- Системы координат, применяемые в механике полета

Содержание
- 2. Общий принцип построения СК: выбирается основная координатная плоскость системы направление основной оси и расположение начала отсчета
- 3. Основные координатные плоскости: плоскость эклиптики, плоскость экватора, плоскость движения (орбиты) ЛА, плоскость, касательная к поверхности Земли
- 4. Начало СК может быть: расположено в центре Земли или на поверхности Земли (планеты), в центре масс
- 5. Геоцентрическая экваториальная инерциальная СК (СК ОИXИYИZИ) Рис.2.1
- 6. Земная геоцентрическая СК (OXГЦYГЦZГЦ) и земная географическая СК (OoXgYgZg) Рис.2.2
- 7. Земная стартовая СК Рис.2.3
- 8. Земная нормальная СК , земная подвижная система координат и нормальная система координат Рис.2.4
- 9. Связанная система координат (OXYZ) 1 - Вертикальная плоскость симметрии ЛА (OXY), 2- Горизонтальная плоскость симметрии ЛА
- 10. Скоростная СК (OXaYaZa) Рис.2.6
- 11. 2.2. Углы, используемые для определения углового различных систем во-первых, взаимным положением начал разных СК, т.е. расстоянием
- 12. Углы между осями связанной и нормальной СК (углы , и ) Исходное положение земной и связанной
- 13. Схема поворотов при построении углов Эйлера
- 14. Угол рыскания (курса) - это угол между осью и проекцией продольной оси на местную горизонтальную плоскость
- 15. Углы между осями скоростной и нормальной СК (углы , и ) скоростным углом рыскания , скоростным
- 16. Углы между осями траекторной и нормальной СК (углы и )
- 17. Углы между осями траекторной и скоростной СК при Траекторный угол совпадает со скоростным углом рыскания, т.е.
- 18. Углы между осями связанной и скоростной СК (углы и ) Угол атаки Угол скольжения
- 19. (2.2) (2.3) (2.4)
- 20. (2.5) (2.6)
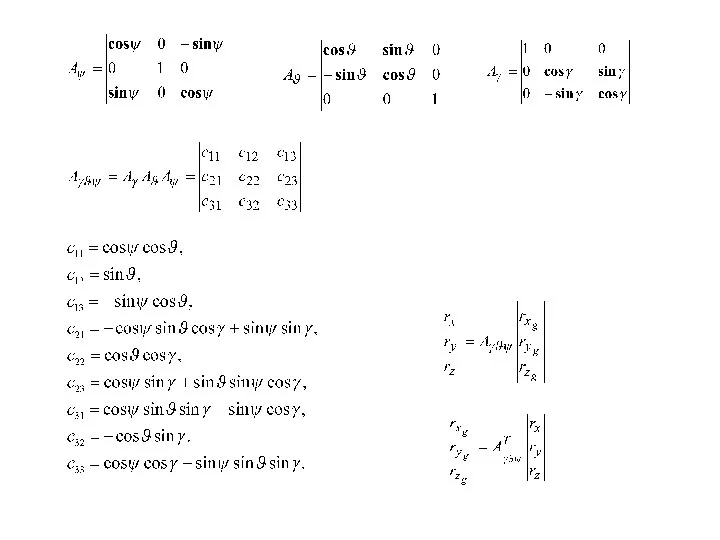
- 21. 2.3. Матрицы перехода (таблицы направляющих косинусов) (2.7) (2.8)
- 22. или
- 23. Задача по вычислению направляющих синусов рассмотрим на примере следующей пары СК: нормальной и связанной
- 26. Скачать презентацию
Общий принцип построения СК:
выбирается основная координатная плоскость системы
направление основной
Общий принцип построения СК:
выбирается основная координатная плоскость системы
направление основной
Основные координатные плоскости:
плоскость эклиптики,
плоскость экватора,
плоскость движения (орбиты) ЛА,
плоскость,
Основные координатные плоскости:
плоскость эклиптики,
плоскость экватора,
плоскость движения (орбиты) ЛА,
плоскость,
Начало СК может быть:
расположено в центре Земли
или на поверхности
Начало СК может быть:
расположено в центре Земли
или на поверхности
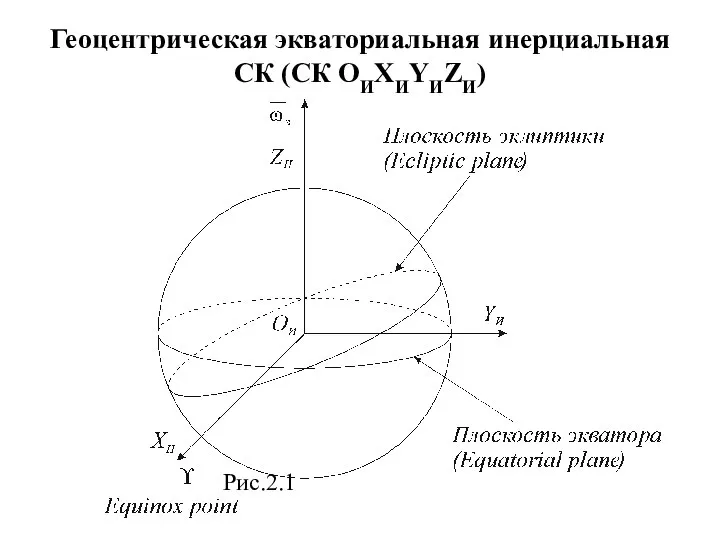
Геоцентрическая экваториальная инерциальная СК (СК ОИXИYИZИ)
Рис.2.1
Геоцентрическая экваториальная инерциальная СК (СК ОИXИYИZИ)
Рис.2.1
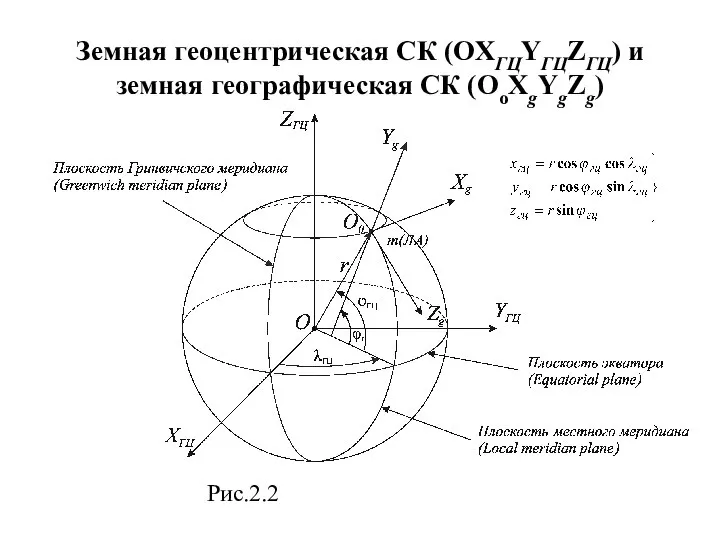
Земная геоцентрическая СК (OXГЦYГЦZГЦ) и земная географическая СК (OoXgYgZg)
Рис.2.2
Земная геоцентрическая СК (OXГЦYГЦZГЦ) и земная географическая СК (OoXgYgZg)
Рис.2.2
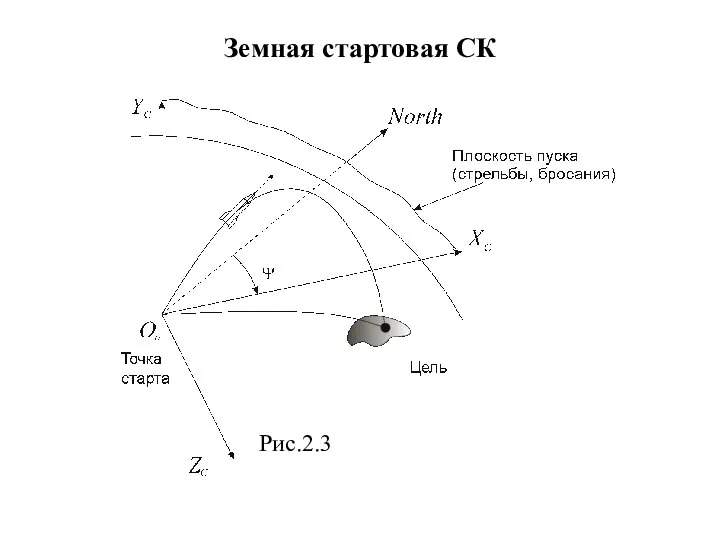
Земная стартовая СК
Рис.2.3
Земная стартовая СК
Рис.2.3
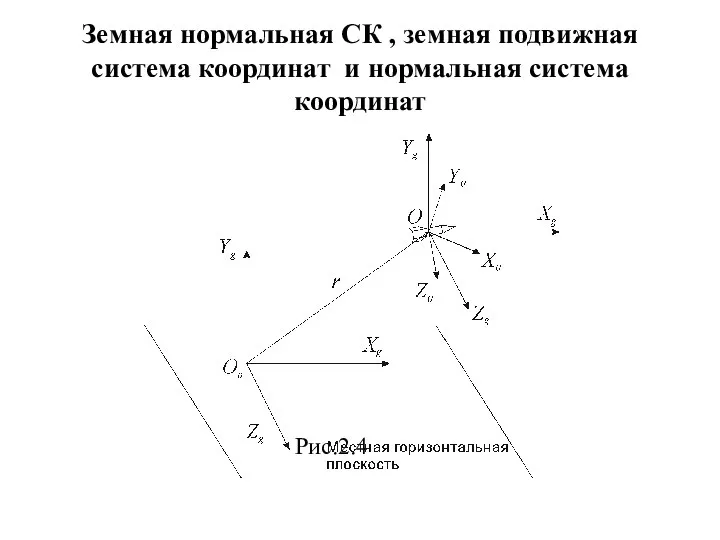
Земная нормальная СК , земная подвижная система координат и нормальная система
Земная нормальная СК , земная подвижная система координат и нормальная система
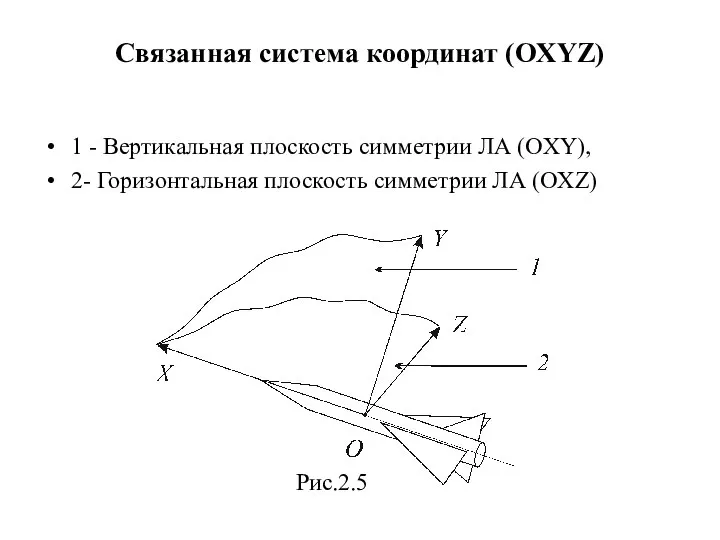
Связанная система координат (OXYZ)
1 - Вертикальная плоскость симметрии ЛА (OXY),
2- Горизонтальная
Связанная система координат (OXYZ)
1 - Вертикальная плоскость симметрии ЛА (OXY),
2- Горизонтальная
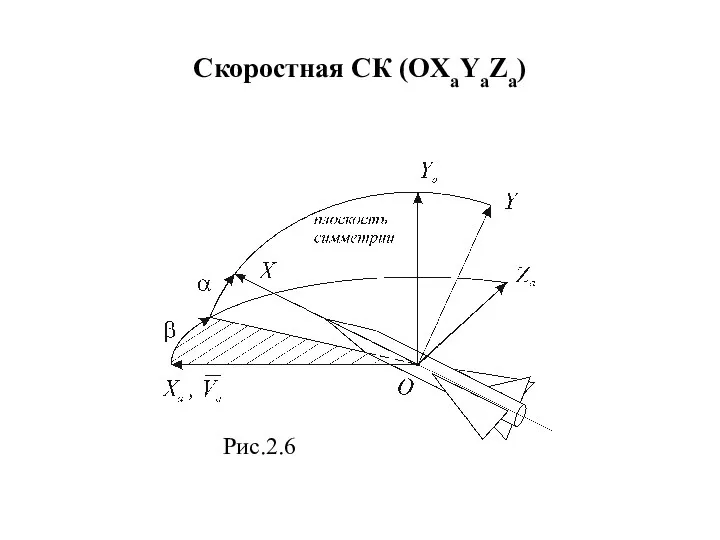
Скоростная СК (OXaYaZa)
Рис.2.6
Скоростная СК (OXaYaZa)
Рис.2.6
2.2. Углы, используемые для определения углового различных систем
во-первых, взаимным положением начал
2.2. Углы, используемые для определения углового различных систем
во-первых, взаимным положением начал
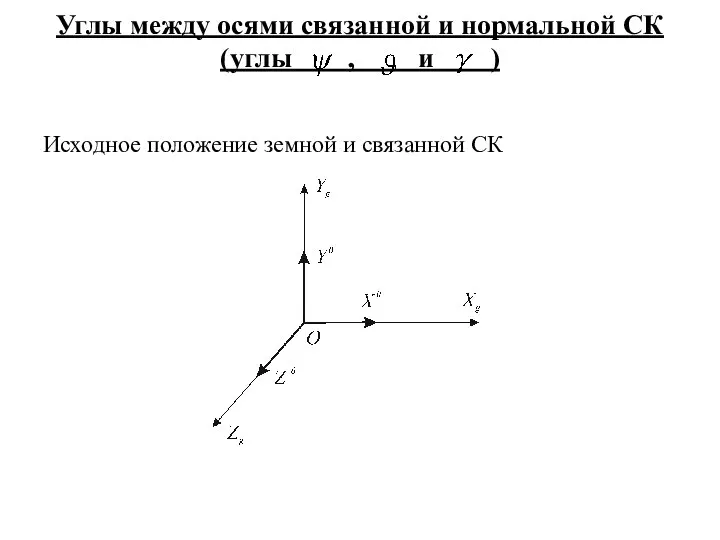
Углы между осями связанной и нормальной СК (углы , и )
Исходное
Углы между осями связанной и нормальной СК (углы , и )
Исходное
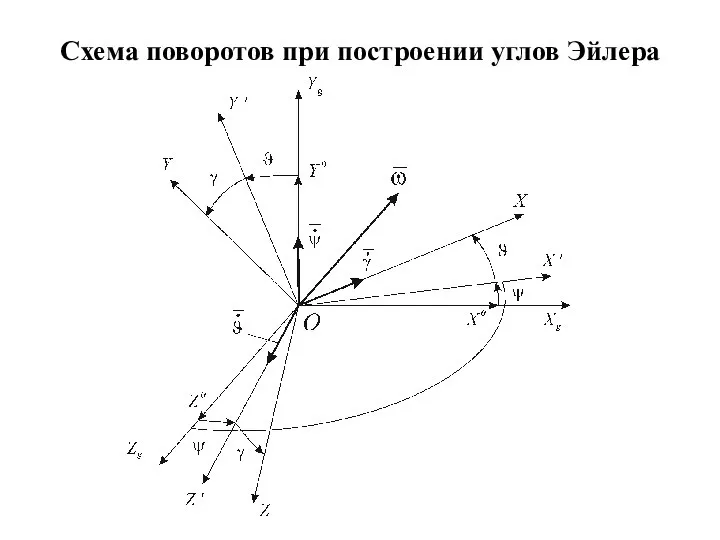
Схема поворотов при построении углов Эйлера
Схема поворотов при построении углов Эйлера
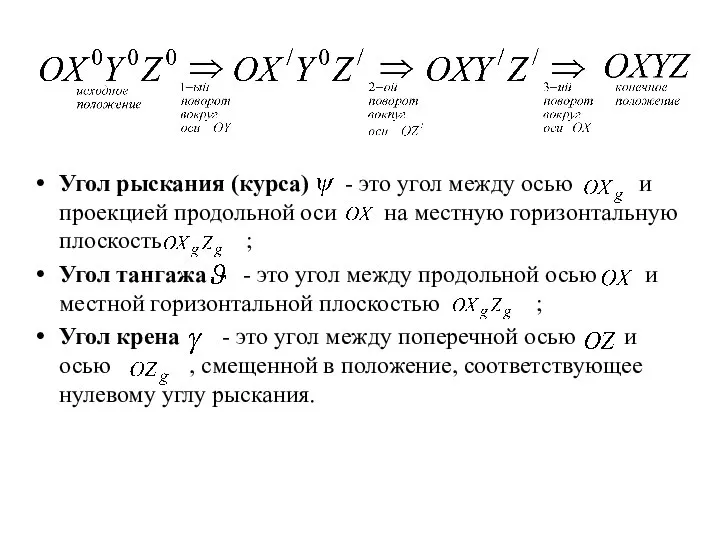
Угол рыскания (курса) - это угол между осью и проекцией продольной
Угол рыскания (курса) - это угол между осью и проекцией продольной
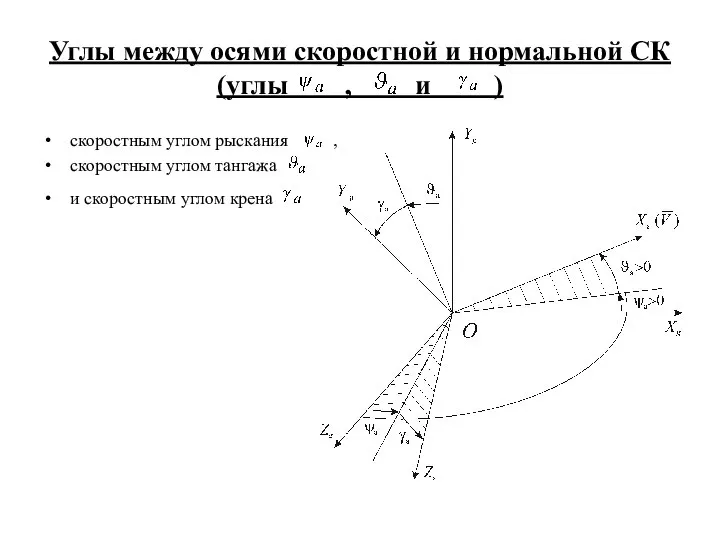
Углы между осями скоростной и нормальной СК (углы , и )
скоростным
Углы между осями скоростной и нормальной СК (углы , и )
скоростным
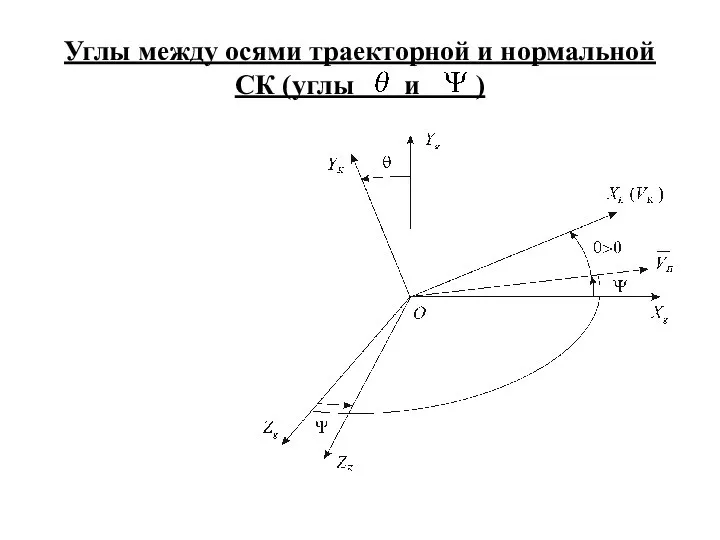
Углы между осями траекторной и нормальной СК (углы и )
Углы между осями траекторной и нормальной СК (углы и )
Углы между осями траекторной и скоростной СК при
Траекторный угол совпадает со
Углы между осями траекторной и скоростной СК при
Траекторный угол совпадает со
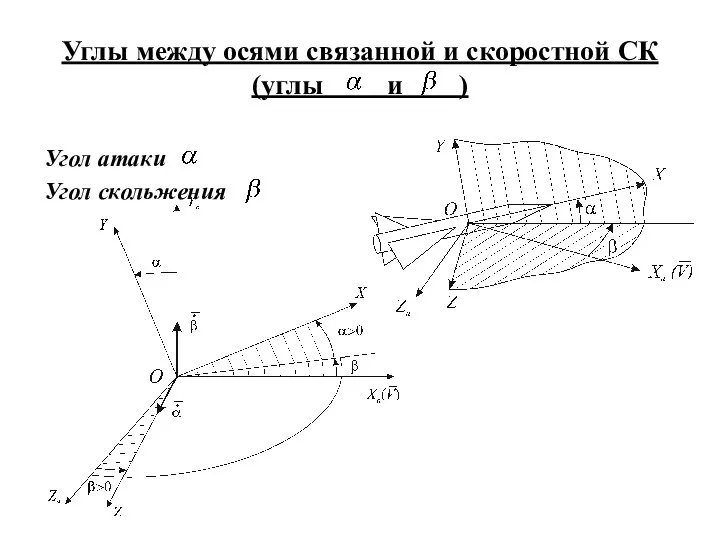
Углы между осями связанной и скоростной СК (углы и )
Угол атаки
Угол
Углы между осями связанной и скоростной СК (углы и )
Угол атаки
Угол
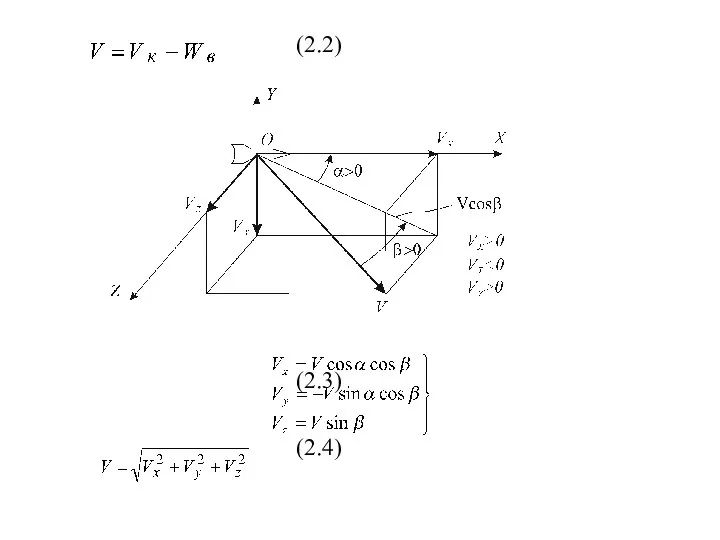
(2.2)
(2.3)
(2.4)
(2.2)
(2.3)
(2.4)
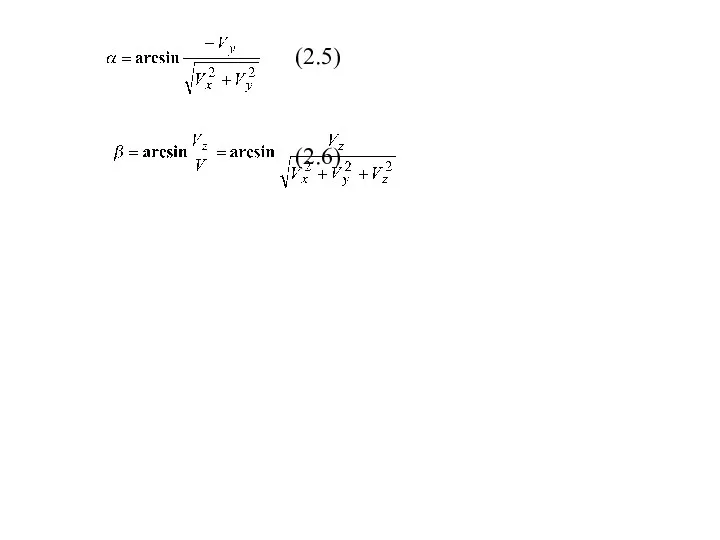
(2.5)
(2.6)
(2.5)
(2.6)
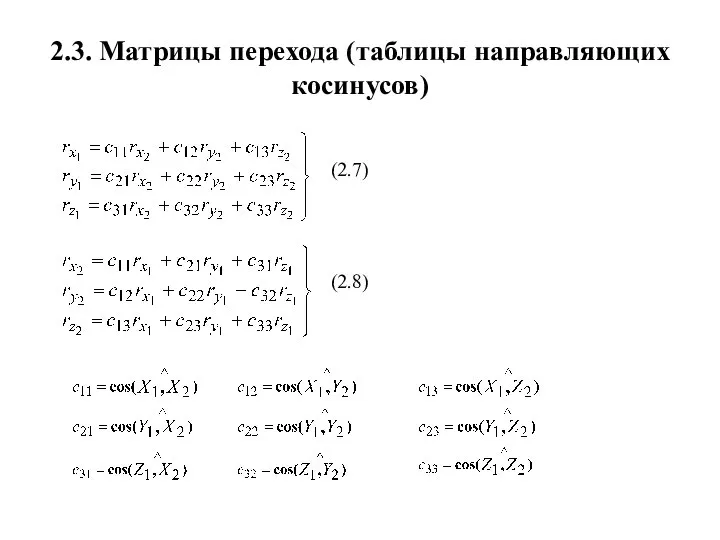
2.3. Матрицы перехода (таблицы направляющих косинусов)
(2.7)
(2.8)
2.3. Матрицы перехода (таблицы направляющих косинусов)
(2.7)
(2.8)
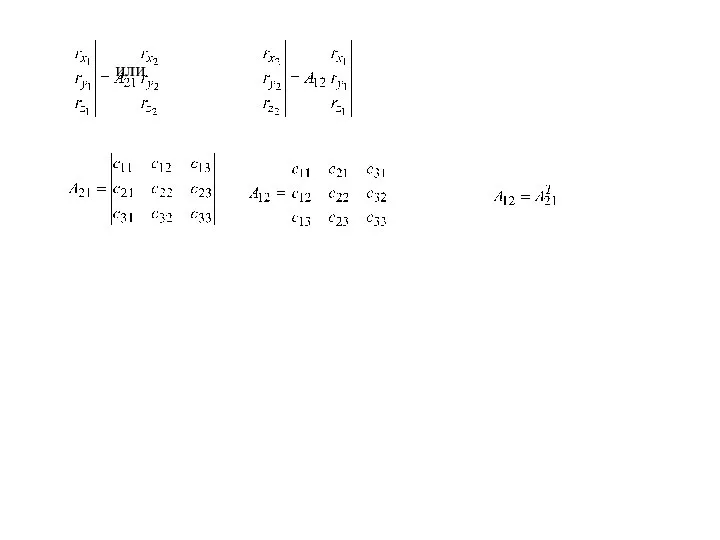
или
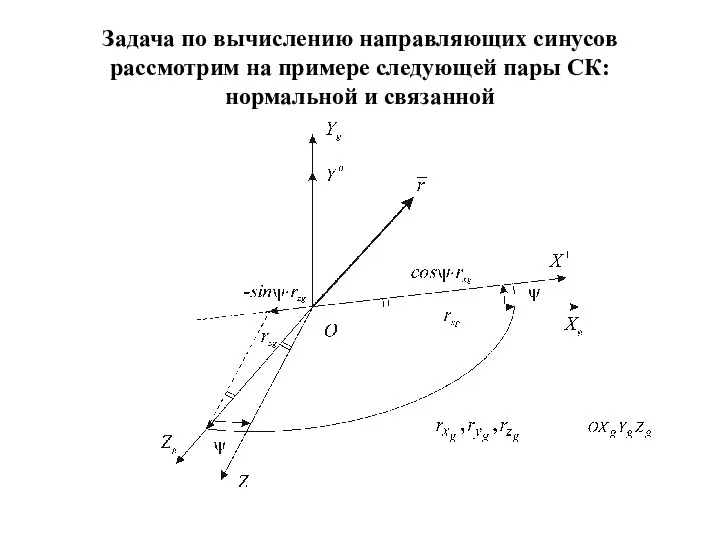
Задача по вычислению направляющих синусов рассмотрим на примере следующей пары СК:
Задача по вычислению направляющих синусов рассмотрим на примере следующей пары СК:
 Решение квадратных уравнений
Решение квадратных уравнений Свойства функции
Свойства функции Решение квадратных неравенств. 8 класс
Решение квадратных неравенств. 8 класс Пересечение цилиндров
Пересечение цилиндров Преобразование выражений. 7 класс
Преобразование выражений. 7 класс задачи на нахождение процента от числа Выполнила Ученица 6 «В» средней школы №28 пос. Богородское Куницкая Екатерина Руководите
задачи на нахождение процента от числа Выполнила Ученица 6 «В» средней школы №28 пос. Богородское Куницкая Екатерина Руководите Бесконечные непериодические десятичные дроби (урок 10)
Бесконечные непериодические десятичные дроби (урок 10) Подготовка к контрольной работе по теме: Сумма углов треугольника
Подготовка к контрольной работе по теме: Сумма углов треугольника Квадратные уравнения
Квадратные уравнения Задача дискретного логарифмирования и криптосистемы на ее основе
Задача дискретного логарифмирования и криптосистемы на ее основе Измерение углов
Измерение углов История математики
История математики Число Пи
Число Пи Признаки равенства прямоугольных треугольников
Признаки равенства прямоугольных треугольников Обыкновенные дроби. Урок-соревнование «Крестики-нолики»
Обыкновенные дроби. Урок-соревнование «Крестики-нолики» Математическая обработка экспериментальных данных
Математическая обработка экспериментальных данных Первоначальные понятия геометрии
Первоначальные понятия геометрии Применение производной и первообразной. Подготовка к ЕГЭ
Применение производной и первообразной. Подготовка к ЕГЭ Презентация по математике "Дифференциальное исчисление функции одной переменной" - скачать бесплатно
Презентация по математике "Дифференциальное исчисление функции одной переменной" - скачать бесплатно Презентация РАСТРОВАЯ И ВЕКТОРНАЯ АНИМАЦИЯ
Презентация РАСТРОВАЯ И ВЕКТОРНАЯ АНИМАЦИЯ  Матрицы и действия с ними
Матрицы и действия с ними Элементы математической статистики, комбинаторики и теории вероятностей. Формула бинома Ньютона
Элементы математической статистики, комбинаторики и теории вероятностей. Формула бинома Ньютона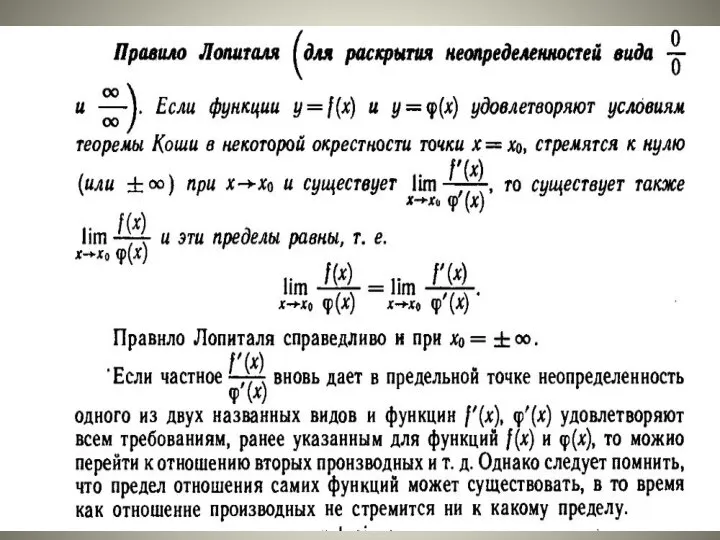 Правило Лопиталя
Правило Лопиталя Таблица умножения и деления числа 6. Закрепление. Урок-сказка 3 класс
Таблица умножения и деления числа 6. Закрепление. Урок-сказка 3 класс  Организация вычислений с использованием относительных, абсолютных и смешанных ссылок
Организация вычислений с использованием относительных, абсолютных и смешанных ссылок Нормальные формы формул алгебры высказываний
Нормальные формы формул алгебры высказываний Задачи по математике
Задачи по математике Решение текстовых задач
Решение текстовых задач