- Основные понятия теории графов

Содержание
- 2. Основоположником теории графов считается Леонард Эйлер, который доказал невозможность маршрута прохождения всех четырех частей суши в
- 3. Граф G=(V,E) состоит из двух множеств: конечного множества элементов, называемых вершинами, и конечного множества элементов, называемых
- 4. Вершины vi и vj, определяющие ребро ek, называются концевыми вершинами ребра ek. Ребра с одинаковыми концевыми
- 5. Изолированная вершина не инцидентна ни одному ребру (v3). Две вершины смежны, если они являются концевыми вершинами
- 6. Подграф – любая часть графа, сама являющаяся графом. Основные понятия Подграф H графа G
- 7. Граф G=(V,E) называется простым, если он не содержит петель и параллельных ребер. Виды графов Граф G=(V,E)
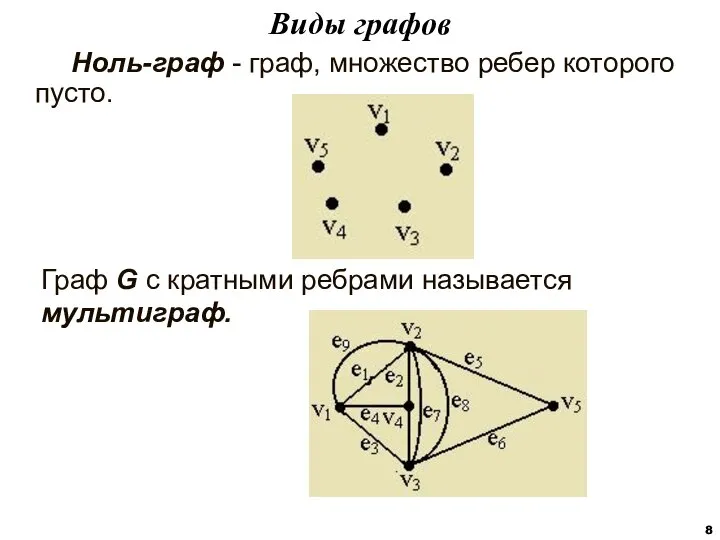
- 8. Виды графов Ноль-граф - граф, множество ребер которого пусто. Граф G с кратными ребрами называется мультиграф.
- 9. Граф G с петлями и кратными ребрами называется псевдограф. Виды графов
- 10. Особый интерес представляют связные акциклические графы, называемые деревьями. Дерево на множестве P вершин всегда содержит q=p-1
- 11. На практике широко используются такие виды графов, как деревья и прадеревья. Деревом называется конечный связный неориентированный
- 12. Лесом называется несвязный граф, каждая компонента связности которого является деревом. Прадеревом называется ориентированный граф G(X) с
- 13. Граф G, рёбра которого не имеют определённого направления, называется неориентированным. Неориентированный граф
- 15. Скачать презентацию
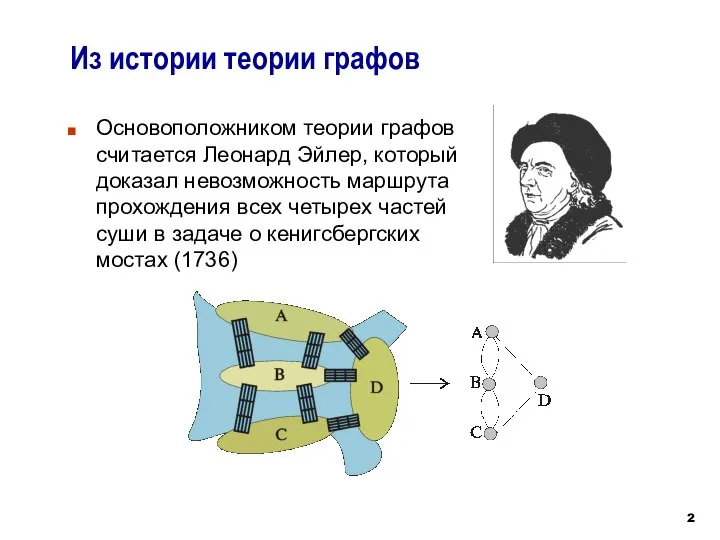
Основоположником теории графов считается Леонард Эйлер, который доказал невозможность маршрута прохождения
Основоположником теории графов считается Леонард Эйлер, который доказал невозможность маршрута прохождения
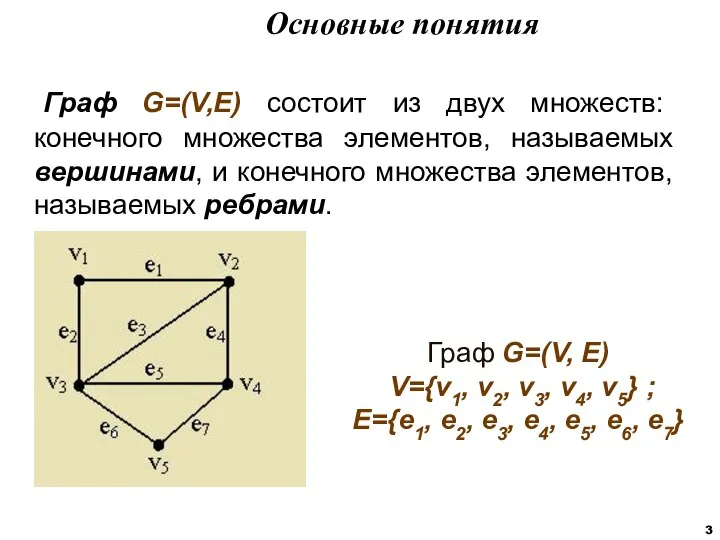
Граф G=(V,E) состоит из двух множеств: конечного множества элементов, называемых вершинами,
Граф G=(V,E) состоит из двух множеств: конечного множества элементов, называемых вершинами,
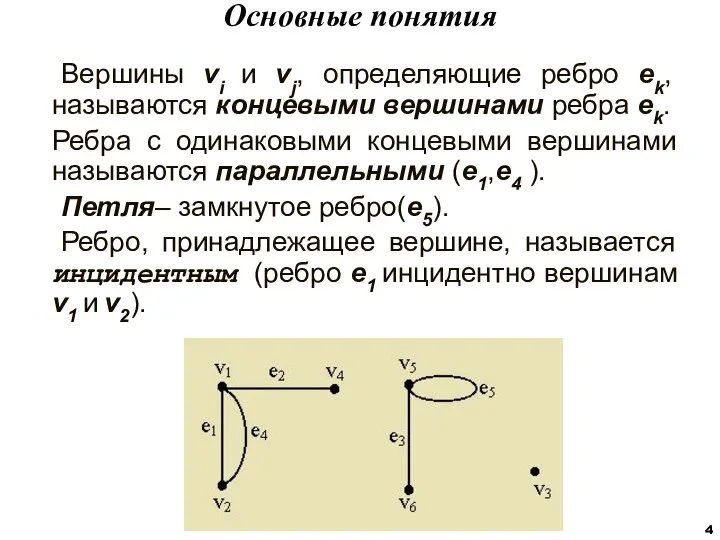
Вершины vi и vj, определяющие ребро ek, называются концевыми вершинами ребра
Вершины vi и vj, определяющие ребро ek, называются концевыми вершинами ребра
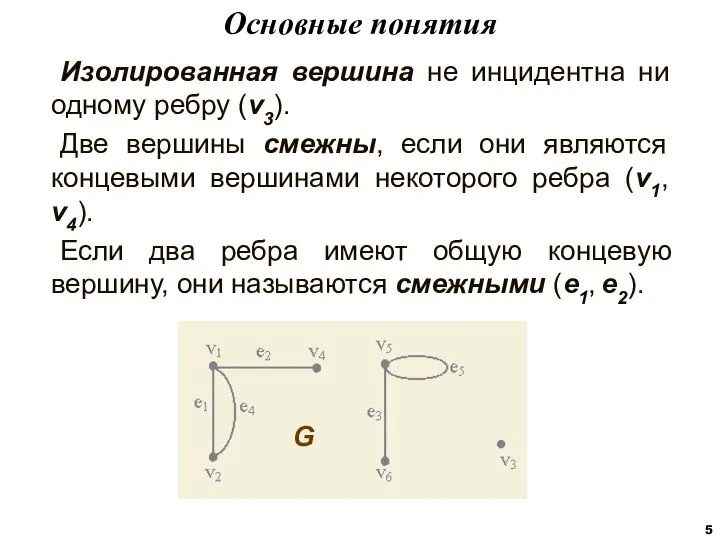
Изолированная вершина не инцидентна ни одному ребру (v3).
Две вершины смежны, если
Изолированная вершина не инцидентна ни одному ребру (v3).
Две вершины смежны, если
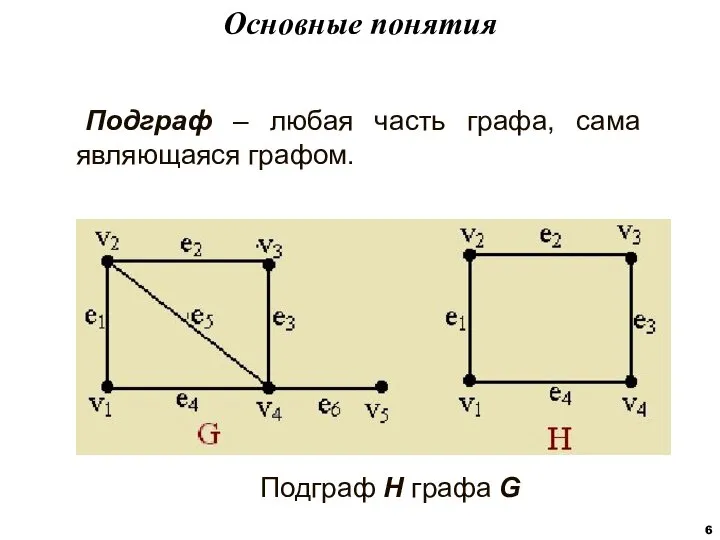
Подграф – любая часть графа, сама являющаяся графом.
Основные понятия
Подграф H графа
Подграф – любая часть графа, сама являющаяся графом.
Основные понятия
Подграф H графа
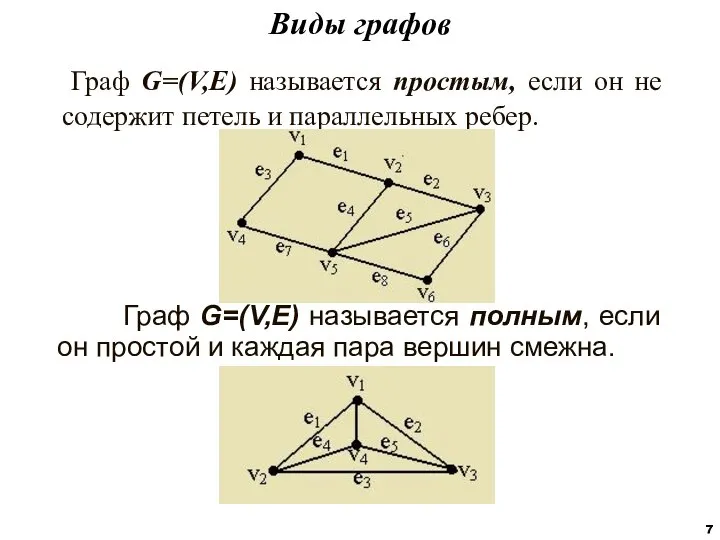
Граф G=(V,E) называется простым, если он не содержит петель и параллельных
Граф G=(V,E) называется простым, если он не содержит петель и параллельных
Виды графов
Ноль-граф - граф, множество ребер которого пусто.
Граф G с кратными
Виды графов
Ноль-граф - граф, множество ребер которого пусто.
Граф G с кратными
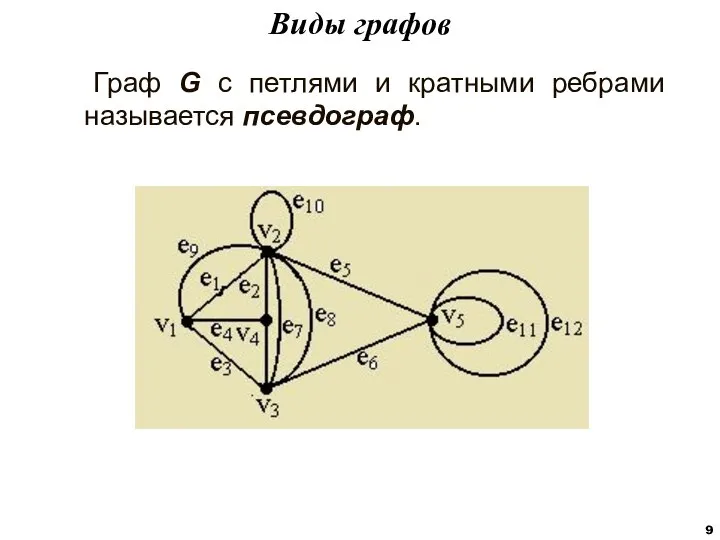
Граф G с петлями и кратными ребрами называется псевдограф.
Виды графов
Граф G с петлями и кратными ребрами называется псевдограф.
Виды графов
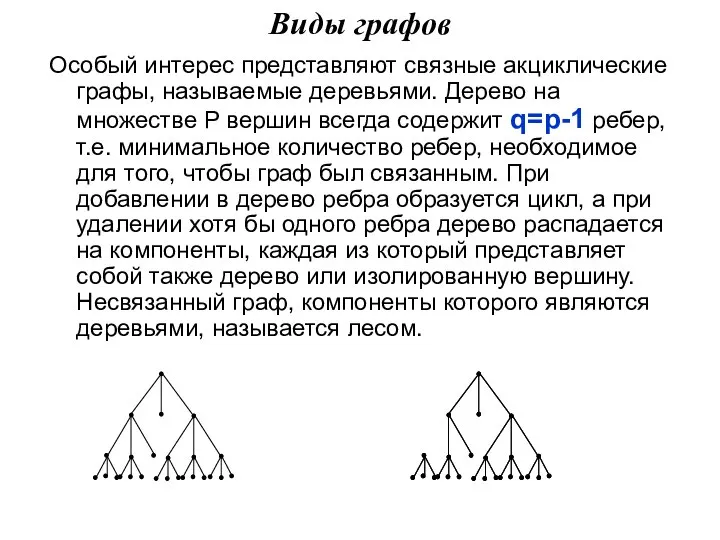
Особый интерес представляют связные акциклические графы, называемые деревьями. Дерево на множестве
Особый интерес представляют связные акциклические графы, называемые деревьями. Дерево на множестве
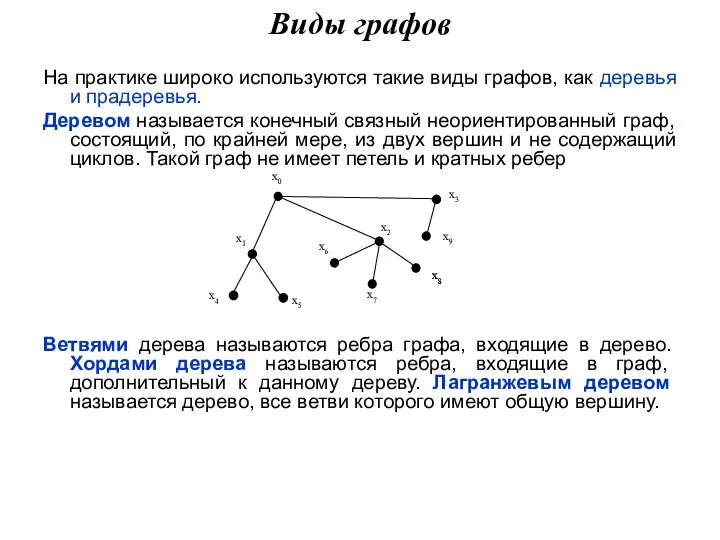
На практике широко используются такие виды графов, как деревья и прадеревья.
Деревом
На практике широко используются такие виды графов, как деревья и прадеревья.
Деревом
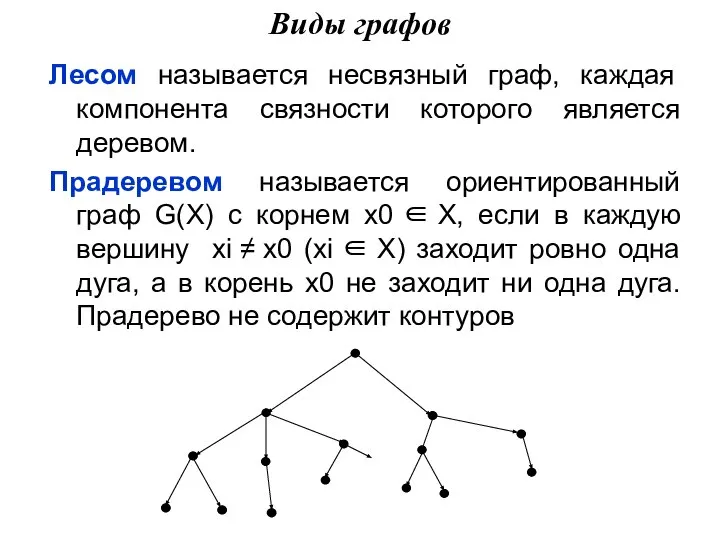
Лесом называется несвязный граф, каждая компонента связности которого является деревом.
Прадеревом называется
Лесом называется несвязный граф, каждая компонента связности которого является деревом.
Прадеревом называется
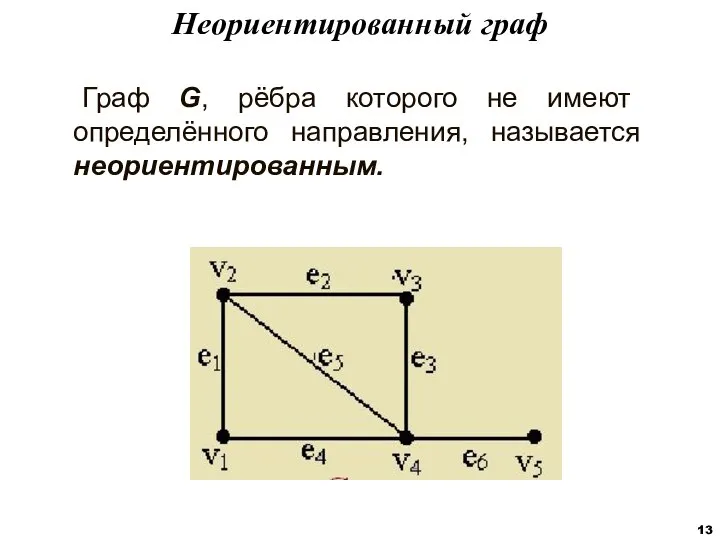
Граф G, рёбра которого не имеют определённого направления, называется неориентированным.
Неориентированный граф
Граф G, рёбра которого не имеют определённого направления, называется неориентированным.
Неориентированный граф
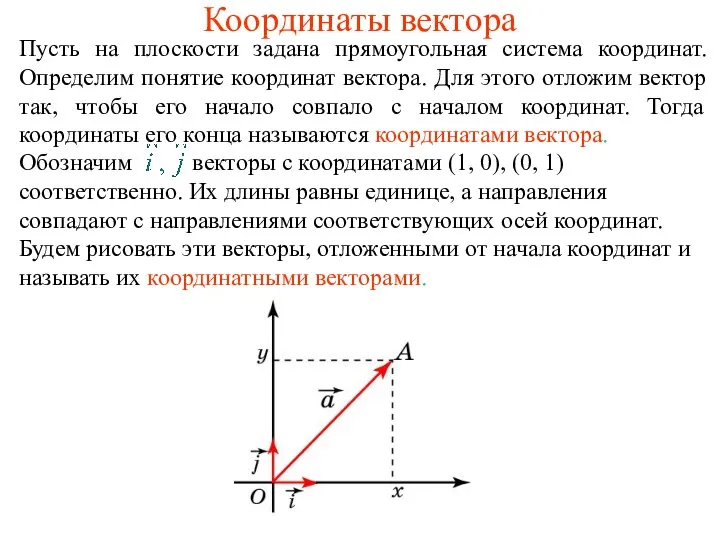 Координаты вектора
Координаты вектора Раскрытие скобок. 6 класс
Раскрытие скобок. 6 класс Интерактивный тренажёр Осенний. Математика 1 класс. Сложение и вычитание в пределах 5
Интерактивный тренажёр Осенний. Математика 1 класс. Сложение и вычитание в пределах 5 Классификаторы
Классификаторы Площадь многоугольника
Площадь многоугольника Проверка деления с остатком
Проверка деления с остатком Подготовила: Груздева Елена Викторовна, учитель математики МОУ СОШ №1 г. Шебекино
Подготовила: Груздева Елена Викторовна, учитель математики МОУ СОШ №1 г. Шебекино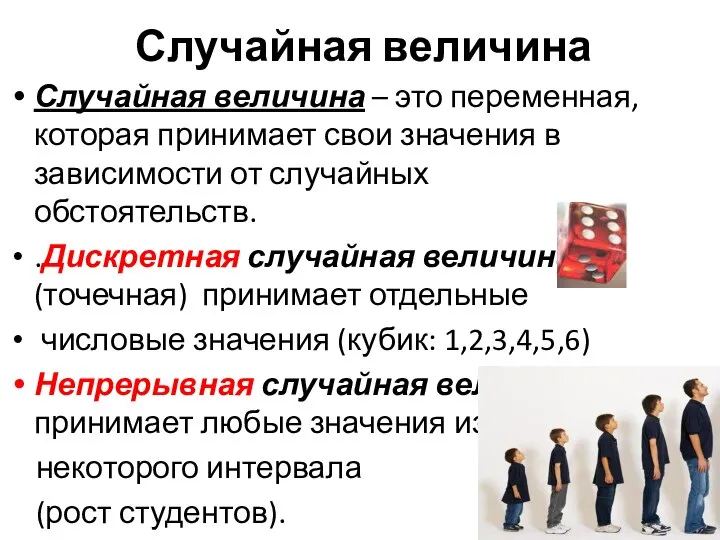 Случайная величина
Случайная величина Квадратные уравнения. Методическая разработка раздела программы по алгебре 8 класса
Квадратные уравнения. Методическая разработка раздела программы по алгебре 8 класса Логические вопросы и вопросы-шутки по теме Единицы измерения времени
Логические вопросы и вопросы-шутки по теме Единицы измерения времени  Нақты санның n-ші дәрежелі түбірі және оның қасиеттері
Нақты санның n-ші дәрежелі түбірі және оның қасиеттері Тест. Взаимно обратные числа (6 класс)
Тест. Взаимно обратные числа (6 класс) Контрольная работа. Вариант №0
Контрольная работа. Вариант №0 Теория чисел
Теория чисел Практика № 12. Задача 3
Практика № 12. Задача 3 Аттестационная работа. Эссе Проектно-исследовательская деятельность на уроках математики в условиях реализации ФГОС
Аттестационная работа. Эссе Проектно-исследовательская деятельность на уроках математики в условиях реализации ФГОС Алгебра высказываний. Понятие высказывания. (Лекция 1)
Алгебра высказываний. Понятие высказывания. (Лекция 1) Методика профессионально ориентированного обучения: математика
Методика профессионально ориентированного обучения: математика Десятичные дроби. Десятичная система счисления
Десятичные дроби. Десятичная система счисления Функцияның туындысы нольге тең немесе туындысы болмайтын анықталу облысының ішкі нүктелері сындық нүктелер деп атайды
Функцияның туындысы нольге тең немесе туындысы болмайтын анықталу облысының ішкі нүктелері сындық нүктелер деп атайды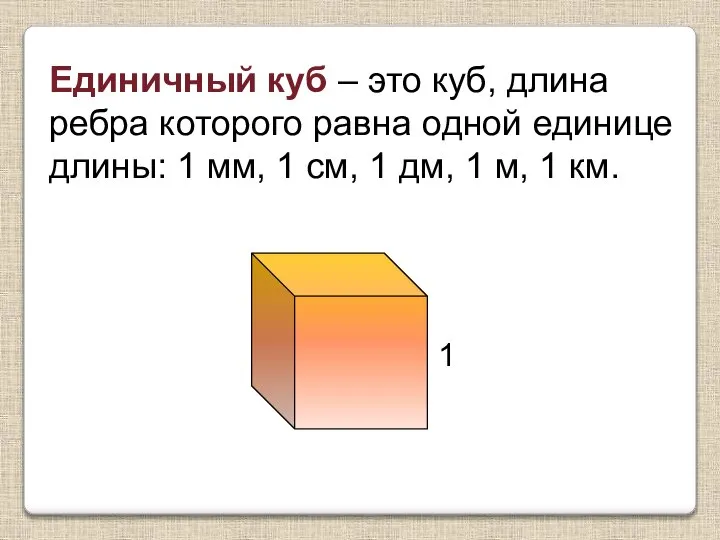 Объём прямоугольного параллелепипеда
Объём прямоугольного параллелепипеда Деление и дроби
Деление и дроби Устойчивость пластин и оболочек
Устойчивость пластин и оболочек Математичні процесори. Програмно-методичний комплекс GRAN та його використання
Математичні процесори. Програмно-методичний комплекс GRAN та його використання Алгебраические и геометрические модели
Алгебраические и геометрические модели Построение графиков квадратичной функции
Построение графиков квадратичной функции Решение неравенств с одной переменной
Решение неравенств с одной переменной Сложение и вычитание смешанных чисел
Сложение и вычитание смешанных чисел