- Стохастическая модель

Содержание
- 2. Случайная функция (1) Случайная функция X(t) – это функция, сечение которой (т.е. если зафиксировать t), представляет
- 3. Случайная функция (2) Случайная функция может зависеть от нескольких переменных. Например, броуновское движение молекулы можно описать
- 4. Случайная функция (3) Многомерный случайный процесс – когда существует множество описываемых случайным процессом параметров. Например, полет
- 5. Классификация случайных процессов (1) Процесс с непрерывными состояниями – процесс, сечение которой в любой момент t
- 6. Классификация случайных процессов (2) Процесс с непрерывным временем – процесс, при котором объект может изменять состояние
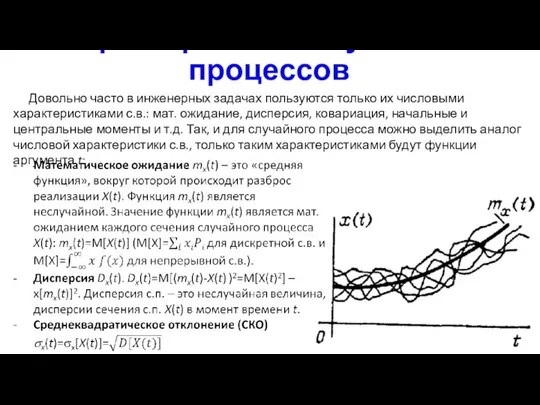
- 7. Характеристики случайных процессов Довольно часто в инженерных задачах пользуются только их числовыми характеристиками с.в.: мат. ожидание,
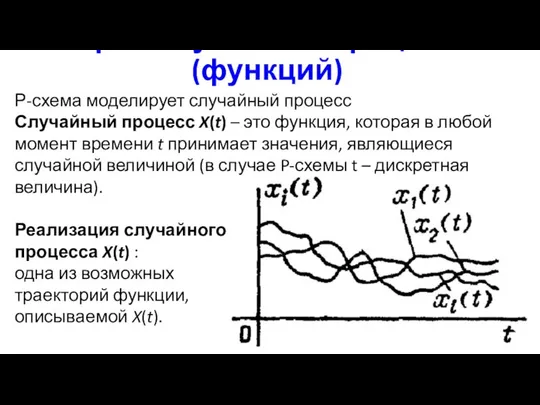
- 8. Теория случайных процессов (функций) Р-схема моделирует случайный процесс Случайный процесс X(t) – это функция, которая в
- 9. Примеры случайных процессов Случайны автомат (на дугах этого автомата стоят вероятности перехода из одного состояния в
- 10. Стохастическая модель Цель исследования стохастической модели – нахождение характеристик объекта моделирования в стационарном состоянии (стационарные вероятности),
- 11. P-схема моделирования t t0 t1 t2 t3 t4 t5 t6 t7
- 12. А.А. Марков (старший) – основоположник теории сетей Маркова А.А. Марков (1856 - 1922) Оставил труды в
- 13. Модель представляет собой граф, где узлы обозначают состояние моделируемого объекта, а дуги – вероятность перехода из
- 14. Марковские процессы Марковские процессы делятся на два вида: Дискретные (цепи Маркова), где система меняет свое состояние
- 15. Свойство марковости
- 16. Условная вероятность Условной называется вероятность, что произойдет какое-либо событие, если известно, что произошло до этого произошло
- 17. Примеры дискретных марковских процессов 1. Ветвящийся процесс Гальтона – Ватсона Наблюдается популяция живых организмов в дискретные
- 18. Дискретная сеть Маркова (P-схема) Матрица переходных вероятностей (P) π(i) =(1,0,0,0) – вектор вероятностей состояний (показывает вероятность
- 19. Матрица вероятностей перехода Сумма всех элементов в строке матрицы вероятностей равняется единице!!! =1 =1 =1 =1
- 20. Имитационное моделирование дискретной сети Маркова π(n)=π(n-1)*P (*), где n – номер шага моделирования. Моделирование представляет собой
- 21. Однородная и неоднородная цепи Маркова Однородная цепь – где на каждом шаге применяется одна и та
- 22. Разложимая и эргодическая цепи Маркова Разложимая цепь – содержит невозвратные (поглощающие) состояния (множества состояний). Из таких
- 23. Периодическая цепь Маркова Периодической цепью называется такая цепь, последовательность смены состояний которой меняются периодически. В случае
- 24. Эргодическая марковская система Эргодической называется неразложимая и нециклическая марковская система. Для такой системы имеется возможность определить
- 25. Теорема о существовании предельных вероятностей марковской цепи
- 26. Пример моделирования цепи Маркова (1) π =(1,0,0,0) – начальное состояние; 1 шаг: P’=(0.8, 0.2, 0, 0);
- 27. Пример моделирования цепи Маркова (2) Шаг моделирования Вероятности состояний
- 28. Пример моделирования цепи Маркова (2) π=(0.25, 0.25, 0.25, 0.25); 1 шаг: P’=(0.275, 0.275, 0.125, 0.325); ε=
- 29. Пример моделирования цепи Маркова (4) Шаг моделирования Вероятности состояний
- 30. Аналитическое моделирование цепи Маркова
- 31. Пример аналитического моделирования цепи Маркова (1) P= PT= 1) 2) 3) 4) (PT - E)= =
- 32. Пример аналитического моделирования цепи Маркова (2) 5) Решим линейную систему уравнений (PT - E)=(0,0,…,0,1)T = 6)
- 33. Пример аналитического моделирования цепи Маркова (2) 5) Решим линейную систему уравнений (PT - E)=(0,0,…,0,1)T = 6)
- 34. Моделирование приводимой цепи Маркова Матрица переходных вероятностей (P) π(0)=(0.25,0.25,0.25,0.25)
- 35. Пример моделирования приводимой цепи Маркова π =(0.25,0.25,0.25,0.25) – начальное состояние; 1 шаг: P’=(0.575 0.25 0.05 0.125);
- 36. Методика моделирования по схеме дискретных марковских процессов Сформулируем методику моделирования по схеме дискретных марковских процессов (марковских
- 38. Скачать презентацию
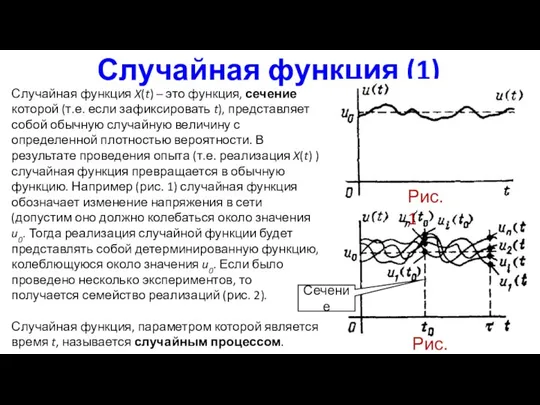
Случайная функция (1)
Случайная функция X(t) – это функция, сечение которой (т.е.
Случайная функция (1)
Случайная функция X(t) – это функция, сечение которой (т.е.
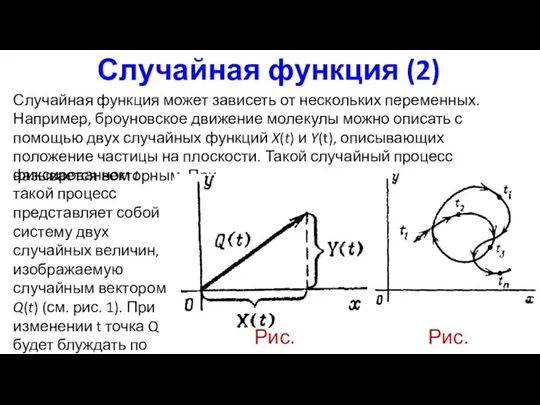
Случайная функция (2)
Случайная функция может зависеть от нескольких переменных. Например, броуновское
Случайная функция (2)
Случайная функция может зависеть от нескольких переменных. Например, броуновское
Случайная функция (3)
Многомерный случайный процесс – когда существует множество описываемых случайным
Случайная функция (3)
Многомерный случайный процесс – когда существует множество описываемых случайным
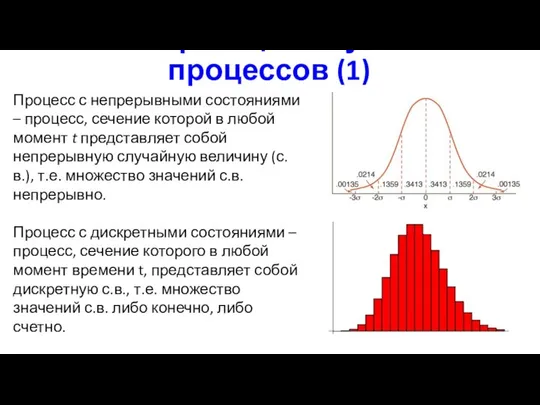
Классификация случайных процессов (1)
Процесс с непрерывными состояниями – процесс, сечение которой
Классификация случайных процессов (1)
Процесс с непрерывными состояниями – процесс, сечение которой
Классификация случайных процессов (2)
Процесс с непрерывным временем – процесс, при котором
Классификация случайных процессов (2)
Процесс с непрерывным временем – процесс, при котором
Характеристики случайных процессов
Довольно часто в инженерных задачах пользуются только их числовыми
Характеристики случайных процессов
Довольно часто в инженерных задачах пользуются только их числовыми
Теория случайных процессов (функций)
Р-схема моделирует случайный процесс
Случайный процесс X(t) –
Теория случайных процессов (функций)
Р-схема моделирует случайный процесс
Случайный процесс X(t) –
Примеры случайных процессов
Случайны автомат (на дугах этого автомата стоят вероятности перехода
Примеры случайных процессов
Случайны автомат (на дугах этого автомата стоят вероятности перехода
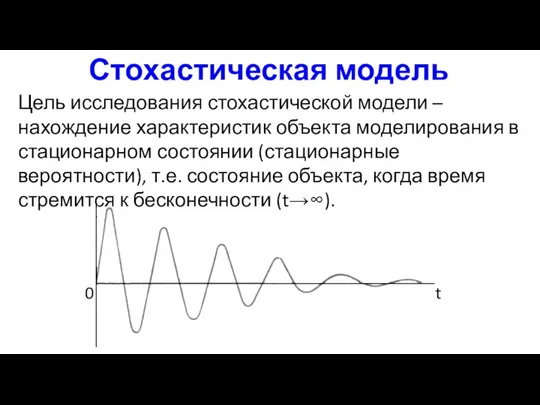
Стохастическая модель
Цель исследования стохастической модели – нахождение характеристик объекта моделирования в
Стохастическая модель
Цель исследования стохастической модели – нахождение характеристик объекта моделирования в
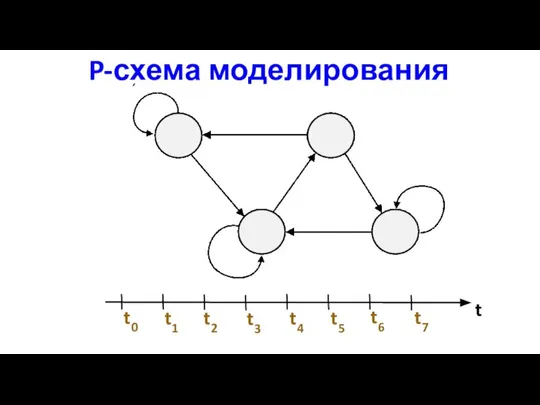
P-схема моделирования
t
t0
t1
t2
t3
t4
t5
t6
t7
P-схема моделирования
t
t0
t1
t2
t3
t4
t5
t6
t7
А.А. Марков (старший) – основоположник теории сетей Маркова
А.А. Марков (1856 -
А.А. Марков (старший) – основоположник теории сетей Маркова
А.А. Марков (1856 -
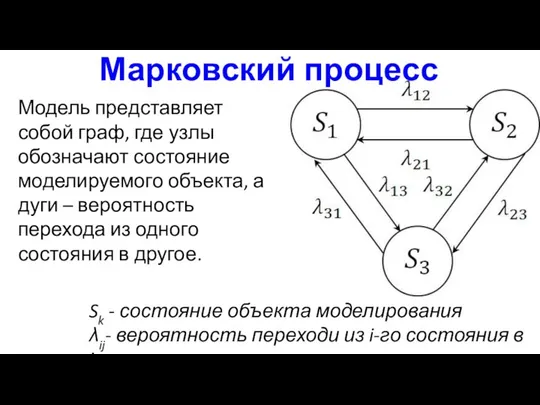
Модель представляет собой граф, где узлы обозначают состояние моделируемого объекта, а
Модель представляет собой граф, где узлы обозначают состояние моделируемого объекта, а
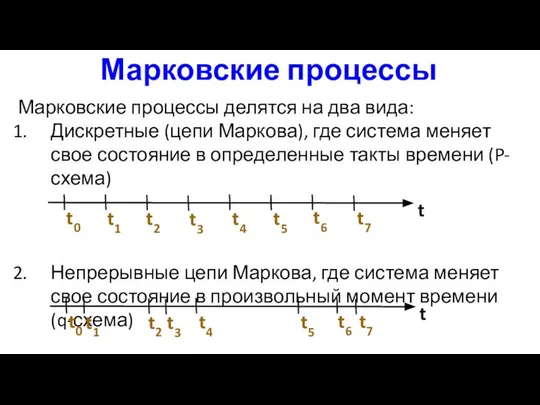
Марковские процессы
Марковские процессы делятся на два вида:
Дискретные (цепи Маркова), где система
Марковские процессы
Марковские процессы делятся на два вида:
Дискретные (цепи Маркова), где система
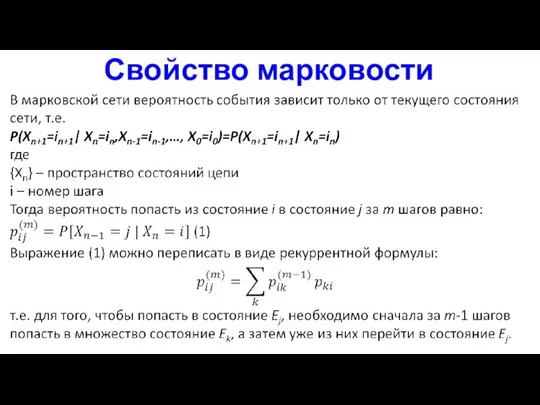
Свойство марковости
Свойство марковости
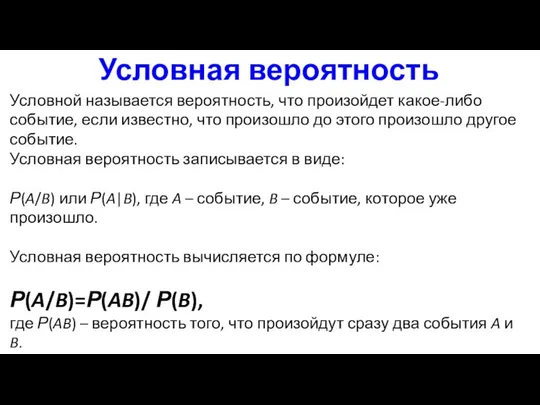
Условная вероятность
Условной называется вероятность, что произойдет какое-либо событие, если известно, что
Условная вероятность
Условной называется вероятность, что произойдет какое-либо событие, если известно, что
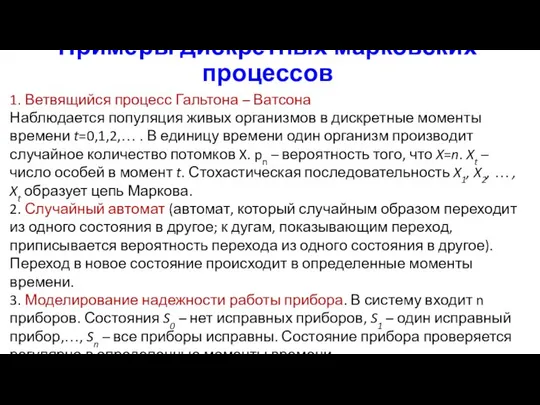
Примеры дискретных марковских процессов
1. Ветвящийся процесс Гальтона – Ватсона
Наблюдается популяция живых
Примеры дискретных марковских процессов
1. Ветвящийся процесс Гальтона – Ватсона
Наблюдается популяция живых
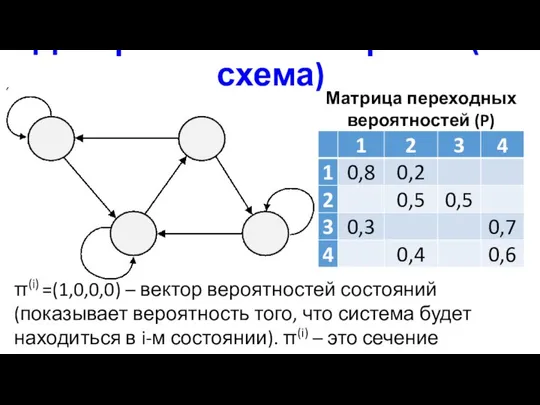
Дискретная сеть Маркова (P-схема)
Матрица переходных вероятностей (P)
π(i) =(1,0,0,0) – вектор вероятностей
Дискретная сеть Маркова (P-схема)
Матрица переходных вероятностей (P)
π(i) =(1,0,0,0) – вектор вероятностей
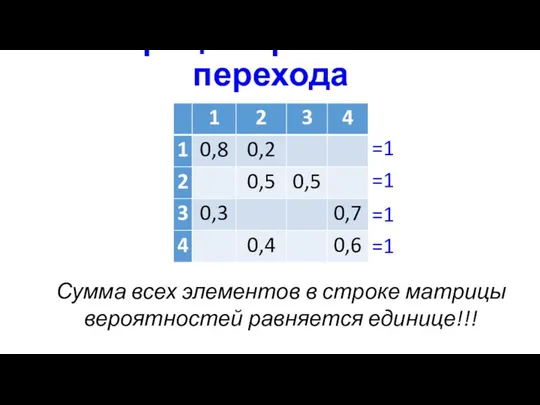
Матрица вероятностей перехода
Сумма всех элементов в строке матрицы вероятностей равняется единице!!!
=1
=1
=1
=1
Матрица вероятностей перехода
Сумма всех элементов в строке матрицы вероятностей равняется единице!!!
=1
=1
=1
=1
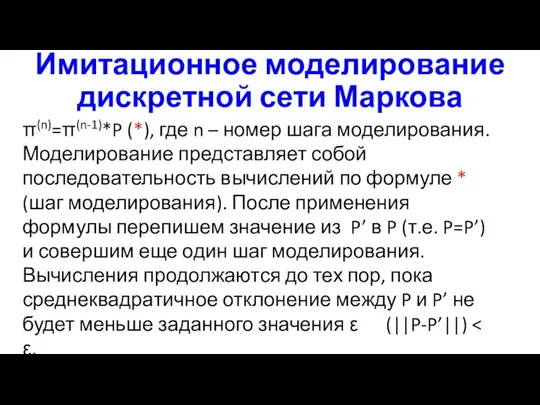
Имитационное моделирование дискретной сети Маркова
π(n)=π(n-1)*P (*), где n – номер шага
Имитационное моделирование дискретной сети Маркова
π(n)=π(n-1)*P (*), где n – номер шага
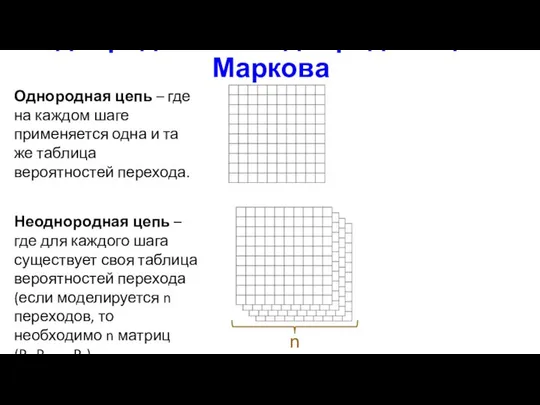
Однородная и неоднородная цепи Маркова
Однородная цепь – где на каждом шаге
Однородная и неоднородная цепи Маркова
Однородная цепь – где на каждом шаге
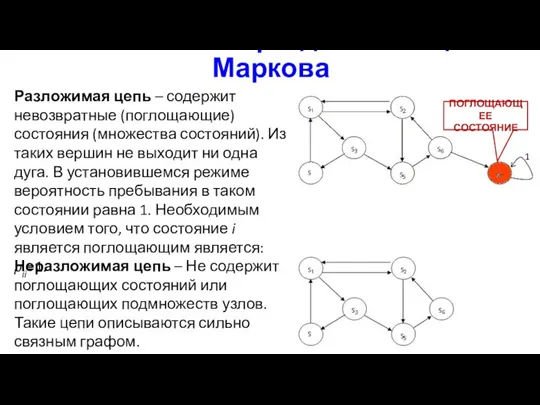
Разложимая и эргодическая цепи Маркова
Разложимая цепь – содержит невозвратные (поглощающие) состояния
Разложимая и эргодическая цепи Маркова
Разложимая цепь – содержит невозвратные (поглощающие) состояния
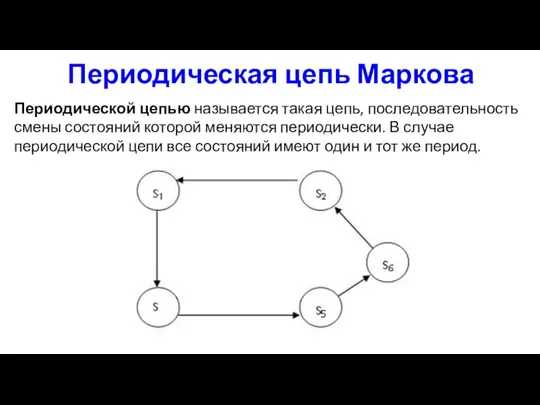
Периодическая цепь Маркова
Периодической цепью называется такая цепь, последовательность смены состояний которой
Периодическая цепь Маркова
Периодической цепью называется такая цепь, последовательность смены состояний которой
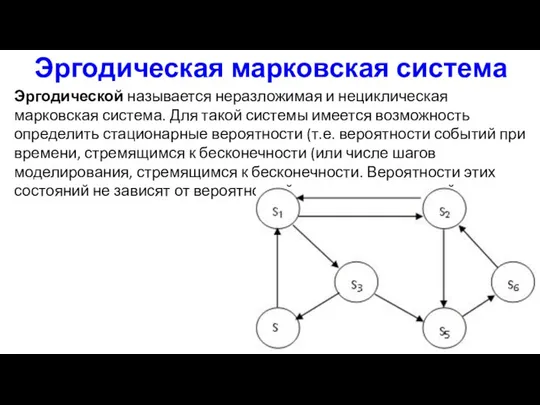
Эргодическая марковская система
Эргодической называется неразложимая и нециклическая марковская система. Для такой
Эргодическая марковская система
Эргодической называется неразложимая и нециклическая марковская система. Для такой
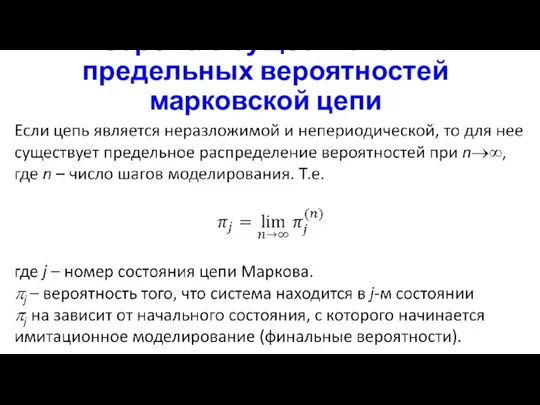
Теорема о существовании предельных вероятностей марковской цепи
Теорема о существовании предельных вероятностей марковской цепи
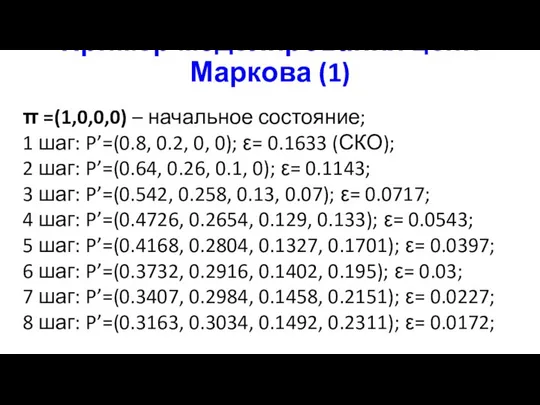
Пример моделирования цепи Маркова (1)
π =(1,0,0,0) – начальное состояние;
1 шаг: P’=(0.8,
Пример моделирования цепи Маркова (1)
π =(1,0,0,0) – начальное состояние;
1 шаг: P’=(0.8,
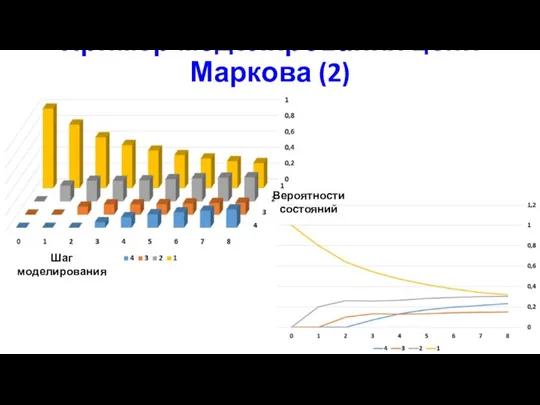
Пример моделирования цепи Маркова (2)
Шаг моделирования
Вероятности состояний
Пример моделирования цепи Маркова (2)
Шаг моделирования
Вероятности состояний
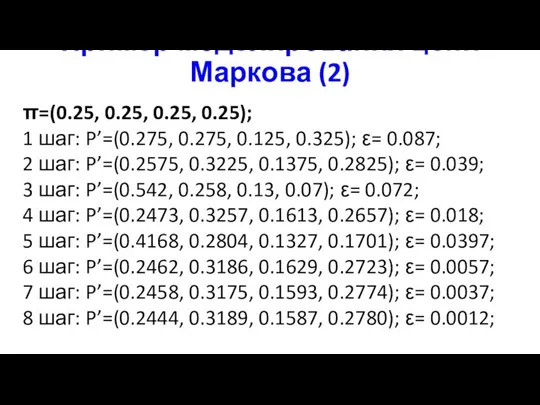
Пример моделирования цепи Маркова (2)
π=(0.25, 0.25, 0.25, 0.25);
1 шаг: P’=(0.275, 0.275,
Пример моделирования цепи Маркова (2)
π=(0.25, 0.25, 0.25, 0.25);
1 шаг: P’=(0.275, 0.275,
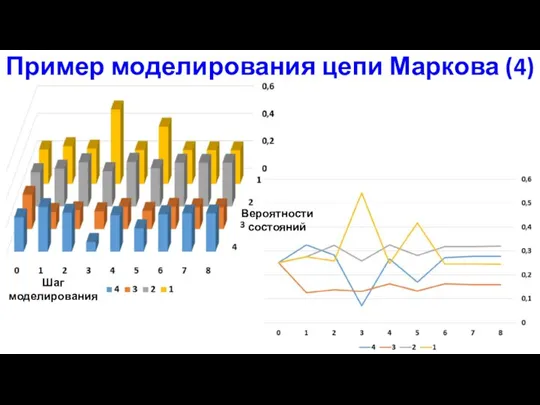
Пример моделирования цепи Маркова (4)
Шаг моделирования
Вероятности состояний
Пример моделирования цепи Маркова (4)
Шаг моделирования
Вероятности состояний
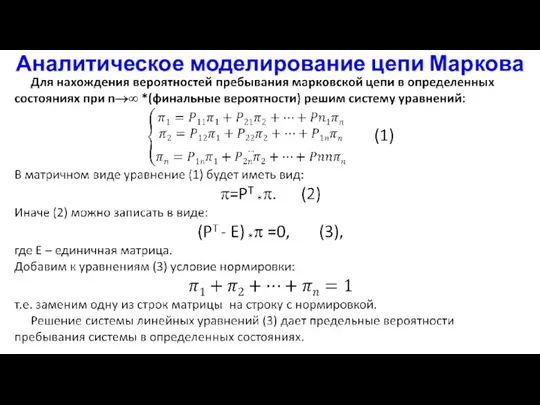
Аналитическое моделирование цепи Маркова
Аналитическое моделирование цепи Маркова
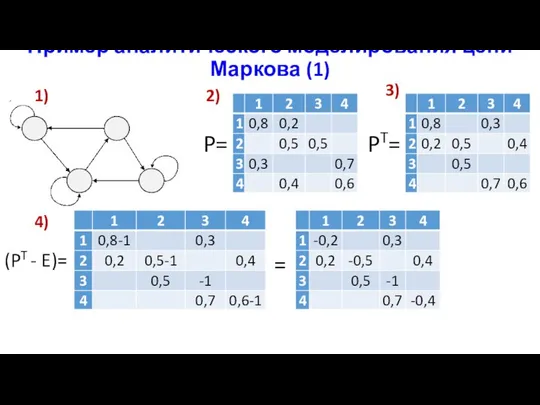
Пример аналитического моделирования цепи Маркова (1)
P=
PT=
1)
2)
3)
4)
(PT - E)=
=
Пример аналитического моделирования цепи Маркова (1)
P=
PT=
1)
2)
3)
4)
(PT - E)=
=
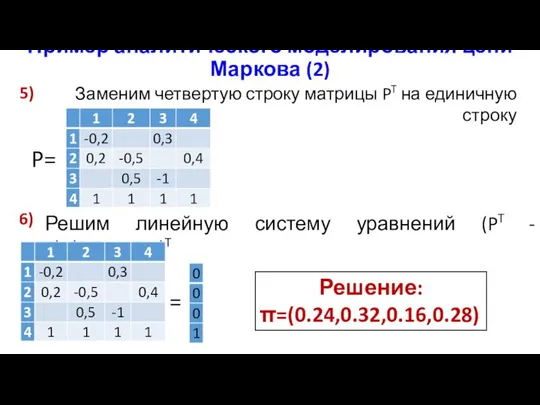
Пример аналитического моделирования цепи Маркова (2)
5)
Решим линейную систему уравнений (PT -
Пример аналитического моделирования цепи Маркова (2)
5)
Решим линейную систему уравнений (PT -
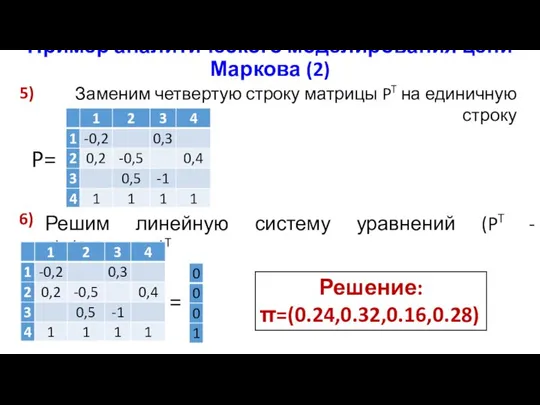
Пример аналитического моделирования цепи Маркова (2)
5)
Решим линейную систему уравнений (PT -
Пример аналитического моделирования цепи Маркова (2)
5)
Решим линейную систему уравнений (PT -
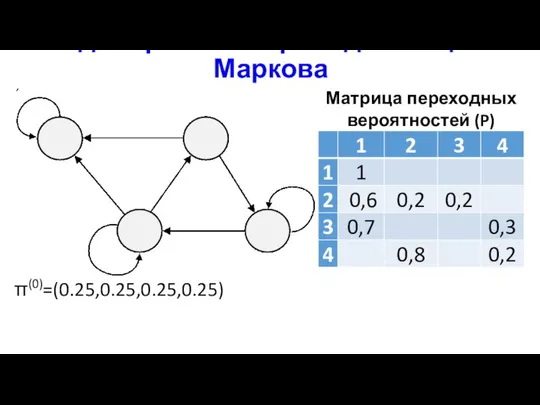
Моделирование приводимой цепи Маркова
Матрица переходных вероятностей (P)
π(0)=(0.25,0.25,0.25,0.25)
Моделирование приводимой цепи Маркова
Матрица переходных вероятностей (P)
π(0)=(0.25,0.25,0.25,0.25)
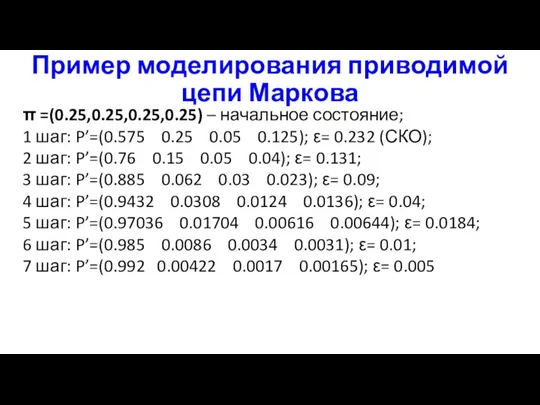
Пример моделирования приводимой цепи Маркова
π =(0.25,0.25,0.25,0.25) – начальное состояние;
1 шаг: P’=(0.575
Пример моделирования приводимой цепи Маркова
π =(0.25,0.25,0.25,0.25) – начальное состояние;
1 шаг: P’=(0.575
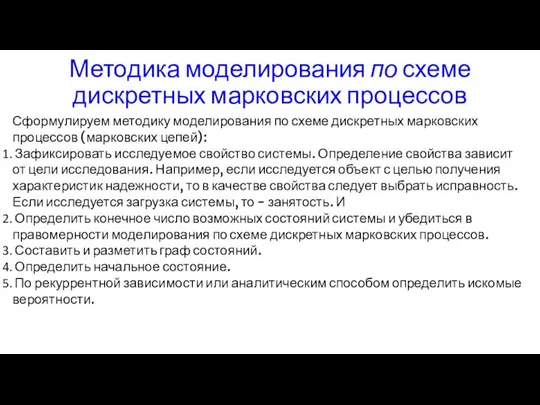
Методика моделирования по схеме дискретных марковских процессов
Сформулируем методику моделирования по схеме дискретных марковских процессов (марковских
Методика моделирования по схеме дискретных марковских процессов
Сформулируем методику моделирования по схеме дискретных марковских процессов (марковских
 Многоугольник
Многоугольник Координаты вектора
Координаты вектора Задания для тех, кто не боится трудностей
Задания для тех, кто не боится трудностей Численное интегрирование
Численное интегрирование Игра для 4 классов
Игра для 4 классов  Длина окружности
Длина окружности Деревья. Дерево - граф без циклов
Деревья. Дерево - граф без циклов Конус. Площадь поверхности конуса
Конус. Площадь поверхности конуса “Пусть кто-нибудь попробует вычеркнуть из математики степени, и он увидит, что без них далеко не уедешь”. (М.В.Ломоносов)
“Пусть кто-нибудь попробует вычеркнуть из математики степени, и он увидит, что без них далеко не уедешь”. (М.В.Ломоносов) Сумма и разность кубов двух выражений алгебра 7 класс
Сумма и разность кубов двух выражений алгебра 7 класс Післяоптимізаційний аналіз задач лінійного програмування
Післяоптимізаційний аналіз задач лінійного програмування Роль математики в современном мире
Роль математики в современном мире Зависимость произведений фрактального искусства от вида математических формул
Зависимость произведений фрактального искусства от вида математических формул Повторение материала геометрии 10 класса.1 часть
Повторение материала геометрии 10 класса.1 часть Вес тела. Вес тела. Невесомость.
Вес тела. Вес тела. Невесомость. Урок в 5 классе МБОУ «Оргетская СОШ имени Т.И.Петрова» Учитель: Кириллина Л.М.
Урок в 5 классе МБОУ «Оргетская СОШ имени Т.И.Петрова» Учитель: Кириллина Л.М.  Деление десятичных дробей на натуральные числа
Деление десятичных дробей на натуральные числа Предел функции в точке
Предел функции в точке Решение заданий по математике. ЕГЄ
Решение заданий по математике. ЕГЄ Решение уравнений. (6 класс)
Решение уравнений. (6 класс) Основы математического анализа результатов экспериментального исследования
Основы математического анализа результатов экспериментального исследования Экстремумы функции
Экстремумы функции МАТЕМАТИКА 1 КЛАСС
МАТЕМАТИКА 1 КЛАСС  Нумерация чисел в пределах 10. (1 класс)
Нумерация чисел в пределах 10. (1 класс) Подготовка к ГИА. Теория вероятности. 9 класс
Подготовка к ГИА. Теория вероятности. 9 класс Урок математики Устный счет
Урок математики Устный счет Симметрия в кубе, параллелепипеде, призме и пирамиде
Симметрия в кубе, параллелепипеде, призме и пирамиде Геометрия вокруг нас
Геометрия вокруг нас