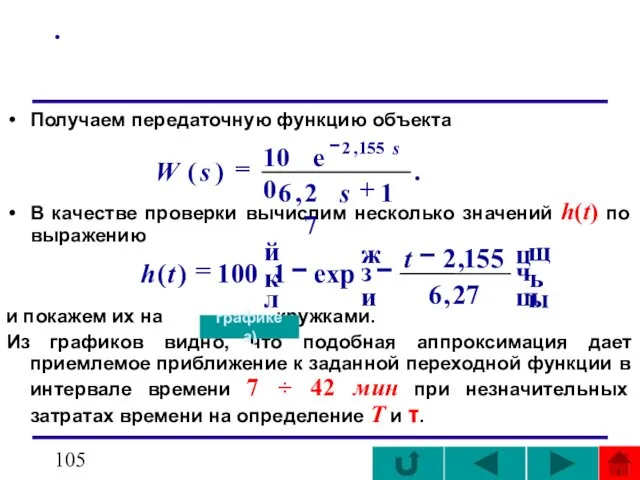
- 104. Пример. Определим величины Т и τ передаточной функции по функции h0(t) , показанной на . Выберем
- 105. . Получаем передаточную функцию объекта В качестве проверки вычислим несколько значений h(t) по выражению и покажем
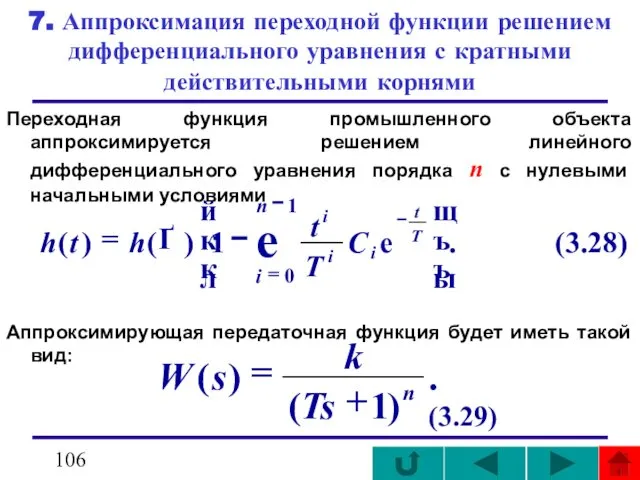
- 106. 7. Аппроксимация переходной функции решением дифференциального уравнения с кратными действительными корнями Переходная функция промышленного объекта аппроксимируется
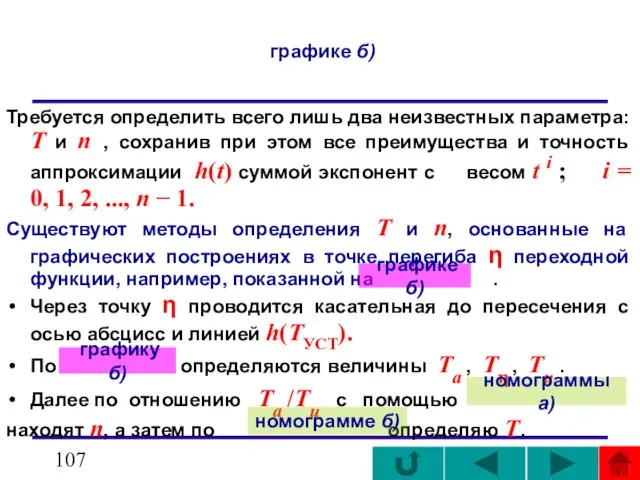
- 107. графике б) Требуется определить всего лишь два неизвестных параметра: Т и n , сохранив при этом
- 108. Номограммы для нахождения коэффициентов дифференциального уравнения с кратными корнями
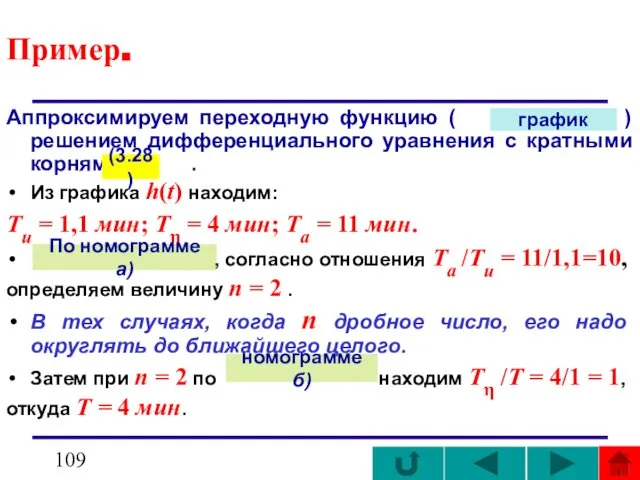
- 109. Пример. Аппроксимируем переходную функцию ( ) решением дифференциального уравнения с кратными корнями . Из графика h(t)
- 110. (3.28) Передаточная функция будет иметь следующий вид: Проверка точности аппроксимации осуществляется путем вычисления ряда значений h(t)
- 111. 8. Аппроксимация переходных функций объектов, содержащих интегрирующие звенья В общем случае дифференциальное уравнение движений выходной координаты
- 112. (3.30) Уравнение можно легко свести к обычному для нас уравнению типа . Это достигается подстановкой dly(t)
- 113. Переходные функции объектов с интегрирующими свойствами При известной форме испытательного входного воздействия x(t) нетрудно по виду
- 114. , Аппроксимирующая передаточная функция, согласно - имеет полюс кратности l в начале координат и может быть
- 115. На практике чаще применяют графические методы аппроксимации переходных функций объектов с интегрирующими свойствами. В тех случаях,
- 116. Определение коэффициентов передаточной функции объекта с интегрирующими свойствами
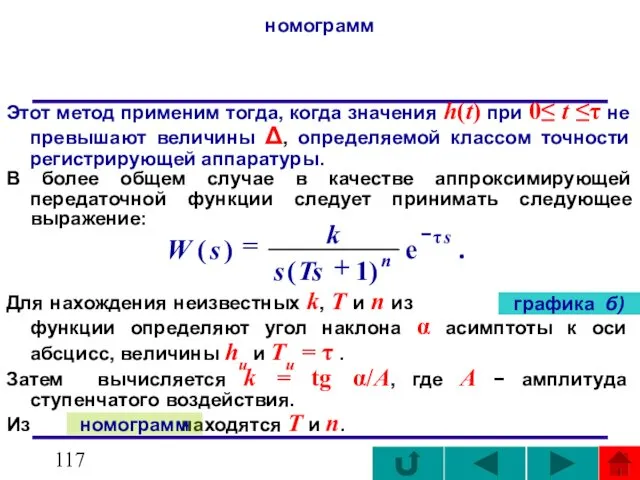
- 117. номограмм Этот метод применим тогда, когда значения h(t) при 0≤ t ≤τ не превышают величины Δ,
- 118. Номограммы для нахождения коэффициентов дифференциального уравнения объекта с интегрирующими свойствами
- 119. End
- 120. Формула (2.9)
- 122. Скачать презентацию
МЕТОДЫ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ОБЪЕКТОВ ПО ПЕРЕХОДНЫМ ФУНКЦИЯМ
Основной признак классификации
МЕТОДЫ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ОБЪЕКТОВ ПО ПЕРЕХОДНЫМ ФУНКЦИЯМ
Основной признак классификации

Известно, что решение линейного дифференциального уравнения с постоянными коэффициентами и нулевыми
Известно, что решение линейного дифференциального уравнения с постоянными коэффициентами и нулевыми

1. АППРОКСИМАЦИЯ ПЕРЕХОДНОЙ ФУНКЦИИ РЕШЕНИЕМ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ С ПРОСТЫМИ ВЕЩЕСТВЕННЫМИ КОРНЯМИ
1. АППРОКСИМАЦИЯ ПЕРЕХОДНОЙ ФУНКЦИИ РЕШЕНИЕМ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ С ПРОСТЫМИ ВЕЩЕСТВЕННЫМИ КОРНЯМИ
. (3.15)
Эти условия означают, что аппроксимирующая функция W(s) имеет только вещественные
. (3.15)
Эти условия означают, что аппроксимирующая функция W(s) имеет только вещественные
,
Идея метода заключается в последовательном приближении h(t) вначале решением уравнения первого
,
Идея метода заключается в последовательном приближении h(t) вначале решением уравнения первого
(3.15)
Последовательность действий при его применении следующая.
По условию все корни αi
(3.15)
Последовательность действий при его применении следующая.
По условию все корни αi
t
или
Это соотношение верно при больших значениях времени t, когда влиянием
t
или
Это соотношение верно при больших значениях времени t, когда влиянием
,
Для этого вычисляется функция h1(t) = C0 − h(t) и строится
,
Для этого вычисляется функция h1(t) = C0 − h(t) и строится
t
Если h(t) действительно является решением дифференциального уравнения первого порядка, то
t
Если h(t) действительно является решением дифференциального уравнения первого порядка, то

)
Можно построить функцию h2(t) на графике в полулогарифмическом масштабе по оси
)
Можно построить функцию h2(t) на графике в полулогарифмическом масштабе по оси
(3.14)
Процесс приближения h(t) выражением - прекращается тогда, когда функция hn(t)
(3.14)
Процесс приближения h(t) выражением - прекращается тогда, когда функция hn(t)
. (3.16)
При правильном определении параметров αi и Ci должны выполняться следующие
. (3.16)
При правильном определении параметров αi и Ci должны выполняться следующие
. (3.17)
Далее (согласно ) получим передаточную функцию объекта W(s), положив x(t)
. (3.17)
Далее (согласно ) получим передаточную функцию объекта W(s), положив x(t)
.
Следует указать, что определение коэффициентов Сi и корней αi осуществляется по
.
Следует указать, что определение коэффициентов Сi и корней αi осуществляется по
Достоинства и недостатки метода
Рассмотренный метод аппроксимации h(t) решением линейного дифференциального уравнения
Достоинства и недостатки метода
Рассмотренный метод аппроксимации h(t) решением линейного дифференциального уравнения
Пример.
Поясним изложенную методику примером определения коэффициентов W(s) по гладкой переходной функции,
Пример.
Поясним изложенную методику примером определения коэффициентов W(s) по гладкой переходной функции,

Таблица 1. Данные для примера определения модели объекта
Таблица 1. Данные для примера определения модели объекта

Графики к примеру определения коэффициентов W(s) методом последовательного логарифмирования
График б)
График
Графики к примеру определения коэффициентов W(s) методом последовательного логарифмирования
График б)
График
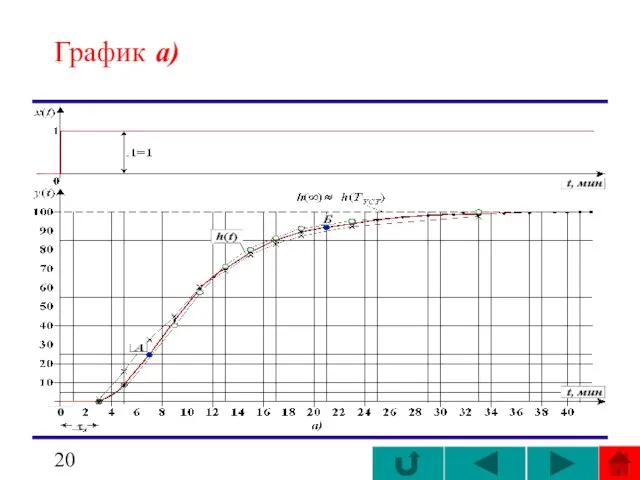
График а)
График а)

График б)
График б)
таблице 2
Величина С0 равна в данном случае h(42) = 100.
таблице 2
Величина С0 равна в данном случае h(42) = 100.

таблицу 2
Вычислим функцию при ti = 0, 2, 4, …,
таблицу 2
Вычислим функцию при ti = 0, 2, 4, …,
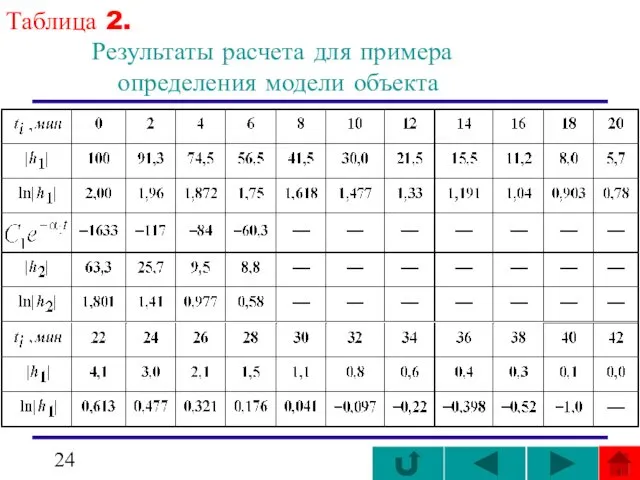
Таблица 2.
Результаты расчета для примера определения модели объекта
Таблица 2.
Результаты расчета для примера определения модели объекта
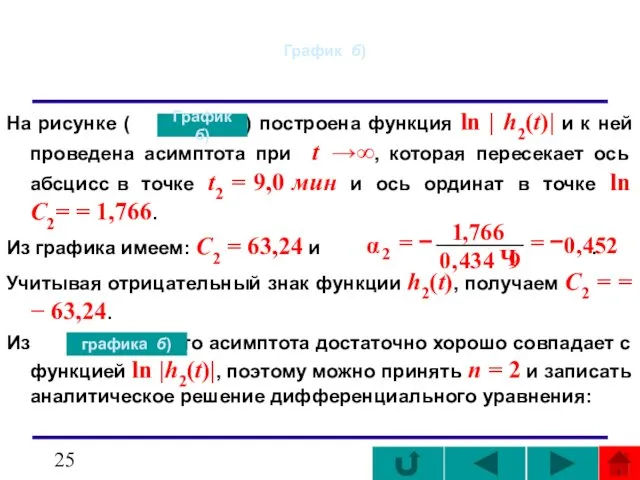
График б)
На рисунке ( ) построена функция ln | h2(t)| и
График б)
На рисунке ( ) построена функция ln | h2(t)| и
(
Проведем проверку «начальных условий» согласно :
h(0)=C0 − C1 − С2 =
(
Проведем проверку «начальных условий» согласно :
h(0)=C0 − C1 − С2 =
.
Вывод.
Достигнутая точность приближения математического описания переходной функции h(t) в виде суммы
.
Вывод.
Достигнутая точность приближения математического описания переходной функции h(t) в виде суммы
2. АППРОКСИМАЦИЯ ПЕРЕХОДНОЙ ФУНКЦИИ РЕШЕНИЕМ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ С ПРОСТЫМИ КОМПЛЕКСНЫМИ КОРНЯМИ
2. АППРОКСИМАЦИЯ ПЕРЕХОДНОЙ ФУНКЦИИ РЕШЕНИЕМ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ С ПРОСТЫМИ КОМПЛЕКСНЫМИ КОРНЯМИ
), (3.18)
Последовательность действий нахождения коэффициентов W(s) такова.
Из переходной функции h(t) (
), (3.18)
Последовательность действий нахождения коэффициентов W(s) такова.
Из переходной функции h(t) (

Переходная функция колебательного объекта
Переходная функция колебательного объекта
.
Как уже отмечалось, метод последовательного логарифмирования дает хорошие результаты, если выполняется
.
Как уже отмечалось, метод последовательного логарифмирования дает хорошие результаты, если выполняется
График
Величина βi находится достаточно просто, если известен период T1 колебаний
График
Величина βi находится достаточно просто, если известен период T1 колебаний
,
Для значений времени t = tэg справедливо равенство
или после логарифмирования получим
,
Для значений времени t = tэg справедливо равенство
или после логарифмирования получим
),
Далее вычисляется функция «невязки» h2(tэg):
учитывающая влияние других составляющих ряда на форму
),
Далее вычисляется функция «невязки» h2(tэg):
учитывающая влияние других составляющих ряда на форму
.
Коэффициенты С2, α2, β2, ϕ2 определяются приемами, которые использовались для определения
.
Коэффициенты С2, α2, β2, ϕ2 определяются приемами, которые использовались для определения
.
Далее записывается уравнение передаточной функции
Если коэффициенты Ci , αi , βi
.
Далее записывается уравнение передаточной функции
Если коэффициенты Ci , αi , βi
;
Определение некоторых коэффициентов опирается на знание периода колебаний функции h(t), который
;
Определение некоторых коэффициентов опирается на знание периода колебаний функции h(t), который
1
Вывод.
Если достигнута требуемая точность приближения математического описания рассматриваемой переходной функции h(t),
1
Вывод.
Если достигнута требуемая точность приближения математического описания рассматриваемой переходной функции h(t),
3. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНОЙ ФУНКЦИИ МЕТОДОМ «ПЛОЩАДЕЙ»
Пусть требуется по таблично
3. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНОЙ ФУНКЦИИ МЕТОДОМ «ПЛОЩАДЕЙ»
Пусть требуется по таблично
. (3.19)
Некоторые из коэффициентов bп, bn − 1, bп− 2, …
. (3.19)
Некоторые из коэффициентов bп, bn − 1, bп− 2, …
i
Суть метода заключается в разложении функции
в «усеченный» ряд по степеням
i
Суть метода заключается в разложении функции
в «усеченный» ряд по степеням
т
где L{k − h0} − преобразованная по Лапласу функция [k −
т
где L{k − h0} − преобразованная по Лапласу функция [k −

1
Предел последнего выражения при s → 0 равен , поэтому получаем
1
Предел последнего выражения при s → 0 равен , поэтому получаем
.
Используя выражение для H1(s), найдем изображение функции «невязок» :
.
Используя выражение для H1(s), найдем изображение функции «невязок» :
,
Площадь «второго порядка» равна:
так как функция
стремится при s → 0
,
Площадь «второго порядка» равна:
так как функция
стремится при s → 0
3
Далее вводится переходная функция h2(t), по аналогии находится и т.д.
В
3
Далее вводится переходная функция h2(t), по аналогии находится и т.д.
В
т
Практическое использование последнего выражения затрудняется как сложностью вычисления Si , так
т
Практическое использование последнего выражения затрудняется как сложностью вычисления Si , так
т
В частности, при n = 2 имеем:
а при n =
т
В частности, при n = 2 имеем:
а при n =
i
Коэффициенты исходной передаточной функции
связаны с величинами или, точнее, с «площадями»
i
Коэффициенты исходной передаточной функции
связаны с величинами или, точнее, с «площадями»
Некоторые рекомендации при использовании метода «площадей»
В общем случае при определении
Некоторые рекомендации при использовании метода «площадей»
В общем случае при определении
;
Порядок передаточной функции п определяется по величинам «площадей» :
если Si мало
;
Порядок передаточной функции п определяется по величинам «площадей» :
если Si мало

(3.21)
Метод «площадей» не связан с графическими построениями и может быть
(3.21)
Метод «площадей» не связан с графическими построениями и может быть
Пример.
Рассмотрим пример определения коэффициентов передаточной функции методом «площадей» по переходной функции,
Пример.
Рассмотрим пример определения коэффициентов передаточной функции методом «площадей» по переходной функции,

мин .
Затем одним из известных методов численного интегрирования находим величину
В нашем
мин .
Затем одним из известных методов численного интегрирования находим величину
В нашем
1
Так как ни по виду начального участка h(t), ни из анализа
1
Так как ни по виду начального участка h(t), ни из анализа
1
Переходим от нормированной передаточной функции к обычной функции W(s):
или с учетом
1
Переходим от нормированной передаточной функции к обычной функции W(s):
или с учетом
таблице 1
Выводы к примеру.
Значения функции y(t), являющейся решением дифференциального уравнения
таблице 1
Выводы к примеру.
Значения функции y(t), являющейся решением дифференциального уравнения
4. АППРОКСИМАЦИЯ ПЕРЕХОДНОЙ ФУНКЦИИ РЕШЕНИЕМ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ ВТОРОГО ПОРЯДКА
При использовании данного
4. АППРОКСИМАЦИЯ ПЕРЕХОДНОЙ ФУНКЦИИ РЕШЕНИЕМ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ ВТОРОГО ПОРЯДКА
При использовании данного
; (3.23)
Следовательно переходная функция объекта h(t) должна быть аппроксимирована решением линейного
; (3.23)
Следовательно переходная функция объекта h(t) должна быть аппроксимирована решением линейного
(3.22)
Так как время чистого запаздывания τ и коэффициент усиления k определяются
(3.22)
Так как время чистого запаздывания τ и коэффициент усиления k определяются
%,
Заранее заданная структура передаточной функции - всегда вызывает сомнения в справедливости
%,
Заранее заданная структура передаточной функции - всегда вызывает сомнения в справедливости
(3.22)
Если величина δg не превышает 2 ÷ 3%, то можно считать
(3.22)
Если величина δg не превышает 2 ÷ 3%, то можно считать
4.1. Определение постоянных времени объекта T1 и T2 с помощью графических
4.1. Определение постоянных времени объекта T1 и T2 с помощью графических
Определение коэффициентов дифференциального уравнения второго порядка с помощью графических построений
Определение коэффициентов дифференциального уравнения второго порядка с помощью графических построений

График б)
График б)
Так как переходные функции многих промышленных объектов не имеют явно выраженной
Так как переходные функции многих промышленных объектов не имеют явно выраженной
.
Далее возможны два варианта определения постоянных времени объекта T1 и T2.
.
Далее возможны два варианта определения постоянных времени объекта T1 и T2.

[
Через точку 3 проводится прямая линия В, параллельная касательной А, и
[
Через точку 3 проводится прямая линия В, параллельная касательной А, и
из графика б)
Во втором варианте h0(t) или h(t) находятся величины
из графика б)
Во втором варианте h0(t) или h(t) находятся величины
номограммам
По известной величине отношения Tc к Ta , находящейся в
номограммам
По известной величине отношения Tc к Ta , находящейся в

Достоинства и недостатки метода
Недостатки рассмотренных графических методов аппроксимации переходной функции решением
Достоинства и недостатки метода
Недостатки рассмотренных графических методов аппроксимации переходной функции решением
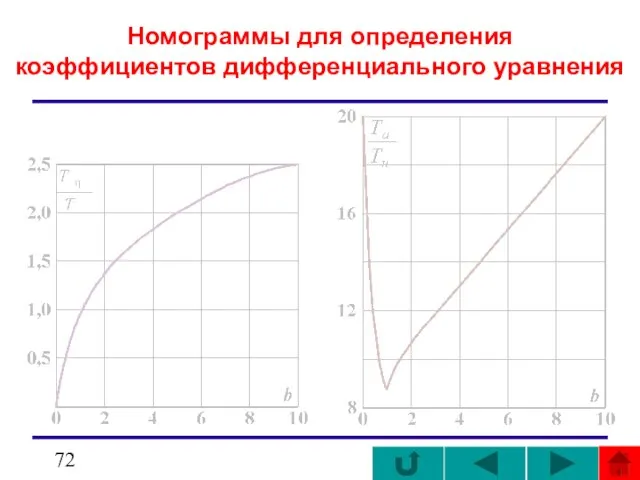
Номограммы для определения
коэффициентов дифференциального уравнения
Номограммы для определения
коэффициентов дифференциального уравнения
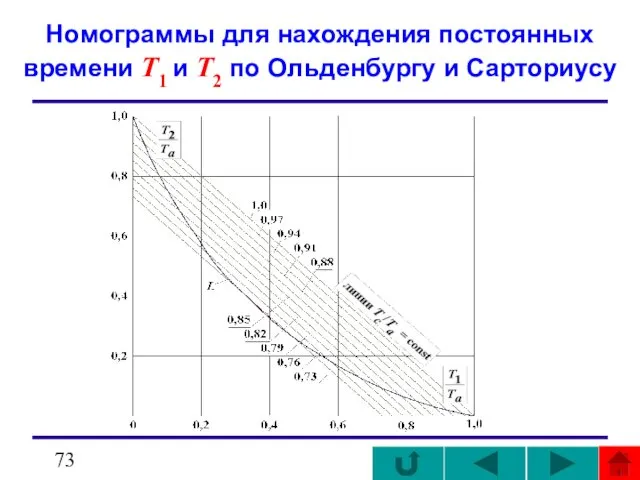
Номограммы для нахождения постоянных времени Т1 и T2 по Ольденбургу и
Номограммы для нахождения постоянных времени Т1 и T2 по Ольденбургу и

Пример.
Рассмотрим пример нахождения T1 и Т2 по переходной функции h0(t), показанной
Пример.
Рассмотрим пример нахождения T1 и Т2 по переходной функции h0(t), показанной
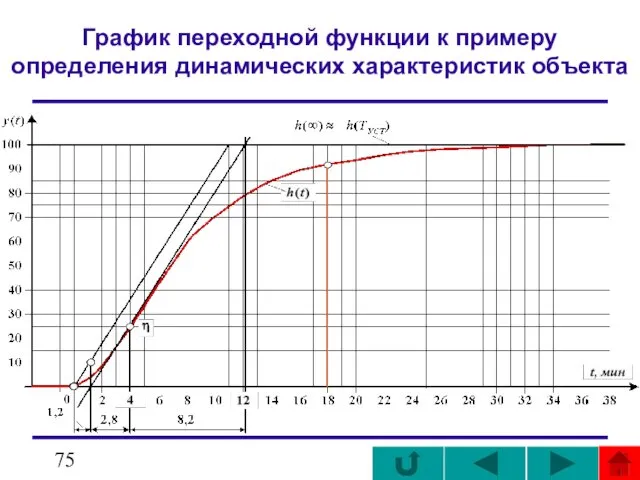
График переходной функции к примеру определения динамических характеристик объекта
График переходной функции к примеру определения динамических характеристик объекта
график
В качестве точки перегиба η переходной функции следует взять точку с
график
В качестве точки перегиба η переходной функции следует взять точку с
(3.23)
Получаем: и TI = 5 мин;
и TII = 3,33 мин.
Полагая
(3.23)
Получаем: и TI = 5 мин;
и TII = 3,33 мин.
Полагая
Подобный просчет и сравнение для данного примера показывают, что при малых
Подобный просчет и сравнение для данного примера показывают, что при малых
1139,
Для определения T1 и T2 другим способом по - определим величину
1139,
Для определения T1 и T2 другим способом по - определим величину
;
Далее вычислим T2 и T1:
Т1 = 8,2 − 3,144 = 5,086
;
Далее вычислим T2 и T1:
Т1 = 8,2 − 3,144 = 5,086

номограмме
Для нахождения постоянных времени методом Ольденбурга и Сарториуса вычисляем отношение
номограмме
Для нахождения постоянных времени методом Ольденбурга и Сарториуса вычисляем отношение
4.2. Определение постоянных времени T1 и T2 интерполяционными методами
Это весьма
4.2. Определение постоянных времени T1 и T2 интерполяционными методами
Это весьма

(3.23)
Обозначим: T1 + T2 = T;
и, разделив h(t) на h∞
(3.23)
Обозначим: T1 + T2 = T;
и, разделив h(t) на h∞
0
По графику кривой h0(t) определяются величины , , , являющиеся ординатами
0
По графику кривой h0(t) определяются величины , , , являющиеся ординатами

1
Соотношение T ≈ t7/1,2 получено эмпирическим путем, так как при различных
1
Соотношение T ≈ t7/1,2 получено эмпирическим путем, так как при различных
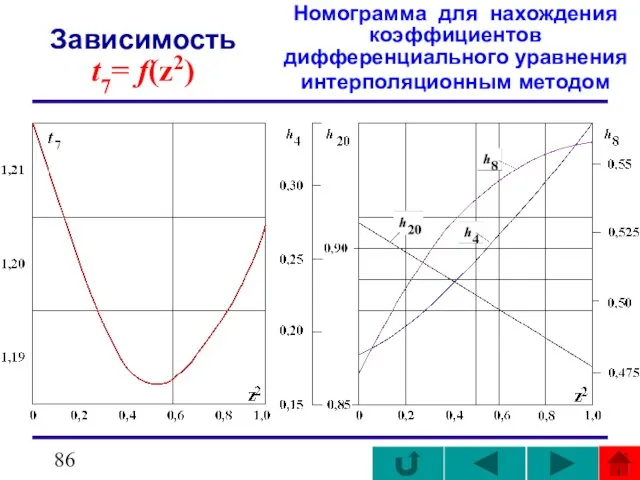
Номограмма для нахождения коэффициентов дифференциального уравнения интерполяционным методом
Зависимость
t7= f(z2)
Номограмма для нахождения коэффициентов дифференциального уравнения интерполяционным методом
Зависимость
t7= f(z2)
0
Проверка справедливости аппроксимации заданной функции h(t) выражением при τ = 0
0
Проверка справедливости аппроксимации заданной функции h(t) выражением при τ = 0
4
Во втором варианте метода Орманна определяются неизвестные величины T1, T2 и
4
Во втором варианте метода Орманна определяются неизвестные величины T1, T2 и
0
Далее все операции по определению T1 и T2 выполняются по первому
0
Далее все операции по определению T1 и T2 выполняются по первому
Пример.
Из находим t7 = 10 мин и определяем:
t4 =
Пример.
Из находим t7 = 10 мин и определяем:
t4 =
номограмме
Для проверки по этой же определяем
= 0,9055 и =
номограмме
Для проверки по этой же определяем
= 0,9055 и =
Достоинства и недостатки интерполяционных методов
Аппроксимация переходных функций решением уравнения типа с
Достоинства и недостатки интерполяционных методов
Аппроксимация переходных функций решением уравнения типа с

5. Аппроксимация переходной функции решением дифференциального уравнения первого порядка
Большинство динамических
5. Аппроксимация переходной функции решением дифференциального уравнения первого порядка
Большинство динамических
(2.9)
Изображение Y(s) по Лапласу функции y(t) можно определить по таблицам преобразования
(2.9)
Изображение Y(s) по Лапласу функции y(t) можно определить по таблицам преобразования
график
Коэффициент k представляет собой отношение между установившейся величиной выходного сигнала и
график
Коэффициент k представляет собой отношение между установившейся величиной выходного сигнала и
график
Если провести касательную к графику переходной функции на начальном участке до
график
Если провести касательную к графику переходной функции на начальном участке до
Переходная характеристика системы первого порядка
Переходная характеристика системы первого порядка
6. Аппроксимация переходной функции решением дифференциального уравнения первого порядка с запаздыванием
Если
6. Аппроксимация переходной функции решением дифференциального уравнения первого порядка с запаздыванием
Если

, (3.27)
Аппроксимирующая передаточная функция будет иметь вид:
Коэффициент усиления k находится обычным
, (3.27)
Аппроксимирующая передаточная функция будет иметь вид:
Коэффициент усиления k находится обычным
Переходная характеристика системы первого порядка с запаздыванием
Переходная характеристика системы первого порядка с запаздыванием

график
Если при определении значений T и τ по графику переходной функции
график
Если при определении значений T и τ по графику переходной функции

.
Аппроксимирующая кривая ( ) будет пересекать экспериментальную переходную функцию в начале
.
Аппроксимирующая кривая ( ) будет пересекать экспериментальную переходную функцию в начале

Определение T и τ интерполяционным методом
Определение T и τ интерполяционным методом
Пример.
Определим величины Т и τ передаточной функции по функции h0(t) ,
Пример.
Определим величины Т и τ передаточной функции по функции h0(t) ,
.
Получаем передаточную функцию объекта
В качестве проверки вычислим несколько значений h(t) по
.
Получаем передаточную функцию объекта
В качестве проверки вычислим несколько значений h(t) по
7. Аппроксимация переходной функции решением дифференциального уравнения с кратными действительными корнями
7. Аппроксимация переходной функции решением дифференциального уравнения с кратными действительными корнями
графике б)
Требуется определить всего лишь два неизвестных параметра: Т
графике б)
Требуется определить всего лишь два неизвестных параметра: Т

Номограммы для нахождения коэффициентов дифференциального уравнения с кратными корнями
Номограммы для нахождения коэффициентов дифференциального уравнения с кратными корнями
Пример.
Аппроксимируем переходную функцию ( ) решением дифференциального уравнения с кратными корнями
Пример.
Аппроксимируем переходную функцию ( ) решением дифференциального уравнения с кратными корнями

(3.28)
Передаточная функция будет иметь следующий вид:
Проверка точности аппроксимации осуществляется путем вычисления
(3.28)
Передаточная функция будет иметь следующий вид:
Проверка точности аппроксимации осуществляется путем вычисления

8. Аппроксимация переходных функций объектов, содержащих интегрирующие звенья
В общем случае дифференциальное
8. Аппроксимация переходных функций объектов, содержащих интегрирующие звенья
В общем случае дифференциальное
(3.30)
Уравнение можно легко свести к обычному для нас уравнению типа .
(3.30)
Уравнение можно легко свести к обычному для нас уравнению типа .

Переходные функции объектов
с интегрирующими свойствами
При известной форме испытательного входного
Переходные функции объектов
с интегрирующими свойствами
При известной форме испытательного входного
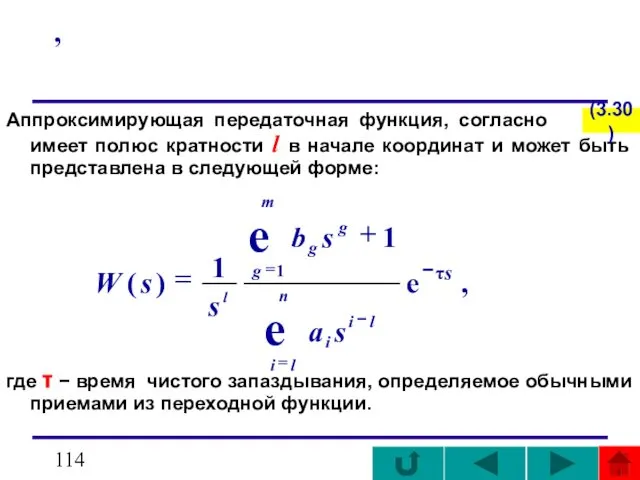
,
Аппроксимирующая передаточная функция, согласно - имеет полюс кратности l в начале
,
Аппроксимирующая передаточная функция, согласно - имеет полюс кратности l в начале
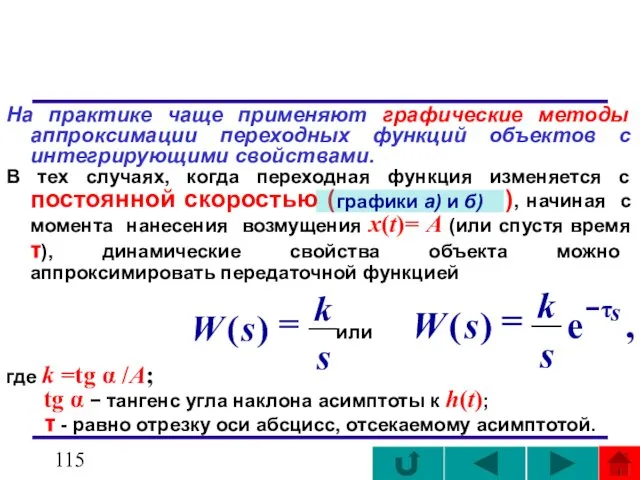
На практике чаще применяют графические методы аппроксимации переходных функций объектов
На практике чаще применяют графические методы аппроксимации переходных функций объектов
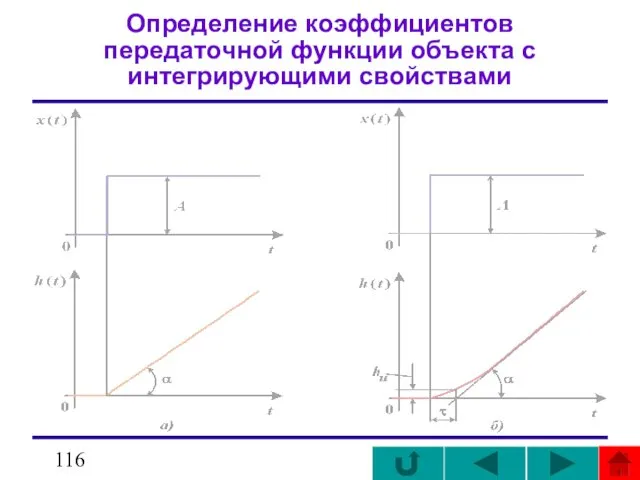
Определение коэффициентов передаточной функции объекта с интегрирующими свойствами
Определение коэффициентов передаточной функции объекта с интегрирующими свойствами
номограмм
Этот метод применим тогда, когда значения h(t) при 0≤ t
номограмм
Этот метод применим тогда, когда значения h(t) при 0≤ t

Номограммы для нахождения коэффициентов дифференциального уравнения объекта с интегрирующими свойствами
Номограммы для нахождения коэффициентов дифференциального уравнения объекта с интегрирующими свойствами
End
Формула (2.9)
Формула (2.9)
 Устный счёт. Математика 2 класс «Усвоение математической терминологии. Табличные случаи умножения и деления». Учите
Устный счёт. Математика 2 класс «Усвоение математической терминологии. Табличные случаи умножения и деления». Учите Матрицы. Определения
Матрицы. Определения Методы анализа выживаемости. Кривые Каплана-Майера. Cox-регрессия
Методы анализа выживаемости. Кривые Каплана-Майера. Cox-регрессия Сравнение десятичных дробей
Сравнение десятичных дробей Таблица умножения и деления на 5
Таблица умножения и деления на 5 Операции, функции, выражения
Операции, функции, выражения Основные понятия геометрии
Основные понятия геометрии Отрезок
Отрезок Парциальная программа «Математические ступеньки»
Парциальная программа «Математические ступеньки» АНАЛИЗ СОДЕРЖАНИЯ ЗАДАНИЙ ПО МАТЕМАТИКЕ ЕГЭ
АНАЛИЗ СОДЕРЖАНИЯ ЗАДАНИЙ ПО МАТЕМАТИКЕ ЕГЭ  Презентация на тему Площади и объёмы
Презентация на тему Площади и объёмы  Система линейных уравнений
Система линейных уравнений Комбинаторика. Формулы сложения и произведения. Примеры
Комбинаторика. Формулы сложения и произведения. Примеры Погрешности измерений и их классификация
Погрешности измерений и их классификация Счет предметов. Число и цифра 2
Счет предметов. Число и цифра 2 Презентация по математике "Решение уравнений" - скачать бесплатно_
Презентация по математике "Решение уравнений" - скачать бесплатно_ Историческая справка. Векторы
Историческая справка. Векторы Неопределенный интеграл и его свойства
Неопределенный интеграл и его свойства Многочлен. Урок математики 7 класс
Многочлен. Урок математики 7 класс Изображение трехмерных объектов
Изображение трехмерных объектов Что такое математическая модель
Что такое математическая модель Формирование основных компетенций на уроках математики
Формирование основных компетенций на уроках математики Решение простейших тригонометрических неравенств (10 класс)
Решение простейших тригонометрических неравенств (10 класс) Расположение предметов (1 класс)
Расположение предметов (1 класс) Множества в начальном обучении математике
Множества в начальном обучении математике Чтение дробей
Чтение дробей Своя игра 1
Своя игра 1 Аксіоми стереометрії та наслідки з них
Аксіоми стереометрії та наслідки з них