- Общая характеристика дисциплины

Содержание
- 2. 1.2. Задачами дисциплины Задачами являются получение практических навыков по расчету погрешностей измерительных устройств, по применению конструктивно-технологических
- 3. В результате изучения дисциплины студент должен знать: характер погрешностей измерительных устройств статического и астатического уравновешивания, особенности
- 4. По итогам изучения дисциплины студент должен уметь и владеть навыками: проводить расчет погрешностей измерительных устройств уравновешивающего
- 5. 1.3 Учебно-методическое обеспечение дисциплины Основная литература: 1. Солдаткин В.М., Солдаткин В.В., Никитин А.В. Основы проектирования измерительных
- 6. 2. ЗНАНИЯ, НЕОБХОДИМЫЕ ДЛЯ ОСВОЕНИЯ ДИСЦИПЛИНЫ Вопросы обеспечения точности измерительных приборов и систем, которые являются предметом
- 7. Основные понятия и классификация погрешностей Одной из основных характеристик измерительных приборов и систем является точность, которая
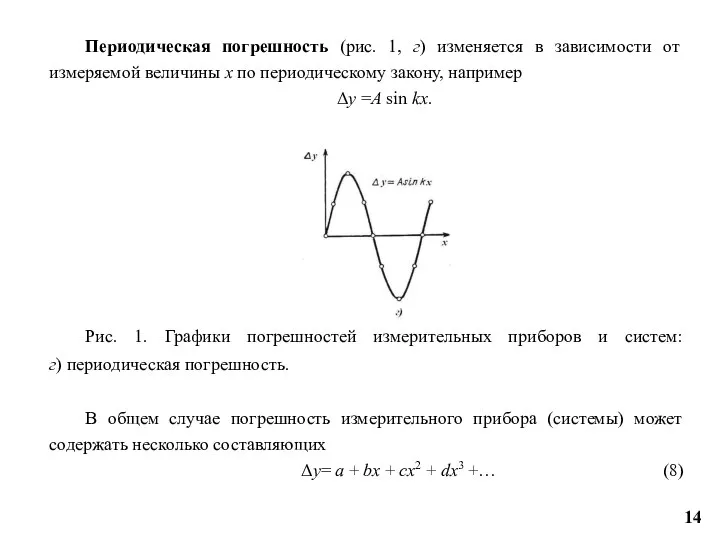
- 8. Погрешностью Δy измерительного прибора, системы и иного средства измерения называется разность между значением y(t) выходного сигнала
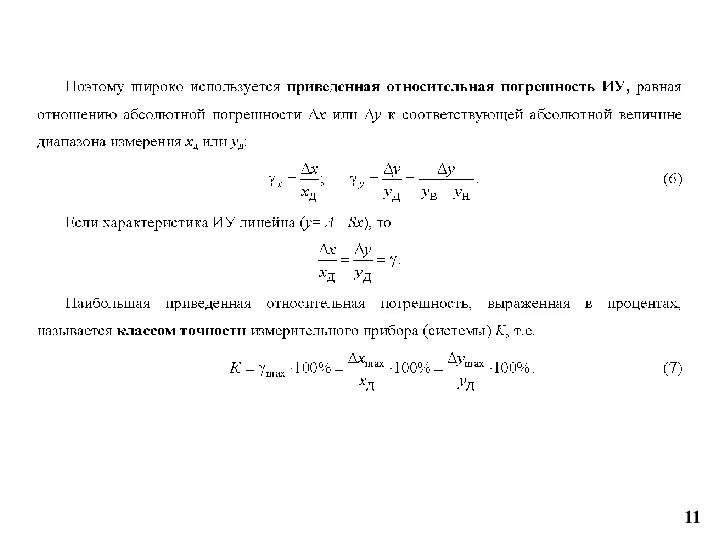
- 9. Классификация погрешностей по размерности В зависимости от размерности различают: абсолютные погрешности, относительные погрешности, приведенные относительные погрешности.
- 10. 10
- 11. 11
- 12. Классификация погрешностей по характеру связи между величиной погрешности и уровнем сигнала В зависимости от характера связи
- 13. 13
- 14. Периодическая погрешность (рис. 1, г) изменяется в зависимости от измеряемой величины x по периодическому закону, например
- 15. Классификация погрешностей по закономерности их появления при многократных измерениях Если в основу классификации положить повторяемость погрешностей
- 16. Случайные погрешности – это погрешности, имеющие рассеяние по величине и знаку при многократных испытаниях (измерениях) в
- 17. 17
- 18. Входящие в эту формулу параметры в соответствии со стандартной атмосферой СА-73, принимаются равными некоторым постоянным значениям:
- 19. Классификация погрешностей по характеру изменения во времени По данному признаку погрешности измерительных приборов и систем можно
- 20. Классификация погрешностей в зависимости от условий работы прибора или системы Практика технических измерений показывает, что экспериментальная
- 21. Основная статическая погрешность прибора или системы возникает под влиянием многих факторов, она формируется на всех этапах
- 22. Дополнительной погрешностью называется та часть статической погрешности, которая добавляется к основной погрешности при отклонении условий работы
- 23. Можно рассматривать частную дополнительную погрешность, т.е. погрешность, возникающую под влиянием только одного дестабилизирующего фактора, например дополнительную
- 24. Источниками собственной динамической погрешности являются инерционные и демпфирующие элементы прибора (системы), характеризуемые определенными параметрами (массой, моментом
- 26. Скачать презентацию

1.2. Задачами дисциплины
Задачами являются получение практических навыков по расчету
погрешностей
1.2. Задачами дисциплины
Задачами являются получение практических навыков по расчету
погрешностей

В результате изучения дисциплины студент должен знать:
характер погрешностей измерительных устройств
В результате изучения дисциплины студент должен знать:
характер погрешностей измерительных устройств
По итогам изучения дисциплины студент должен уметь и владеть
навыками:
проводить
По итогам изучения дисциплины студент должен уметь и владеть
навыками:
проводить

1.3 Учебно-методическое обеспечение дисциплины
Основная литература:
1. Солдаткин В.М., Солдаткин В.В., Никитин
1.3 Учебно-методическое обеспечение дисциплины
Основная литература:
1. Солдаткин В.М., Солдаткин В.В., Никитин
2. ЗНАНИЯ, НЕОБХОДИМЫЕ ДЛЯ ОСВОЕНИЯ ДИСЦИПЛИНЫ
Вопросы обеспечения точности измерительных приборов и
2. ЗНАНИЯ, НЕОБХОДИМЫЕ ДЛЯ ОСВОЕНИЯ ДИСЦИПЛИНЫ
Вопросы обеспечения точности измерительных приборов и

Основные понятия и классификация погрешностей
Одной из основных характеристик измерительных приборов и
Основные понятия и классификация погрешностей
Одной из основных характеристик измерительных приборов и
Погрешностью Δy измерительного прибора, системы и иного средства измерения называется разность
Погрешностью Δy измерительного прибора, системы и иного средства измерения называется разность

Классификация погрешностей по размерности
В зависимости от размерности различают: абсолютные погрешности,
Классификация погрешностей по размерности
В зависимости от размерности различают: абсолютные погрешности,

10
10
11
11

Классификация погрешностей по характеру связи между величиной погрешности и уровнем сигнала
В
Классификация погрешностей по характеру связи между величиной погрешности и уровнем сигнала
В

13
13
Периодическая погрешность (рис. 1, г) изменяется в зависимости от измеряемой величины
Периодическая погрешность (рис. 1, г) изменяется в зависимости от измеряемой величины

Классификация погрешностей по закономерности их появления при многократных измерениях
Если в основу
Классификация погрешностей по закономерности их появления при многократных измерениях
Если в основу
Случайные погрешности – это погрешности, имеющие рассеяние по величине и знаку
Случайные погрешности – это погрешности, имеющие рассеяние по величине и знаку

17
17

Входящие в эту формулу параметры в соответствии со стандартной атмосферой СА-73,
Входящие в эту формулу параметры в соответствии со стандартной атмосферой СА-73,

Классификация погрешностей по характеру изменения во времени
По данному признаку погрешности измерительных
Классификация погрешностей по характеру изменения во времени
По данному признаку погрешности измерительных

Классификация погрешностей в зависимости от условий работы
прибора или системы
Практика технических
Классификация погрешностей в зависимости от условий работы
прибора или системы
Практика технических

Основная статическая погрешность прибора или системы возникает под влиянием многих факторов,
Основная статическая погрешность прибора или системы возникает под влиянием многих факторов,
Дополнительной погрешностью называется та часть статической погрешности, которая добавляется к основной
Дополнительной погрешностью называется та часть статической погрешности, которая добавляется к основной

Можно рассматривать частную дополнительную погрешность, т.е. погрешность, возникающую под влиянием только
Можно рассматривать частную дополнительную погрешность, т.е. погрешность, возникающую под влиянием только

Источниками собственной динамической погрешности являются инерционные и демпфирующие элементы прибора (системы),
Источниками собственной динамической погрешности являются инерционные и демпфирующие элементы прибора (системы),
 Разложение определителя. Нахождение обратной матрицы
Разложение определителя. Нахождение обратной матрицы ОГЭ 2019. Модуль «Геометрия»
ОГЭ 2019. Модуль «Геометрия» Умножение натуральных чисел и его свойства Учитель математики ГБОУ ЦО № 354 Лодзь О.В.
Умножение натуральных чисел и его свойства Учитель математики ГБОУ ЦО № 354 Лодзь О.В. Многограники (призма, паралелепіпед, конус)
Многограники (призма, паралелепіпед, конус) Координатная плоскость
Координатная плоскость Сложение отрицательных чисел и чисел с разными знаками
Сложение отрицательных чисел и чисел с разными знаками Понятие вектора. Равенство векторов
Понятие вектора. Равенство векторов Векторы и их применение при доказательстве теорем
Векторы и их применение при доказательстве теорем Периметр и площадь прямоугольников
Периметр и площадь прямоугольников Вводный урок 1. 8 класс. Геометрия
Вводный урок 1. 8 класс. Геометрия Показательные уравнения
Показательные уравнения Геометрические фракталы. L-системы
Геометрические фракталы. L-системы Письменное деление на числа, оканчивающиеся нулями
Письменное деление на числа, оканчивающиеся нулями Формулы приведения
Формулы приведения Умножение и деление. Закрепление
Умножение и деление. Закрепление Таблицы сложения и вычитания с числом 2
Таблицы сложения и вычитания с числом 2 Моделирование систем. 2 лекция ББИ
Моделирование систем. 2 лекция ББИ Логарифмы. Логарифмическая функция. 11 класс
Логарифмы. Логарифмическая функция. 11 класс Открой свою звезду. Математический диктант
Открой свою звезду. Математический диктант Теорема Чевы
Теорема Чевы Комбинаторика. Решение комбинаторных задач
Комбинаторика. Решение комбинаторных задач Логика
Логика Деление степеней
Деление степеней Исчисление предикатов
Исчисление предикатов Описанная и вписанная окружности около треугольника
Описанная и вписанная окружности около треугольника Перетворення графіків функцій
Перетворення графіків функцій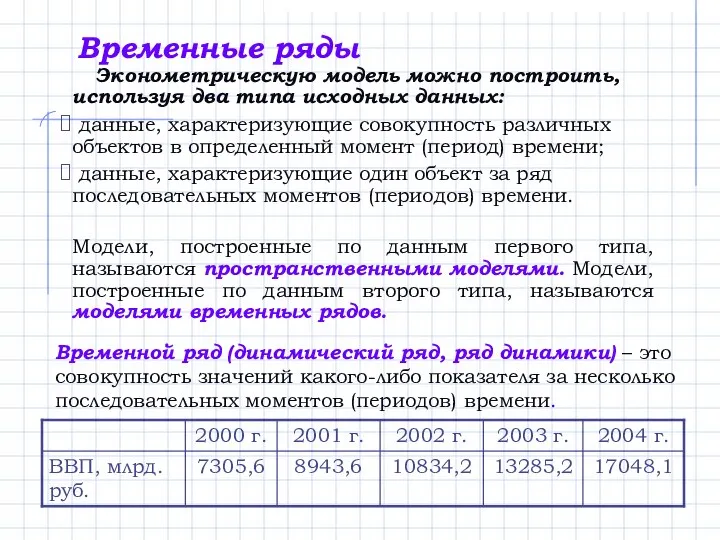 Временные ряды
Временные ряды Решение задач по теме «Перпендикулярные прямые в пространстве»
Решение задач по теме «Перпендикулярные прямые в пространстве»